Orice problemă care implică corpuri în mișcare în mecanica clasică necesită cunoașterea conceptului de impuls. Acest articol discută acest concept, oferă un răspuns la întrebarea unde este direcționat vectorul de impuls al corpului și oferă, de asemenea, un exemplu de rezolvare a problemei.
Cantitatea de mișcare
Pentru a afla unde este îndreptat vectorul de impuls al unui corp, ar trebui în primul rând să înțelegeți semnificația sa fizică. Termenul a fost explicat pentru prima dată de Isaac Newton, dar este important de menționat că omul de știință italian Galileo Galilei a folosit deja un concept similar în lucrările sale. Pentru a caracteriza un obiect în mișcare, el a introdus o cantitate numită impuls, presiune sau impuls în sine (impeto în italiană). Meritul lui Isaac Newton constă în faptul că a fost capabil să conecteze această caracteristică cu forțele care acționează asupra corpului.
Deci, inițial și mai corect, ceea ce cei mai mulți înțeleg prin impulsul unui corp se numește cantitatea de mișcare. Într-adevăr, formula matematică pentru cantitatea luată în considerare este scrisă sub forma:
Aici m este masa corpului, v¯ este viteza acestuia. După cum se vede din formulă, nu vorbim despre niciun impuls, există doar viteza corpului și masa acestuia, adică cantitatea de mișcare.
Este important de reținut că această formulă nu rezultă din demonstrații sau expresii matematice. Apariția sa în fizică are un caracter exclusiv intuitiv, cotidian. Deci, orice persoană știe bine că, dacă o muscă și un camion se mișcă cu aceeași viteză, atunci va fi mult mai dificil să oprească camionul, deoarece are mult mai multă mișcare decât o insectă.

De unde provine conceptul de vector de impuls al corpului este discutat mai jos.
Impulsul de forță este motivul schimbării impulsului
Newton a reușit să conecteze caracteristica introdusă intuitiv cu a doua lege care îi poartă numele.
Impulsul de forță este o mărime fizică cunoscută care este egală cu produsul dintre forța externă aplicată unui anumit corp și durata acțiunii acestuia. Folosind binecunoscuta lege a lui Newton și presupunând că forța nu depinde de timp, putem ajunge la expresia:
F¯ * Δt = m * a¯ * Δt.
Aici Δt este timpul de acțiune al forței F, a este accelerația liniară transmisă de forța F unui corp de masă m. După cum se știe, înmulțirea accelerației unui corp cu perioada de timp în care acesta acționează dă o creștere a vitezei. Acest fapt ne permite să rescriem formula de mai sus într-o formă ușor diferită:
F¯ * Δt = m * Δv¯, unde Δv¯= a¯ * Δt.
Partea dreaptă a egalității reprezintă modificarea impulsului (vezi expresia din paragraful anterior). Apoi se va dovedi:
F¯ * Δt = Δp¯, unde Δp¯ = m * Δv¯.
Astfel, folosind legea lui Newton și conceptul de impuls, putem ajunge la o concluzie importantă: influența unei forțe externe asupra unui obiect într-o perioadă de timp duce la o schimbare a impulsului acestuia.

Acum devine clar de ce cantitatea de mișcare este de obicei numită impuls, deoarece schimbarea ei coincide cu impulsul forței (cuvântul „forță” este de obicei omis).
Cantitatea vectorială p¯

Unele cantități (F¯, v¯, a¯, p¯) au o bară deasupra lor. Aceasta înseamnă că vorbim despre o caracteristică vectorială. Adică, cantitatea de mișcare, la fel ca viteza, forța și accelerația, pe lângă valoarea absolută (modul), este descrisă și prin direcție.
Deoarece fiecare vector poate fi descompus în componente individuale, folosind sistemul de coordonate dreptunghiular cartezian, putem scrie următoarele egalități:
1) p¯ = m * v¯;
2) p x = m * v x ; p y = m * v y ; p z = m * v z ;
3) |p¯| = √(p x 2 + p y 2 + p z 2).
Aici, prima expresie este o formă vectorială de reprezentare a impulsului, al doilea set de formule vă permite să calculați fiecare dintre componentele impulsului p¯, cunoscând componentele corespunzătoare ale vitezei (indicii x, y, z indică proiecția lui). vectorul pe axa de coordonate corespunzătoare). În cele din urmă, a treia formulă vă permite să calculați lungimea vectorului impuls (valoarea absolută a mărimii) prin componentele sale.
Unde este îndreptat vectorul impuls al corpului?
Având în vedere conceptul de impuls p¯ și proprietățile sale de bază, putem răspunde cu ușurință la întrebarea pusă. Vectorul de impuls al corpului este direcționat în același mod ca vectorul viteză liniară. Într-adevăr, din matematică se știe că înmulțirea unui vector a¯ cu un număr k duce la formarea unui nou vector b¯, care are următoarele proprietăți:
- lungimea sa este egală cu produsul dintre numărul și modulul vectorului original, adică |b¯| = k * |a¯|;
- este direcționat în același mod ca vectorul original dacă k > 0, altfel va fi direcționat opus a¯.
În acest caz, rolul vectorului a¯ este jucat de viteza v¯, impulsul p¯ este noul vector b¯, iar numărul k este masa corpului m. Deoarece acesta din urmă este întotdeauna pozitiv (m>0), atunci, răspunzând la întrebarea: care este direcția vectorului de impuls al corpului p¯, trebuie spus că este co-direcționat cu viteza v¯.
Vector de schimbare a impulsului
Este interesant să luăm în considerare o altă întrebare similară: unde este direcționat vectorul de schimbare a impulsului corpului, adică Δp¯. Pentru a răspunde la aceasta, ar trebui să utilizați formula obținută mai sus:
F¯ * Δt = m * Δv¯ = Δp¯.
Pe baza raționamentului din paragraful anterior, putem spune că direcția de schimbare a impulsului Δp¯ coincide cu direcția vectorului forță F¯ (Δt > 0) sau cu direcția vectorului de modificare a vitezei Δv¯ (m > 0).
Este important aici să nu confundam că vorbim în mod specific despre modificări ale cantităților. În cazul general, vectorii p¯ și Δp¯ nu coincid, deoarece nu sunt legați între ei în niciun fel. De exemplu, dacă forța F¯ acționează împotriva vitezei v¯ a obiectului, atunci p¯ și Δp¯ vor fi direcționate în direcții opuse.
Unde este important să se țină cont de natura vectorială a impulsului?

Întrebările discutate mai sus: unde sunt direcționate vectorul impulsului corpului și vectorul schimbării acestuia, nu se datorează unei simple curiozități. Faptul este că legea conservării impulsului p¯ este îndeplinită pentru fiecare dintre componentele sale. Adică, în forma sa cea mai completă, este scris după cum urmează:
p x = m * v x ; p y = m * v y ; p z = m * v z .
Fiecare componentă a vectorului p¯ își păstrează valoarea în sistemul de obiecte care interacționează care nu sunt afectate de forțele externe (Δp¯ = 0).
Cum să folosiți această lege și reprezentările vectoriale ale mărimii p¯ pentru a rezolva probleme care implică interacțiunea (coliziunea) corpurilor?
Problema cu doua bile
Figura de mai jos arată două bile de mase diferite care zboară în unghiuri diferite pe o linie orizontală. Fie masele bilelor m 1 = 1 kg, m 2 = 0,5 kg, viteza lor v 1 = 2 m/s, v 2 = 3 m/s. Este necesar să se determine direcția impulsului după impactul bilelor, presupunând că acestea din urmă sunt absolut inelastice.

Când începeți să rezolvați problema, ar trebui să scrieți legea constanței momentului în formă vectorială, adică:
p 1 ¯ + p 2 ¯ = const.
Deoarece fiecare componentă a impulsului trebuie conservată, trebuie să rescriem această expresie, ținând cont și de faptul că după ciocnire cele două bile vor începe să se miște ca un singur obiect (impact absolut inelastic):
m 1 * v 1x + m 2 * v 2x = (m 1 + m 2) * u x ;
M 1 * v 1y + m 2 * v 2y = (m 1 + m 2) * u y .
Semnul minus pentru proiecția impulsului primului corp pe axa y a apărut datorită direcției sale față de vectorul selectat al axei ordonatelor (vezi figura).
Acum trebuie să exprimați componentele necunoscute ale vitezei u și apoi să înlocuiți valorile cunoscute în expresii (proiecțiile corespunzătoare ale vitezelor sunt determinate prin înmulțirea mărimilor vectorilor v 1 ¯ și v 2 ¯ cu funcții trigonometrice ):
u x = (m 1 * v 1x + m 2 * v 2x) / (m 1 + m 2), v 1x = v 1 * cos(45 o); v 2x = v 2 * cos(30 o);
u x = (1 * 2 * 0,7071 + 0,5 * 3 * 0,866) / (1 + 0,5) = 1,8088 m/s;
u y = (-m 1 * v 1y + m 2 * v 2y) / (m 1 + m 2), v 1y = v 1 * sin(45 o); v 2y = v 2 * sin(30 o);
u y = (-1 * 2 * 0,7071 + 0,5 * 3 * 0,5) / (1 + 0,5) = -0,4428 m/s.
Acestea sunt două componente ale vitezei corpului după impact și „lipirea” mingilor. Deoarece direcția vitezei coincide cu vectorul impuls p¯, se poate răspunde la întrebarea problemei dacă se determină u¯. Unghiul său față de axa orizontală va fi egal cu arctangente a raportului componentelor u y și u x:
α = arctan(-0,4428 / 1,8088) = -13,756 o.
Semnul minus indică faptul că impulsul (viteza) după impact va fi direcționat în jos de pe axa x.
Un glonț de calibru 22 are o masă de doar 2 g. Dacă arunci cuiva un astfel de glonț, acesta îl poate prinde ușor chiar și fără mănuși. Dacă încercați să prindeți un astfel de glonț care zboară din bot cu o viteză de 300 m/s, atunci nici mănușile nu vă vor ajuta.
Dacă un cărucior de jucărie se rostogolește spre tine, îl poți opri cu degetul de la picior. Dacă un camion se rostogolește spre tine, ar trebui să-ți muți picioarele din cale.


Să luăm în considerare o problemă care demonstrează legătura dintre un impuls de forță și o modificare a impulsului unui corp.
Exemplu. Masa mingii este de 400 g, viteza pe care mingea a dobândit-o după impact este de 30 m/s. Forța cu care piciorul a acționat asupra mingii a fost de 1500 N, iar timpul de impact a fost de 8 ms. Găsiți impulsul forței și modificarea impulsului corpului pentru minge.

Modificarea impulsului corpului
Exemplu. Estimați forța medie de la podea care acționează asupra mingii în timpul impactului.
1) În timpul unei lovituri, asupra mingii acționează două forțe: forța de reacție a solului, gravitația.

Forța de reacție se modifică în timpul impactului, astfel încât este posibil să se găsească forța medie de reacție a podelei.
2) Modificarea impulsului  corpul prezentat în imagine
corpul prezentat în imagine

3) Din a doua lege a lui Newton

Principalul lucru de reținut
1) Formule pentru impulsul corpului, impulsul de forță;
2) Direcția vectorului de impuls;
3) Aflați modificarea impulsului corpului
Derivarea celei de-a doua legi a lui Newton în formă generală

Graficul F(t). Forță variabilă
Impulsul de forță este numeric egal cu aria figurii de sub graficul F(t).

Dacă forța nu este constantă în timp, de exemplu, ea crește liniar F=kt, atunci impulsul acestei forțe este egal cu aria triunghiului. Puteți înlocui această forță cu o forță constantă care va schimba impulsul corpului cu aceeași cantitate în aceeași perioadă de timp.

Forța medie rezultantă
LEGEA CONSERVĂRII MOMENTULUI
Testare online
Sistem închis de corpuri
Acesta este un sistem de corpuri care interacționează doar între ele. Nu există forțe externe de interacțiune.
În lumea reală, un astfel de sistem nu poate exista; nu există nicio modalitate de a elimina orice interacțiune externă. Un sistem închis de corpuri este un model fizic, la fel cum un punct material este un model. Acesta este un model al unui sistem de corpuri care se presupune că interacționează doar între ele; forțele externe nu sunt luate în considerare, sunt neglijate.
Legea conservării impulsului
Într-un sistem închis de corpuri vector suma momentelor corpurilor nu se modifică atunci când corpurile interacționează. Dacă impulsul unui corp a crescut, aceasta înseamnă că în acel moment impulsul unui alt corp (sau mai multor corpuri) a scăzut exact cu aceeași cantitate.
Să luăm în considerare acest exemplu. O fată și un băiat patinează. Un sistem închis de corpuri - o fată și un băiat (neglijăm frecarea și alte forțe externe). Fata stă nemișcată, impulsul ei este zero, deoarece viteza este zero (vezi formula pentru impulsul unui corp). După ce un băiat care se mișcă cu o anumită viteză se ciocnește de o fată, ea va începe și ea să se miște. Acum corpul ei are impuls. Valoarea numerică a impulsului fetei este exact aceeași cu cât de mult a scăzut impulsul băiatului după ciocnire.
Un corp cu o masă de 20 kg se deplasează cu o viteză, un al doilea corp cu o masă de 4 kg se mișcă în aceeași direcție cu o viteză de . Care sunt impulsurile fiecărui corp? Care este impulsul sistemului?


Impulsul unui sistem de corpuri este suma vectorială a momentelor tuturor corpurilor incluse în sistem. În exemplul nostru, aceasta este suma a doi vectori (deoarece sunt considerate două corpuri) care sunt direcționați în aceeași direcție, prin urmare

Acum să calculăm impulsul sistemului de corpuri din exemplul anterior dacă al doilea corp se mișcă în direcția opusă.

Deoarece corpurile se mișcă în direcții opuse, obținem o sumă vectorială de impulsuri multidirecționale. Citiți mai multe despre suma vectorială.
Principalul lucru de reținut
1) Ce este un sistem închis de corpuri;
2) Legea conservării impulsului și aplicarea acesteia
Impulsul corpului
Momentul unui corp este o cantitate egală cu produsul dintre masa corpului și viteza acestuia.
De reținut că vorbim despre un corp care poate fi reprezentat ca punct material. Elanul corpului ($p$) se mai numește și impulsul. Conceptul de impuls a fost introdus în fizică de René Descartes (1596–1650). Termenul „impuls” a apărut mai târziu (impulsus în latină înseamnă „împingere”). Momentul este o mărime vectorială (cum ar fi viteza) și este exprimată prin formula:
$p↖(→)=mυ↖(→)$
Direcția vectorului impuls coincide întotdeauna cu direcția vitezei.
Unitatea SI a impulsului este impulsul unui corp cu o masă de $1$ kg care se mișcă cu o viteză de $1$ m/s; prin urmare, unitatea de impuls este $1$ kg $·$ m/s.
Dacă o forță constantă acționează asupra unui corp (punct material) într-o perioadă de timp $∆t$, atunci și accelerația va fi constantă:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
unde $(υ_1)↖(→)$ și $(υ_2)↖(→)$ sunt vitezele inițiale și finale ale corpului. Înlocuind această valoare în expresia celei de-a doua legi a lui Newton, obținem:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Deschizând parantezele și folosind expresia pentru impulsul corpului, avem:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Aici $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ este modificarea impulsului în timp $∆t$. Atunci ecuația anterioară va lua forma:
$∆p↖(→)=F↖(→)∆t$
Expresia $∆p↖(→)=F↖(→)∆t$ este o reprezentare matematică a celei de-a doua legi a lui Newton.
Se numește produsul unei forțe și durata acțiunii acesteia impuls de forță. De aceea modificarea impulsului unui punct este egală cu modificarea impulsului forței care acționează asupra acestuia.
Expresia $∆p↖(→)=F↖(→)∆t$ se numește ecuația mișcării corpului. Trebuie remarcat faptul că aceeași acțiune - o modificare a impulsului unui punct - poate fi realizată printr-o forță mică pe o perioadă lungă de timp și printr-o forță mare pe o perioadă scurtă de timp.
Impulsul sistemului tel. Legea schimbării impulsului
Impulsul (cantitatea de mișcare) unui sistem mecanic este un vector egal cu suma impulsurilor tuturor punctelor materiale ale acestui sistem:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Legile schimbării și conservării impulsului sunt o consecință a celei de-a doua și a treia legi a lui Newton.
Să considerăm un sistem format din două corpuri. Forțele ($F_(12)$ și $F_(21)$ din figură cu care corpurile sistemului interacționează între ele se numesc interne.
Fie ca, pe lângă forțele interne, forțele externe $(F_1)↖(→)$ și $(F_2)↖(→)$ acționează asupra sistemului. Pentru fiecare corp putem scrie ecuația $∆p↖(→)=F↖(→)∆t$. Adăugând părțile stânga și dreaptă ale acestor ecuații, obținem:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Conform celei de-a treia legi a lui Newton, $(F_(12))↖(→)=-(F_(21))↖(→)$.
Prin urmare,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
În partea stângă există o sumă geometrică a modificărilor impulsurilor tuturor corpurilor sistemului, egală cu modificarea impulsului sistemului însuși - $(∆p_(syst))↖(→)$. cont, egalitatea $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ poate fi scrisă:
$(∆p_(sistem))↖(→)=F↖(→)∆t$
unde $F↖(→)$ este suma tuturor forțelor externe care acționează asupra corpului. Rezultatul obținut înseamnă că impulsul sistemului poate fi modificat doar de forțe externe, iar modificarea impulsului sistemului este direcționată în același mod ca și forța externă totală. Aceasta este esența legii schimbării impulsului unui sistem mecanic.
Forțele interne nu pot schimba impulsul total al sistemului. Ele schimbă doar impulsurile corpurilor individuale ale sistemului.
Legea conservării impulsului
Legea conservării impulsului rezultă din ecuația $(∆p_(syst))↖(→)=F↖(→)∆t$. Dacă asupra sistemului nu acționează nicio forță externă, atunci partea dreaptă a ecuației $(∆p_(syst))↖(→)=F↖(→)∆t$ devine zero, ceea ce înseamnă că impulsul total al sistemului rămâne neschimbat. :
$(∆p_(syst))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Se numește un sistem asupra căruia nu acționează forțe externe sau rezultanta forțelor externe este zero închis.
Legea conservării impulsului spune:
Momentul total al unui sistem închis de corpuri rămâne constant pentru orice interacțiune a corpurilor sistemului între ele.
Rezultatul obținut este valabil pentru un sistem care conține un număr arbitrar de corpuri. Dacă suma forțelor externe nu este egală cu zero, dar suma proiecțiilor lor către o anumită direcție este egală cu zero, atunci proiecția impulsului sistemului în această direcție nu se modifică. Deci, de exemplu, un sistem de corpuri de pe suprafața Pământului nu poate fi considerat închis din cauza forței gravitaționale care acționează asupra tuturor corpurilor, cu toate acestea, suma proiecțiilor impulsurilor pe direcția orizontală poate rămâne neschimbată (în absență de frecare), deoarece în această direcție forța gravitației nu funcționează.
Propulsie cu reacție
Să luăm în considerare exemple care confirmă validitatea legii conservării impulsului.
Să luăm o minge de cauciuc pentru copii, să o umflem și să o eliberăm. Vom vedea că atunci când aerul începe să-l părăsească într-o direcție, mingea însăși va zbura în cealaltă. Mișcarea unei mingi este un exemplu de mișcare a jetului. Se explică prin legea conservării impulsului: impulsul total al sistemului „minge plus aer în el” înainte ca aerul să curgă afară este zero; trebuie să rămână egal cu zero în timpul mișcării; prin urmare, bila se mișcă în direcția opusă direcției de curgere a jetului și cu o astfel de viteză încât impulsul său este egal ca mărime cu impulsul jetului de aer.
Mișcare cu jet numiți mișcarea unui corp care are loc atunci când o parte a acestuia este separată de el cu orice viteză. Datorită legii conservării impulsului, direcția de mișcare a corpului este opusă direcției de mișcare a părții separate.
Zborurile cu rachete se bazează pe principiul propulsiei cu reacție. O rachetă spațială modernă este o aeronavă foarte complexă. Masa rachetei constă din masa fluidului de lucru (adică gazele fierbinți formate ca urmare a arderii combustibilului și emise sub forma unui curent cu jet) și masa finală sau, după cum se spune, „uscata” a rachetei. racheta rămasă după ejectarea fluidului de lucru din rachetă.
Atunci când un jet de gaz este aruncat dintr-o rachetă cu viteză mare, racheta însăși se repezi în direcția opusă. Conform legii conservării impulsului, impulsul $m_(p)υ_p$ dobândit de rachetă trebuie să fie egal cu impulsul $m_(gaz)·υ_(gaz)$ al gazelor ejectate:
$m_(p)υ_p=m_(gaz)·υ_(gaz)$
Rezultă că viteza rachetei
$υ_p=((m_(gaz))/(m_p))·υ_(gaz)$
Din această formulă este clar că cu cât viteza rachetei este mai mare, cu atât viteza gazelor emise este mai mare și raportul dintre masa fluidului de lucru (adică masa combustibilului) și cea finală („uscat”). masa rachetei.
Formula $υ_p=((m_(gaz))/(m_p))·υ_(gaz)$ este aproximativă. Nu ia în considerare faptul că pe măsură ce combustibilul arde, masa rachetei zburătoare devine din ce în ce mai mică. Formula exactă pentru viteza rachetei a fost obținută în 1897 de K. E. Tsiolkovsky și îi poartă numele.
Munca de forta
Termenul „muncă” a fost introdus în fizică în 1826 de către omul de știință francez J. Poncelet. Dacă în viața de zi cu zi numai munca umană se numește muncă, atunci în fizică și, în special, în mecanică, este general acceptat că munca este efectuată cu forța. Cantitatea fizică de muncă este de obicei indicată cu litera $A$.
Munca de forta este o măsură a acțiunii unei forțe, în funcție de mărimea și direcția acesteia, precum și de mișcarea punctului de aplicare a forței. Pentru o forță constantă și o deplasare liniară, munca este determinată de egalitatea:
$A=F|∆r↖(→)|cosα$
unde $F$ este forța care acționează asupra corpului, $∆r↖(→)$ este deplasarea, $α$ este unghiul dintre forță și deplasare.

Lucrul forței este egal cu produsul dintre modulele forței și deplasarea și cosinusul unghiului dintre ei, adică produsul scalar al vectorilor $F↖(→)$ și $∆r↖(→)$.
Munca este o mărime scalară. Dacă $α 0$, iar dacă $90°
Când mai multe forțe acționează asupra unui corp, munca totală (suma muncii tuturor forțelor) este egală cu munca forței rezultate.
Unitatea de lucru în SI este joule($1$ J). $1$ J este munca efectuată de o forță de $1$ N de-a lungul unui drum de $1$ m în direcția de acțiune a acestei forțe. Această unitate este numită după omul de știință englez J. Joule (1818-1889): $1$ J = $1$ N $·$ m. Kilojulii și milijoulii sunt, de asemenea, adesea folosiți: $1$ kJ $= 1.000$ J, $1$ mJ $ = 0,001 USD J.
Munca gravitatiei
Să considerăm un corp care alunecă de-a lungul unui plan înclinat cu un unghi de înclinare $α$ și o înălțime $H$.

Să exprimăm $∆x$ în termeni de $H$ și $α$:
$∆x=(H)/(sinα)$
Având în vedere că forța gravitațională $F_т=mg$ formează un unghi ($90° - α$) cu direcția de mișcare, folosind formula $∆x=(H)/(sin)α$, obținem o expresie pentru munca gravitațională $A_g$:
$A_g=mg cos(90°-α) (H)/(sinα)=mgH$
Din această formulă este clar că munca gravitațională depinde de înălțime și nu depinde de unghiul de înclinare al planului.
Rezultă că:
- munca gravitației nu depinde de forma traiectoriei de-a lungul căreia se mișcă corpul, ci doar de poziția inițială și finală a corpului;
- când un corp se mișcă de-a lungul unei traiectorii închise, munca efectuată de gravitație este zero, adică gravitația este o forță conservativă (forțele care au această proprietate se numesc conservative).
Lucrul forțelor de reacție, este egală cu zero, deoarece forța de reacție ($N$) este direcționată perpendicular pe deplasarea $∆x$.
Munca forței de frecare
Forța de frecare este îndreptată opus deplasării $∆x$ și formează cu aceasta un unghi de $180°$, prin urmare munca forței de frecare este negativă:
$A_(tr)=F_(tr)∆x·cos180°=-F_(tr)·∆x$
Deoarece $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ atunci
$A_(tr)=μmgHctgα$
Lucru de forță elastică
Fie ca o forță exterioară $F↖(→)$ să acționeze asupra unui arc neîntins de lungime $l_0$, întinzându-l cu $∆l_0=x_0$. În poziţia $x=x_0F_(control)=kx_0$. După ce forța $F↖(→)$ încetează să mai acționeze în punctul $x_0$, arcul este comprimat sub acțiunea forței $F_(control)$.

Să determinăm lucrul forței elastice atunci când coordonatele capătului drept al arcului se schimbă de la $x_0$ la $x$. Deoarece forța elastică din această zonă se modifică liniar, legea lui Hooke poate folosi valoarea medie în această zonă:
$F_(control av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Atunci lucrarea (ținând cont de faptul că direcțiile $(F_(control av.))↖(→)$ și $(∆x)↖(→)$ coincid) este egală cu:
$A_(control)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Se poate arăta că forma ultimei formule nu depinde de unghiul dintre $(F_(control av.))↖(→)$ și $(∆x)↖(→)$. Munca forțelor elastice depinde numai de deformațiile arcului în starea inițială și finală.
Astfel, forța elastică, ca și forța gravitațională, este o forță conservativă.
Putere de putere
Puterea este o mărime fizică măsurată prin raportul dintre muncă și perioada de timp în care este produsă.
Cu alte cuvinte, puterea arată cât de multă muncă este făcută pe unitatea de timp (în SI - per $1$ s).
Puterea este determinată de formula:
unde $N$ este puterea, $A$ este munca efectuată în timpul $∆t$.
Substituind în formula $N=(A)/(∆t)$ în locul lucrării $A$ expresia ei $A=F|(∆r)↖(→)|cosα$, obținem:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Puterea este egală cu produsul dintre mărimile vectorilor forță și viteză și cosinusul unghiului dintre acești vectori.
Puterea din sistemul SI este măsurată în wați (W). Un watt ($1$ W) este puterea la care se efectuează $1$ J de lucru pentru $1$ s: $1$ W $= 1$ J/s.
Această unitate poartă numele inventatorului englez J. Watt (Watt), care a construit primul motor cu abur. Însuși J. Watt (1736-1819) a folosit o altă unitate de putere - cai putere (cp), pe care a introdus-o pentru a putea compara performanța unui motor cu abur și a unui cal: $1$ cp. $= 735,5 $ W.
În tehnologie, se folosesc adesea unități de putere mai mari - kilowați și megawați: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
Energie kinetică. Legea modificării energiei cinetice
Dacă un corp sau mai multe corpuri care interacționează (un sistem de corpuri) pot lucra, atunci se spune că au energie.
Cuvântul „energie” (din greacă energia - acțiune, activitate) este adesea folosit în viața de zi cu zi. De exemplu, oamenii care pot lucra rapid sunt numiți energici, având o mare energie.
Energia deținută de un corp datorită mișcării se numește energie cinetică.
Ca și în cazul definiției energiei în general, putem spune despre energia cinetică că energia cinetică este capacitatea unui corp în mișcare de a lucra.
Să aflăm energia cinetică a unui corp de masă $m$ care se mișcă cu o viteză $υ$. Deoarece energia cinetică este energie datorată mișcării, starea sa zero este starea în care corpul se află în repaus. După ce am găsit munca necesară pentru a conferi o anumită viteză unui corp, vom găsi energia cinetică a acestuia.
Pentru a face acest lucru, să calculăm lucrul în zona deplasării $∆r↖(→)$ atunci când direcțiile vectorilor de forță $F↖(→)$ și deplasarea $∆r↖(→)$ coincid. În acest caz, munca este egală
unde $∆x=∆r$

Pentru mișcarea unui punct cu accelerația $α=const$, expresia deplasării are forma:
$∆x=υ_1t+(la^2)/(2),$
unde $υ_1$ este viteza inițială.
Substituind în ecuația $A=F·∆x$ expresia pentru $∆x$ din $∆x=υ_1t+(at^2)/(2)$ și folosind a doua lege a lui Newton $F=ma$, obținem:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Exprimând accelerația prin vitezele inițiale $υ_1$ și finale $υ_2$ $a=(υ_2-υ_1)/(t)$ și substituind în $A=ma(υ_1t+(at^2)/(2))=(mat )/ (2)(2υ_1+at)$ avem:
$A=(m(υ_2-υ_1))/(2)·(2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Acum echivalând viteza inițială cu zero: $υ_1=0$, obținem o expresie pentru energie kinetică:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Astfel, un corp în mișcare are energie cinetică. Această energie este egală cu munca care trebuie făcută pentru a crește viteza corpului de la zero la valoarea $υ$.
Din $E_K=(mυ)/(2)=(p^2)/(2m)$ rezultă că munca efectuată de o forță pentru a muta un corp dintr-o poziție în alta este egală cu modificarea energiei cinetice:
$A=E_(K_2)-E_(K_1)=∆E_K$
Egalitatea $A=E_(K_2)-E_(K_1)=∆E_K$ exprimă teorema privind modificarea energiei cinetice.
Modificarea energiei cinetice a corpului(punct material) pentru o anumită perioadă de timp este egală cu munca efectuată în acest timp de forța care acționează asupra corpului.
Energie potențială
Energia potențială este energia determinată de poziția relativă a corpurilor sau părților aceluiași corp care interacționează.
Deoarece energia este definită ca abilitatea unui corp de a lucra, energia potențială este definită în mod natural ca munca efectuată de o forță, în funcție doar de poziția relativă a corpurilor. Aceasta este munca gravitației $A=mgh_1-mgh_2=mgH$ și munca elasticității:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Energia potențială a corpului interacționând cu Pământul, ei numesc o cantitate egală cu produsul dintre masa $m$ a acestui corp prin accelerația căderii libere $g$ și înălțimea $h$ a corpului deasupra suprafeței Pământului:
Energia potențială a unui corp deformat elastic este o valoare egală cu jumătate din produsul dintre coeficientul de elasticitate (rigiditate) $k$ al corpului și deformația la pătrat $∆l$:
$E_p=(1)/(2)k∆l^2$
Lucrul forțelor conservatoare (gravitație și elasticitate), ținând cont de $E_p=mgh$ și $E_p=(1)/(2)k∆l^2$, se exprimă astfel:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Această formulă ne permite să oferim o definiție generală a energiei potențiale.
Energia potențială a unui sistem este o mărime care depinde de poziția corpurilor, schimbarea în care în timpul tranziției sistemului de la starea inițială la starea finală este egală cu munca forțelor conservatoare interne ale sistemului, luate cu semnul opus.
Semnul minus din partea dreaptă a ecuației $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ înseamnă că atunci când munca este efectuată de forțe interne ( de exemplu, o cădere corpuri pe pământ sub influența gravitației în sistemul „rocă-Pământ”), energia sistemului scade. Munca și modificările energiei potențiale dintr-un sistem au întotdeauna semne opuse.
Deoarece munca determină doar o schimbare a energiei potențiale, atunci numai o schimbare a energiei are un sens fizic în mecanică. Prin urmare, alegerea nivelului de energie zero este arbitrară și determinată numai de considerente de comoditate, de exemplu, ușurința de a scrie ecuațiile corespunzătoare.
Legea schimbării și conservării energiei mecanice
Energia mecanică totală a sistemului suma energiilor sale cinetice și potențiale se numește:
Este determinată de poziția corpurilor (energia potențială) și viteza lor (energia cinetică).
Conform teoremei energiei cinetice,
$E_k-E_(k_1)=A_p+A_(pr),$
unde $A_p$ este munca forțelor potențiale, $A_(pr)$ este munca forțelor nepotențiale.
La rândul său, munca forțelor potențiale este egală cu diferența de energie potențială a corpului în stările inițiale $E_(p_1)$ și finale $E_p$. Ținând cont de acest lucru, obținem o expresie pentru legea schimbarii energiei mecanice:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
unde partea stângă a egalității este modificarea energiei mecanice totale, iar partea dreaptă este opera forțelor nepotențiale.
Asa de, legea schimbarii energiei mecanice citeste:
Modificarea energiei mecanice a sistemului este egală cu munca tuturor forțelor nepotențiale.
Un sistem mecanic în care acționează numai forțe potențiale se numește conservator.
Într-un sistem conservator $A_(pr) = 0$. asta implică legea conservării energiei mecanice:
Într-un sistem conservator închis, energia mecanică totală este conservată (nu se modifică în timp):
$E_k+E_p=E_(k_1)+E_(p_1)$
Legea conservării energiei mecanice este derivată din legile mecanicii lui Newton, care sunt aplicabile unui sistem de puncte materiale (sau macroparticule).
Totuși, legea conservării energiei mecanice este valabilă și pentru un sistem de microparticule, în care legile lui Newton în sine nu se mai aplică.
Legea conservării energiei mecanice este o consecință a uniformității timpului.
Uniformitatea timpului este că, în aceleași condiții inițiale, apariția proceselor fizice nu depinde de momentul în care aceste condiții sunt create.
Legea conservării energiei mecanice totale înseamnă că atunci când energia cinetică într-un sistem conservator se modifică, energia sa potențială trebuie să se modifice, astfel încât suma lor să rămână constantă. Aceasta înseamnă posibilitatea de a converti un tip de energie în altul.
În conformitate cu diferitele forme de mișcare a materiei, se consideră diferite tipuri de energie: mecanică, internă (egală cu suma energiei cinetice a mișcării haotice a moleculelor în raport cu centrul de masă al corpului și energia potențială a interacțiunea moleculelor între ele), electromagnetice, chimice (care constă din energia cinetică a mișcării electronilor și electrică energia interacțiunii lor între ele și cu nucleele atomice), nucleare etc. Din cele de mai sus reiese clar că împărțirea energiei în diferite tipuri este destul de arbitrară.
Fenomenele naturale sunt de obicei însoțite de transformarea unui tip de energie în altul. De exemplu, frecarea unor părți ale diferitelor mecanisme duce la conversia energiei mecanice în căldură, de exemplu. energie interna.În motoarele termice, dimpotrivă, energia internă este transformată în energie mecanică; în celulele galvanice, energia chimică este transformată în energie electrică etc.
În prezent, conceptul de energie este unul dintre conceptele de bază ale fizicii. Acest concept este indisolubil legat de ideea transformării unei forme de mișcare în alta.
Acesta este modul în care conceptul de energie este formulat în fizica modernă:
Energia este o măsură cantitativă generală a mișcării și interacțiunii tuturor tipurilor de materie. Energia nu apare din nimic și nu dispare, ea se poate muta doar dintr-o formă în alta. Conceptul de energie leagă împreună toate fenomenele naturale.
Mecanisme simple. Eficiența mecanismului
Mecanismele simple sunt dispozitive care schimbă mărimea sau direcția forțelor aplicate unui corp.
Sunt folosite pentru a muta sau ridica încărcături mari cu puțin efort. Acestea includ pârghia și varietățile sale - blocuri (mobile și fixe), porți, plan înclinat și varietățile sale - pană, șurub etc.
Maneta. Regula de pârghie
O pârghie este un corp rigid capabil să se rotească în jurul unui suport fix.

Regula efectului de pârghie spune:
O pârghie este în echilibru dacă forțele aplicate acesteia sunt invers proporționale cu brațele lor:
$(F_2)/(F_1)=(l_1)/(l_2)$
Din formula $(F_2)/(F_1)=(l_1)/(l_2)$, aplicându-i proprietatea proporției (produsul termenilor extremi ai unei proporții este egal cu produsul termenilor ei medii), se poate obține următoarea formulă:
Dar $F_1l_1=M_1$ este momentul forței care tinde să rotească maneta în sensul acelor de ceasornic, iar $F_2l_2=M_2$ este momentul forței care încearcă să rotească maneta în sens invers acelor de ceasornic. Astfel, $M_1=M_2$, care este ceea ce trebuia dovedit.
Pârghia a început să fie folosită de oameni în cele mai vechi timpuri. Cu ajutorul acestuia, a fost posibilă ridicarea plăcilor grele de piatră în timpul construcției piramidelor în Egiptul Antic. Fără pârghie, acest lucru nu ar fi posibil. La urma urmei, de exemplu, pentru construcția piramidei Cheops, care are o înălțime de 147$ m, s-au folosit peste două milioane de blocuri de piatră, dintre care cel mai mic cântărea 2,5$ tone!
În zilele noastre, pârghiile sunt utilizate pe scară largă atât în producție (de exemplu, macarale), cât și în viața de zi cu zi (foarfece, tăietori de sârmă, cântare).
Bloc fix
Acțiunea unui bloc fix este similară cu acțiunea unei pârghii cu brațe egale: $l_1=l_2=r$. Forța aplicată $F_1$ este egală cu sarcina $F_2$, iar condiția de echilibru este:
Bloc fix folosit atunci când trebuie să schimbați direcția unei forțe fără a-i modifica magnitudinea.
Bloc mobil
Blocul mobil acționează similar unei pârghii ale cărei brațe sunt: $l_2=(l_1)/(2)=r$. În acest caz, starea de echilibru are forma:
unde $F_1$ este forța aplicată, $F_2$ este sarcina. Utilizarea unui bloc în mișcare oferă un câștig dublu în forță.
Palan cu scripete (sistem bloc)

Un palan convențional cu lanț este format din $n$ blocuri mobile și $n$ blocuri fixe. Folosirea acestuia oferă un câștig în putere de $2n$ ori:
$F_1=(F_2)/(2n)$
Palan cu lanț electric constă din n bloc mobil și un bloc fix. Utilizarea unui scripete de putere oferă un câștig în putere de $2^n$ ori:
$F_1=(F_2)/(2^n)$

Şurub
Un șurub este un plan înclinat înfășurat în jurul unei axe.
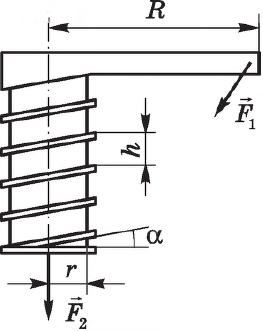
Condiția de echilibru pentru forțele care acționează asupra elicei are forma:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

unde $F_1$ este forța externă aplicată elicei și care acționează la o distanță $R$ de axa acesteia; $F_2$ este forța care acționează în direcția axei elicei; $h$ — pasul elicei; $r$ este raza medie a firului; $α$ este unghiul de înclinare al firului. $R$ este lungimea pârghiei (cheii) care rotește șurubul cu o forță de $F_1$.
Eficienţă
Coeficientul de eficiență (eficiență) este raportul dintre munca utilă și toată munca cheltuită.
Eficiența este adesea exprimată ca procent și este notă cu litera greacă $η$ („aceasta”):
$η=(A_p)/(A_3)·100%$
unde $A_n$ este munca utilă, $A_3$ este toată munca cheltuită.
Munca utilă constituie întotdeauna doar o parte din munca totală pe care o cheltuiește o persoană folosind unul sau altul mecanism.
O parte din munca depusă este cheltuită pentru depășirea forțelor de frecare. Deoarece $A_3 > A_n$, eficiența este întotdeauna mai mică de $1$ (sau $< 100%$).
Deoarece fiecare dintre lucrările din această egalitate poate fi exprimată ca produs al forței corespunzătoare și al distanței parcurse, ea poate fi rescrisă după cum urmează: $F_1s_1≈F_2s_2$.
Rezultă că, câștigând cu ajutorul unui mecanism în forță, pierdem de același număr de ori pe parcurs și invers. Această lege se numește regula de aur a mecanicii.
Regula de aur a mecanicii este o lege aproximativă, deoarece nu ia în considerare munca de depășire a frecării și gravitației pieselor dispozitivelor utilizate. Cu toate acestea, poate fi foarte util în analiza funcționării oricărui mecanism simplu.

Deci, de exemplu, datorită acestei reguli, putem spune imediat că muncitorul prezentat în figură, cu un câștig dublu în forța de ridicare a sarcinii cu $10$ cm, va trebui să coboare capătul opus al pârghiei cu $20. $ cm.
Ciocnirea corpurilor. Impacturi elastice și inelastice
Legile conservării impulsului și energiei mecanice sunt folosite pentru a rezolva problema mișcării corpurilor după o coliziune: din impulsurile și energiile cunoscute înainte de coliziune se determină valorile acestor cantități după ciocnire. Să luăm în considerare cazurile de impact elastic și inelastic.
Un impact se numește absolut inelastic, după care corpurile formează un singur corp care se mișcă cu o anumită viteză. Problema vitezei acestuia din urmă se rezolvă folosind legea conservării impulsului a unui sistem de corpuri cu mase $m_1$ și $m_2$ (dacă vorbim de două corpuri) înainte și după impact:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Este evident că energia cinetică a corpurilor în timpul unui impact inelastic nu este conservată (de exemplu, pentru $(υ_1)↖(→)=-(υ_2)↖(→)$ și $m_1=m_2$ devine egală cu zero după impact).
Un impact în care nu se păstrează doar suma impulsurilor, ci și suma energiilor cinetice ale corpurilor de impact se numește absolut elastic.
Pentru un impact absolut elastic sunt valabile următoarele ecuații:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2) )^2)/(2)$
unde $m_1, m_2$ sunt masele bilelor, $υ_1, υ_2$ sunt vitezele bilelor înainte de impact, $υ"_1, υ"_2$ sunt vitezele bilelor după impact.
După ce am studiat legile lui Newton, vedem că cu ajutorul lor este posibil să rezolvăm problemele de bază ale mecanicii dacă cunoaștem toate forțele care acționează asupra corpului. Există situații în care este dificil sau chiar imposibil să se determine aceste valori. Să luăm în considerare mai multe astfel de situații.Când două bile de biliard sau mașini se ciocnesc, putem afirma despre forțele care lucrează că aceasta este natura lor; forțele elastice acționează aici. Cu toate acestea, nu vom putea determina cu exactitate nici modulele, nici direcțiile acestora, mai ales că aceste forțe au o durată de acțiune extrem de scurtă.Odată cu mișcarea rachetelor și a avioanelor cu reacție, putem spune puțin despre forțele care pun aceste corpuri în mișcare.În astfel de cazuri, se folosesc metode care permit evitarea rezolvării ecuațiilor de mișcare și utilizarea imediată a consecințelor acestor ecuații. În acest caz, sunt introduse noi mărimi fizice. Să luăm în considerare una dintre aceste mărimi, numită impulsul corpului
O săgeată trasă dintr-un arc. Cu cât contactul coardei cu săgeata continuă (∆t), cu atât este mai mare modificarea impulsului săgeții (∆) și, prin urmare, cu atât viteza sa finală este mai mare.
Două bile care se ciocnesc. În timp ce bilele sunt în contact, ele acționează unele asupra altora cu forțe egale ca mărime, așa cum ne învață a treia lege a lui Newton. Aceasta înseamnă că modificările momentului lor trebuie să fie, de asemenea, egale ca mărime, chiar dacă masele bilelor nu sunt egale.
După analizarea formulelor, se pot trage două concluzii importante:
1. Forțe identice care acționează pentru aceeași perioadă de timp provoacă aceleași modificări ale impulsului în corpuri diferite, indiferent de masa acestora din urmă.
2. Aceeași modificare a impulsului unui corp poate fi realizată fie acționând cu o forță mică pe o perioadă lungă de timp, fie acționând pe scurt cu o forță mare asupra aceluiași corp.
Conform celei de-a doua legi a lui Newton, putem scrie:
∆t = ∆ = ∆ / ∆t
Raportul dintre modificarea impulsului unui corp și perioada de timp în care a avut loc această schimbare este egal cu suma forțelor care acționează asupra corpului.
După ce am analizat această ecuație, vedem că a doua lege a lui Newton ne permite să extindem clasa de probleme de rezolvat și să includem probleme în care masa corpurilor se modifică în timp.
Dacă încercăm să rezolvăm probleme cu masa variabilă a corpurilor folosind formularea obișnuită a celei de-a doua legi a lui Newton:
atunci încercarea unei astfel de soluții ar duce la o eroare.
Un exemplu în acest sens este avionul cu reacție sau racheta spațială deja menționată, care ard combustibil în timpul mișcării, iar produsele acestei arderi sunt eliberate în spațiul înconjurător. Desigur, masa unei aeronave sau rachete scade pe măsură ce se consumă combustibil.
În ciuda faptului că a doua lege a lui Newton sub forma „forța rezultantă este egală cu produsul dintre masa unui corp și accelerația sa” ne permite să rezolvăm o clasă destul de largă de probleme, există cazuri de mișcare a corpurilor care nu pot fi complet descris de această ecuație. În astfel de cazuri, este necesar să se aplice o altă formulare a celei de-a doua legi, conectând modificarea impulsului corpului cu impulsul forței rezultante. În plus, există o serie de probleme în care rezolvarea ecuațiilor de mișcare este matematic extrem de dificilă sau chiar imposibilă. În astfel de cazuri, ne este util să folosim conceptul de impuls.
Folosind legea conservării impulsului și relația dintre impulsul unei forțe și impulsul unui corp, putem deriva a doua și a treia lege a lui Newton.
A doua lege a lui Newton este derivată din relația dintre impulsul unei forțe și impulsul unui corp.
Impulsul de forță este egal cu modificarea impulsului corpului:

După efectuarea transferurilor corespunzătoare, obținem dependența forței de accelerație, deoarece accelerația este definită ca raportul dintre modificarea vitezei și timpul în care a avut loc această schimbare:

Înlocuind valorile în formula noastră, obținem formula pentru a doua lege a lui Newton:
![]()
Pentru a deriva a treia lege a lui Newton, avem nevoie de legea conservării impulsului.
Vectorii subliniază natura vectorială a vitezei, adică faptul că viteza se poate schimba în direcție. După transformări obținem:

Deoarece perioada de timp într-un sistem închis a fost o valoare constantă pentru ambele corpuri, putem scrie:

Am obținut a treia lege a lui Newton: două corpuri interacționează între ele cu forțe egale ca mărime și opuse ca direcție. Vectorii acestor forțe sunt îndreptați unul spre celălalt, respectiv modulele acestor forțe sunt egale ca valoare.
Bibliografie
- Tikhomirova S.A., Yavorsky B.M. Fizica (nivel de bază) - M.: Mnemosyne, 2012.
- Gendenshtein L.E., Dick Yu.I. Fizica clasa a X-a. - M.: Mnemosyne, 2014.
- Kikoin I.K., Kikoin A.K. Fizica - 9, Moscova, Educație, 1990.
Teme pentru acasă
- Definiți impulsul unui corp, impulsul forței.
- Cum este legată impulsul unui corp de impulsul forței?
- Ce concluzii se pot trage din formulele pentru impulsul corporal și impulsul de forță?
- Portalul de internet Questions-physics.ru ().
- Portalul de internet Frutmrut.ru ().
- Portalul de internet Fizmat.by ().
Legile lui Newton fac posibilă rezolvarea diferitelor probleme practic importante privind interacțiunea și mișcarea corpurilor. Un număr mare de astfel de probleme sunt asociate, de exemplu, cu găsirea accelerației unui corp în mișcare dacă toate forțele care acționează asupra acestui corp sunt cunoscute. Și apoi alte mărimi (viteza instantanee, deplasarea etc.) sunt determinate de accelerație.
Dar este adesea foarte dificil să se determine forțele care acționează asupra corpului. Prin urmare, pentru a rezolva multe probleme, se folosește o altă cantitate fizică importantă - impulsul corpului.
- Momentul unui corp p este o mărime fizică vectorială egală cu produsul dintre masa corpului și viteza acestuia
Momentul este o mărime vectorială. Direcția vectorului de impuls al corpului coincide întotdeauna cu direcția vectorului viteză de mișcare.
Unitatea SI a impulsului este impulsul unui corp cu o greutate de 1 kg care se deplasează cu o viteză de 1 m/s. Aceasta înseamnă că unitatea SI a impulsului unui corp este de 1 kg m/s.
Când faceți calcule, utilizați ecuația pentru proiecțiile vectorilor: р x = mv x.
În funcție de direcția vectorului viteză în raport cu axa X selectată, proiecția vectorului impuls poate fi fie pozitivă, fie negativă.
Cuvântul „impuls” (impulsus) tradus din latină înseamnă „împinge”. Unele cărți folosesc termenul „impuls” în loc de termenul „impuls”.
Această cantitate a fost introdusă în știință aproximativ în aceeași perioadă de timp când Newton a descoperit legile care au fost ulterior numite după el (adică la sfârșitul secolului al XVII-lea).
Când corpurile interacționează, impulsurile lor se pot schimba. Acest lucru poate fi verificat printr-o simplă experiență.
Două bile de masă egală sunt suspendate pe bucle de fir de pe o riglă de lemn montată pe un inel de trepied, așa cum se arată în Figura 44, a.
Orez. 44. Demonstrarea legii conservării impulsului
Bila 2 este deviată de la verticală printr-un unghi a (Fig. 44, b) și eliberată. Revenind la poziția anterioară, lovește mingea 1 și se oprește. În acest caz, bila 1 începe să se miște și deviază cu același unghi a (Fig. 44, c).
În acest caz, este evident că, ca urmare a interacțiunii bile, impulsul fiecăreia dintre ele s-a schimbat: cu cât a scăzut impulsul mingii 2, impulsul mingii 1 a crescut cu aceeași cantitate.
Dacă două sau mai multe corpuri interacționează doar între ele (adică nu sunt expuse forțelor externe), atunci aceste corpuri formează un sistem închis.
Momentul fiecăruia dintre corpurile incluse într-un sistem închis se poate schimba ca urmare a interacțiunii lor între ele. Dar
- suma vectorială a impulsurilor corpurilor care alcătuiesc un sistem închis nu se modifică în timp pentru nicio mișcare și interacțiune a acestor corpuri
Aceasta este legea conservării impulsului.
Legea conservării impulsului este de asemenea îndeplinită dacă corpurile sistemului sunt acționate de forțe externe a căror sumă vectorială este egală cu zero. Să arătăm acest lucru utilizând a doua și a treia lege a lui Newton pentru a deriva legea conservării impulsului. Pentru simplitate, să considerăm un sistem format din doar două corpuri - bile de mase m 1 și m 2, care se deplasează rectiliniu unele spre altele cu viteze v 1 și v 2 (Fig. 45).

Orez. 45. Un sistem de două corpuri - bile care se deplasează în linie dreaptă una spre alta
Forțele gravitaționale care acționează asupra fiecărei bile sunt echilibrate de forțele elastice ale suprafeței pe care se rostogolesc. Aceasta înseamnă că acțiunea acestor forțe poate fi ignorată. Forțele de rezistență la mișcare în acest caz sunt mici, așa că nici influența lor nu le vom ține cont. Astfel, putem presupune că bilele interacționează doar între ele.
Din figura 45 se poate observa că după un timp bilele se vor ciocni. În timpul unei coliziuni care durează o perioadă foarte scurtă de timp t, vor apărea forțe de interacțiune F1 și F2, aplicate, respectiv, primei și a doua bile. Ca urmare a acțiunii forțelor, viteza bilelor se va modifica. Să notăm vitezele bilelor după ciocnire cu literele v 1 și v 2 .
În conformitate cu a treia lege a lui Newton, forțele de interacțiune dintre bile sunt egale ca mărime și direcționate în direcții opuse:
Conform celei de-a doua legi a lui Newton, fiecare dintre aceste forțe poate fi înlocuită cu produsul dintre masa și accelerația primită de fiecare dintre bile în timpul interacțiunii:
m 1 a 1 = -m 2 a 2 .
Accelerațiile, după cum știți, sunt determinate din egalități:

Înlocuind forțele de accelerație din ecuație cu expresiile corespunzătoare, obținem:
![]()
Ca rezultat al reducerii ambelor părți ale egalității cu t, obținem:
m1(v" 1 - v 1) = -m 2 (v" 2 - v 2).
Să grupăm termenii acestei ecuații după cum urmează:
m 1 v 1 " + m 2 v 2 " = m 1 v 1 = m 2 v 2 . (1)
Avand in vedere ca mv = p, scriem ecuatia (1) sub aceasta forma:
P" 1 + P" 2 = P 1 + P 2.(2)
Partea stângă a ecuațiilor (1) și (2) reprezintă impulsul total al bilelor după interacțiunea lor, iar părțile drepte reprezintă impulsul total înainte de interacțiune.
Aceasta înseamnă că, în ciuda faptului că impulsul fiecăreia dintre bile s-a schimbat în timpul interacțiunii, suma vectorială a impulsului lor după interacțiune a rămas aceeași ca înainte de interacțiune.
Ecuațiile (1) și (2) sunt o reprezentare matematică a legii conservării impulsului.
Deoarece acest curs ia în considerare doar interacțiunile corpurilor care se mișcă de-a lungul unei linii drepte, pentru a scrie legea conservării momentului în formă scalară, este suficientă o ecuație, care include proiecții de mărimi vectoriale pe axa X:
m 1 v" 1x + m 2 v" 2x = m 1 v 1x + m 2 v 2x.
Întrebări
- Care este impulsul unui corp?
- Ce se poate spune despre direcțiile vectorilor de impuls și viteza unui corp în mișcare?
- Spuneți-ne despre cursul experimentului prezentat în Figura 44. Ce indică?
- Ce înseamnă să spui că mai multe corpuri formează un sistem închis?
- Formulați legea conservării impulsului.
- Pentru un sistem închis format din două corpuri, scrieți legea conservării impulsului sub forma unei ecuații care să includă masele și vitezele acestor corpuri. Explicați ce înseamnă fiecare simbol din această ecuație.
Exercițiul 20
- Două mașini de jucărie cu vânt, fiecare cântărind 0,2 kg, se deplasează în linie dreaptă una spre alta. Viteza fiecărei mașini față de sol este de 0,1 m/s. Sunt vectorii de impuls ai mașinilor egali? module de vector de impuls? Determinați proiecția impulsului fiecăruia dintre mașini pe axa X, paralel cu traiectoria lor.
- Cât de mult se va schimba impulsul unei mașini cu o greutate de 1 tonă (în valoare absolută) atunci când viteza sa se schimbă de la 54 la 72 km/h?
- Un bărbat stă într-o barcă odihnindu-se pe suprafața unui lac. La un moment dat se ridică și merge de la pupa la prova. Ce se va întâmpla cu barca? Explicați fenomenul pe baza legii conservării impulsului.
- Un vagon de cale ferată cu o greutate de 35 de tone se apropie de un vagon staționar de 28 de tone care stă pe aceeași cale și se cuplează automat cu acesta. După cuplare, mașinile se deplasează drept cu o viteză de 0,5 m/s. Care era viteza mașinii de 35 de tone înainte de cuplare?
