USE კოდიფიკატორის თემები:სხეულის იმპულსი, სხეულთა სისტემის იმპულსი, იმპულსის შენარჩუნების კანონი.
პულსისხეული არის ვექტორული სიდიდე, რომელიც ტოლია სხეულის მასისა და მისი სიჩქარის ნამრავლის:
არ არსებობს სპეციალური დანადგარები იმპულსის გასაზომად. იმპულსის განზომილება უბრალოდ არის მასის განზომილების პროდუქტი და სიჩქარის განზომილება:
რატომ არის საინტერესო იმპულსის კონცეფცია? გამოდის, რომ ის შეიძლება გამოყენებულ იქნას ნიუტონის მეორე კანონისთვის ოდნავ განსხვავებული, ასევე უკიდურესად სასარგებლო ფორმის მისაცემად.
ნიუტონის მეორე კანონი იმპულსური ფორმით
მოდით იყოს მასის სხეულზე მიმართული ძალების შედეგი. ჩვენ ვიწყებთ ნიუტონის მეორე კანონის ჩვეულებრივი ნოტაციით:
იმის გათვალისწინებით, რომ სხეულის აჩქარება უდრის სიჩქარის ვექტორის წარმოებულს, ნიუტონის მეორე კანონი გადაიწერება შემდეგნაირად:
ჩვენ შემოგვაქვს მუდმივი წარმოებულის ნიშნის ქვეშ:
როგორც ხედავთ, იმპულსის წარმოებული მიიღება მარცხენა მხარეს:
. ( 1 )
მიმართება (1) ნიუტონის მეორე კანონის ახალი ფორმაა.
ნიუტონის მეორე კანონი იმპულსური ფორმით. სხეულის იმპულსის წარმოებული არის სხეულზე მიმართული ძალების შედეგი.
ასევე შეგვიძლია ვთქვათ: სხეულზე მოქმედი ძალა უდრის სხეულის იმპულსის ცვლილების სიჩქარეს.
წარმოებული ფორმულაში (1) შეიძლება შეიცვალოს საბოლოო ნამატების თანაფარდობით:
. ( 2 )
ამ შემთხვევაში, საშუალო ძალა მოქმედებს სხეულზე დროის ინტერვალის განმავლობაში. რაც უფრო მცირეა მნიშვნელობა, მით უფრო ახლოს არის მიმართება წარმოებულთან და მით უფრო უახლოვდება საშუალო ძალა მის მყისიერ მნიშვნელობას მოცემულ დროს.
დავალებებში, როგორც წესი, დროის ინტერვალი საკმაოდ მცირეა. მაგალითად, ეს შეიძლება იყოს ბურთის კედელთან ზემოქმედების დრო, შემდეგ კი - დარტყმის დროს ბურთზე კედლის მხრიდან მოქმედი საშუალო ძალა.
( 2 ) მიმართების მარცხენა მხარეს ვექტორს ეწოდება იმპულსის ცვლილებადროს. იმპულსის ცვლილება არის სხვაობა იმპულსის საბოლოო და საწყის ვექტორებს შორის. კერძოდ, თუ არის სხეულის იმპულსი დროის რომელიმე საწყის მომენტში, არის სხეულის იმპულსი გარკვეული პერიოდის შემდეგ, მაშინ იმპულსის ცვლილება არის განსხვავება:
კიდევ ერთხელ ხაზს ვუსვამთ, რომ იმპულსის ცვლილება არის ვექტორების განსხვავება (ნახ. 1):
მაგალითად, ბურთი დაფრინავს კედელზე პერპენდიკულურად (დარტყმის წინ იმპულსი არის ) და უკან ბრუნდება სიჩქარის დაკარგვის გარეშე (დარტყმის შემდეგ იმპულსი არის ). იმისდა მიუხედავად, რომ მოდულის იმპულსი არ შეცვლილა (), შეინიშნება იმპულსის ცვლილება:
გეომეტრიულად, ეს სიტუაცია ნაჩვენებია ნახ. 2:
იმპულსის ცვლილების მოდული, როგორც ვხედავთ, ორჯერ უდრის ბურთის საწყისი იმპულსის მოდულს: .
მოდით გადავიწეროთ ფორმულა (2) შემდეგნაირად:
, ( 3 )
ან დაწერეთ იმპულსის ცვლილება, როგორც ზემოთ:
მნიშვნელობა ეწოდება ძალის იმპულსი.არ არსებობს სპეციალური საზომი ერთეული ძალის იმპულსისთვის; ძალის იმპულსის განზომილება უბრალოდ ძალისა და დროის განზომილებების პროდუქტია:
(გაითვალისწინეთ, რომ აღმოჩნდება სხეულის იმპულსის გაზომვის კიდევ ერთი შესაძლო ერთეული.)
თანასწორობის სიტყვიერი ფორმულირება ( 3 ) ასეთია: სხეულის იმპულსის ცვლილება უდრის სხეულზე მოცემული პერიოდის განმავლობაში მოქმედი ძალის იმპულსს.ეს, რა თქმა უნდა, ისევ ნიუტონის მეორე კანონია იმპულსური ფორმით.
ძალის გაანგარიშების მაგალითი
ნიუტონის მეორე კანონის იმპულსური ფორმით გამოყენების მაგალითად განვიხილოთ შემდეგი პრობლემა.
დავალება.
r მასის ბურთი, რომელიც ჰორიზონტალურად დაფრინავს მ/წმ სიჩქარით, ურტყამს გლუვ ვერტიკალურ კედელს და ბრუნდება მისგან სიჩქარის დაკარგვის გარეშე. ბურთის დაცემის კუთხე (ანუ კუთხე ბურთის მიმართულებასა და კედელზე პერპენდიკულარულს შორის) არის . დარტყმა გრძელდება ს. იპოვეთ საშუალო სიძლიერე
ზემოქმედების დროს ბურთზე მოქმედება.
გადაწყვეტილება.უპირველეს ყოვლისა, ჩვენ ვაჩვენებთ, რომ არეკვლის კუთხე ტოლია დაცემის კუთხის, ანუ ბურთი იმავე კუთხით გადმოხტება კედლიდან (ნახ. 3).
(3)-ის მიხედვით გვაქვს: . აქედან გამომდინარეობს, რომ იმპულსის ცვლილების ვექტორი თანარეჟისორივექტორით, ანუ მიმართულია კედელზე პერპენდიკულარულად ბურთის მობრუნებისკენ (ნახ. 5).
 |
| ბრინჯი. 5. დავალებისკენ |
ვექტორები და
ტოლია მოდულით
(რადგან ბურთის სიჩქარე არ შეცვლილა). მაშასადამე, სამკუთხედი, რომელიც შედგება ვექტორებისგან და , არის ტოლფერდა. ეს ნიშნავს, რომ კუთხე ვექტორებს შორის და უდრის , ანუ არეკვლის კუთხე მართლაც ტოლია დაცემის კუთხის.
ახლა დამატებით გაითვალისწინეთ, რომ ჩვენს ტოლფერდა სამკუთხედს აქვს კუთხე (ეს არის დაცემის კუთხე); ასე რომ, ეს სამკუთხედი ტოლგვერდაა. აქედან:
და შემდეგ ბურთზე მოქმედი სასურველი საშუალო ძალა:
სხეულის სისტემის იმპულსი
დავიწყოთ ორსხეულიანი სისტემის მარტივი სიტუაციით. კერძოდ, იყოს სხეული 1 და სხეული 2 მომენტით და შესაბამისად. სხეულის მონაცემთა სისტემის იმპულსი არის თითოეული სხეულის იმპულსების ვექტორული ჯამი:
გამოდის, რომ სხეულთა სისტემის იმპულსისთვის არსებობს ნიუტონის მეორე კანონის მსგავსი ფორმულა (1). მოდით გამოვიტანოთ ეს ფორმულა.
ყველა სხვა ობიექტს, რომლებთანაც ურთიერთქმედებენ განხილული 1 და 2 სხეულები, ჩვენ მოვუწოდებთ გარე სხეულები.ძალებს, რომლებითაც გარე სხეულები მოქმედებენ 1 და 2 სხეულებზე, ეწოდება გარე ძალები.მოდით - მიღებული გარე ძალა, რომელიც მოქმედებს სხეულზე 1. ანალოგიურად - მიღებული გარე ძალა მოქმედებს სხეულზე 2 (ნახ. 6).
გარდა ამისა, 1 და 2 სხეულებს შეუძლიათ ურთიერთქმედება ერთმანეთთან. დაე სხეულმა 2 იმოქმედოს სხეულზე 1 ძალით. შემდეგ სხეული 1 მოქმედებს სხეულზე 2 ძალით. ნიუტონის მესამე კანონის მიხედვით ძალები და ტოლია აბსოლუტური მნიშვნელობით და საპირისპირო მიმართულებით: . ძალები და არის შინაგანი ძალა,სისტემაში მოქმედი.
მოდით დავწეროთ თითოეული სხეულისთვის 1 და 2 ნიუტონის მეორე კანონი სახით ( 1 ):
, ( 4 )
. ( 5 )
დავუმატოთ ტოლობები (4) და (5):
მიღებული ტოლობის მარცხენა მხარეს არის წარმოებულების ჯამი, რომელიც უდრის ვექტორების ჯამის წარმოებულს და . მარჯვენა მხარეს გვაქვს ნიუტონის მესამე კანონის მიხედვით:
მაგრამ - ეს არის 1 და 2 სხეულების სისტემის იმპულსი. ჩვენ ასევე აღვნიშნავთ - ეს არის სისტემაზე მოქმედი გარე ძალების შედეგი. ჩვენ ვიღებთ:
. ( 6 )
ამრიგად, სხეულთა სისტემის იმპულსის ცვლილების სიჩქარე არის სისტემაზე მიმართული გარე ძალების შედეგი.თანასწორობა (6), რომელიც ასრულებს ნიუტონის მეორე კანონის როლს სხეულთა სისტემისთვის, არის ის, რისი მიღებაც გვინდოდა.
ფორმულა (6) მიღებული იყო ორი სხეულის შემთხვევისთვის. მოდით განვაზოგადოთ ჩვენი მსჯელობა სისტემაში ორგანოების თვითნებური რაოდენობის შემთხვევაზე.
სხეულთა სისტემის იმპულსისხეულებს ეწოდება სისტემაში შემავალი ყველა სხეულის იმპულსების ვექტორული ჯამი. თუ სისტემა შედგება სხეულებისგან, მაშინ ამ სისტემის იმპულსი უდრის:
შემდეგ ყველაფერი კეთდება ზუსტად ისე, როგორც ზემოთ (მხოლოდ ტექნიკურად გამოიყურება ცოტა უფრო რთული). თუ თითოეულ სხეულს დავწერთ (4) და (5) მსგავს ტოლებს და შემდეგ დავამატებთ ყველა ამ ტოლობას, მაშინ მარცხენა მხარეს ისევ მივიღებთ სისტემის იმპულსის წარმოებულს, ხოლო მარჯვენა მხარეს მხოლოდ გარე ძალების ჯამს. რჩება (შინაგანი ძალები, წყვილებში შეკრება, ნიუტონის მესამე კანონის გამო ნულს მისცემს). შესაბამისად, თანასწორობა (6) დარჩება ძალაში ზოგად შემთხვევაში.
იმპულსის შენარჩუნების კანონი
სხეულის სისტემა ე.წ დახურულითუ გარე სხეულების მოქმედებები მოცემული სისტემის სხეულებზე ან უმნიშვნელოა ან ანაზღაურებს ერთმანეთს. ამრიგად, სხეულთა დახურული სისტემის შემთხვევაში არსებითია მხოლოდ ამ სხეულების ურთიერთქმედება ერთმანეთთან, მაგრამ არა სხვა სხეულებთან.
დახურულ სისტემაზე მიმართული გარე ძალების შედეგი ნულის ტოლია: . ამ შემთხვევაში, (6)-დან ვიღებთ:
მაგრამ თუ ვექტორის წარმოებული ქრება (ვექტორის ცვლილების სიჩქარე ნულის ტოლია), მაშინ თავად ვექტორი არ იცვლება დროთა განმავლობაში:
იმპულსის შენარჩუნების კანონი. სხეულთა დახურული სისტემის იმპულსი დროთა განმავლობაში მუდმივი რჩება ამ სისტემაში არსებული სხეულების ნებისმიერი ურთიერთქმედებისთვის.
იმპულსის შენარჩუნების კანონის უმარტივესი ამოცანები მოგვარებულია სტანდარტული სქემის მიხედვით, რომელსაც ახლა ვაჩვენებთ.
დავალება. r მასის სხეული მოძრაობს მ/წმ სიჩქარით გლუვ ჰორიზონტალურ ზედაპირზე. r მასის სხეული მისკენ მ/წმ სიჩქარით მოძრაობს. ხდება აბსოლუტურად არაელასტიური ზემოქმედება (სხეულები ერთმანეთს ეწებება). იპოვეთ სხეულების სიჩქარე დარტყმის შემდეგ.
გადაწყვეტილება.სიტუაცია ნაჩვენებია ნახ. 7. მივმართოთ ღერძი პირველი სხეულის მოძრაობის მიმართულებით.
 |
| ბრინჯი. 7. დავალებისკენ |
იმის გამო, რომ ზედაპირი გლუვია, არ არის ხახუნი. ვინაიდან ზედაპირი ჰორიზონტალურია და მოძრაობა ხდება მის გასწვრივ, სიმძიმის ძალა და საყრდენი რეაქცია აბალანსებს ერთმანეთს:
ამრიგად, ამ სხეულების სისტემაზე გამოყენებული ძალების ვექტორული ჯამი ნულის ტოლია. ეს ნიშნავს, რომ სხეულთა სისტემა დახურულია. ამრიგად, ის აკმაყოფილებს იმპულსის შენარჩუნების კანონს:
. ( 7 )
სისტემის იმპულსი ზემოქმედებამდე არის სხეულების იმპულსების ჯამი:
არაელასტიური ზემოქმედების შემდეგ მიიღება მასის ერთი სხეული, რომელიც მოძრაობს სასურველი სიჩქარით:
იმპულსის შენარჩუნების კანონიდან (7) გვაქვს:
აქედან ჩვენ ვპოულობთ სხეულის სიჩქარეს, რომელიც ჩამოყალიბდა დარტყმის შემდეგ:
მოდით გადავიდეთ ღერძზე პროგნოზებზე:
პირობით გვაქვს: მ/წ, მ/წ, ისე რომ
მინუს ნიშანი მიუთითებს, რომ წებოვანი სხეულები მოძრაობენ ღერძის საპირისპირო მიმართულებით. სამიზნე სიჩქარე: მ/წმ.
იმპულსის პროექციის კონსერვაციის კანონი
შემდეგი სიტუაციები ხშირად ხდება ამოცანებში. სხეულთა სისტემა არ არის დახურული (სისტემაზე მოქმედი გარე ძალების ვექტორული ჯამი არ არის ნულის ტოლი), მაგრამ არსებობს ასეთი ღერძი, ღერძზე გარე ძალების პროგნოზების ჯამი არის ნულიდროის ნებისმიერ მომენტში. მაშინ შეგვიძლია ვთქვათ, რომ ამ ღერძის გასწვრივ ჩვენი სხეულების სისტემა იქცევა როგორც დახურული და შენარჩუნებულია სისტემის იმპულსის პროექცია ღერძზე.
მოდით ეს უფრო მკაცრად ვაჩვენოთ. პროექტის თანასწორობა ( 6 ) ღერძზე :
თუ შედეგად მიღებული გარე ძალების პროექცია ქრება, მაშინ
ამრიგად, პროექცია არის მუდმივი:
იმპულსის პროექციის შენარჩუნების კანონი. თუ სისტემაზე მოქმედი გარე ძალების ჯამის ღერძზე პროექცია ნულის ტოლია, მაშინ სისტემის იმპულსის პროექცია დროთა განმავლობაში არ იცვლება.
მოდით შევხედოთ კონკრეტული პრობლემის მაგალითს, როგორ მუშაობს იმპულსის პროექციის შენარჩუნების კანონი.
დავალება. მასიური ბიჭი, რომელიც სრიალობს გლუვ ყინულზე, ისვრის მასობრივ ქვას ჰორიზონტის დახრილი სიჩქარით. იპოვნეთ სიჩქარე, რომლითაც ბიჭი უკან ბრუნდება სროლის შემდეგ.
გადაწყვეტილება.სიტუაცია სქემატურად არის ნაჩვენები ნახ. რვა . ბიჭი გამოსახულია მართკუთხედის სახით.
 |
| ბრინჯი. 8. დავალებისკენ |
"ბიჭი + ქვა" სისტემის იმპულსი არ არის დაცული. ეს ჩანს სულ მცირე იქიდან, რომ სროლის შემდეგ ჩნდება სისტემის იმპულსის ვერტიკალური კომპონენტი (კერძოდ, ქვის იმპულსის ვერტიკალური კომპონენტი), რომელიც სროლამდე არ იყო.
ამიტომ, სისტემა, რომელსაც ბიჭი და ქვა აყალიბებს, არ არის დახურული. რატომ? ფაქტია, რომ გასროლის დროს გარე ძალების ვექტორული ჯამი ნულის ტოლი არ არის. მნიშვნელობა ჯამზე დიდია და ამ სიჭარბის გამო ჩნდება სისტემის იმპულსის ზუსტად ვერტიკალური კომპონენტი.
თუმცა, გარე ძალები მოქმედებენ მხოლოდ ვერტიკალურად (ხახუნის გარეშე). ამრიგად, იმპულსის პროექცია ჰორიზონტალურ ღერძზე შენარჩუნებულია. გასროლამდე ეს პროექცია ნულის ტოლი იყო. ღერძის მიმართულება სროლის მიმართულებით (ისე, რომ ბიჭი წავიდა უარყოფითი ნახევრად ღერძის მიმართულებით), ვიღებთ.
სხეულის იმპულსი
სხეულის იმპულსი არის სიდიდე, რომელიც ტოლია სხეულის მასისა და მისი სიჩქარის ნამრავლის.
უნდა გვახსოვდეს, რომ ჩვენ ვსაუბრობთ სხეულზე, რომელიც შეიძლება წარმოდგენილი იყოს როგორც მატერიალური წერტილი. სხეულის იმპულსს ($p$) იმპულსსაც უწოდებენ. იმპულსის ცნება ფიზიკაში შემოიტანა რენე დეკარტმა (1596-1650). ტერმინი "იმპულსი" მოგვიანებით გაჩნდა (impulsus ლათინურად ნიშნავს "ბიძგს"). იმპულსი არის ვექტორული სიდიდე (სიჩქარის მსგავსად) და გამოიხატება ფორმულით:
$p↖(→)=mυ↖(→)$
იმპულსის ვექტორის მიმართულება ყოველთვის ემთხვევა სიჩქარის მიმართულებას.
იმპულსის SI ერთეული არის სხეულის იმპულსი, რომლის წონაა $1$ კგ, რომელიც მოძრაობს $1$ მ/წმ სიჩქარით, შესაბამისად, იმპულსის ერთეული არის $1$ კგ $·$ მ/წმ.
თუ $∆t$ დროის ინტერვალის განმავლობაში სხეულზე (მატერიალურ წერტილზე) მოქმედებს მუდმივი ძალა, მაშინ აჩქარებაც მუდმივი იქნება:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
სადაც $(υ_1)↖(→)$ და $(υ_2)↖(→)$ არის სხეულის საწყისი და საბოლოო სიჩქარე. ამ მნიშვნელობის ჩანაცვლებით ნიუტონის მეორე კანონის გამოხატულებით, მივიღებთ:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
ფრჩხილების გახსნით და სხეულის იმპულსისთვის გამოხატვის გამოყენებით, გვაქვს:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
აქ $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ არის იმპულსის ცვლილება დროთა განმავლობაში $∆t$. შემდეგ წინა განტოლება ხდება:
$∆p↖(→)=F↖(→)∆t$
გამოთქმა $∆p↖(→)=F↖(→)∆t$ არის ნიუტონის მეორე კანონის მათემატიკური გამოსახულება.
ძალის ნამრავლი და მისი ხანგრძლივობა ეწოდება ძალის იმპულსი. Ისე წერტილის იმპულსის ცვლილება უდრის მასზე მოქმედი ძალის იმპულსის ცვლილებას.
გამოთქმა $∆p↖(→)=F↖(→)∆t$ ეწოდება სხეულის მოძრაობის განტოლება. გასათვალისწინებელია, რომ იგივე მოქმედება - წერტილის იმპულსის ცვლილება - შეიძლება მიღებულ იქნეს მცირე ძალით დიდი ხნის განმავლობაში და დიდი ძალით მცირე დროში.
სისტემის იმპულსი ტელ. იმპულსის ცვლილების კანონი
მექანიკური სისტემის იმპულსი (იმპულსი) არის ვექტორი, რომელიც უდრის ამ სისტემის ყველა მატერიალური წერტილის იმპულსების ჯამს:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
ცვლილებისა და იმპულსის შენარჩუნების კანონები ნიუტონის მეორე და მესამე კანონების შედეგია.
განვიხილოთ სისტემა, რომელიც შედგება ორი სხეულისგან. ძალებს ($F_(12)$ და $F_(21)$ ფიგურაში, რომლებთანაც სისტემის სხეულები ურთიერთქმედებენ ერთმანეთთან, შიდა ეწოდება.
მოდით, სისტემაზე შინაგანი ძალების გარდა მოქმედებენ გარე ძალებმა $(F_1)↖(→)$ და $(F_2)↖(→)$. თითოეული სხეულისთვის შეიძლება დაიწეროს განტოლება $∆p↖(→)=F↖(→)∆t$. ამ განტოლებების მარცხენა და მარჯვენა ნაწილების მიმატებით მივიღებთ:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
ნიუტონის მესამე კანონის მიხედვით $(F_(12))↖(→)=-(F_(21))↖(→)$.
აქედან გამომდინარე,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
მარცხენა მხარეს არის სისტემის ყველა სხეულის იმპულსის ცვლილების გეომეტრიული ჯამი, რომელიც უდრის თავად სისტემის იმპულსის ცვლილებას - $(∆p_(syst))↖(→)$. ამის გათვალისწინებით. , ტოლობა $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ შეიძლება დაიწეროს:
$(∆p_(sys))↖(→)=F↖(→)∆t$
სადაც $F↖(→)$ არის სხეულზე მოქმედი ყველა გარეგანი ძალის ჯამი. მიღებული შედეგი ნიშნავს, რომ მხოლოდ გარე ძალებს შეუძლიათ შეცვალონ სისტემის იმპულსი, ხოლო სისტემის იმპულსის ცვლილება მიმართულია ისევე, როგორც მთლიანი გარე ძალა. ეს არის მექანიკური სისტემის იმპულსის ცვლილების კანონის არსი.
შინაგან ძალებს არ შეუძლიათ სისტემის მთლიანი იმპულსის შეცვლა. ისინი მხოლოდ ცვლიან სისტემის ცალკეული ორგანოების იმპულსებს.
იმპულსის შენარჩუნების კანონი
$(∆p_(syst))↖(→)=F↖(→)∆t$ განტოლებიდან გამომდინარეობს იმპულსის შენარჩუნების კანონი. თუ სისტემაზე არ მოქმედებს გარე ძალები, მაშინ $(∆p_(syst))↖(→)=F↖(→)∆t$ განტოლების მარჯვენა მხარე ქრება, რაც ნიშნავს, რომ სისტემის მთლიანი იმპულსი უცვლელი რჩება. :
$(∆p_(sys))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
სისტემას, რომელზედაც გარე ძალები არ მოქმედებს ან გარე ძალების შედეგი ნულის ტოლია, ეწოდება დახურული.
იმპულსის შენარჩუნების კანონი ამბობს:
სხეულთა დახურული სისტემის მთლიანი იმპულსი მუდმივი რჩება სისტემის სხეულების ერთმანეთთან ურთიერთქმედებისთვის.
მიღებული შედეგი მოქმედებს სისტემისთვის, რომელიც შეიცავს ორგანოების თვითნებურ რაოდენობას. თუ გარე ძალების ჯამი არ არის ნულის ტოლი, მაგრამ მათი პროგნოზების ჯამი რომელიმე მიმართულებით ნულის ტოლია, მაშინ სისტემის იმპულსის პროექცია ამ მიმართულებით არ იცვლება. ასე რომ, მაგალითად, დედამიწის ზედაპირზე სხეულთა სისტემა არ შეიძლება ჩაითვალოს დახურულად ყველა სხეულზე მოქმედი მიზიდულობის ძალის გამო, თუმცა, იმპულსების პროგნოზების ჯამი ჰორიზონტალურ მიმართულებით შეიძლება დარჩეს უცვლელი (არარსებობის შემთხვევაში ხახუნის), რადგან ამ მიმართულებით სიმძიმის ძალა არ მოქმედებს.
რეაქტიული მოძრაობა
განვიხილოთ მაგალითები, რომლებიც ადასტურებენ იმპულსის შენარჩუნების კანონის მართებულობას.
ავიღოთ საბავშვო რეზინის ბუშტი, გავბეროთ და გავუშვათ. ჩვენ დავინახავთ, რომ როდესაც ჰაერი დაიწყებს მისგან გამოსვლას ერთი მიმართულებით, თავად ბუშტი მეორე მიმართულებით გაფრინდება. ბურთის მოძრაობა რეაქტიული მოძრაობის მაგალითია. ის აიხსნება იმპულსის შენარჩუნების კანონით: სისტემის მთლიანი იმპულსი „ბურთი პლუს ჰაერი მასში“ ჰაერის გადინებამდე ნულის ტოლია; მოძრაობისას უნდა დარჩეს ნულის ტოლი; მაშასადამე, ბურთი მოძრაობს ჭავლის გადინების მიმართულების საპირისპირო მიმართულებით და ისეთი სიჩქარით, რომ მისი იმპულსი აბსოლუტური მნიშვნელობით უდრის ჰაერის ჭავლის იმპულსს.
რეაქტიული მოძრაობაეწოდება სხეულის მოძრაობას, რომელიც ხდება მაშინ, როდესაც მისი ნაწილი შორდება მისგან გარკვეული სიჩქარით. იმპულსის შენარჩუნების კანონის გამო, სხეულის მოძრაობის მიმართულება გამოყოფილი ნაწილის მოძრაობის მიმართულების საპირისპიროა.
სარაკეტო ფრენები ეფუძნება რეაქტიული ძრავის პრინციპს. თანამედროვე კოსმოსური რაკეტა ძალიან რთული თვითმფრინავია. რაკეტის მასა არის სამუშაო სითხის მასის ჯამი (ანუ ცხელი აირები, რომლებიც წარმოიქმნება საწვავის წვის შედეგად და გამოიდევნება რეაქტიული ნაკადის სახით) და საბოლოო, ან, როგორც ამბობენ, "მშრალი" მასის ჯამი. რაკეტა, რომელიც რჩება რაკეტიდან სამუშაო სითხის ამოფრქვევის შემდეგ.
როდესაც რეაქტიული გაზის ჭავლი რაკეტიდან დიდი სიჩქარით გადმოდის, თავად რაკეტა საპირისპირო მიმართულებით მიდის. იმპულსის კონსერვაციის კანონის მიხედვით, რაკეტის მიერ შეძენილი იმპულსი $m_(p)υ_p$ უნდა იყოს ტოლი გამოფრქვეული აირების $m_(გაზი) υ_(გაზი)$:
$m_(p)υ_p=m_(გაზი) υ_(გაზი)$
აქედან გამომდინარეობს, რომ რაკეტის სიჩქარე
$υ_p=((m_(გაზი))/(m_p)) υ_(გაზი)$
ამ ფორმულიდან ჩანს, რომ რაც უფრო დიდია რაკეტის სიჩქარე, მით მეტია ამოფრქვეული აირების სიჩქარე და სამუშაო სითხის (ანუ საწვავის მასის) მასის თანაფარდობა საბოლოო ("მშრალი") მიმართ. რაკეტის მასა.
ფორმულა $υ_p=((m_(გაზი))/(m_p))·υ_(გაზი)$ მიახლოებითია. არ არის გათვალისწინებული, რომ საწვავის წვისას მფრინავი რაკეტის მასა სულ უფრო მცირდება. რაკეტის სიჩქარის ზუსტი ფორმულა 1897 წელს მიიღო კ.ე.ციოლკოვსკიმ და ატარებს მის სახელს.
ძალისმიერი სამუშაო
ტერმინი „ნამუშევარი“ ფიზიკაში 1826 წელს შემოიღო ფრანგმა მეცნიერმა ჟ.პონსლეტმა. თუ ყოველდღიურ ცხოვრებაში მხოლოდ ადამიანის შრომას ეძახიან სამუშაო, მაშინ ფიზიკაში და, კერძოდ, მექანიკაში, ზოგადად მიღებულია, რომ სამუშაო ძალით ხდება. სამუშაოს ფიზიკური რაოდენობა ჩვეულებრივ აღინიშნება ასო $A$-ით.
ძალისმიერი სამუშაო- ეს არის ძალის მოქმედების საზომი, რაც დამოკიდებულია მის მოდულზე და მიმართულებაზე, ასევე ძალის გამოყენების წერტილის გადაადგილებაზე. მუდმივი ძალისა და მართკუთხა მოძრაობისთვის, სამუშაო განისაზღვრება თანასწორობით:
$A=F|∆r↖(→)|cosα$
სადაც $F$ არის სხეულზე მოქმედი ძალა, $∆r↖(→)$ არის გადაადგილება, $α$ არის კუთხე ძალასა და გადაადგილებას შორის.

ძალის მუშაობა უდრის ძალისა და გადაადგილების მოდულების ნამრავლს და მათ შორის კუთხის კოსინუსს, ანუ $F↖(→)$ და $∆r↖(→)$ ვექტორების სკალარული ნამრავლი.
სამუშაო არის სკალარული რაოდენობა. თუ $α 0$, და თუ $90°
როდესაც სხეულზე მოქმედებს რამდენიმე ძალა, მთლიანი სამუშაო (ყველა ძალის მუშაობის ჯამი) უდრის მიღებული ძალის მუშაობას.
SI მუშაობის ერთეული არის ჯოული($1$ J). $1$ J არის $1$ N ძალის მიერ შესრულებული სამუშაო ამ ძალის მიმართულებით $1$ m გზაზე. ამ ერთეულს ეწოდა ინგლისელი მეცნიერის ჯ.ჯოულის (1818-1889) სახელი: $1$ J = $1$ N $·$ მ. ხშირად გამოიყენება კილოჯოულები და მილიჯოულები: $1$ kJ $= 1000$ J, $1$ mJ $. = 0.001$ ჯ.
სიმძიმის მუშაობა
განვიხილოთ სხეული, რომელიც სრიალებს დახრილ სიბრტყეში $α$ დახრილობის კუთხით და $H$ სიმაღლით.

ჩვენ გამოვხატავთ $∆x$-ს $H$ და $α$-ით:
$∆x=(H)/(sinα)$
იმის გათვალისწინებით, რომ გრავიტაცია $F_т=mg$ ქმნის კუთხეს ($90° - α$) მოძრაობის მიმართულებით, $∆x=(H)/(sin)α$ ფორმულის გამოყენებით, ჩვენ ვიღებთ გამოხატულებას გრავიტაციის მუშაობისთვის. $A_g$:
$A_g=მგ cos(90°-α)(H)/(sinα)=მგH$
ამ ფორმულიდან ჩანს, რომ სიმძიმის მუშაობა დამოკიდებულია სიმაღლეზე და არ არის დამოკიდებული სიბრტყის დახრილობის კუთხეზე.
აქედან გამომდინარეობს, რომ:
- გრავიტაციის მუშაობა არ არის დამოკიდებული ტრაექტორიის ფორმაზე, რომლის გასწვრივაც სხეული მოძრაობს, არამედ მხოლოდ სხეულის საწყის და საბოლოო პოზიციაზე;
- როდესაც სხეული მოძრაობს დახურულ ტრაექტორიაზე, მიზიდულობის მუშაობა ნულის ტოლია, ანუ გრავიტაცია არის კონსერვატიული ძალა (ძალებს, რომლებსაც აქვთ ეს თვისება, ეწოდება კონსერვატიული).
რეაქციის ძალების მუშაობა, არის ნული, რადგან რეაქციის ძალა ($N$) მიმართულია $∆x$ გადაადგილების პერპენდიკულურად.
ხახუნის ძალის მუშაობა
ხახუნის ძალა მიმართულია $∆x$ გადაადგილების საპირისპიროდ და ქმნის კუთხეს $180°$, ამიტომ ხახუნის ძალის მოქმედება უარყოფითია:
$A_(tr)=F_(tr)∆x cos180°=-F_(tr) ∆x$
ვინაიდან $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ მაშინ
$A_(tr)=μmgHctgα$
დრეკადობის ძალის მუშაობა
დაე, $l_0$ სიგრძის გაუწელ ზამბარზე იმოქმედოს $F↖(→)$ გარე ძალამ, რომელიც გაჭიმავს მას $∆l_0=x_0$-ით. პოზიციაში $x=x_0F_(კონტროლი)=kx_0$. $F↖(→)$ ძალის შეწყვეტის შემდეგ $x_0$ წერტილში, ზამბარა შეკუმშულია $F_(კონტროლი)$ ძალის მოქმედებით.

განვსაზღვროთ დრეკადობის ძალის მოქმედება, როდესაც ზამბარის მარჯვენა ბოლოს კოორდინატი იცვლება $х_0$-დან $х$-მდე. ვინაიდან დრეკადობის ძალა ამ ზონაში იცვლება წრფივად, ჰუკის კანონში მისი საშუალო მნიშვნელობა ამ არეში შეიძლება გამოვიყენოთ:
$F_(ex.av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
შემდეგ სამუშაო (იმ ფაქტის გათვალისწინებით, რომ $(F_(exp.av.))↖(→)$ და $(∆x)↖(→)$ მიმართულებები ემთხვევა) უდრის:
$A_(exerc)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
შეიძლება ნაჩვენები იყოს, რომ ბოლო ფორმულის ფორმა არ არის დამოკიდებული $(F_(exp.av.))↖(→)$-სა და $(∆x)↖(→)$-ს შორის კუთხეზე. დრეკადობის ძალების მუშაობა დამოკიდებულია მხოლოდ ზამბარის დეფორმაციებზე საწყის და საბოლოო მდგომარეობებში.
ამრიგად, ელასტიური ძალა, ისევე როგორც გრავიტაცია, არის კონსერვატიული ძალა.
ძალის ძალა
სიმძლავრე არის ფიზიკური რაოდენობა, რომელიც იზომება სამუშაოს თანაფარდობით იმ პერიოდის განმავლობაში, რომლის დროსაც იგი წარმოიქმნება.
სხვა სიტყვებით რომ ვთქვათ, სიმძლავრე გვიჩვენებს, თუ რამდენი სამუშაოა შესრულებული დროის ერთეულზე (SI-ში, $1$ წმ).
სიმძლავრე განისაზღვრება ფორმულით:
სადაც $N$ არის სიმძლავრე, $A$ არის შესრულებული სამუშაო $∆t$-ში.
$A=F|(∆r)↖(→)|cosα$ ჩანაცვლებით $N=(A)/(∆t)$ ფორმულაში $A$-ის ნაცვლად, მივიღებთ:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
სიმძლავრე უდრის ძალისა და სიჩქარის ვექტორების მოდულების ნამრავლს და ამ ვექტორებს შორის კუთხის კოსინუსს.
სიმძლავრე SI სისტემაში იზომება ვატებში (W). ერთი ვატი ($1$ W) არის სიმძლავრე, რომლითაც $1$ J სამუშაო შესრულებულია $1$ s-ში: $1$ W $= 1$ J/s.
ამ ერთეულს დაარქვეს ინგლისელი გამომგონებლის J. Watt (Watt) პატივსაცემად, რომელმაც შექმნა პირველი ორთქლის ძრავა. თავად ჯ. ვატმა (1736-1819 წწ.) გამოიყენა სიმძლავრის სხვა ერთეული - ცხენის ძალა (ცხენის ძალა), რომელიც მან შემოიტანა ორთქლის ძრავისა და ცხენის მუშაობის შედარების მიზნით: $ 1 $ ცხ.ძ. $= 735,5$ სამ.
ტექნოლოგიაში ხშირად გამოიყენება სიმძლავრის უფრო დიდი ერთეულები - კილოვატი და მეგავატი: $1$ კვტ $= 1000$ ვტ, 1$ მეგავატი $= 1000000$ ვტ.
Კინეტიკური ენერგია. კინეტიკური ენერგიის ცვლილების კანონი
თუ სხეულს ან რამდენიმე ურთიერთმოქმედ სხეულს (სხეულების სისტემას) შეუძლია მუშაობა, მაშინ ისინი ამბობენ, რომ მათ აქვთ ენერგია.
სიტყვა „ენერგია“ (ბერძნ. energia - მოქმედება, საქმიანობა) ხშირად გამოიყენება ყოველდღიურ ცხოვრებაში. ასე, მაგალითად, ადამიანებს, რომლებსაც შეუძლიათ სწრაფად აკეთონ სამუშაო, უწოდებენ ენერგიულებს, დიდი ენერგიით.
ენერგიას, რომელსაც სხეული ფლობს მოძრაობის გამო, კინეტიკური ენერგია ეწოდება.
როგორც ზოგადად ენერგიის განმარტების შემთხვევაში, კინეტიკურ ენერგიაზეც შეგვიძლია ვთქვათ, რომ კინეტიკური ენერგია არის მოძრავი სხეულის მუშაობის უნარი.
ვიპოვოთ $m$ მასის სხეულის კინეტიკური ენერგია, რომელიც მოძრაობს $υ$ სიჩქარით. ვინაიდან კინეტიკური ენერგია არის ენერგია მოძრაობის გამო, მისთვის ნულოვანი მდგომარეობა არის მდგომარეობა, რომელშიც სხეული ისვენებს. ვიპოვეთ სამუშაო, რომელიც აუცილებელია სხეულისთვის მოცემული სიჩქარის გადასაცემად, ჩვენ ვიპოვით მის კინეტიკურ ენერგიას.
ამისათვის ჩვენ ვიანგარიშებთ $∆r↖(→)$ გადაადგილების მონაკვეთზე შესრულებულ სამუშაოს, როდესაც ძალის ვექტორების $F↖(→)$ და გადაადგილების $∆r↖(→)$ ემთხვევა ერთმანეთს. ამ შემთხვევაში, სამუშაო არის
სადაც $∆x=∆r$

წერტილის გადაადგილებისთვის $α=const$ აჩქარებით, მოძრაობის გამოხატულებას აქვს ფორმა:
$∆x=υ_1t+(at^2)/(2),$
სადაც $υ_1$ არის საწყისი სიჩქარე.
გამონათქვამის ჩანაცვლება $∆x$-ით $∆x=υ_1t+(at^2)/(2)$ განტოლებაში $A=F ∆x$ და ნიუტონის მეორე კანონის გამოყენებით $F=ma$ მივიღებთ:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
აჩქარების გამოხატვა საწყისი $υ_1$ და საბოლოო $υ_2$ სიჩქარით $a=(υ_2-υ_1)/(t)$ და ჩანაცვლება $A=ma(υ_1t+(at^2)/(2))=( mat)/ (2)(2υ_1+at)$ გვაქვს:
$A=(m(υ_2-υ_1))/(2) (2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
ახლა საწყის სიჩქარის ნულის ტოლფასი: $υ_1=0$, მივიღებთ გამონათქვამს კინეტიკური ენერგია:
$E_K=(mυ)/(2)=(p^2)/(2m)$
ამრიგად, მოძრავ სხეულს აქვს კინეტიკური ენერგია. ეს ენერგია უდრის სამუშაოს, რომელიც უნდა გაკეთდეს იმისათვის, რომ სხეულის სიჩქარე ნულიდან $υ$-მდე გაიზარდოს.
$E_K=(mυ)/(2)=(p^2)/(2m)$-დან გამომდინარეობს, რომ ძალის მოქმედება სხეულის ერთი პოზიციიდან მეორეზე გადასატანად უდრის კინეტიკური ენერგიის ცვლილებას:
$A=E_(K_2)-E_(K_1)=∆E_K$
ტოლობა $A=E_(K_2)-E_(K_1)=∆E_K$ გამოხატავს თეორემა კინეტიკური ენერგიის ცვლილების შესახებ.
სხეულის კინეტიკური ენერგიის ცვლილება(მატერიალური წერტილი) გარკვეული პერიოდის განმავლობაში უდრის სხეულზე მოქმედი ძალის მიერ ამ დროის განმავლობაში შესრულებულ სამუშაოს.
Პოტენციური ენერგია
პოტენციური ენერგია არის ენერგია, რომელიც განპირობებულია ურთიერთმოქმედი სხეულების ან იმავე სხეულის ნაწილების ურთიერთგანლაგებით.
ვინაიდან ენერგია განისაზღვრება, როგორც სხეულის მუშაობის უნარი, პოტენციური ენერგია ბუნებრივად განისაზღვრება, როგორც ძალის მუშაობა, რომელიც დამოკიდებულია მხოლოდ სხეულების ფარდობით პოზიციაზე. ეს არის გრავიტაციის სამუშაო $A=mgh_1-mgh_2=mgH$ და ელასტიურობის სამუშაო:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
სხეულის პოტენციური ენერგიადედამიწასთან ურთიერთქმედებას ეწოდება ამ სხეულის $m$ მასის ნამრავლისა და თავისუფალი ვარდნის $g$ და სხეულის $h$ სიმაღლის ნამრავლის ტოლი მნიშვნელობა დედამიწის ზედაპირზე:
ელასტიურად დეფორმირებული სხეულის პოტენციური ენერგია არის სიდიდე, რომელიც უდრის სხეულის $k$ დრეკადობის კოეფიციენტის (სიხისტის) ნამრავლის ნახევარს და დეფორმაციის კვადრატს $∆l$:
$E_p=(1)/(2)k∆l^2$
კონსერვატიული ძალების მუშაობა (სიმძიმე და ელასტიურობა), $E_p=mgh$ და $E_p=(1)/(2)k∆l^2$-ის გათვალისწინებით, გამოიხატება შემდეგნაირად:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
ეს ფორმულა საშუალებას გვაძლევს მივცეთ პოტენციური ენერგიის ზოგადი განმარტება.
სისტემის პოტენციური ენერგია არის სიდიდე, რომელიც დამოკიდებულია სხეულების პოზიციაზე, რომლის ცვლილება სისტემის საწყისი მდგომარეობიდან საბოლოო მდგომარეობაში გადასვლისას უდრის სისტემის შიდა კონსერვატიული ძალების მუშაობას. საპირისპირო ნიშნით აღებული.
მინუს ნიშანი განტოლების მარჯვენა მხარეს $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ ნიშნავს, რომ როდესაც სამუშაო კეთდება შინაგანი ძალებით ( მაგალითად, "ქვა-დედამიწის" სისტემაში გრავიტაციის მოქმედებით სხეულის მიწაზე დაცემა), სისტემის ენერგია მცირდება. სისტემაში მუშაობას და პოტენციური ენერგიის ცვლილებას ყოველთვის საპირისპირო ნიშნები აქვს.
ვინაიდან მუშაობა განსაზღვრავს მხოლოდ პოტენციური ენერგიის ცვლილებას, მხოლოდ ენერგიის ცვლილებას აქვს ფიზიკური მნიშვნელობა მექანიკაში. ამრიგად, ნულოვანი ენერგიის დონის არჩევანი თვითნებურია და განისაზღვრება მხოლოდ მოხერხებულობის გათვალისწინებით, მაგალითად, შესაბამისი განტოლებების დაწერის სიმარტივით.
მექანიკური ენერგიის ცვლილებისა და შენარჩუნების კანონი
სისტემის მთლიანი მექანიკური ენერგიამისი კინეტიკური და პოტენციური ენერგიის ჯამი ეწოდება:
იგი განისაზღვრება სხეულების პოზიციით (პოტენციური ენერგია) და მათი სიჩქარით (კინეტიკური ენერგია).
კინეტიკური ენერგიის თეორემის მიხედვით,
$E_k-E_(k_1)=A_p+A_(pr),$
სადაც $А_р$ არის პოტენციური ძალების მუშაობა, $А_(pr)$ არის არაპოტენციური ძალების მუშაობა.
თავის მხრივ, პოტენციური ძალების მუშაობა უდრის სხეულის პოტენციური ენერგიის სხვაობას საწყის $E_(p_1)$ და საბოლოო $E_p$ მდგომარეობებში. ამის გათვალისწინებით, ჩვენ ვიღებთ გამონათქვამს მექანიკური ენერგიის ცვლილების კანონი:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
სადაც ტოლობის მარცხენა მხარე არის მთლიანი მექანიკური ენერგიის ცვლილება, ხოლო მარჯვენა მხარე არის არაპოტენციური ძალების მუშაობა.
Ისე, მექანიკური ენერგიის ცვლილების კანონიკითხულობს:
სისტემის მექანიკური ენერგიის ცვლილება უდრის ყველა არაპოტენციური ძალის მუშაობას.
მექანიკურ სისტემას, რომელშიც მხოლოდ პოტენციური ძალები მოქმედებენ, კონსერვატიული ეწოდება.
კონსერვატიულ სისტემაში $A_(pr) = 0$. ეს გულისხმობს მექანიკური ენერგიის შენარჩუნების კანონი:
დახურულ კონსერვატიულ სისტემაში მთლიანი მექანიკური ენერგია შენარჩუნებულია (დროთა განმავლობაში არ იცვლება):
$E_k+E_p=E_(k_1)+E_(p_1)$
მექანიკური ენერგიის შენარჩუნების კანონი მიღებულია ნიუტონის მექანიკის კანონებიდან, რომლებიც გამოიყენება მატერიალური წერტილების (ან მაკრონაწილაკების) სისტემაზე.
თუმცა, მექანიკური ენერგიის შენარჩუნების კანონი ასევე მოქმედებს მიკრონაწილაკების სისტემაზე, სადაც თავად ნიუტონის კანონები აღარ მოქმედებს.
მექანიკური ენერგიის შენარჩუნების კანონი დროის ერთგვაროვნების შედეგია.
დროის ერთგვაროვნებაარის ის, რომ იმავე საწყის პირობებში, ფიზიკური პროცესების მიმდინარეობა არ არის დამოკიდებული ამ პირობების შექმნის მომენტზე.
მთლიანი მექანიკური ენერგიის შენარჩუნების კანონი ნიშნავს, რომ როდესაც კონსერვატიულ სისტემაში კინეტიკური ენერგია იცვლება, მისი პოტენციური ენერგიაც უნდა შეიცვალოს, რათა მათი ჯამი მუდმივი დარჩეს. ეს ნიშნავს ერთი ტიპის ენერგიის მეორეში გადაქცევის შესაძლებლობას.
მატერიის მოძრაობის სხვადასხვა ფორმის მიხედვით განიხილება ენერგიის სხვადასხვა სახეობა: მექანიკური, შინაგანი (ტოლია მოლეკულების ქაოტური მოძრაობის კინეტიკური ენერგიის ჯამის სხეულის მასის ცენტრთან და პოტენციურ ენერგიასთან მიმართებაში. მოლეკულების ურთიერთქმედება ერთმანეთთან), ელექტრომაგნიტური, ქიმიური (რომელიც შედგება ელექტრონების მოძრაობის კინეტიკური ენერგიისგან და ელექტრული, მათი ურთიერთქმედების ენერგია ერთმანეთთან და ატომურ ბირთვებთან), ბირთვული ენერგია და ა.შ. ზემოთ, რომ ენერგიის დაყოფა სხვადასხვა ტიპებად საკმაოდ თვითნებურია.
ბუნებრივ მოვლენებს, როგორც წესი, თან ახლავს ერთი ტიპის ენერგიის მეორეში გადაქცევა. ასე, მაგალითად, სხვადასხვა მექანიზმის ნაწილების ხახუნი იწვევს მექანიკური ენერგიის გადაქცევას სითბოდ, ე.ი. შინაგანი ენერგია.თერმოძრავებში, პირიქით, შიდა ენერგია გარდაიქმნება მექანიკურ ენერგიად; გალვანურ უჯრედებში ქიმიური ენერგია გარდაიქმნება ელექტრო ენერგიად და ა.შ.
ამჟამად ენერგიის ცნება ფიზიკის ერთ-ერთი ძირითადი ცნებაა. ეს კონცეფცია განუყოფლად არის დაკავშირებული მოძრაობის ერთი ფორმის მეორეში გადაქცევის იდეასთან.
აი, როგორ არის ჩამოყალიბებული ენერგიის კონცეფცია თანამედროვე ფიზიკაში:
ენერგია არის ყველა სახის მატერიის მოძრაობისა და ურთიერთქმედების ზოგადი რაოდენობრივი საზომი. ენერგია არაფრისგან არ წარმოიქმნება და არ ქრება, ის მხოლოდ ერთი ფორმიდან მეორეში გადადის. ენერგიის კონცეფცია აერთიანებს ბუნების ყველა ფენომენს.
მარტივი მექანიზმები. მექანიზმის ეფექტურობა
მარტივი მექანიზმები არის მოწყობილობები, რომლებიც ცვლის სხეულზე მიმართული ძალების სიდიდეს ან მიმართულებას.
ისინი გამოიყენება დიდი ტვირთის გადასატანად ან ასაწევად მცირე ძალისხმევით. მათ შორისაა ბერკეტი და მისი ჯიშები - ბლოკები (მოძრავი და ფიქსირებული), კარიბჭე, დახრილი თვითმფრინავი და მისი ჯიშები - სოლი, ხრახნი და ა.შ.
Ბერკეტი. ბერკეტის წესი
ბერკეტი არის ხისტი სხეული, რომელსაც შეუძლია ბრუნოს ფიქსირებული საყრდენის გარშემო.

ბერკეტის წესი ამბობს:
ბერკეტი წონასწორობაშია, თუ მასზე გამოყენებული ძალები უკუპროპორციულია მათი მკლავების მიმართ:
$(F_2)/(F_1)=(l_1)/(l_2)$
$(F_2)/(F_1)=(l_1)/(l_2)$ ფორმულიდან, მასზე პროპორციის თვისების გამოყენებით (პროპორციის უკიდურესი წევრების ნამრავლი უდრის მისი შუა წევრების ნამრავლს), ჩვენ შეგიძლიათ მიიღოთ შემდეგი ფორმულა:
მაგრამ $F_1l_1=M_1$ არის ძალის მომენტი, რომელიც ცდილობს ბერკეტის მობრუნებას საათის ისრის მიმართულებით, ხოლო $F_2l_2=M_2$ არის ძალის მომენტი, რომელიც ცდილობს ბერკეტს საათის ისრის საწინააღმდეგოდ მოტრიალდეს. ამრიგად, $M_1=M_2$, რაც დასამტკიცებელი იყო.
ბერკეტის გამოყენება ხალხმა ძველ დროში დაიწყო. მისი დახმარებით ძველ ეგვიპტეში პირამიდების აგებისას მძიმე ქვის ფილების აწევა იყო შესაძლებელი. ბერკეტების გარეშე ეს შეუძლებელი იქნებოდა. ბოლოს და ბოლოს, მაგალითად, კეოპსის პირამიდის ასაგებად, რომლის სიმაღლეა $147$ მ, გამოიყენეს ორ მილიონზე მეტი ქვის ბლოკი, რომელთაგან უმცირესი მასა $2,5$ ტონა იყო!
დღესდღეობით, ბერკეტები ფართოდ გამოიყენება როგორც წარმოებაში (მაგალითად, ამწეები), ასევე ყოველდღიურ ცხოვრებაში (მაკრატელი, მავთულის საჭრელი, სასწორი).
ფიქსირებული ბლოკი
ფიქსირებული ბლოკის მოქმედება მსგავსია ბერკეტის მოქმედების თანაბარი ბერკეტით: $l_1=l_2=r$. გამოყენებული ძალა $F_1$ უდრის დატვირთვას $F_2$ და წონასწორობის პირობაა:
ფიქსირებული ბლოკიგამოიყენება მაშინ, როდესაც საჭიროა ძალის მიმართულების შეცვლა მისი სიდიდის შეცვლის გარეშე.
მოძრავი ბლოკი
მოძრავი ბლოკი მოქმედებს ბერკეტის მსგავსად, რომლის მკლავებია: $l_2=(l_1)/(2)=r$. ამ შემთხვევაში წონასწორობის მდგომარეობას აქვს ფორმა:
სადაც $F_1$ არის გამოყენებული ძალა, $F_2$ არის დატვირთვა. მოძრავი ბლოკის გამოყენება ორჯერ იძლევა ძალას.
პოლისპასტი (ბლოკის სისტემა)
ჩვეულებრივი ჯაჭვის ამწე შედგება $n$ მოძრავი და $n$ ფიქსირებული ბლოკებისაგან. მისი გამოყენება იძლევა $2n$-ჯერ გაზრდას:
$F_1=(F_2)/(2n)$
დენის ჯაჭვის ამწეშედგება n მოძრავი და ერთი ფიქსირებული ბლოკისგან. ელექტრული ჯაჭვის ამწეების გამოყენება იძლევა $2^n$-ჯერ გაზრდის სიძლიერეს:
$F_1=(F_2)/(2^n)$

ხრახნიანი
ხრახნი არის დახრილი სიბრტყის ჭრილობა ღერძზე.

ხრახნიანზე მოქმედი ძალების ბალანსის პირობას აქვს ფორმა:
$F_1=(F_2სთ)/(2πr)=F_2tgα, F_1=(F_2სთ)/(2πR)$

სადაც $F_1$ არის გარე ძალა, რომელიც გამოიყენება ხრახნიდან და მოქმედებს მისი ღერძიდან $R$ მანძილზე; $F_2$ არის ხრახნიანი ღერძის მიმართულებით მოქმედი ძალა; $h$ - ხრახნიანი მოედანი; $r$ არის ძაფის საშუალო რადიუსი; $α$ არის ძაფის კუთხე. $R$ არის ბერკეტის (ქანჩის) სიგრძე, რომელიც ბრუნავს ხრახნს $F_1$ ძალით.
ეფექტურობა
შესრულების კოეფიციენტი (COP) - სასარგებლო სამუშაოს თანაფარდობა მთელ დახარჯულ სამუშაოსთან.
ეფექტურობა ხშირად გამოხატულია პროცენტულად და აღინიშნება ბერძნული ასო $η$ ("ეს"):
$η=(A_p)/(A_3) 100%$
სადაც $A_n$ არის სასარგებლო სამუშაო, $A_3$ არის მთელი დახარჯული სამუშაო.
სასარგებლო სამუშაო ყოველთვის მხოლოდ ნაწილია იმ მთლიანი სამუშაოსა, რომელსაც ადამიანი ხარჯავს ამა თუ იმ მექანიზმის გამოყენებით.
შესრულებული სამუშაოს ნაწილი იხარჯება ხახუნის ძალების დაძლევაზე. ვინაიდან $А_3 > А_п$, ეფექტურობა ყოველთვის არის $1$-ზე ნაკლები (ან $< 100%$).
ვინაიდან ამ განტოლებაში თითოეული ნამუშევარი შეიძლება გამოისახოს შესაბამისი ძალისა და გავლილი მანძილის ნამრავლად, ის შეიძლება გადაიწეროს შემდეგნაირად: $F_1s_1≈F_2s_2$.
აქედან გამომდინარეობს, რომ მოქმედი მექანიზმის დახმარებით მოგებით, გზაში ამდენივეჯერ ვკარგავთ და პირიქით. ამ კანონს მექანიკის ოქროს წესს უწოდებენ.
მექანიკის ოქროს წესი არის მიახლოებითი კანონი, რადგან ის არ ითვალისწინებს სამუშაოს ხახუნისა და სიმძიმის დასაძლევად გამოყენებული მოწყობილობების ნაწილების. მიუხედავად ამისა, ეს შეიძლება იყოს ძალიან სასარგებლო ნებისმიერი მარტივი მექანიზმის მუშაობის გაანალიზებისას.

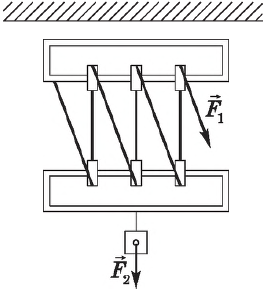
ასე რომ, მაგალითად, ამ წესის წყალობით, დაუყოვნებლივ შეგვიძლია ვთქვათ, რომ ფიგურაში ასახულ მუშაკს, აწევის ძალის ორმაგი მომატებით $10$ სმ, მოუწევს ბერკეტის საპირისპირო ბოლო 20$ სმ-ით დაწევა.
სხეულების შეჯახება. ელასტიური და არაელასტიური ზემოქმედება
იმპულსის და მექანიკური ენერგიის შენარჩუნების კანონები გამოიყენება შეჯახების შემდეგ სხეულების მოძრაობის პრობლემის გადასაჭრელად: შეჯახების შემდეგ ცნობილი მომენტები და ენერგიები გამოიყენება შეჯახების შემდეგ ამ რაოდენობების მნიშვნელობების დასადგენად. განვიხილოთ დრეკადი და არაელასტიური ზემოქმედების შემთხვევები.
აბსოლუტურად არაელასტიური ზემოქმედება ეწოდება, რის შემდეგაც სხეულები ქმნიან ერთიან სხეულს, რომელიც მოძრაობს გარკვეული სიჩქარით. ამ უკანასკნელის სიჩქარის პრობლემა მოგვარებულია იმპულსის შენარჩუნების კანონის გამოყენებით სხეულების სისტემისთვის $m_1$ და $m_2$ მასებით (თუ საუბარია ორ სხეულზე) ზემოქმედებამდე და მის შემდეგ:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
ცხადია, სხეულების კინეტიკური ენერგია არ არის დაცული არაელასტიური ზემოქმედების დროს (მაგალითად, $(υ_1)↖(→)=-(υ_2)↖(→)$-ზე და $m_1=m_2$-ზე ის ტოლი ხდება ნულის შემდეგ. გავლენა).
აბსოლუტურად ელასტიური ზემოქმედება ეწოდება, რომელშიც დაცულია არა მხოლოდ იმპულსების ჯამი, არამედ შეჯახებული სხეულების კინეტიკური ენერგიების ჯამიც.
აბსოლუტურად ელასტიური ზემოქმედებისთვის, განტოლებები
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2 )^2)/(2)$
სადაც $m_1, m_2$ არის ბურთების მასები, $υ_1, υ_2$ არის ბურთების სიჩქარე დარტყმამდე, $υ"_1, υ"_2$ არის ბურთების სიჩქარე დარტყმის შემდეგ.
სხეულის ძალის იმპულსი და იმპულსი
როგორც ნაჩვენებია, ნიუტონის მეორე კანონი შეიძლება დაიწეროს როგორც
Ft=mv-mv o=p-p o=D p.
ვექტორული სიდიდე Ft, ტოლია ძალის ნამრავლისა და მისი მოქმედების დროისა, ეწოდება ძალის იმპულსი. ვექტორული სიდიდე p=mv, რომელიც უდრის სხეულის მასისა და მისი სიჩქარის ნამრავლს, ე.წ. სხეულის იმპულსი.
SI-ში იმპულსის ერთეული არის 1 კგ მასის მქონე სხეულის იმპულსი, რომელიც მოძრაობს 1 მ/წმ სიჩქარით, ე.ი. იმპულსის ერთეული კილომეტრი წამში (1 კგ მ/წმ).
D p სხეულის იმპულსის ცვლილება t დროში უდრის Ft ძალის იმპულსს, რომელიც მოქმედებს სხეულზე ამ დროს.
იმპულსის ცნება ფიზიკის ერთ-ერთი ფუნდამენტური ცნებაა. სხეულის იმპულსი არის ერთ-ერთი სიდიდე, რომელსაც შეუძლია, გარკვეულ პირობებში, შეინარჩუნოს მისი მნიშვნელობა უცვლელად.(მაგრამ მოდული და მიმართულებით).
დახურული სისტემის მთლიანი იმპულსის კონსერვაცია
დახურული სისტემამოვუწოდებთ სხეულთა ჯგუფს, რომლებიც არ ურთიერთობენ სხვა სხეულებთან, რომლებიც არ არიან ამ ჯგუფის ნაწილი. დახურულ სისტემაში სხეულებს შორის ურთიერთქმედების ძალებს უწოდებენ შიდა. (შინაგანი ძალები ჩვეულებრივ აღინიშნება ასო ვ).
განვიხილოთ სხეულების ურთიერთქმედება დახურულ სისტემაში. მოდით, ერთი და იმავე დიამეტრის ორი ბურთი, რომელიც დამზადებულია სხვადასხვა ნივთიერებისგან (ანუ სხვადასხვა მასის მქონე), იდეალურად გლუვ ჰორიზონტალურ ზედაპირზე შემობრუნდეს და ერთმანეთს დაეჯახება. დარტყმის დროს, რომელსაც განვიხილავთ ცენტრალურ და აბსოლუტურად ელასტიურს, იცვლება ბურთების სიჩქარე და მომენტები. მიუთითეთ პირველი ბურთის მასა m 1 , მისი სიჩქარე დარტყმამდე V 1 და დარტყმის შემდეგ V 1 "; მეორე ბურთის მასა m 2 , მისი სიჩქარე დარტყმამდე v 2 , დარტყმის შემდეგ v 2 ". ნიუტონის მესამე კანონის მიხედვით, ბურთებს შორის ურთიერთქმედების ძალები ტოლია აბსოლუტური მნიშვნელობით და საპირისპირო მიმართულებით, ე.ი. f 1 \u003d -f 2.
ნიუტონის მეორე კანონის მიხედვით, ბურთების მომენტის ცვლილება მათი შეჯახების შედეგად უდრის მათ შორის ურთიერთქმედების ძალების იმპულსს, ე.ი.
m 1 v 1 "-m 1 v 1 \u003d f 1 t (3.1)
m 2 v 2 "-m 2 v 2 \u003d f 2 t (3.2)
სადაც t არის ბურთების ურთიერთქმედების დრო.
გამონათქვამების (3.1) და (3.2) ტერმინებით დამატება, ჩვენ ვხვდებით, რომ
m 1 v 1 "-m 1 v 1 + m 2 v 2" - m 2 v 2 \u003d 0.
აქედან გამომდინარე,
m 1 v 1 "+m 2 v 2" \u003d m 1 v 1 + m 2 v 2
ან სხვაგვარად
p 1 "+p 2" \u003d p 1 +p 2. (3.3)
ავღნიშნოთ p 1 "+p 2 "=p" და p 1 +p 2 =p.
სისტემაში შემავალი ყველა სხეულის იმპულსების ვექტორული ჯამი ეწოდება ამ სისტემის სრული იმპულსი. (3.3)-დან ჩანს, რომ p "= p, ანუ p" - p \u003d D p \u003d 0, შესაბამისად,
p=p 1 +p 2 = კონსტ.
ფორმულა (3.4) გამოხატავს იმპულსის შენარჩუნების კანონი დახურულ სისტემაში, რომელიც ჩამოყალიბებულია შემდეგნაირად: სხეულთა დახურული სისტემის მთლიანი იმპულსი მუდმივი რჩება ამ სისტემის სხეულების ერთმანეთთან ურთიერთქმედებისას.
სხვა სიტყვებით რომ ვთქვათ, შიდა ძალებს არ შეუძლიათ შეცვალონ სისტემის მთლიანი იმპულსი არც აბსოლუტური მნიშვნელობით და არც მიმართულებით.
ღია სისტემის მთლიანი იმპულსის ცვლილება
სხეულთა ჯგუფს, რომლებიც ურთიერთქმედებენ არა მხოლოდ ერთმანეთთან, არამედ სხეულებთან, რომლებიც არ არიან ამ ჯგუფის ნაწილი, ე.წ. ღია სისტემა. ძალებს, რომლებითაც სხეულები, რომლებიც არ შედის ამ სისტემაში, მოქმედებენ მოცემული სისტემის სხეულებზე, ეწოდება გარე ძალები (ჩვეულებრივ, გარე ძალები აღინიშნება ასო F-ით).
განვიხილოთ ორი სხეულის ურთიერთქმედება ღია სისტემაში. ამ სხეულების იმპულსების ცვლილება ხდება როგორც შინაგანი ძალების მოქმედებით, ასევე გარე ძალების მოქმედებით.
ნიუტონის მეორე კანონის მიხედვით, პირველი და მეორე სხეულებისთვის განსახილველი სხეულების მომენტის ცვლილებებია.
D p 1 \u003d f 1 t + F 1 t (3.5)
D p 2 \u003d f 2 t + F 2 t (3.6)
სადაც t არის გარე და შინაგანი ძალების მოქმედების დრო.
გამონათქვამების (3.5) და (3.6) ტერმინის მიხედვით დამატება, ჩვენ ვხვდებით, რომ
D (p 1 +p 2) = (f 1 +f 2)t +(F 1 +F 2)t (3.7)
ამ ფორმულაში, p \u003d p 1 + p 2 - სისტემის მთლიანი იმპულსი, f 1 + f 2 \u003d 0 (რადგან, ნიუტონის მესამე კანონის მიხედვით (f 1 \u003d -f 2), F 1 + F 2 \u003d F არის ყველა გარეგანი ძალის შედეგი, რომელიც მოქმედებს მოცემული სისტემის სხეულებზე, ნათქვამის გათვალისწინებით, ფორმულა (3.7) იღებს ფორმას.
Dp=Ft. (3.8)
(3.8)-დან ჩანს, რომ სისტემის მთლიანი იმპულსი იცვლება მხოლოდ გარე ძალების მოქმედებით.თუ სისტემა დახურულია, ანუ F=0, მაშინ D p=0 და, შესაბამისად, p=const. ამრიგად, ფორმულა (3.4) არის (3.8) ფორმულის განსაკუთრებული შემთხვევა, რომელიც გვიჩვენებს, თუ რა პირობებშია შენარჩუნებული სისტემის მთლიანი იმპულსი და რა პირობებში იცვლება იგი.
რეაქტიული მოძრაობა.
ციოლკოვსკის ნაშრომის მნიშვნელობა ასტრონავტიკისთვის
სხეულის მოძრაობას, რომელიც ხდება მისი მასის ნაწილის მისგან გარკვეული სიჩქარით გამოყოფის შედეგად, ე.წ. რეაქტიული.
ყველა სახის მოძრაობა, გარდა რეაქტიულისა, შეუძლებელია მოცემული სისტემის გარე ძალების არსებობის გარეშე, ანუ ამ სისტემის სხეულების გარემოსთან ურთიერთქმედების გარეშე და რეაქტიული ძრავის განსახორციელებლად, სხეულის ურთიერთქმედება გარემოსთან არ არის საჭირო.თავდაპირველად, სისტემა ისვენებს, ანუ მისი მთლიანი იმპულსი ნულის ტოლია. როდესაც მისი მასის ნაწილი იწყებს ამოგდებას სისტემიდან გარკვეული სიჩქარით, მაშინ (რადგან დახურული სისტემის მთლიანი იმპულსი, იმპულსის შენარჩუნების კანონის მიხედვით, უცვლელი უნდა დარჩეს), სისტემა იღებს მიმართულ სიჩქარეს. საპირისპირო მიმართულება. მართლაც, ვინაიდან m 1 v 1 + m 2 v 2 \u003d 0, შემდეგ m 1 v 1 \u003d -m 2 v 2, ე.ი.
v 2 \u003d -v 1 მ 1 / მ 2.
ამ ფორმულიდან გამომდინარეობს, რომ m 2 მასის მქონე სისტემის მიერ მიღებული სიჩქარე v 2 დამოკიდებულია ამოფრქვეულ მასაზე m 1 და მისი ამოფრქვევის v 1 სიჩქარეზე.
სითბოს ძრავას, რომელშიც გამოსხივებული ცხელი აირების ჭავლის რეაქციის შედეგად წარმოქმნილი ბიძგების ძალა პირდაპირ მის სხეულზე ვრცელდება, რეაქტიული ძრავა ეწოდება. სხვა მანქანებისგან განსხვავებით, თვითმფრინავით მომუშავე მოწყობილობას შეუძლია გარე სივრცეში გადაადგილება.
კოსმოსური ფრენების თეორიის ფუძემდებელია გამოჩენილი რუსი მეცნიერი ციოლკოვსკი (1857 - 1935 წწ). მან ჩამოაყალიბა რეაქტიული მოძრაობის თეორიის ზოგადი საფუძვლები, შეიმუშავა რეაქტიული თვითმფრინავის ძირითადი პრინციპები და სქემები და დაამტკიცა მრავალსაფეხურიანი რაკეტის გამოყენების აუცილებლობა პლანეტათაშორისი ფრენებისთვის. ციოლკოვსკის იდეები წარმატებით განხორციელდა სსრკ-ში დედამიწის ხელოვნური თანამგზავრებისა და კოსმოსური ხომალდების მშენებლობაში.
პრაქტიკული ასტრონავტიკის ფუძემდებელია საბჭოთა მეცნიერი აკადემიკოსი კოროლევი (1906 - 1966 წწ). მისი ხელმძღვანელობით შეიქმნა და გაუშვა მსოფლიოში პირველი ხელოვნური დედამიწის თანამგზავრი, კაცობრიობის ისტორიაში შედგა პირველი პილოტირებული ფრენა კოსმოსში. დედამიწის პირველი კოსმონავტი იყო საბჭოთა კაცი Yu.A. გაგარინი (1934 - 1968 წწ).
კითხვები თვითკონტროლისთვის:
- როგორ იწერება ნიუტონის მეორე კანონი იმპულსური ფორმით?
- რას ჰქვია ძალის იმპულსი? სხეულის იმპულსი?
- სხეულთა რომელ სისტემას ეწოდება დახურული?
- რას უწოდებენ შინაგან ძალებს?
- დახურულ სისტემაში ორი სხეულის ურთიერთქმედების მაგალითის გამოყენებით აჩვენე როგორ დგინდება იმპულსის შენარჩუნების კანონი. როგორ არის ჩამოყალიბებული?
- რა არის სისტემის მთლიანი იმპულსი?
- შეუძლია თუ არა შინაგანმა ძალებმა შეცვალონ სისტემის მთლიანი იმპულსი?
- სხეულთა რომელ სისტემას ეწოდება ღია?
- რა ძალებს უწოდებენ გარე?
- ჩამოაყალიბეთ ფორმულა, რომელიც აჩვენებს, თუ რა პირობებში იცვლება სისტემის მთლიანი იმპულსი და რა პირობებშია იგი დაცული.
- რა არის რეაქტიული მოძრაობა?
- შეიძლება ის მოხდეს მოძრავი სხეულის გარემოსთან ურთიერთქმედების გარეშე?
- რა არის რეაქტიული მოძრაობის კანონი?
- რა მნიშვნელობა აქვს ციოლკოვსკის ნაშრომს ასტრონავტიკისთვის?
თუ m მასის სხეულზე გარკვეული პერიოდის განმავლობაში Δ t მოქმედებს F → ძალა, შემდეგ მოჰყვება სხეულის სიჩქარის ცვლილება ∆ v → = v 2 → - v 1 →. ჩვენ ამას ვიღებთ Δ t დროის განმავლობაში სხეული აგრძელებს მოძრაობას აჩქარებით:
a → = ∆ v → ∆ t = v 2 → - v 1 → ∆ t.
დინამიკის ძირითადი კანონის, ანუ ნიუტონის მეორე კანონის საფუძველზე, გვაქვს:
F → = m a → = m v 2 → - v 1 → ∆ t ან F → ∆ t = m v 2 → - m v 1 → = m ∆ v → = ∆ m v →.
განმარტება 1სხეულის იმპულსი, ან მოძრაობის მოცულობაარის ფიზიკური სიდიდე, რომელიც ტოლია სხეულის მასისა და მისი მოძრაობის სიჩქარის ნამრავლისა.
სხეულის იმპულსი ითვლება ვექტორულ სიდიდედ, რომელიც იზომება კილოგრამ-მეტრში წამში (კგ მ/წმ).
განმარტება 2
ძალის იმპულსიარის ფიზიკური სიდიდე, რომელიც ტოლია ძალის ნამრავლისა და მისი მოქმედების დროისა.
იმპულსს უწოდებენ ვექტორულ სიდიდეებს. არსებობს განმარტების კიდევ ერთი ფორმულირება.
განმარტება 3
სხეულის იმპულსის ცვლილება ძალის იმპულსის ტოლია.
იმპულსით აღინიშნება p → ნიუტონის მეორე კანონი იწერება ასე:
F → ∆t = ∆p → .
ეს ფორმა საშუალებას გვაძლევს ჩამოვაყალიბოთ ნიუტონის მეორე კანონი. ძალა F → არის სხეულზე მოქმედი ყველა ძალის შედეგი. ტოლობა იწერება როგორც პროექცია ხედის კოორდინატთა ღერძებზე:
F x Δ t = Δ p x; F y ∆t = ∆p y ; Fz ∆t = ∆pz.
სურათი 1 . თექვსმეტი. ერთი . სხეულის იმპულსის მოდელი.
სხეულის იმპულსის პროექციის ცვლილება სამი ერთმანეთის პერპენდიკულარული ღერძიდან რომელიმეზე უდრის იმავე ღერძზე ძალის იმპულსის პროექციას.
განმარტება 4
ერთგანზომილებიანი მოძრაობაარის სხეულის მოძრაობა ერთ-ერთი საკოორდინატო ღერძის გასწვრივ.
მაგალითი 1
მაგალითად, განვიხილოთ სხეულის თავისუფალი ვარდნა საწყისი სიჩქარით v 0 გრავიტაციის მოქმედების დროს დროის t. როდესაც O Y ღერძის მიმართულება ვერტიკალურად ქვევითაა, სიმძიმის იმპულსი F t \u003d მგ, რომელიც მოქმედებს t დროში, უდრის მ გ ტ. ასეთი იმპულსი უდრის სხეულის იმპულსის ცვლილებას:
F t t \u003d m g t \u003d Δ p \u003d m (v - v 0), საიდანაც v \u003d v 0 + g t.
ჩანაწერი ემთხვევა თანაბრად აჩქარებული მოძრაობის სიჩქარის განსაზღვრის კინემატიკურ ფორმულას. ძალის მოდული არ იცვლება მთელი t ინტერვალიდან. როდესაც ის ცვალებადია სიდიდით, მაშინ იმპულსის ფორმულა მოითხოვს F ძალის საშუალო მნიშვნელობის p-ით ჩანაცვლებას t დროის ინტერვალიდან. სურათი 1 . თექვსმეტი. 2 გვიჩვენებს, თუ როგორ განისაზღვრება დროზე დამოკიდებული ძალის იმპულსი.

სურათი 1 . თექვსმეტი. 2. ძალის იმპულსის გამოთვლა F (t) ნაკვეთიდან
დროის ღერძზე Δ t ინტერვალის არჩევა აუცილებელია, ცხადია, რომ ძალა F(t)პრაქტიკულად უცვლელი. ძალის იმპულსი F (t) Δ t გარკვეული პერიოდის განმავლობაში Δ t ტოლი იქნება დაჩრდილული ფიგურის ფართობის. დროის ღერძის Δ t i-ზე ინტერვალებად დაყოფისას 0-დან t ინტერვალზე დაამატეთ ყველა მოქმედი ძალის იმპულსები ამ ინტერვალებიდან Δ t i , მაშინ ძალის მთლიანი იმპულსი იქნება ფორმირების ფართობის ტოლი საფეხურიანი და დროის ღერძების გამოყენებით.
ლიმიტის გამოყენებით (Δ t i → 0) შეგიძლიათ იპოვოთ ფართობი, რომელიც შეიზღუდება გრაფიკით F(t)და t ღერძი. გრაფიკიდან ძალის იმპულსის განმარტების გამოყენება გამოიყენება ნებისმიერ კანონში, სადაც იცვლება ძალები და დრო. ეს გამოსავალი იწვევს ფუნქციის ინტეგრაციას F(t)ინტერვალიდან [0; t] .
სურათი 1 . თექვსმეტი. 2 გვიჩვენებს ძალის იმპულსს, რომელიც არის t 1 = 0 s-დან t 2 = 10-მდე ინტერვალში.
ფორმულიდან ვიღებთ, რომ F c p (t 2 - t 1) \u003d 1 2 F m a x (t 2 - t 1) \u003d 100 N s \u003d 100 კგ მ / წმ.
ანუ, მაგალითი გვიჩვენებს F-ს p \u003d 1 2 F m a x \u003d 10 N-ით.
არის შემთხვევები, როდესაც საშუალო ძალის F განსაზღვრა p-ით შესაძლებელია ცნობილი დროისა და მოხსენებული იმპულსის მონაცემებით. 0,415 კგ მასის მქონე ბურთზე ძლიერი ზემოქმედებით შეიძლება დაფიქსირდეს v \u003d 30 მ/წმ სიჩქარის ტოლი. ზემოქმედების სავარაუდო დროა 8 10 – 3 წმ.
შემდეგ იმპულსის ფორმულა იღებს ფორმას:
p = m v = 12,5 კგ გ მ/წმ.
დარტყმის დროს F c p საშუალო ძალის დასადგენად აუცილებელია F c p = p ∆ t = 1,56 10 3 N.
მივიღეთ ძალიან დიდი მნიშვნელობა, რომელიც უდრის 160 კგ მასის სხეულს.
როდესაც მოძრაობა ხდება მრუდი ბილიკის გასწვრივ, მაშინ საწყისი მნიშვნელობა p 1 → და საბოლოო
p 2 → შეიძლება იყოს განსხვავებული მოდულით და მიმართულებით. იმპულსის დასადგენად ∆ p → გამოიყენეთ იმპულსის დიაგრამა, სადაც არის ვექტორები p 1 → და p 2 → , და ∆ p → = p 2 → - p 1 → აგებული პარალელოგრამის წესით.
მაგალითი 2
სურათი 1 ნაჩვენებია როგორც მაგალითი. თექვსმეტი. 2, სადაც დახატულია კედლიდან მობრუნებული ბურთის იმპულსების დიაგრამა. მიტანისას ბურთი m მასით v 1 → სიჩქარით ურტყამს ზედაპირს α ნორმასთან კუთხით და ბრუნდება v 2 → β კუთხით. კედელზე შეჯახებისას ბურთი ექვემდებარებოდა ძალა F → მიმართული ისევე, როგორც ვექტორი ∆ p → .

სურათი 1 . თექვსმეტი. 3 . ბურთის მობრუნება უხეში კედლიდან და იმპულსის დიაგრამა.
თუ ხდება m მასის ბურთის ნორმალური დაცემა დრეკად ზედაპირზე v 1 → = v → სიჩქარით, მაშინ მობრუნების დროს ის შეიცვლება v 2 → = - v →. ეს ნიშნავს, რომ გარკვეული პერიოდის განმავლობაში იმპულსი შეიცვლება და ტოლი იქნება ∆ p → = - 2 m v → . პროექციების გამოყენებით ОХ-ზე, შედეგი დაიწერება როგორც Δ p x = – 2 m v x. ნახატიდან 1 . 16 . 3 ჩანს, რომ OH ღერძი მიმართულია კედლისგან მოშორებით, შემდეგ v x< 0 и Δ p x >0 . ფორმულიდან ვიღებთ, რომ Δ p მოდული ასოცირდება სიჩქარის მოდულთან, რომელიც იღებს Δ p = 2 m v ფორმას.
თუ შეამჩნევთ შეცდომას ტექსტში, მონიშნეთ იგი და დააჭირეთ Ctrl+Enter
პულსი (მოძრაობის რაოდენობა) არის ვექტორული ფიზიკური სიდიდე, რომელიც არის სხეულის მექანიკური მოძრაობის საზომი. კლასიკურ მექანიკაში სხეულის იმპულსი უდრის მასის ნამრავლს მეს სხეული თავისი სიჩქარით ვ, იმპულსის მიმართულება ემთხვევა სიჩქარის ვექტორის მიმართულებას:
სისტემის იმპულსინაწილაკები არის მისი ცალკეული ნაწილაკების მომენტების ვექტორული ჯამი: p=(ჯამები) პი, სად პიარის i-ე ნაწილაკის იმპულსი.
თეორემა სისტემის იმპულსის ცვლილების შესახებ: სისტემის მთლიანი იმპულსი შეიძლება შეიცვალოს მხოლოდ გარე ძალების მოქმედებით: Fext=dp/dt(1), ე.ი. სისტემის იმპულსის დროითი წარმოებული უდრის სისტემის ნაწილაკებზე მოქმედი ყველა გარეგანი ძალის ვექტორული ჯამის. როგორც ერთი ნაწილაკის შემთხვევაში, გამონათქვამიდან (1) გამომდინარეობს, რომ სისტემის იმპულსის ზრდა უდრის ყველა გარე ძალების შედეგის იმპულსს დროის შესაბამისი პერიოდისთვის:
p2-p1= t & 0 F ext dt.
კლასიკურ მექანიკაში სრული იმპულსიმატერიალური წერტილების სისტემას ეწოდება ვექტორული რაოდენობა, რომელიც ტოლია მატერიალური წერტილების მასების ნამრავლების ჯამს მათი სიჩქარით:
![]()
შესაბამისად, სიდიდეს ეწოდება ერთი მატერიალური წერტილის იმპულსი. ეს არის ვექტორული სიდიდე, რომელიც მიმართულია იმავე მიმართულებით, როგორც ნაწილაკების სიჩქარე. იმპულსის ერთეული ერთეულების საერთაშორისო სისტემაში (SI) არის კილოგრამი მეტრი წამში(კგ მ/წმ).
თუ საქმე გვაქვს სასრული ზომის სხეულთან, რომელიც არ შედგება დისკრეტული მატერიალური წერტილებისგან, მისი იმპულსის დასადგენად აუცილებელია სხეულის დაშლა წვრილ ნაწილებად, რომლებიც შეიძლება ჩაითვალოს მატერიალურ წერტილებად და მათზე ჯამი, როგორც შედეგს ვიღებთ:
სისტემის იმპულსი, რომელზეც არ მოქმედებს რაიმე გარე ძალები (ან ისინი კომპენსირდება), შემონახულიდროზე:
იმპულსის კონსერვაცია ამ შემთხვევაში გამომდინარეობს ნიუტონის მეორე და მესამე კანონებიდან: ნიუტონის მეორე კანონის დაწერა სისტემის შემადგენელი თითოეული მატერიალური წერტილისთვის და მისი შეჯამება ყველა მატერიალურ წერტილზე, რომლებიც ქმნიან სისტემას, ნიუტონის მესამეს ძალით. კანონი ვიღებთ თანასწორობას (*).
რელატივისტურ მექანიკაში არაურთიერთმა მატერიალური წერტილების სისტემის სამგანზომილებიანი იმპულსი არის რაოდენობა.
 ,
,
სადაც მ ი- წონა მე- მატერიალური წერტილი.
არაურთიერთმა მატერიალური წერტილების დახურული სისტემისთვის ეს მნიშვნელობა შენარჩუნებულია. თუმცა, სამგანზომილებიანი იმპულსი არ არის რელატივისტურად უცვლელი სიდიდე, რადგან ის დამოკიდებულია მითითების სისტემაზე. უფრო მნიშვნელოვანი მნიშვნელობა იქნება ოთხგანზომილებიანი იმპულსი, რომელიც ერთი მატერიალური წერტილისთვის განისაზღვრება როგორც

პრაქტიკაში ხშირად გამოიყენება შემდეგი მიმართებები ნაწილაკების მასას, იმპულსსა და ენერგიას შორის:
პრინციპში, არაურთიერთმა მატერიალური წერტილების სისტემისთვის ჯამდება მათი 4 მომენტი. ამასთან, რელატივისტურ მექანიკაში ურთიერთქმედების ნაწილაკებისთვის მხედველობაში უნდა იქნას მიღებული არა მხოლოდ სისტემის შემადგენელი ნაწილაკების მომენტი, არამედ მათ შორის ურთიერთქმედების ველის იმპულსი. მაშასადამე, რელატივისტურ მექანიკაში ბევრად უფრო მნიშვნელოვანი სიდიდეა ენერგიის იმპულსის ტენსორი, რომელიც სრულად აკმაყოფილებს კონსერვაციის კანონებს.
პულსის თვისებები
· ადიტიურობა.ეს თვისება ნიშნავს, რომ მატერიალური წერტილებისგან შემდგარი მექანიკური სისტემის იმპულსი უდრის სისტემაში შემავალი ყველა მატერიალური წერტილის იმპულსების ჯამს.
· უცვლელობა მითითების ჩარჩოს ბრუნვის მიმართ.
· კონსერვაცია.იმპულსი არ იცვლება ურთიერთქმედების დროს, რომელიც ცვლის მხოლოდ სისტემის მექანიკურ მახასიათებლებს. ეს თვისება უცვლელია გალილეის გარდაქმნების მიმართ.კინეტიკური ენერგიის კონსერვაციის თვისებები, იმპულსის კონსერვაცია და ნიუტონის მეორე კანონი საკმარისია იმპულსის მათემატიკური ფორმულის გამოსათვლელად.
იმპულსის შენარჩუნების კანონი (იმპულსის შენარჩუნების კანონი)- სისტემის ყველა სხეულის იმპულსების ვექტორული ჯამი არის მუდმივი მნიშვნელობა, თუ სისტემაზე მოქმედი გარე ძალების ვექტორული ჯამი ნულის ტოლია.
კლასიკურ მექანიკაში, იმპულსის შენარჩუნების კანონი, როგორც წესი, მიღებულია ნიუტონის კანონების შედეგად. ნიუტონის კანონებიდან ჩანს, რომ ცარიელ სივრცეში მოძრაობისას იმპულსი დროში შენარჩუნებულია, ხოლო ურთიერთქმედების არსებობისას მისი ცვლილების სიჩქარე განისაზღვრება გამოყენებული ძალების ჯამით.
კონსერვაციის ნებისმიერი ფუნდამენტური კანონის მსგავსად, იმპულსის შენარჩუნების კანონი, ნოეთერის თეორემის მიხედვით, ასოცირდება ერთ-ერთ ფუნდამენტურ სიმეტრიასთან - სივრცის ერთგვაროვნებასთან.
სხეულის იმპულსის ცვლილება უდრის სხეულზე მოქმედი ყველა ძალის შედეგის იმპულსს.ეს არის ნიუტონის მეორე კანონის კიდევ ერთი ფორმულირება.


