Masalah apa pun yang melibatkan benda bergerak dalam mekanika klasik memerlukan pengetahuan tentang konsep momentum. Artikel ini membahas konsep tersebut, memberikan jawaban atas pertanyaan ke mana arah vektor momentum suatu benda, dan juga memberikan contoh penyelesaian masalah.
Kuantitas gerakan
Untuk mengetahui kemana arah vektor momentum suatu benda, pertama-tama Anda harus memahami arti fisisnya. Istilah ini pertama kali dijelaskan oleh Isaac Newton, namun penting untuk dicatat bahwa ilmuwan Italia Galileo Galilei telah menggunakan konsep serupa dalam karyanya. Untuk mengkarakterisasi suatu benda bergerak, ia memperkenalkan besaran yang disebut impuls, tekanan, atau impuls itu sendiri (impeto dalam bahasa Italia). Kelebihan Isaac Newton terletak pada kenyataan bahwa ia mampu menghubungkan karakteristik ini dengan gaya-gaya yang bekerja pada benda.
Jadi, pada awalnya dan lebih tepat, apa yang paling dipahami tentang impuls suatu benda disebut kuantitas gerak. Memang rumus matematika besaran yang dipertimbangkan ditulis dalam bentuk:
Di sini m adalah massa benda, v¯ adalah kecepatannya. Seperti dapat dilihat dari rumusnya, kita tidak berbicara tentang impuls apapun, yang ada hanya kecepatan benda dan massanya, yaitu besarnya gerak.
Penting untuk dicatat bahwa rumus ini tidak mengikuti bukti atau ekspresi matematis. Kemunculannya dalam fisika memiliki karakter sehari-hari yang sangat intuitif. Jadi, siapa pun tahu betul bahwa jika lalat dan truk bergerak dengan kecepatan yang sama, maka akan lebih sulit menghentikan truk tersebut, karena pergerakannya jauh lebih banyak daripada serangga.

Darimana konsep vektor momentum benda berasal dibahas di bawah ini.
Impuls gaya merupakan penyebab terjadinya perubahan momentum
Newton mampu menghubungkan karakteristik yang diperkenalkan secara intuitif dengan hukum kedua yang menyandang namanya.
Impuls gaya adalah besaran fisis yang diketahui yang sama dengan produk gaya eksternal yang diterapkan pada suatu benda tertentu dan durasi aksinya. Dengan menggunakan hukum Newton yang terkenal dan dengan asumsi bahwa gaya tidak bergantung pada waktu, kita dapat memperoleh persamaan:
F¯ * Δt = m * a¯ * Δt.
Di sini Δt adalah waktu kerja gaya F, a adalah percepatan linier yang diberikan oleh gaya F pada benda bermassa m. Seperti diketahui, mengalikan percepatan suatu benda dengan periode waktu yang dilaluinya akan menghasilkan peningkatan kecepatan. Fakta ini memungkinkan kita untuk menulis ulang rumus di atas dalam bentuk yang sedikit berbeda:
F¯ * Δt = m * Δv¯, dimana Δv¯= a¯ * Δt.
Sisi kanan persamaan mewakili perubahan momentum (lihat ekspresi di paragraf sebelumnya). Maka akan menjadi:
F¯ * Δt = Δp¯, dimana Δp¯ = m * Δv¯.
Jadi, dengan menggunakan hukum Newton dan konsep momentum, kita dapat sampai pada kesimpulan penting: pengaruh gaya luar pada suatu benda selama periode waktu tertentu menyebabkan perubahan momentumnya.

Sekarang menjadi jelas mengapa besaran gerak biasa disebut impuls, karena perubahannya bertepatan dengan impuls gaya (kata “gaya” biasanya dihilangkan).
Besaran vektor p¯

Beberapa besaran (F¯, v¯, a¯, p¯) mempunyai garis di atasnya. Artinya kita berbicara tentang karakteristik vektor. Artinya, besaran gerak, seperti halnya kecepatan, gaya, dan percepatan, selain nilai absolut (modulus), juga dijelaskan oleh arah.
Karena setiap vektor dapat didekomposisi menjadi komponen-komponen individualnya, dengan menggunakan sistem koordinat persegi panjang Cartesian, kita dapat menulis persamaan berikut:
1) p¯ = m * v¯;
2) hal x = m * vx ; p kamu = m * v kamu ; p z = m * v z ;
3) |p¯| = √(p x 2 + p y 2 + p z 2).
Di sini, ekspresi pertama adalah bentuk vektor representasi momentum, kumpulan rumus ke-2 memungkinkan Anda menghitung setiap komponen momentum p¯, dengan mengetahui komponen kecepatan yang sesuai (indeks x, y, z menunjukkan proyeksi vektor ke sumbu koordinat yang sesuai). Terakhir, rumus ke-3 memungkinkan Anda menghitung panjang vektor impuls (nilai absolut dari besaran) melalui komponen-komponennya.
Kemana arah vektor momentum benda?
Setelah memperhatikan konsep momentum p¯ dan sifat dasarnya, kita dapat dengan mudah menjawab pertanyaan yang diajukan. Vektor momentum suatu benda diarahkan dengan cara yang sama seperti vektor kecepatan linier. Memang, dari matematika diketahui bahwa mengalikan vektor a¯ dengan bilangan k akan menghasilkan pembentukan vektor baru b¯, yang memiliki sifat-sifat sebagai berikut:
- panjangnya sama dengan hasil kali bilangan dan modulus vektor asal, yaitu |b¯| = k * |a¯|;
- arahnya sama dengan vektor asal jika k > 0, jika tidak maka arahnya berlawanan dengan a¯.
Dalam hal ini, peran vektor a¯ dimainkan oleh kecepatan v¯, momentum p¯ adalah vektor baru b¯, dan bilangan k adalah massa benda m. Karena vektor momentum selalu positif (m>0), maka ketika menjawab pertanyaan: ke manakah arah vektor momentum benda p¯, dapat dikatakan bahwa vektor tersebut searah dengan kecepatan v¯.
Vektor perubahan momentum
Menarik untuk mempertimbangkan pertanyaan serupa lainnya: ke manakah vektor perubahan momentum suatu benda, yaitu Δp¯, diarahkan. Untuk menjawabnya sebaiknya gunakan rumus yang didapat di atas:
F¯ * Δt = m * Δv¯ = Δp¯.
Berdasarkan penjelasan pada paragraf sebelumnya, dapat dikatakan bahwa arah perubahan momentum Δp¯ berimpit dengan arah vektor gaya F¯ (Δt > 0) atau dengan arah vektor perubahan kecepatan Δv¯ (m > 0).
Penting untuk tidak bingung di sini karena kita berbicara secara khusus tentang perubahan kuantitas. Dalam kasus umum, vektor p¯ dan Δp¯ tidak berhimpitan, karena keduanya tidak berhubungan satu sama lain. Misalnya, jika gaya F¯ bekerja melawan kecepatan v¯ benda, maka p¯ dan Δp¯ akan diarahkan ke arah yang berlawanan.
Di manakah pentingnya memperhitungkan sifat vektorial momentum?

Pertanyaan-pertanyaan yang dibahas di atas: ke mana arah vektor momentum suatu benda dan vektor perubahannya, bukan karena rasa ingin tahu belaka. Faktanya adalah hukum kekekalan momentum p¯ terpenuhi untuk setiap komponennya. Artinya, dalam bentuknya yang paling lengkap ditulis sebagai berikut:
p x = m * v x ; p kamu = m * v kamu ; hal z = m * v z .
Setiap komponen vektor p¯ mempertahankan nilainya dalam sistem benda-benda yang berinteraksi yang tidak dipengaruhi oleh gaya luar (Δp¯ = 0).
Bagaimana cara menggunakan hukum dan representasi vektor besaran p¯ ini untuk menyelesaikan masalah yang melibatkan interaksi (tumbukan) benda?
Masalah dengan dua bola
Gambar di bawah menunjukkan dua bola bermassa berbeda yang terbang dengan sudut berbeda terhadap garis horizontal. Misalkan massa bola adalah m 1 = 1 kg, m 2 = 0,5 kg, kecepatan bola v 1 = 2 m/s, v 2 = 3 m/s. Penting untuk menentukan arah impuls setelah tumbukan bola, dengan asumsi bahwa bola benar-benar tidak elastis.

Saat mulai menyelesaikan soal, sebaiknya tuliskan hukum kekekalan momentum dalam bentuk vektor, yaitu:
p 1 ¯ + p 2 ¯ = konstanta.
Karena setiap komponen momentum harus kekal, kita perlu menulis ulang persamaan ini, dengan juga memperhitungkan bahwa setelah tumbukan kedua bola akan mulai bergerak sebagai satu benda (benturan inelastis mutlak):
m 1 * v 1x + m 2 * v 2x = (m 1 + m 2) * u x ;
M 1 * v 1y + m 2 * v 2y = (m 1 + m 2) * uy .
Tanda minus untuk proyeksi momentum benda pertama ke sumbu y muncul karena arahnya melawan vektor sumbu ordinat yang dipilih (lihat gambar).
Sekarang Anda perlu menyatakan komponen kecepatan u yang tidak diketahui, dan kemudian mengganti nilai yang diketahui ke dalam ekspresi (proyeksi kecepatan yang sesuai ditentukan dengan mengalikan besaran vektor v 1 ¯ dan v 2 ¯ dengan fungsi trigonometri ):
u x = (m 1 * v 1x + m 2 * v 2x) / (m 1 + m 2), v 1x = v 1 * cos(45 o); v 2x = v 2 * cos(30 o);
u x = (1 * 2 * 0,7071 + 0,5 * 3 * 0,866) / (1 + 0,5) = 1,8088 m/s;
kamu y = (-m 1 * v 1y + m 2 * v 2y) / (m 1 + m 2), v 1y = v 1 * sin(45 o); v 2y = v 2 * dosa(30 o);
kamu = (-1 * 2 * 0,7071 + 0,5 * 3 * 0,5) / (1 + 0,5) = -0,4428 m/s.
Ini adalah dua komponen kecepatan tubuh setelah tumbukan dan “menempelnya” bola. Karena arah kecepatan bertepatan dengan vektor momentum p¯, maka pertanyaan soal dapat terjawab jika u¯ ditentukan. Sudutnya terhadap sumbu horizontal akan sama dengan garis singgung busur dari perbandingan komponen u y dan u x:
α = arctan(-0,4428 / 1,8088) = -13,756 o.
Tanda minus menunjukkan bahwa momentum (kecepatan) setelah tumbukan akan mengarah ke bawah dari sumbu x.
Peluru kaliber 22 massanya hanya 2 g, jika peluru tersebut dilempar ke seseorang, ia dapat dengan mudah menangkapnya meski tanpa sarung tangan. Jika Anda mencoba menangkap peluru yang terbang keluar dari moncongnya dengan kecepatan 300 m/s, sarung tangan pun tidak akan membantu.
Jika kereta mainan meluncur ke arah Anda, Anda dapat menghentikannya dengan jari kaki Anda. Jika truk melaju ke arah Anda, Anda harus menjauhi jalurnya.


Mari kita perhatikan masalah yang menunjukkan hubungan antara impuls gaya dan perubahan momentum suatu benda.
Contoh. Massa bola adalah 400 g, kecepatan yang diperoleh bola setelah tumbukan adalah 30 m/s. Gaya yang dilakukan kaki pada bola adalah 1500 N, dan waktu tumbukan adalah 8 ms. Temukan impuls gaya dan perubahan momentum benda pada bola.

Perubahan momentum tubuh
Contoh. Perkirakan gaya rata-rata dari lantai yang bekerja pada bola selama tumbukan.
1) Selama tumbukan, dua gaya bekerja pada bola: gaya reaksi tanah, gravitasi.

Gaya reaksi berubah selama waktu tumbukan, sehingga gaya reaksi rata-rata lantai dapat diketahui.
2) Perubahan momentum  badan seperti pada gambar
badan seperti pada gambar

3) Dari hukum kedua Newton

Hal utama yang perlu diingat
1) Rumus impuls benda, impuls gaya;
2) Arah vektor impuls;
3) Temukan perubahan momentum benda
Penurunan hukum kedua Newton dalam bentuk umum

Grafik F(t). Kekuatan variabel
Impuls gaya secara numerik sama dengan luas gambar di bawah grafik F(t).

Jika gaya tidak konstan terhadap waktu, misalnya gaya meningkat secara linier F=kt, maka momentum gaya tersebut sama dengan luas segitiga. Anda dapat mengganti gaya ini dengan gaya konstan yang akan mengubah momentum benda dengan jumlah yang sama dalam periode waktu yang sama

Gaya resultan rata-rata
HUKUM KONSERVASI MOMENTUM
Pengujian daring
Sistem tubuh yang tertutup
Ini adalah sistem tubuh yang hanya berinteraksi satu sama lain. Tidak ada kekuatan interaksi eksternal.
Di dunia nyata, sistem seperti itu tidak mungkin ada; tidak ada cara untuk menghilangkan semua interaksi eksternal. Sistem benda tertutup adalah model fisik, sama seperti titik material adalah modelnya. Ini adalah model sistem benda yang seharusnya hanya berinteraksi satu sama lain; kekuatan eksternal tidak diperhitungkan, mereka diabaikan.
Hukum kekekalan momentum
Dalam sistem tubuh yang tertutup vektor jumlah momentum benda tidak berubah ketika benda berinteraksi. Jika momentum suatu benda bertambah, berarti pada saat itu momentum suatu benda lain (atau beberapa benda) mengalami penurunan dengan jumlah yang sama persis.
Mari kita pertimbangkan contoh ini. Seorang anak perempuan dan laki-laki sedang berseluncur. Sistem benda tertutup - perempuan dan laki-laki (kita mengabaikan gesekan dan kekuatan eksternal lainnya). Gadis itu berdiri diam, momentumnya nol, karena kecepatannya nol (lihat rumus momentum suatu benda). Setelah anak laki-laki yang bergerak dengan kecepatan tertentu bertabrakan dengan anak perempuan, dia juga akan mulai bergerak. Kini tubuhnya mendapat momentum. Nilai numerik momentum anak perempuan sama persis dengan besarnya penurunan momentum anak laki-laki setelah tumbukan.
Sebuah benda bermassa 20 kg bergerak dengan kelajuan, benda kedua bermassa 4 kg bergerak searah dengan kelajuan . Apa impuls masing-masing tubuh? Berapakah momentum sistem tersebut?


Impuls suatu sistem tubuh adalah jumlah vektor momentum semua benda yang termasuk dalam sistem. Dalam contoh kita, ini adalah jumlah dari dua vektor (karena dua benda dianggap) yang diarahkan ke arah yang sama, oleh karena itu

Sekarang mari kita hitung momentum sistem benda dari contoh sebelumnya jika benda kedua bergerak berlawanan arah.

Karena benda bergerak berlawanan arah, kita memperoleh jumlah vektor impuls multiarah. Baca lebih lanjut tentang jumlah vektor.
Hal utama yang perlu diingat
1) Apa yang dimaksud dengan sistem benda tertutup;
2) Hukum kekekalan momentum dan penerapannya
Dorongan tubuh
Momentum suatu benda adalah besaran yang sama dengan hasil kali massa benda dan kecepatannya.
Harus diingat bahwa kita berbicara tentang benda yang dapat direpresentasikan sebagai suatu titik material. Momentum benda ($p$) disebut juga momentum. Konsep momentum diperkenalkan ke dalam fisika oleh René Descartes (1596–1650). Istilah “impuls” muncul belakangan (impulsus dalam bahasa latin berarti “mendorong”). Momentum adalah besaran vektor (seperti kecepatan) dan dinyatakan dengan rumus:
$p↖(→)=mυ↖(→)$
Arah vektor momentum selalu berimpit dengan arah kecepatan.
Satuan SI untuk impuls adalah impuls suatu benda bermassa $1$ kg yang bergerak dengan kecepatan $1$ m/s; oleh karena itu, satuan impuls adalah $1$ kg $·$ m/s.
Jika suatu gaya konstan bekerja pada suatu benda (titik material) selama periode waktu $∆t$, maka percepatannya juga akan konstan:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
di mana $(υ_1)↖(→)$ dan $(υ_2)↖(→)$ adalah kecepatan awal dan akhir benda. Mengganti nilai ini ke dalam ekspresi hukum kedua Newton, kita mendapatkan:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Membuka tanda kurung dan menggunakan ekspresi momentum benda, kita mendapatkan:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Di sini $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ adalah perubahan momentum terhadap waktu $∆t$. Maka persamaan sebelumnya akan berbentuk:
$∆p↖(→)=F↖(→)∆t$
Ekspresi $∆p↖(→)=F↖(→)∆t$ adalah representasi matematis dari hukum kedua Newton.
Hasil kali suatu gaya dan durasi kerjanya disebut dorongan kekuatan. Itu sebabnya perubahan momentum suatu titik sama dengan perubahan momentum gaya yang bekerja padanya.
Ekspresi $∆p↖(→)=F↖(→)∆t$ disebut persamaan gerak benda. Perlu dicatat bahwa tindakan yang sama - perubahan momentum suatu titik - dapat dicapai dengan gaya kecil dalam jangka waktu lama dan dengan gaya besar dalam jangka waktu singkat.
Impuls sistem tel. Hukum Perubahan Momentum
Impuls (jumlah gerak) suatu sistem mekanik adalah vektor yang sama dengan jumlah impuls semua titik material sistem ini:
$(p_(sistem))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Hukum perubahan dan kekekalan momentum merupakan konsekuensi dari hukum kedua dan ketiga Newton.
Mari kita perhatikan suatu sistem yang terdiri dari dua benda. Gaya-gaya ($F_(12)$ dan $F_(21)$ pada gambar yang berinteraksi satu sama lain disebut gaya internal.
Misalkan, selain gaya dalam, gaya luar $(F_1)↖(→)$ dan $(F_2)↖(→)$ bekerja pada sistem. Untuk setiap benda kita dapat menulis persamaan $∆p↖(→)=F↖(→)∆t$. Menambahkan ruas kiri dan kanan persamaan ini, kita mendapatkan:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Menurut hukum ketiga Newton, $(F_(12))↖(→)=-(F_(21))↖(→)$.
Karena itu,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
Di sisi kiri ada jumlah geometri perubahan impuls semua benda sistem, sama dengan perubahan impuls sistem itu sendiri - $(∆p_(syst))↖(→)$. Dengan mempertimbangkan hal ini persamaan $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ dapat ditulis:
$(∆p_(sistem))↖(→)=F↖(→)∆t$
di mana $F↖(→)$ adalah jumlah semua gaya luar yang bekerja pada benda. Hasil yang diperoleh berarti momentum sistem hanya dapat diubah oleh gaya luar, dan perubahan momentum sistem diarahkan sama dengan gaya luar total. Inilah inti dari hukum perubahan momentum suatu sistem mekanik.
Gaya dalam tidak dapat mengubah momentum total sistem. Mereka hanya mengubah impuls dari masing-masing bagian sistem.
Hukum kekekalan momentum
Hukum kekekalan momentum mengikuti persamaan $(∆p_(syst))↖(→)=F↖(→)∆t$. Jika tidak ada gaya luar yang bekerja pada sistem, maka ruas kanan persamaan $(∆p_(syst))↖(→)=F↖(→)∆t$ menjadi nol, yang berarti momentum total sistem tidak berubah :
$(∆p_(sistem))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=konstan$
Suatu sistem yang tidak ada gaya luar yang bekerja atau resultan gaya luar sama dengan nol disebut tertutup.
Hukum kekekalan momentum menyatakan:
Momentum total suatu sistem benda tertutup tetap konstan untuk setiap interaksi benda-benda dalam sistem satu sama lain.
Hasil yang diperoleh valid untuk sistem yang berisi sejumlah benda yang berubah-ubah. Jika jumlah gaya luar tidak sama dengan nol, tetapi jumlah proyeksinya ke suatu arah sama dengan nol, maka proyeksi momentum sistem ke arah tersebut tidak berubah. Jadi, misalnya, suatu sistem benda di permukaan bumi tidak dapat dianggap tertutup karena gaya gravitasi yang bekerja pada semua benda, namun jumlah proyeksi impuls ke arah horizontal dapat tetap tidak berubah (tanpa adanya gesekan), karena gaya gravitasi tidak bekerja pada arah ini.
Penggerak jet
Mari kita perhatikan contoh-contoh yang menegaskan keabsahan hukum kekekalan momentum.
Mari kita ambil bola karet anak-anak, kembangkan dan lepaskan. Kita akan melihat bahwa ketika udara mulai meninggalkannya ke satu arah, bola itu sendiri akan terbang ke arah lain. Gerak bola merupakan salah satu contoh gerak jet. Hal ini dijelaskan oleh hukum kekekalan momentum: momentum total sistem “bola ditambah udara di dalamnya” sebelum udara mengalir keluar adalah nol; itu harus tetap sama dengan nol selama pergerakan; oleh karena itu, bola bergerak ke arah yang berlawanan dengan arah aliran pancaran, dan dengan kecepatan sedemikian rupa sehingga momentumnya sama besarnya dengan momentum pancaran udara.
Gerakan jet sebutlah gerak suatu benda yang terjadi bila suatu bagian benda itu terpisah darinya dengan kecepatan berapa pun. Berdasarkan hukum kekekalan momentum, arah gerak benda berlawanan dengan arah gerak bagian yang dipisahkan.
Penerbangan roket didasarkan pada prinsip propulsi jet. Roket luar angkasa modern adalah pesawat yang sangat kompleks. Massa roket terdiri dari massa fluida kerja (yaitu, gas panas yang terbentuk sebagai hasil pembakaran bahan bakar dan dipancarkan dalam bentuk aliran jet) dan massa akhir, atau, seperti yang mereka katakan, massa “kering”. roket yang tersisa setelah fluida kerja dikeluarkan dari roket.
Ketika semburan gas dikeluarkan dari roket dengan kecepatan tinggi, roket itu sendiri akan melesat ke arah yang berlawanan. Menurut hukum kekekalan momentum, momentum $m_(p)υ_p$ yang diperoleh roket harus sama dengan momentum $m_(gas)·υ_(gas)$ gas yang dikeluarkan:
$m_(p)υ_p=m_(gas)·υ_(gas)$
Oleh karena itu kecepatan roket
$υ_p=((m_(gas))/(m_p))·υ_(gas)$
Dari rumus ini jelas bahwa semakin besar kecepatan roket, semakin besar pula kecepatan gas yang dikeluarkan dan perbandingan massa fluida kerja (yaitu massa bahan bakar) dengan massa akhir (“kering”). massa roket.
Rumus $υ_p=((m_(gas))/(m_p))·υ_(gas)$ adalah perkiraan. Hal ini tidak memperhitungkan bahwa seiring dengan pembakaran bahan bakar, massa roket yang terbang menjadi semakin berkurang. Rumus pasti kecepatan roket diperoleh pada tahun 1897 oleh K. E. Tsiolkovsky dan menyandang namanya.
Pekerjaan paksa
Istilah “usaha” diperkenalkan ke dalam fisika pada tahun 1826 oleh ilmuwan Perancis J. Poncelet. Jika dalam kehidupan sehari-hari hanya kerja manusia yang disebut usaha, maka dalam fisika dan khususnya mekanika secara umum diterima bahwa usaha dilakukan dengan gaya. Kuantitas fisik pekerjaan biasanya dilambangkan dengan huruf $A$.
Pekerjaan paksa adalah ukuran aksi suatu gaya, bergantung pada besaran dan arahnya, serta pergerakan titik penerapan gaya tersebut. Untuk gaya konstan dan perpindahan linier, usaha ditentukan oleh persamaan:
$A=F|∆r↖(→)|cosα$
dimana $F$ adalah gaya yang bekerja pada benda, $∆r↖(→)$ adalah perpindahan, $α$ adalah sudut antara gaya dan perpindahan.

Kerja gaya sama dengan hasil kali modulus gaya dan perpindahan serta kosinus sudut di antara keduanya, yaitu hasil kali skalar vektor $F↖(→)$ dan $∆r↖(→)$.
Usaha merupakan besaran skalar. Jika $α 0$, dan jika $90°
Ketika beberapa gaya bekerja pada suatu benda, usaha total (jumlah usaha semua gaya) sama dengan usaha gaya yang dihasilkan.
Satuan kerja dalam SI adalah Joule($1$ J). $1$ J adalah usaha yang dilakukan oleh gaya sebesar $1$ N sepanjang lintasan sebesar $1$ m dalam arah aksi gaya tersebut. Satuan ini dinamai ilmuwan Inggris J. Joule (1818-1889): $1$ J = $1$ N $·$ m. Kilojoule dan milijoule juga sering digunakan: $1$ kJ $= 1,000$ J, $1$ mJ $ = $0,001J.
Pekerjaan gravitasi
Mari kita perhatikan sebuah benda yang meluncur sepanjang bidang miring dengan sudut kemiringan $α$ dan tinggi $H$.

Mari kita nyatakan $∆x$ dalam bentuk $H$ dan $α$:
$∆x=(H)/(sinα)$
Mengingat gaya gravitasi $F_т=mg$ membentuk sudut ($90° - α$) dengan arah gerak, dengan menggunakan rumus $∆x=(H)/(sin)α$, kita memperoleh ekspresi untuk kerja gravitasi $A_g$:
$A_g=mg cos(90°-α) (H)/(sinα)=mgH$
Dari rumus ini jelas bahwa usaha yang dilakukan gravitasi bergantung pada ketinggian dan tidak bergantung pada sudut kemiringan bidang.
Oleh karena itu:
- kerja gravitasi tidak bergantung pada bentuk lintasan yang dilalui benda, tetapi hanya pada posisi awal dan akhir benda;
- ketika suatu benda bergerak sepanjang lintasan tertutup, usaha yang dilakukan oleh gravitasi sama dengan nol, yaitu gravitasi adalah gaya konservatif (gaya yang memiliki sifat ini disebut gaya konservatif).
Kerja gaya reaksi, sama dengan nol, karena gaya reaksi ($N$) diarahkan tegak lurus terhadap perpindahan $∆x$.
Pekerjaan gaya gesekan
Gaya gesek berlawanan arah dengan perpindahan $∆x$ dan membentuk sudut $180°$ dengannya, oleh karena itu usaha gaya gesek adalah negatif:
$A_(tr)=F_(tr)∆x·cos180°=-F_(tr)·∆x$
Karena $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ maka
$A_(tr)=μmgHctgα$
Kerja gaya elastis
Biarkan gaya luar $F↖(→)$ bekerja pada pegas tak teregang yang panjangnya $l_0$, sehingga meregangkannya sebesar $∆l_0=x_0$. Di posisi $x=x_0F_(kontrol)=kx_0$. Setelah gaya $F↖(→)$ berhenti bekerja di titik $x_0$, pegas dikompresi di bawah aksi gaya $F_(kontrol)$.

Mari kita tentukan kerja gaya elastis ketika koordinat ujung kanan pegas berubah dari $x_0$ menjadi $x$. Karena gaya elastis di area ini berubah secara linier, hukum Hooke dapat menggunakan nilai rata-ratanya di area ini:
$F_(rata-rata kontrol)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Maka usahanya (dengan mempertimbangkan fakta bahwa arah $(F_(control av.))↖(→)$ dan $(∆x)↖(→)$ bertepatan) sama dengan:
$A_(kontrol)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Dapat ditunjukkan bahwa bentuk rumus terakhir tidak bergantung pada sudut antara $(F_(control av.))↖(→)$ dan $(∆x)↖(→)$. Kerja gaya elastis hanya bergantung pada deformasi pegas pada keadaan awal dan akhir.
Jadi, gaya elastis, seperti gaya gravitasi, merupakan gaya konservatif.
Kekuatan kekuatan
Daya adalah besaran fisis yang diukur dengan perbandingan kerja dengan periode waktu produksinya.
Dengan kata lain, daya menunjukkan berapa banyak usaha yang dilakukan per satuan waktu (dalam SI - per $1$ s).
Kekuatan ditentukan oleh rumus:
dimana $N$ adalah daya, $A$ adalah usaha yang dilakukan selama waktu $∆t$.
Mengganti rumus $N=(A)/(∆t)$ dan bukan hasil kali $A$ dengan ekspresi $A=F|(∆r)↖(→)|cosα$, kita memperoleh:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Daya sama dengan hasil kali besar vektor gaya dan kecepatan serta kosinus sudut antara vektor-vektor tersebut.
Daya dalam sistem SI diukur dalam watt (W). Satu watt ($1$ W) adalah daya yang diperlukan untuk melakukan kerja sebesar $1$ J selama $1$ s: $1$ W $= 1$ J/s.
Nama unit ini diambil dari nama penemu Inggris J. Watt (Watt), yang membangun mesin uap pertama. J. Watt sendiri (1736-1819) menggunakan satuan daya lain – tenaga kuda (hp), yang ia perkenalkan agar ia dapat membandingkan kinerja mesin uap dan kuda: $1$ hp. $= 735,5$W.
Dalam teknologi, unit daya yang lebih besar sering digunakan - kilowatt dan megawatt: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
Energi kinetik. Hukum perubahan energi kinetik
Jika suatu benda atau beberapa benda yang berinteraksi (suatu sistem benda) dapat melakukan usaha, maka benda-benda tersebut dikatakan mempunyai energi.
Kata “energi” (dari bahasa Yunani energia - tindakan, aktivitas) sering digunakan dalam kehidupan sehari-hari. Misalnya orang yang dapat mengerjakan pekerjaan dengan cepat disebut energik, mempunyai tenaga yang besar.
Energi yang dimiliki suatu benda akibat gerak disebut energi kinetik.
Seperti halnya pengertian energi secara umum, mengenai energi kinetik dapat kita katakan bahwa energi kinetik adalah kemampuan suatu benda yang bergerak untuk melakukan usaha.
Mari kita cari energi kinetik benda bermassa $m$ yang bergerak dengan kecepatan $υ$. Karena energi kinetik adalah energi akibat gerak, keadaan nolnya adalah keadaan saat benda diam. Setelah menemukan usaha yang diperlukan untuk memberikan kecepatan tertentu pada suatu benda, kita akan menemukan energi kinetiknya.
Untuk melakukannya, mari kita hitung usaha pada luas perpindahan $∆r↖(→)$ ketika arah vektor gaya $F↖(→)$ dan perpindahan $∆r↖(→)$ bertepatan. Dalam hal ini usahanya sama
dimana $∆x=∆r$

Untuk gerak suatu titik dengan percepatan $α=const$, persamaan perpindahan mempunyai bentuk:
$∆x=υ_1t+(pada^2)/(2),$
dimana $υ_1$ adalah kecepatan awal.
Substitusikan persamaan $A=F·∆x$ ke persamaan $∆x$ dari $∆x=υ_1t+(at^2)/(2)$ dan gunakan hukum kedua Newton $F=ma$, kita peroleh:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Menyatakan percepatan melalui kecepatan awal $υ_1$ dan $υ_2$ akhir $a=(υ_2-υ_1)/(t)$ dan menggantinya dengan $A=ma(υ_1t+(at^2)/(2))=(mat )/ (2)(2υ_1+at)$ kita punya:
$A=(m(υ_2-υ_1))/(2)·(2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Sekarang menyamakan kecepatan awal dengan nol: $υ_1=0$, kita memperoleh ekspresi untuk energi kinetik:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Jadi, benda yang bergerak mempunyai energi kinetik. Energi ini sama dengan usaha yang harus dilakukan untuk meningkatkan kecepatan benda dari nol ke nilai $υ$.
Dari $E_K=(mυ)/(2)=(p^2)/(2m)$ maka usaha yang dilakukan oleh suatu gaya untuk memindahkan suatu benda dari satu posisi ke posisi lain sama dengan perubahan energi kinetik:
$A=E_(K_2)-E_(K_1)=∆E_K$
Persamaan $A=E_(K_2)-E_(K_1)=∆E_K$ menyatakan teorema perubahan energi kinetik.
Perubahan energi kinetik tubuh(titik material) untuk jangka waktu tertentu sama dengan usaha yang dilakukan selama waktu tersebut oleh gaya yang bekerja pada benda.
Energi potensial
Energi potensial adalah energi yang ditentukan oleh kedudukan relatif benda-benda atau bagian-bagian tubuh yang berinteraksi.
Karena energi didefinisikan sebagai kemampuan suatu benda untuk melakukan kerja, maka energi potensial secara alami didefinisikan sebagai kerja yang dilakukan oleh suatu gaya, yang hanya bergantung pada posisi relatif benda tersebut. Ini adalah kerja gravitasi $A=mgh_1-mgh_2=mgH$ dan kerja elastisitas:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Energi potensial tubuh berinteraksi dengan Bumi, mereka menyebut besaran yang sama dengan hasil kali massa $m$ benda tersebut dengan percepatan jatuh bebas $g$ dan tinggi $h$ benda di atas permukaan bumi:
Energi potensial benda yang mengalami deformasi elastis adalah nilai yang sama dengan setengah hasil kali koefisien elastisitas (kekakuan) $k$ benda dan kuadrat deformasi $∆l$:
$E_p=(1)/(2)k∆l^2$
Kerja gaya konservatif (gravitasi dan elastisitas), dengan memperhitungkan $E_p=mgh$ dan $E_p=(1)/(2)k∆l^2$, dinyatakan sebagai berikut:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Rumus ini memungkinkan kita memberikan definisi umum tentang energi potensial.
Energi potensial suatu sistem adalah besaran yang bergantung pada posisi benda, yang perubahannya selama transisi sistem dari keadaan awal ke keadaan akhir sama dengan kerja gaya konservatif internal sistem, diambil dengan tanda sebaliknya.
Tanda minus di ruas kanan persamaan $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ berarti ketika usaha dilakukan oleh gaya dalam ( misalnya, benda jatuh ke tanah karena pengaruh gravitasi dalam sistem “batuan-Bumi”), energi sistem berkurang. Usaha dan perubahan energi potensial suatu sistem selalu mempunyai tanda yang berlawanan.
Karena usaha hanya menentukan perubahan energi potensial, maka hanya perubahan energi yang mempunyai arti fisis dalam mekanika. Oleh karena itu, pemilihan tingkat energi nol bersifat arbitrer dan ditentukan semata-mata oleh pertimbangan kenyamanan, misalnya kemudahan menulis persamaan yang sesuai.
Hukum perubahan dan kekekalan energi mekanik
Energi mekanik total sistem jumlah energi kinetik dan energi potensialnya disebut:
Hal ini ditentukan oleh posisi benda (energi potensial) dan kecepatannya (energi kinetik).
Menurut teorema energi kinetik,
$E_k-E_(k_1)=A_p+A_(pr),$
dimana $A_p$ adalah hasil kerja gaya-gaya potensial, $A_(pr)$ adalah hasil kerja gaya-gaya non-potensial.
Pada gilirannya, kerja gaya potensial sama dengan perbedaan energi potensial benda pada keadaan awal $E_(p_1)$ dan $E_p$ akhir. Dengan mempertimbangkan hal ini, kami memperoleh ekspresi untuk hukum perubahan energi mekanik:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
dimana ruas kiri persamaan adalah perubahan energi mekanik total, dan ruas kanan adalah kerja gaya-gaya nonpotensial.
Jadi, hukum perubahan energi mekanik berbunyi:
Perubahan energi mekanik sistem sama dengan kerja semua gaya nonpotensial.
Sistem mekanis di mana hanya gaya potensial yang bekerja disebut konservatif.
Dalam sistem konservatif $A_(pr) = 0$. ini menyiratkan hukum kekekalan energi mekanik:
Dalam sistem konservatif tertutup, energi mekanik totalnya kekal (tidak berubah terhadap waktu):
$E_k+E_p=E_(k_1)+E_(p_1)$
Hukum kekekalan energi mekanik diturunkan dari hukum mekanika Newton, yang berlaku pada sistem titik material (atau makropartikel).
Namun, hukum kekekalan energi mekanik juga berlaku untuk sistem mikropartikel, dimana hukum Newton sendiri tidak berlaku lagi.
Hukum kekekalan energi mekanik merupakan konsekuensi dari keseragaman waktu.
Keseragaman waktu adalah bahwa, pada kondisi awal yang sama, terjadinya proses fisik tidak bergantung pada kapan kondisi tersebut tercipta.
Hukum kekekalan energi mekanik total berarti bahwa ketika energi kinetik dalam sistem konservatif berubah, energi potensialnya juga harus berubah agar jumlahnya tetap. Ini berarti kemungkinan mengubah satu jenis energi menjadi energi lain.
Sesuai dengan berbagai bentuk gerak materi, berbagai jenis energi dipertimbangkan: mekanik, internal (sama dengan jumlah energi kinetik dari pergerakan kacau molekul relatif terhadap pusat massa benda dan energi potensial benda. interaksi molekul satu sama lain), elektromagnetik, kimia (yang terdiri dari energi kinetik pergerakan elektron dan energi listrik interaksinya satu sama lain dan dengan inti atom), nuklir, dll. Dari penjelasan di atas jelas bahwa pembagian energi menjadi berbagai jenis cukup bersyarat.
Fenomena alam biasanya disertai dengan transformasi suatu jenis energi menjadi energi lainnya. Misalnya, gesekan bagian-bagian dari berbagai mekanisme menyebabkan konversi energi mekanik menjadi panas, yaitu. energi dalam. Sebaliknya, pada mesin kalor, energi dalam diubah menjadi energi mekanik; dalam sel galvanik, energi kimia diubah menjadi energi listrik, dll.
Saat ini konsep energi merupakan salah satu konsep dasar fisika. Konsep ini tidak dapat dipisahkan dari gagasan transformasi suatu bentuk gerakan menjadi bentuk gerakan lainnya.
Berikut rumusan konsep energi dalam fisika modern:
Energi adalah ukuran kuantitatif umum dari pergerakan dan interaksi semua jenis materi. Energi tidak muncul dari ketiadaan dan tidak hilang, ia hanya dapat berpindah dari satu bentuk ke bentuk lainnya. Konsep energi menghubungkan semua fenomena alam.
Mekanisme sederhana. Efisiensi mekanisme
Mekanisme sederhana adalah perangkat yang mengubah besaran atau arah gaya yang diterapkan pada suatu benda.
Mereka digunakan untuk memindahkan atau mengangkat beban besar dengan sedikit usaha. Ini termasuk tuas dan variasinya - balok (bergerak dan tetap), gerbang, bidang miring dan variasinya - baji, sekrup, dll.
Lengan tuas. Aturan leverage
Tuas adalah benda kaku yang mampu berputar mengelilingi penyangga tetap.

Aturan leverage mengatakan:
Sebuah tuas berada dalam keadaan setimbang jika gaya yang diberikan padanya berbanding terbalik dengan lengannya:
$(F_2)/(F_1)=(l_1)/(l_2)$
Dari rumus $(F_2)/(F_1)=(l_1)/(l_2)$, dengan menerapkan sifat proporsi padanya (hasil kali suku ekstrim suatu proporsi sama dengan hasil kali suku tengahnya), kita dapat diperoleh rumus berikut:
Namun $F_1l_1=M_1$ adalah momen gaya yang cenderung memutar tuas searah jarum jam, dan $F_2l_2=M_2$ adalah momen gaya yang mencoba memutar tuas berlawanan arah jarum jam. Jadi $M_1=M_2$ itulah yang perlu dibuktikan.
Tuas mulai digunakan oleh manusia pada zaman dahulu. Dengan bantuannya, lempengan batu yang berat dapat diangkat selama pembangunan piramida di Mesir Kuno. Tanpa leverage hal ini tidak akan mungkin terjadi. Memang, misalnya, untuk pembangunan piramida Cheops, yang tingginya $147$ m, lebih dari dua juta balok batu digunakan, yang terkecil berbobot $2,5$ ton!
Saat ini, tuas banyak digunakan baik dalam produksi (misalnya crane) maupun dalam kehidupan sehari-hari (gunting, pemotong kawat, timbangan).
Blok tetap
Aksi sebuah balok tetap mirip dengan aksi sebuah tuas dengan lengan yang sama: $l_1=l_2=r$. Gaya yang diterapkan $F_1$ sama dengan beban $F_2$, dan kondisi keseimbangannya adalah:
Blok tetap digunakan ketika Anda perlu mengubah arah suatu gaya tanpa mengubah besarnya.
Blok bergerak
Balok yang bergerak berfungsi serupa dengan tuas, yang lengannya adalah: $l_2=(l_1)/(2)=r$. Dalam hal ini, kondisi keseimbangannya berbentuk:
dimana $F_1$ adalah gaya yang diterapkan, $F_2$ adalah beban. Penggunaan balok bergerak memberikan peningkatan kekuatan ganda.
Kerekan katrol (sistem blok)

Kerekan rantai konvensional terdiri dari $n$ balok bergerak dan $n$ balok tetap. Menggunakannya memberikan peningkatan kekuatan sebesar $2n$ kali:
$F_1=(F_2)/(2n)$
Kerekan rantai listrik terdiri dari n balok bergerak dan satu balok tetap. Penggunaan katrol listrik memberikan perolehan kekuatan sebesar $2^n$ kali:
$F_1=(F_2)/(2^n)$

Baut
Sekrup adalah bidang miring yang dililitkan pada suatu sumbu.
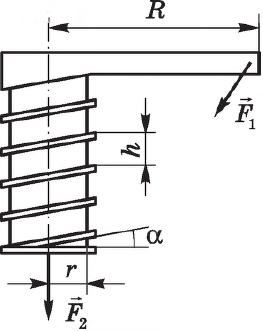
Kondisi keseimbangan gaya-gaya yang bekerja pada baling-baling berbentuk:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

dimana $F_1$ adalah gaya luar yang diterapkan pada baling-baling dan bekerja pada jarak $R$ dari porosnya; $F_2$ adalah gaya yang bekerja searah sumbu baling-baling; $h$ — jarak baling-baling; $r$ adalah radius thread rata-rata; $α$ adalah sudut kemiringan benang. $R$ adalah panjang tuas (kunci pas) yang memutar sekrup dengan gaya $F_1$.
Efisiensi
Koefisien efisiensi (efisiensi) adalah perbandingan kerja yang berguna dengan seluruh kerja yang dikeluarkan.
Efisiensi sering kali dinyatakan dalam persentase dan dilambangkan dengan huruf Yunani $η$ (“ini”):
$η=(A_p)/(A_3)·100%$
dimana $A_n$ adalah pekerjaan yang berguna, $A_3$ adalah semua pekerjaan yang dikeluarkan.
Pekerjaan yang berguna selalu hanya merupakan sebagian dari total pekerjaan yang dikeluarkan seseorang dengan menggunakan mekanisme tertentu.
Sebagian dari usaha yang dilakukan dihabiskan untuk mengatasi gaya gesekan. Karena $A_3 > A_n$, efisiensinya selalu kurang dari $1$ (atau $< 100%$).
Karena masing-masing usaha dalam persamaan ini dapat dinyatakan sebagai hasil kali gaya yang bersangkutan dan jarak yang ditempuh, maka usaha tersebut dapat ditulis ulang sebagai berikut: $F_1s_1≈F_2s_2$.
Oleh karena itu, menang dengan bantuan mekanisme yang berlaku, kita kalah dengan jumlah yang sama, dan sebaliknya. Hukum ini disebut aturan emas mekanika.
Aturan emas mekanika adalah hukum perkiraan, karena tidak memperhitungkan kerja mengatasi gesekan dan gravitasi dari bagian-bagian peralatan yang digunakan. Namun demikian, ini bisa sangat berguna dalam menganalisis pengoperasian mekanisme sederhana apa pun.

Jadi, misalnya, berkat aturan ini, kita dapat langsung mengatakan bahwa pekerja yang ditunjukkan pada gambar, dengan penguatan dua kali lipat gaya mengangkat beban sebesar $10$ cm, harus menurunkan ujung tuas yang berlawanan sebesar $20 $cm.
Tabrakan tubuh. Dampak elastis dan inelastis
Hukum kekekalan momentum dan energi mekanik digunakan untuk menyelesaikan masalah gerak benda setelah tumbukan: dari impuls dan energi yang diketahui sebelum tumbukan, nilai besaran-besaran ini setelah tumbukan ditentukan. Mari kita perhatikan kasus dampak elastis dan inelastis.
Suatu tumbukan disebut inelastis mutlak, setelah itu benda-benda tersebut membentuk satu benda yang bergerak dengan kecepatan tertentu. Masalah kecepatan yang terakhir diselesaikan dengan menggunakan hukum kekekalan momentum sistem benda bermassa $m_1$ dan $m_2$ (jika kita berbicara tentang dua benda) sebelum dan sesudah tumbukan:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Jelas bahwa energi kinetik benda selama tumbukan inelastis tidak kekal (misalnya, untuk $(υ_1)↖(→)=-(υ_2)↖(→)$ dan $m_1=m_2$ menjadi sama dengan nol setelah dampaknya).
Suatu tumbukan yang tidak hanya jumlah impulsnya yang kekal, tetapi juga jumlah energi kinetik benda yang tumbukan disebut lenting mutlak.
Untuk tumbukan lenting mutlak, persamaan berikut ini berlaku:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2 )^2)/(2)$
dimana $m_1, m_2$ adalah massa bola, $υ_1, υ_2$ adalah kecepatan bola sebelum tumbukan, $υ"_1, υ"_2$ adalah kecepatan bola setelah tumbukan.
Setelah mempelajari hukum Newton, kita melihat bahwa dengan bantuannya kita dapat memecahkan masalah dasar mekanika jika kita mengetahui semua gaya yang bekerja pada benda. Ada situasi di mana sulit atau bahkan tidak mungkin untuk menentukan nilai-nilai ini. Mari kita pertimbangkan beberapa situasi seperti itu.Ketika dua bola bilyar atau mobil bertumbukan, kita dapat menegaskan tentang gaya yang bekerja bahwa ini adalah sifatnya; gaya elastis bekerja di sini. Namun, kita tidak akan dapat secara akurat menentukan modulus atau arahnya, terutama karena gaya-gaya ini memiliki durasi kerja yang sangat singkat.Dengan adanya pergerakan roket dan pesawat jet, kita juga tidak dapat berkata banyak mengenai kekuatan yang menggerakkan benda-benda tersebut.Dalam kasus seperti itu, metode digunakan yang memungkinkan seseorang menghindari penyelesaian persamaan gerak dan segera menggunakan konsekuensi persamaan tersebut. Dalam hal ini, besaran fisika baru diperkenalkan. Mari kita perhatikan salah satu besaran ini, yang disebut momentum benda
Sebuah anak panah ditembakkan dari busurnya. Semakin lama kontak tali dengan anak panah (∆t), semakin besar perubahan momentum anak panah (∆), dan oleh karena itu, semakin tinggi kecepatan akhirnya.
Dua bola bertabrakan. Saat bola-bola bersentuhan, mereka bekerja satu sama lain dengan gaya yang besarnya sama, seperti yang diajarkan hukum ketiga Newton kepada kita. Artinya perubahan momentumnya juga harus sama besarnya, meskipun massa bola tidak sama.
Setelah menganalisis rumus, dua kesimpulan penting dapat ditarik:
1. Gaya-gaya identik yang bekerja dalam periode waktu yang sama menyebabkan perubahan momentum yang sama pada benda-benda yang berbeda, berapa pun massa benda tersebut.
2. Perubahan momentum suatu benda yang sama dapat dicapai baik dengan bekerja dengan gaya kecil dalam jangka waktu yang lama, atau dengan bertindak singkat dengan gaya besar pada benda yang sama.
Berdasarkan hukum kedua Newton, kita dapat menulis:
∆t = ∆ = ∆ / ∆t
Perbandingan perubahan momentum suatu benda dengan periode waktu terjadinya perubahan tersebut sama dengan jumlah gaya yang bekerja pada benda tersebut.
Setelah menganalisis persamaan ini, kita melihat bahwa hukum kedua Newton memungkinkan kita untuk memperluas kelas masalah yang harus diselesaikan dan mencakup masalah-masalah di mana massa benda berubah seiring waktu.
Jika kita mencoba menyelesaikan masalah dengan massa benda yang bervariasi menggunakan rumusan umum hukum kedua Newton:
maka mencoba solusi seperti itu akan menyebabkan kesalahan.
Contohnya adalah pesawat jet atau roket luar angkasa yang telah disebutkan, yang membakar bahan bakar saat bergerak, dan produk pembakaran ini dilepaskan ke ruang sekitarnya. Secara alami, massa pesawat atau roket berkurang seiring dengan konsumsi bahan bakar.
Terlepas dari kenyataan bahwa hukum kedua Newton dalam bentuk "gaya resultan sama dengan produk massa suatu benda dan percepatannya" memungkinkan kita untuk memecahkan berbagai masalah yang cukup luas, ada beberapa kasus gerak benda yang tidak dapat diselesaikan. sepenuhnya dijelaskan oleh persamaan ini. Dalam hal demikian, perlu diterapkan rumusan lain dari hukum kedua, yang menghubungkan perubahan momentum suatu benda dengan impuls gaya resultan. Selain itu, ada sejumlah soal yang penyelesaian persamaan geraknya secara matematis sangat sulit atau bahkan tidak mungkin. Dalam kasus seperti ini, berguna bagi kita untuk menggunakan konsep momentum.
Dengan menggunakan hukum kekekalan momentum dan hubungan antara momentum suatu gaya dan momentum suatu benda, kita dapat menurunkan hukum kedua dan ketiga Newton.
Hukum kedua Newton diturunkan dari hubungan antara impuls suatu gaya dan momentum suatu benda.
Impuls gaya sama dengan perubahan momentum benda:

Setelah melakukan perpindahan yang sesuai, kita memperoleh ketergantungan gaya pada percepatan, karena percepatan didefinisikan sebagai perbandingan perubahan kecepatan dengan waktu terjadinya perubahan tersebut:

Mengganti nilai-nilai tersebut ke dalam rumus kita, kita memperoleh rumus hukum kedua Newton:
![]()
Untuk menurunkan hukum ketiga Newton, kita memerlukan hukum kekekalan momentum.
Vektor menekankan sifat vektor kecepatan, yaitu fakta bahwa kecepatan dapat berubah arah. Setelah transformasi kita mendapatkan:

Karena periode waktu dalam sistem tertutup bernilai konstan untuk kedua benda, kita dapat menulis:

Kita telah memperoleh hukum ketiga Newton: dua benda berinteraksi satu sama lain dengan gaya yang sama besarnya dan berlawanan arah. Vektor-vektor gaya-gaya ini diarahkan satu sama lain, masing-masing modul gaya-gaya ini memiliki nilai yang sama.
Bibliografi
- Tikhomirova S.A., Yavorsky B.M. Fisika (tingkat dasar) - M.: Mnemosyne, 2012.
- Gendenshtein L.E., Dick Yu.I. Fisika kelas 10. - M.: Mnemosyne, 2014.
- Kikoin I.K., Kikoin A.K. Fisika - 9, Moskow, Pendidikan, 1990.
Pekerjaan rumah
- Definisikan impuls suatu benda, impuls gaya.
- Bagaimana hubungan impuls suatu benda dengan impuls gaya?
- Kesimpulan apa yang dapat diambil dari rumus impuls benda dan impuls gaya?
- Portal internet Pertanyaan-physics.ru ().
- Portal internet Frutmrut.ru ().
- Portal internet Fizmat.by().
Hukum Newton memungkinkan penyelesaian berbagai masalah praktis penting mengenai interaksi dan gerak benda. Sejumlah besar masalah seperti itu terkait, misalnya, dengan mencari percepatan suatu benda yang bergerak jika semua gaya yang bekerja pada benda tersebut diketahui. Dan kemudian besaran lainnya (kecepatan sesaat, perpindahan, dll.) ditentukan oleh percepatan.
Namun seringkali sangat sulit untuk menentukan gaya yang bekerja pada benda. Oleh karena itu, untuk menyelesaikan banyak masalah, besaran fisika penting lainnya digunakan - momentum benda.
- Momentum suatu benda p adalah besaran fisika vektor yang sama dengan hasil kali massa benda dan kecepatannya
Momentum merupakan besaran vektor. Arah vektor momentum suatu benda selalu berimpit dengan arah vektor kecepatan gerak.
Satuan SI untuk impuls adalah impuls suatu benda bermassa 1 kg yang bergerak dengan kecepatan 1 m/s. Artinya satuan SI untuk momentum suatu benda adalah 1 kg m/s.
Saat melakukan perhitungan, gunakan persamaan proyeksi vektor: р x = mv x.
Bergantung pada arah vektor kecepatan relatif terhadap sumbu X yang dipilih, proyeksi vektor momentum dapat berupa positif atau negatif.
Kata “impuls” (impulsus) yang diterjemahkan dari bahasa latin berarti “mendorong”. Beberapa buku menggunakan istilah "momentum" dan bukan istilah "impuls".
Besaran ini diperkenalkan ke dalam sains kira-kira pada periode waktu yang sama ketika Newton menemukan hukum-hukum yang kemudian dinamai menurut namanya (yaitu pada akhir abad ke-17).
Ketika suatu benda berinteraksi, impulsnya dapat berubah. Hal ini dapat dibuktikan melalui pengalaman sederhana.
Dua bola bermassa sama digantungkan pada simpul benang dari penggaris kayu yang dipasang pada cincin tripod, seperti ditunjukkan pada Gambar 44, a.
Beras. 44. Demonstrasi hukum kekekalan momentum
Bola 2 dibelokkan dari vertikal dengan sudut a (Gbr. 44, b) dan dilepaskan. Kembali ke posisi sebelumnya, dia memukul bola 1 dan berhenti. Dalam hal ini, bola 1 mulai bergerak dan menyimpang dengan sudut yang sama a (Gbr. 44, c).
Dalam hal ini, jelaslah bahwa akibat interaksi bola-bola, momentum masing-masing bola telah berubah: seberapa besar momentum bola 2 berkurang, maka momentum bola 1 bertambah dengan jumlah yang sama.
Jika dua benda atau lebih hanya berinteraksi satu sama lain (yaitu tidak terkena gaya luar), maka benda-benda tersebut membentuk sistem tertutup.
Momentum setiap benda yang termasuk dalam sistem tertutup dapat berubah akibat interaksinya satu sama lain. Tetapi
- jumlah vektor impuls benda-benda yang membentuk sistem tertutup tidak berubah seiring waktu untuk setiap pergerakan dan interaksi benda-benda tersebut
Ini adalah hukum kekekalan momentum.
Hukum kekekalan momentum juga terpenuhi jika benda-benda dalam sistem dikenai gaya luar yang jumlah vektornya sama dengan nol. Mari kita tunjukkan hal ini dengan menggunakan hukum kedua dan ketiga Newton untuk menurunkan hukum kekekalan momentum. Untuk mempermudah, mari kita perhatikan sistem yang hanya terdiri dari dua benda - bola bermassa m 1 dan m 2, yang bergerak lurus ke arah satu sama lain dengan kecepatan v 1 dan v 2 (Gbr. 45).

Beras. 45. Sistem dua benda – bola yang bergerak lurus menuju satu sama lain
Gaya gravitasi yang bekerja pada masing-masing bola diimbangi oleh gaya elastis permukaan tempat bola menggelinding. Artinya, aksi kekuatan-kekuatan ini dapat diabaikan. Kekuatan perlawanan terhadap gerakan dalam hal ini kecil, jadi kami juga tidak akan memperhitungkan pengaruhnya. Jadi, kita dapat berasumsi bahwa bola-bola tersebut hanya berinteraksi satu sama lain.
Dari Gambar 45 terlihat bahwa lama kelamaan bola-bola tersebut akan bertumbukan. Selama tumbukan yang berlangsung dalam waktu yang sangat singkat t, akan timbul gaya interaksi F 1 dan F 2 yang diterapkan masing-masing pada bola pertama dan kedua. Akibat aksi gaya, kecepatan bola akan berubah. Mari kita nyatakan kecepatan bola setelah tumbukan dengan huruf v 1 dan v 2 .
Sesuai dengan hukum ketiga Newton, gaya interaksi antar bola sama besarnya dan arahnya berlawanan:
Menurut hukum kedua Newton, masing-masing gaya ini dapat digantikan dengan produk massa dan percepatan yang diterima masing-masing bola selama interaksi:
m 1 sebuah 1 = -m 2 sebuah 2 .
Percepatan, seperti yang Anda ketahui, ditentukan dari persamaan:

Mengganti gaya percepatan dalam persamaan dengan ekspresi yang sesuai, kita memperoleh:
![]()
Sebagai hasil dari pengurangan kedua ruas persamaan sebesar t, kita memperoleh:
m1(v" 1 - v 1) = -m 2 (v" 2 - v 2).
Mari kita kelompokkan suku-suku persamaan ini sebagai berikut:
m 1 v 1 " + m 2 v 2 " = m 1 v 1 = m 2 v 2 . (1)
Mengingat mv = p, kita menulis persamaan (1) dalam bentuk ini:
P" 1 + P" 2 = P 1 + P 2.(2)
Ruas kiri persamaan (1) dan (2) menyatakan momentum total bola setelah interaksinya, dan ruas kanan menyatakan momentum total sebelum interaksi.
Artinya, meskipun momentum masing-masing bola berubah selama interaksi, jumlah vektor momentum bola setelah interaksi tetap sama seperti sebelum interaksi.
Persamaan (1) dan (2) merupakan representasi matematis dari hukum kekekalan momentum.
Karena mata kuliah ini hanya membahas interaksi benda-benda yang bergerak sepanjang satu garis lurus, untuk menuliskan hukum kekekalan momentum dalam bentuk skalar, cukup satu persamaan yang mencakup proyeksi besaran vektor ke sumbu X:
m 1 v" 1x + m 2 v" 2x = m 1 v 1x + m 2 v 2x.
Pertanyaan
- Apa yang dimaksud dengan impuls suatu benda?
- Apa yang dapat dikatakan tentang arah vektor momentum dan kecepatan suatu benda yang bergerak?
- Ceritakan kepada kami tentang jalannya percobaan yang ditunjukkan pada Gambar 44. Apa yang ditunjukkannya?
- Apa yang dimaksud dengan beberapa benda membentuk sistem tertutup?
- Merumuskan hukum kekekalan momentum.
- Untuk sistem tertutup yang terdiri dari dua benda, tuliskan hukum kekekalan momentum dalam bentuk persamaan yang mencakup massa dan kecepatan benda-benda tersebut. Jelaskan arti setiap simbol dalam persamaan ini.
Latihan 20
- Dua buah mobil mainan yang masing-masing bermassa 0,2 kg, bergerak lurus saling berhadapan. Kecepatan setiap mobil relatif terhadap tanah adalah 0,1 m/s. Apakah vektor impuls mesin sama? modul vektor impuls? Tentukan proyeksi momentum masing-masing mobil pada sumbu X sejajar dengan lintasannya.
- Berapa besar perubahan impuls sebuah mobil bermassa 1 ton (dalam nilai absolut) ketika kecepatannya berubah dari 54 menjadi 72 km/jam?
- Seorang pria duduk di perahu yang bersandar di permukaan danau. Pada titik tertentu dia bangkit dan berjalan dari buritan ke haluan. Apa yang akan terjadi pada perahu itu? Jelaskan fenomena tersebut berdasarkan hukum kekekalan momentum.
- Sebuah gerbong kereta api bermassa 35 ton mendekati gerbong diam bermassa 28 ton yang berdiri pada lintasan yang sama dan secara otomatis berpasangan dengannya. Setelah digandeng, mobil bergerak lurus dengan kecepatan 0,5 m/s. Berapakah kecepatan mobil bermassa 35 ton tersebut sebelum digandeng?
