Quaisquer problemas envolvendo corpos em movimento na mecânica clássica requerem conhecimento do conceito de momento. Este artigo discute esse conceito, fornece uma resposta à questão de para onde o vetor momento do corpo é direcionado e também fornece um exemplo de solução do problema.
Quantidade de movimento
Para descobrir para onde o vetor momento de um corpo está direcionado, você deve primeiro entender seu significado físico. O termo foi explicado pela primeira vez por Isaac Newton, mas é importante notar que o cientista italiano Galileu Galilei já havia utilizado um conceito semelhante em suas obras. Para caracterizar um objeto em movimento, ele introduziu uma quantidade chamada impulso, pressão ou o próprio impulso (impeto em italiano). O mérito de Isaac Newton reside no fato de ter conseguido relacionar essa característica com as forças que atuam sobre o corpo.
Então, inicialmente e mais corretamente, o que a maioria entende por impulso de um corpo é chamado de quantidade de movimento. Na verdade, a fórmula matemática para a quantidade em consideração é escrita na forma:
Aqui m é a massa do corpo, v¯ é sua velocidade. Como pode ser visto na fórmula, não estamos falando de nenhum impulso, existe apenas a velocidade do corpo e sua massa, ou seja, a quantidade de movimento.
É importante notar que esta fórmula não decorre de provas ou expressões matemáticas. Sua ocorrência na física tem caráter exclusivamente intuitivo e cotidiano. Então, qualquer pessoa sabe que se uma mosca e um caminhão se movem na mesma velocidade, será muito mais difícil parar o caminhão, pois ele tem muito mais movimento que um inseto.

A origem do conceito de vetor momento corporal é discutida abaixo.
O impulso da força é a razão para a mudança no momento
Newton foi capaz de conectar a característica introduzida intuitivamente com a segunda lei que leva seu nome.
O impulso de força é uma quantidade física conhecida que é igual ao produto da força externa aplicada a um determinado corpo e a duração de sua ação. Usando a conhecida lei de Newton e assumindo que a força não depende do tempo, podemos chegar à expressão:
F¯ * Δt = m * a¯ * Δt.
Aqui Δt é o tempo de ação da força F, a é a aceleração linear transmitida pela força F a um corpo de massa m. Como se sabe, multiplicar a aceleração de um corpo pelo período de tempo durante o qual ele atua resulta em um aumento na velocidade. Este fato nos permite reescrever a fórmula acima de uma forma ligeiramente diferente:
F¯ * Δt = m * Δv¯, onde Δv¯= a¯ * Δt.
O lado direito da igualdade representa a mudança no momento (veja a expressão no parágrafo anterior). Então acontecerá:
F¯ * Δt = Δp¯, onde Δp¯ = m * Δv¯.
Assim, utilizando a lei de Newton e o conceito de momento, podemos chegar a uma conclusão importante: a influência de uma força externa sobre um objeto durante um período de tempo leva a uma mudança no seu momento.

Agora fica claro por que a quantidade de movimento é geralmente chamada de impulso, porque sua mudança coincide com o impulso da força (a palavra “força” geralmente é omitida).
Quantidade vetorial p¯

Algumas quantidades (F¯, v¯, a¯, p¯) possuem uma barra acima delas. Isso significa que estamos falando de uma característica vetorial. Ou seja, a quantidade de movimento, assim como a velocidade, a força e a aceleração, além do valor absoluto (módulo), também é descrita pela direção.
Como cada vetor pode ser decomposto em componentes individuais, usando o sistema de coordenadas retangulares cartesianas, podemos escrever as seguintes igualdades:
1) p¯ = m * v¯;
2) p x = m * v x ; p y = m * v y ; p z = m * v z ;
3) |p¯| = √(p x 2 + p y 2 + p z 2).
Aqui, a 1ª expressão é uma forma vetorial de representação do momento, o 2º conjunto de fórmulas permite calcular cada uma das componentes do momento p¯, conhecendo as componentes correspondentes da velocidade (os índices x, y, z indicam a projeção de o vetor no eixo de coordenadas correspondente). Finalmente, a 3ª fórmula permite calcular o comprimento do vetor impulso (o valor absoluto da magnitude) através de seus componentes.
Para onde está direcionado o vetor momento do corpo?
Tendo considerado o conceito de momento p¯ e suas propriedades básicas, podemos facilmente responder à questão colocada. O vetor momento do corpo é direcionado da mesma forma que o vetor velocidade linear. Na verdade, sabe-se pela matemática que multiplicar um vetor a¯ por um número k leva à formação de um novo vetor b¯, que possui as seguintes propriedades:
- seu comprimento é igual ao produto do número pelo módulo do vetor original, ou seja, |b¯| = k * |a¯|;
- ele é direcionado da mesma forma que o vetor original se k > 0, caso contrário, será direcionado de forma oposta a a¯.
Neste caso, o papel do vetor a¯ é desempenhado pela velocidade v¯, o momento p¯ é o novo vetor b¯ e o número k é a massa do corpo m. Como esta última é sempre positiva (m>0), então, respondendo à pergunta: qual a direção do vetor quantidade de movimento do corpo p¯, deve-se dizer que ele é codirecionado com a velocidade v¯.
Vetor de mudança de impulso
É interessante considerar outra questão semelhante: para onde está direcionado o vetor de mudança no momento do corpo, ou seja, Δp¯. Para responder isso, você deve usar a fórmula obtida acima:
F¯ * Δt = m * Δv¯ = Δp¯.
Com base no raciocínio do parágrafo anterior, podemos dizer que a direção da mudança no momento Δp¯ coincide com a direção do vetor de força F¯ (Δt > 0) ou com a direção do vetor de mudança de velocidade Δv¯ (m > 0).
É importante aqui não confundir que estamos falando especificamente de mudanças nas quantidades. No caso geral, os vetores p¯ e Δp¯ não coincidem, pois não estão relacionados de forma alguma. Por exemplo, se a força F¯ atua contra a velocidade v¯ do objeto, então p¯ e Δp¯ serão direcionados em direções opostas.
Onde é importante levar em conta a natureza vetorial do momento?

As questões discutidas acima: para onde se dirigem o vetor do momento do corpo e o vetor de sua mudança, não se devem à simples curiosidade. O fato é que a lei da conservação do momento p¯ é satisfeita para cada um dos seus componentes. Ou seja, na sua forma mais completa está escrito da seguinte forma:
p x = m * v x ; p y = m * v y ; p z = m * v z .
Cada componente do vetor p¯ mantém seu valor no sistema de objetos em interação que não são afetados por forças externas (Δp¯ = 0).
Como utilizar esta lei e as representações vetoriais da quantidade p¯ para resolver problemas que envolvem a interação (colisão) de corpos?
Problema com duas bolas
A figura abaixo mostra duas bolas de massas diferentes voando em ângulos diferentes em relação a uma linha horizontal. Sejam as massas das bolas m 1 = 1 kg, m 2 = 0,5 kg, suas velocidades v 1 = 2 m/s, v 2 = 3 m/s. É necessário determinar a direção do impulso após o impacto das bolas, assumindo que esta é absolutamente inelástica.

Ao começar a resolver o problema, você deve escrever a lei da constância do momento em forma vetorial, ou seja:
p 1 ¯ + p 2 ¯ = const.
Como cada componente do momento deve ser conservado, precisamos reescrever esta expressão, levando também em consideração que após a colisão as duas bolas começarão a se mover como um único objeto (impacto absolutamente inelástico):
m 1 * v 1x + m 2 * v 2x = (m 1 + m 2) * você x ;
M 1 * v 1y + m 2 * v 2y = (m 1 + m 2) * você .
O sinal negativo para a projeção do momento do primeiro corpo no eixo y apareceu devido à sua direção contra o vetor selecionado do eixo das ordenadas (ver figura).
Agora você precisa expressar os componentes desconhecidos da velocidade u e, em seguida, substituir os valores conhecidos nas expressões (as projeções correspondentes das velocidades são determinadas multiplicando as magnitudes dos vetores v 1 ¯ e v 2 ¯ por funções trigonométricas ):
você x = (m 1 * v 1x + m 2 * v 2x) / (m 1 + m 2), v 1x = v 1 * cos(45 o); v 2x = v 2 * cos(30 o);
você x = (1 * 2 * 0,7071 + 0,5 * 3 * 0,866) / (1 + 0,5) = 1,8088 m/s;
você y = (-m 1 * v 1y + m 2 * v 2y) / (m 1 + m 2), v 1y = v 1 * sin(45 o); v 2y = v 2 * pecado(30 o);
você y = (-1 * 2 * 0,7071 + 0,5 * 3 * 0,5) / (1 + 0,5) = -0,4428 m/s.
Esses são dois componentes da velocidade do corpo após o impacto e da “aderência” das bolas. Como a direção da velocidade coincide com o vetor momento p¯, a questão do problema pode ser respondida se u¯ for determinado. Seu ângulo em relação ao eixo horizontal será igual ao arco tangente da razão dos componentes você y e você x:
α = arctan(-0,4428 / 1,8088) = -13,756 o.
O sinal negativo indica que o momento (velocidade) após o impacto será direcionado para baixo a partir do eixo x.
Uma bala calibre 22 tem massa de apenas 2 G. Se você jogar essa bala em alguém, ele poderá pegá-la facilmente, mesmo sem luvas. Se você tentar pegar uma bala saindo do cano a uma velocidade de 300 m/s, mesmo as luvas não ajudarão.
Se um carrinho de brinquedo estiver rolando em sua direção, você pode pará-lo com o dedo do pé. Se um caminhão estiver vindo em sua direção, você deve tirar os pés do caminho.


Consideremos um problema que demonstra a conexão entre um impulso de força e uma mudança no momento de um corpo.
Exemplo. A massa da bola é de 400 g, a velocidade que a bola adquiriu após o impacto é de 30 m/s. A força com que o pé atuou sobre a bola foi de 1.500 N e o tempo de impacto foi de 8 ms. Encontre o impulso da força e a mudança no momento do corpo para a bola.

Mudança no impulso corporal
Exemplo. Estime a força média do chão que atua sobre a bola durante o impacto.
1) Durante um golpe, duas forças atuam sobre a bola: força de reação do solo, gravidade.

A força de reação muda durante o tempo de impacto, portanto é possível encontrar a força de reação média do piso.
2) Mudança no impulso  corpo mostrado na foto
corpo mostrado na foto

3) Da segunda lei de Newton

A principal coisa a lembrar
1) Fórmulas para impulso corporal, impulso de força;
2) Direção do vetor impulso;
3) Encontre a mudança no momento do corpo
Derivação da segunda lei de Newton na forma geral

Gráfico F(t). Força variável
O impulso de força é numericamente igual à área da figura sob o gráfico F(t).

Se a força não for constante ao longo do tempo, por exemplo, ela aumenta linearmente F=kt, então o momento dessa força é igual à área do triângulo. Você pode substituir essa força por uma força constante que alterará o momento do corpo na mesma quantidade no mesmo período de tempo.

Força resultante média
LEI DE CONSERVAÇÃO DO MOMENTO
Teste on-line
Sistema fechado de corpos
Este é um sistema de corpos que interagem apenas entre si. Não existem forças externas de interação.
No mundo real, tal sistema não pode existir; não há como remover toda a interação externa. Um sistema fechado de corpos é um modelo físico, assim como um ponto material é um modelo. Este é um modelo de sistema de corpos que supostamente interagem apenas entre si, as forças externas não são levadas em consideração, são negligenciadas.
Lei da conservação do momento
Em um sistema fechado de corpos vetor a soma dos momentos dos corpos não muda quando os corpos interagem. Se o momento de um corpo aumentou, isso significa que naquele momento o momento de algum outro corpo (ou de vários corpos) diminuiu exatamente na mesma proporção.
Vamos considerar este exemplo. Uma menina e um menino estão patinando. Um sistema fechado de corpos - uma menina e um menino (negligenciamos o atrito e outras forças externas). A menina fica parada, seu momento é zero, pois a velocidade é zero (veja a fórmula do momento de um corpo). Depois que um menino que se move a uma certa velocidade colide com uma menina, ela também começa a se mover. Agora seu corpo tem impulso. O valor numérico do momento da menina é exatamente igual à diminuição do momento do menino após a colisão.
Um corpo com massa de 20 kg se move com velocidade, um segundo corpo com massa de 4 kg se move na mesma direção com velocidade de . Quais são os impulsos de cada corpo? Qual é o momento do sistema?


Impulso de um sistema de corposé a soma vetorial dos momentos de todos os corpos incluídos no sistema. No nosso exemplo, esta é a soma de dois vetores (já que são considerados dois corpos) que são direcionados na mesma direção, portanto

Agora vamos calcular o momento do sistema de corpos do exemplo anterior se o segundo corpo se mover na direção oposta.

Como os corpos se movem em direções opostas, obtemos uma soma vetorial de impulsos multidirecionais. Leia mais sobre soma vetorial.
A principal coisa a lembrar
1) O que é um sistema fechado de corpos;
2) A lei da conservação do momento e sua aplicação
Impulso corporal
O momento de um corpo é uma quantidade igual ao produto da massa do corpo e sua velocidade.
Deve-se lembrar que estamos falando de um corpo que pode ser representado como um ponto material. O momento do corpo ($p$) também é chamado de momento. O conceito de momento foi introduzido na física por René Descartes (1596–1650). O termo “impulso” apareceu mais tarde (impulsus em latim significa “empurrar”). O momento é uma grandeza vetorial (como a velocidade) e é expresso pela fórmula:
$p↖(→)=mυ↖(→)$
A direção do vetor momento sempre coincide com a direção da velocidade.
A unidade SI de impulso é o impulso de um corpo com massa de $1$ kg movendo-se a uma velocidade de $1$ m/s; portanto, a unidade de impulso é $1$ kg $·$ m/s.
Se uma força constante atua sobre um corpo (ponto material) durante um período de tempo $∆t$, então a aceleração também será constante:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
onde $(υ_1)↖(→)$ e $(υ_2)↖(→)$ são as velocidades inicial e final do corpo. Substituindo este valor na expressão da segunda lei de Newton, obtemos:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Abrindo os colchetes e usando a expressão para o momento linear do corpo, temos:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Aqui $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ é a mudança no momento ao longo do tempo $∆t$. Então a equação anterior assumirá a forma:
$∆p↖(→)=F↖(→)∆t$
A expressão $∆p↖(→)=F↖(→)∆t$ é uma representação matemática da segunda lei de Newton.
O produto de uma força pela duração de sua ação é chamado impulso de força. É por isso a mudança no momento de um ponto é igual à mudança no momento da força que atua sobre ele.
A expressão $∆p↖(→)=F↖(→)∆t$ é chamada equação do movimento do corpo. Deve-se notar que a mesma ação – uma mudança no momento de um ponto – pode ser alcançada por uma pequena força durante um longo período de tempo e por uma grande força durante um curto período de tempo.
Impulso do sistema tel. Lei da Mudança de Momentum
O impulso (quantidade de movimento) de um sistema mecânico é um vetor igual à soma dos impulsos de todos os pontos materiais deste sistema:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
As leis de mudança e conservação do momento são uma consequência da segunda e terceira leis de Newton.
Consideremos um sistema composto por dois corpos. As forças ($F_(12)$ e $F_(21)$ na figura com as quais os corpos do sistema interagem entre si são chamadas internas.
Deixe, além das forças internas, as forças externas $(F_1)↖(→)$ e $(F_2)↖(→)$ atuarem no sistema. Para cada corpo podemos escrever a equação $∆p↖(→)=F↖(→)∆t$. Somando os lados esquerdo e direito dessas equações, obtemos:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
De acordo com a terceira lei de Newton, $(F_(12))↖(→)=-(F_(21))↖(→)$.
Por isso,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
No lado esquerdo há uma soma geométrica das mudanças nos impulsos de todos os corpos do sistema, igual à mudança no impulso do próprio sistema - $(∆p_(syst))↖(→)$. Levando isso em consideração conta, a igualdade $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ pode ser escrita:
$(∆p_(syst))↖(→)=F↖(→)∆t$
onde $F↖(→)$ é a soma de todas as forças externas que atuam no corpo. O resultado obtido significa que o momento do sistema só pode ser alterado por forças externas, e a mudança no momento do sistema é direcionada da mesma forma que a força externa total. Esta é a essência da lei da mudança no momento de um sistema mecânico.
As forças internas não podem alterar o momento total do sistema. Eles apenas alteram os impulsos dos órgãos individuais do sistema.
Lei da conservação do momento
A lei da conservação do momento segue da equação $(∆p_(syst))↖(→)=F↖(→)∆t$. Se nenhuma força externa atuar no sistema, então o lado direito da equação $(∆p_(syst))↖(→)=F↖(→)∆t$ torna-se zero, o que significa que o momento total do sistema permanece inalterado :
$(∆p_(syst))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Um sistema sobre o qual nenhuma força externa atua ou a resultante das forças externas é zero é chamado fechado.
A lei da conservação do momento afirma:
O momento total de um sistema fechado de corpos permanece constante para qualquer interação dos corpos do sistema entre si.
O resultado obtido é válido para um sistema contendo um número arbitrário de corpos. Se a soma das forças externas não for igual a zero, mas a soma de suas projeções em alguma direção for igual a zero, então a projeção do momento do sistema nessa direção não muda. Assim, por exemplo, um sistema de corpos na superfície da Terra não pode ser considerado fechado devido à força da gravidade atuando sobre todos os corpos, porém, a soma das projeções dos impulsos na direção horizontal pode permanecer inalterada (na ausência de atrito), pois nesta direção a força da gravidade não atua.
Jato-Propulsão
Consideremos exemplos que confirmam a validade da lei da conservação do momento.
Vamos pegar uma bola de borracha infantil, inflá-la e soltá-la. Veremos que quando o ar começar a sair em uma direção, a própria bola voará na outra. O movimento de uma bola é um exemplo de movimento de jato. Isso é explicado pela lei da conservação do momento: o momento total do sistema “bola mais ar dentro dele” antes que o ar saia é zero; deve permanecer igual a zero durante o movimento; portanto, a bola se move na direção oposta à direção do fluxo do jato e a uma velocidade tal que seu momento é igual em magnitude ao momento do jato de ar.
Movimento do jato chame o movimento de um corpo que ocorre quando alguma parte dele é separada dele em qualquer velocidade. Devido à lei da conservação do momento, a direção do movimento do corpo é oposta à direção do movimento da parte separada.
Os voos de foguetes são baseados no princípio da propulsão a jato. Um foguete espacial moderno é uma aeronave muito complexa. A massa do foguete consiste na massa do fluido de trabalho (ou seja, gases quentes formados como resultado da combustão do combustível e emitidos na forma de jato) e na massa final, ou, como se costuma dizer, “seca” de o foguete restante após o fluido de trabalho ser ejetado do foguete.
Quando um jato de gás é ejetado de um foguete em alta velocidade, o próprio foguete avança na direção oposta. De acordo com a lei da conservação do momento, o momento $m_(p)υ_p$ adquirido pelo foguete deve ser igual ao momento $m_(gas)·υ_(gas)$ dos gases ejetados:
$m_(p)υ_p=m_(gás)·υ_(gás)$
Segue-se que a velocidade do foguete
$υ_p=((m_(gás))/(m_p))·υ_(gás)$
A partir desta fórmula fica claro que quanto maior a velocidade do foguete, maior a velocidade dos gases emitidos e a razão entre a massa do fluido de trabalho (ou seja, a massa do combustível) e o final (“seco”) massa do foguete.
A fórmula $υ_p=((m_(gas))/(m_p))·υ_(gas)$ é aproximada. Não leva em conta que à medida que o combustível queima, a massa do foguete voador diminui cada vez mais. A fórmula exata para a velocidade do foguete foi obtida em 1897 por K. E. Tsiolkovsky e leva seu nome.
Trabalho de força
O termo “trabalho” foi introduzido na física em 1826 pelo cientista francês J. Poncelet. Se na vida cotidiana apenas o trabalho humano é chamado de trabalho, então na física e, em particular, na mecânica, é geralmente aceito que o trabalho é executado pela força. A quantidade física de trabalho é geralmente indicada pela letra $A$.
Trabalho de forçaé uma medida da ação de uma força, dependendo de sua magnitude e direção, bem como do movimento do ponto de aplicação da força. Para uma força constante e deslocamento linear, o trabalho é determinado pela igualdade:
$A=F|∆r↖(→)|cosα$
onde $F$ é a força que atua no corpo, $∆r↖(→)$ é o deslocamento, $α$ é o ângulo entre a força e o deslocamento.

O trabalho da força é igual ao produto dos módulos de força e deslocamento e o cosseno do ângulo entre eles, ou seja, o produto escalar dos vetores $F↖(→)$ e $∆r↖(→)$.
O trabalho é uma quantidade escalar. Se $α 0$, e se $90°
Quando várias forças atuam sobre um corpo, o trabalho total (a soma do trabalho de todas as forças) é igual ao trabalho da força resultante.
A unidade de trabalho no SI é joule($1$J). $1$ J é o trabalho realizado por uma força de $1$ N ao longo de uma trajetória de $1$ m na direção de ação dessa força. Esta unidade recebeu o nome do cientista inglês J. Joule (1818-1889): $1$ J = $1$ N $·$ m. Quilojoules e milijoules também são frequentemente usados: $1$ kJ $= 1.000$ J, $1$ mJ $ = $ 0,001 J.
Trabalho de gravidade
Consideremos um corpo deslizando ao longo de um plano inclinado com ângulo de inclinação $α$ e altura $H$.

Vamos expressar $∆x$ em termos de $H$ e $α$:
$∆x=(H)/(sinα)$
Considerando que a força da gravidade $F_т=mg$ forma um ângulo ($90° - α$) com a direção do movimento, usando a fórmula $∆x=(H)/(sin)α$, obtemos uma expressão para a trabalho da gravidade $A_g$:
$A_g=mg cos(90°-α) (H)/(sinα)=mgH$
A partir desta fórmula fica claro que o trabalho realizado pela gravidade depende da altura e não depende do ângulo de inclinação do plano.
Segue que:
- o trabalho da gravidade não depende do formato da trajetória ao longo da qual o corpo se move, mas apenas da posição inicial e final do corpo;
- quando um corpo se move ao longo de uma trajetória fechada, o trabalho realizado pela gravidade é zero, ou seja, a gravidade é uma força conservativa (as forças que possuem essa propriedade são chamadas de conservadoras).
Trabalho das forças de reação, é igual a zero, pois a força de reação ($N$) é direcionada perpendicularmente ao deslocamento $∆x$.
Trabalho da força de atrito
A força de atrito tem direção oposta ao deslocamento $∆x$ e forma um ângulo de $180°$ com ele, portanto o trabalho da força de atrito é negativo:
$A_(tr)=F_(tr)∆x·cos180°=-F_(tr)·∆x$
Como $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ então
$A_(tr)=μmgHctgα$
Trabalho de força elástica
Deixe uma força externa $F↖(→)$ atuar sobre uma mola não esticada de comprimento $l_0$, esticando-a em $∆l_0=x_0$. Na posição $x=x_0F_(controle)=kx_0$. Depois que a força $F↖(→)$ deixa de atuar no ponto $x_0$, a mola é comprimida sob a ação da força $F_(control)$.

Vamos determinar o trabalho da força elástica quando a coordenada da extremidade direita da mola muda de $x_0$ para $x$. Como a força elástica nesta área muda linearmente, a lei de Hooke pode usar o seu valor médio nesta área:
$F_(controle av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Então o trabalho (levando em consideração o fato de que as direções $(F_(control av.))↖(→)$ e $(∆x)↖(→)$ coincidem) é igual a:
$A_(controle)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Pode-se mostrar que a forma da última fórmula não depende do ângulo entre $(F_(control av.))↖(→)$ e $(∆x)↖(→)$. O trabalho das forças elásticas depende apenas das deformações da mola nos estados inicial e final.
Assim, a força elástica, como a força da gravidade, é uma força conservativa.
Poder de poder
A potência é uma quantidade física medida pela razão entre o trabalho e o período de tempo durante o qual é produzido.
Em outras palavras, a potência mostra quanto trabalho é realizado por unidade de tempo (no SI - por $1$ s).
A potência é determinada pela fórmula:
onde $N$ é potência, $A$ é o trabalho realizado durante o tempo $∆t$.
Substituindo na fórmula $N=(A)/(∆t)$ em vez do trabalho $A$ sua expressão $A=F|(∆r)↖(→)|cosα$, obtemos:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
A potência é igual ao produto das magnitudes dos vetores força e velocidade e o cosseno do ângulo entre esses vetores.
A potência no sistema SI é medida em watts (W). Um watt ($1$ W) é a potência na qual $1$ J de trabalho é realizado por $1$ s: $1$ W $= 1$ J/s.
Esta unidade leva o nome do inventor inglês J. Watt (Watt), que construiu a primeira máquina a vapor. O próprio J. Watt (1736-1819) usou outra unidade de potência - cavalo-vapor (hp), que introduziu para poder comparar o desempenho de uma máquina a vapor e de um cavalo: $1$ hp. $= 735,5$ W.
Em tecnologia, unidades de energia maiores são frequentemente usadas - quilowatts e megawatts: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
Energia cinética. Lei da mudança da energia cinética
Se um corpo ou vários corpos em interação (um sistema de corpos) podem realizar trabalho, então diz-se que eles têm energia.
A palavra “energia” (do grego energia - ação, atividade) é frequentemente usada na vida cotidiana. Por exemplo, pessoas que conseguem trabalhar rapidamente são chamadas de enérgicas, tendo grande energia.
A energia possuída por um corpo devido ao movimento é chamada de energia cinética.
Como no caso da definição de energia em geral, podemos dizer sobre a energia cinética que a energia cinética é a capacidade de um corpo em movimento realizar trabalho.
Vamos encontrar a energia cinética de um corpo de massa $m$ movendo-se com uma velocidade $υ$. Como a energia cinética é a energia devida ao movimento, seu estado zero é o estado em que o corpo está em repouso. Tendo encontrado o trabalho necessário para transmitir uma determinada velocidade a um corpo, encontraremos a sua energia cinética.
Para fazer isso, vamos calcular o trabalho na área de deslocamento $∆r↖(→)$ quando as direções dos vetores de força $F↖(→)$ e deslocamento $∆r↖(→)$ coincidem. Neste caso o trabalho é igual
onde $∆x=∆r$

Para o movimento de um ponto com aceleração $α=const$, a expressão para deslocamento tem a forma:
$∆x=υ_1t+(em^2)/(2),$
onde $υ_1$ é a velocidade inicial.
Substituindo na equação $A=F·∆x$ a expressão para $∆x$ de $∆x=υ_1t+(at^2)/(2)$ e usando a segunda lei de Newton $F=ma$, obtemos:
$A=ma(υ_1t+(em^2)/(2))=(mat)/(2)(2υ_1+em)$
Expressando a aceleração através das velocidades inicial $υ_1$ e final $υ_2$ $a=(υ_2-υ_1)/(t)$ e substituindo $A=ma(υ_1t+(at^2)/(2))=(mat )/ (2)(2υ_1+at)$ temos:
$UMA=(m(υ_2-υ_1))/(2)·(2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Agora igualando a velocidade inicial a zero: $υ_1=0$, obtemos uma expressão para energia cinética:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Assim, um corpo em movimento possui energia cinética. Essa energia é igual ao trabalho que deve ser realizado para aumentar a velocidade do corpo de zero até o valor $υ$.
De $E_K=(mυ)/(2)=(p^2)/(2m)$ segue-se que o trabalho realizado por uma força para mover um corpo de uma posição para outra é igual à mudança na energia cinética:
$A=E_(K_2)-E_(K_1)=∆E_K$
A igualdade $A=E_(K_2)-E_(K_1)=∆E_K$ expressa teorema sobre a mudança na energia cinética.
Mudança na energia cinética do corpo(ponto material) por um determinado período de tempo é igual ao trabalho realizado durante esse tempo pela força que atua sobre o corpo.
Energia potencial
Energia potencial é a energia determinada pela posição relativa de corpos em interação ou partes do mesmo corpo.
Como a energia é definida como a capacidade de um corpo realizar trabalho, a energia potencial é naturalmente definida como o trabalho realizado por uma força, dependendo apenas da posição relativa dos corpos. Este é o trabalho da gravidade $A=mgh_1-mgh_2=mgH$ e o trabalho da elasticidade:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Energia potencial do corpo interagindo com a Terra, eles chamam uma quantidade igual ao produto da massa $m$ deste corpo pela aceleração da queda livre $g$ e a altura $h$ do corpo acima da superfície da Terra:
A energia potencial de um corpo elasticamente deformado é um valor igual à metade do produto do coeficiente de elasticidade (rigidez) $k$ do corpo e a deformação quadrada $∆l$:
$E_p=(1)/(2)k∆l^2$
O trabalho das forças conservativas (gravidade e elasticidade), levando em consideração $E_p=mgh$ e $E_p=(1)/(2)k∆l^2$, é expresso da seguinte forma:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Esta fórmula permite-nos dar uma definição geral de energia potencial.
A energia potencial de um sistema é uma quantidade que depende da posição dos corpos, cuja mudança durante a transição do sistema do estado inicial para o estado final é igual ao trabalho das forças conservativas internas do sistema, tomado com o sinal oposto.
O sinal de menos no lado direito da equação $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ significa que quando o trabalho é realizado por forças internas ( por exemplo, uma queda de corpos no solo sob a influência da gravidade no sistema “rocha-Terra”), a energia do sistema diminui. O trabalho e as mudanças na energia potencial em um sistema sempre têm sinais opostos.
Visto que o trabalho determina apenas uma mudança na energia potencial, então apenas uma mudança na energia tem um significado físico na mecânica. Portanto, a escolha do nível de energia zero é arbitrária e determinada unicamente por considerações de conveniência, por exemplo, a facilidade de escrever as equações correspondentes.
Lei da mudança e conservação da energia mecânica
Energia mecânica total do sistema a soma de suas energias cinética e potencial é chamada:
É determinado pela posição dos corpos (energia potencial) e pela sua velocidade (energia cinética).
De acordo com o teorema da energia cinética,
$E_k-E_(k_1)=A_p+A_(pr),$
onde $A_p$ é o trabalho das forças potenciais, $A_(pr)$ é o trabalho das forças não potenciais.
Por sua vez, o trabalho das forças potenciais é igual à diferença na energia potencial do corpo nos estados inicial $E_(p_1)$ e final $E_p$. Levando isso em consideração, obtemos uma expressão para lei da mudança da energia mecânica:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
onde o lado esquerdo da igualdade é a variação da energia mecânica total e o lado direito é o trabalho de forças não potenciais.
Então, lei da mudança da energia mecânica lê:
A mudança na energia mecânica do sistema é igual ao trabalho de todas as forças não potenciais.
Um sistema mecânico no qual atuam apenas forças potenciais é denominado conservador.
Num sistema conservador $A_(pr) = 0$. isso implica lei da conservação da energia mecânica:
Num sistema conservador fechado, a energia mecânica total é conservada (não muda com o tempo):
$E_k+E_p=E_(k_1)+E_(p_1)$
A lei da conservação da energia mecânica é derivada das leis da mecânica de Newton, que são aplicáveis a um sistema de pontos materiais (ou macropartículas).
Contudo, a lei da conservação da energia mecânica também é válida para um sistema de micropartículas, onde as próprias leis de Newton já não se aplicam.
A lei da conservação da energia mecânica é consequência da uniformidade do tempo.
Uniformidade de tempoé que, nas mesmas condições iniciais, a ocorrência de processos físicos não depende do momento em que essas condições são criadas.
A lei da conservação da energia mecânica total significa que quando a energia cinética num sistema conservativo muda, a sua energia potencial também deve mudar, para que a sua soma permaneça constante. Isso significa a possibilidade de converter um tipo de energia em outro.
De acordo com as diversas formas de movimento da matéria, são considerados vários tipos de energia: mecânica, interna (igual à soma da energia cinética do movimento caótico das moléculas em relação ao centro de massa do corpo e da energia potencial de interação das moléculas entre si), eletromagnética, química (que consiste na energia cinética do movimento dos elétrons e elétrica na energia de sua interação entre si e com os núcleos atômicos), nuclear, etc. a divisão da energia em diferentes tipos é bastante arbitrária.
Os fenômenos naturais costumam ser acompanhados pela transformação de um tipo de energia em outro. Por exemplo, o atrito de partes de vários mecanismos leva à conversão de energia mecânica em calor, ou seja, energia interna. Nas máquinas térmicas, ao contrário, a energia interna é convertida em energia mecânica; nas células galvânicas, a energia química é convertida em energia elétrica, etc.
Atualmente, o conceito de energia é um dos conceitos básicos da física. Este conceito está intimamente ligado à ideia da transformação de uma forma de movimento em outra.
É assim que o conceito de energia é formulado na física moderna:
A energia é uma medida quantitativa geral de movimento e interação de todos os tipos de matéria. A energia não surge do nada e não desaparece, ela só pode passar de uma forma para outra. O conceito de energia une todos os fenômenos naturais.
Mecanismos simples. Eficiência do mecanismo
Mecanismos simples são dispositivos que alteram a magnitude ou direção das forças aplicadas a um corpo.
Eles são usados para mover ou levantar grandes cargas com pouco esforço. Estes incluem uma alavanca e suas variedades - blocos (móveis e fixos), portões, planos inclinados e suas variedades - cunha, parafuso, etc.
Braço de alavanca. Regra de alavancagem
Uma alavanca é um corpo rígido capaz de girar em torno de um suporte fixo.

A regra da alavancagem diz:
Uma alavanca está em equilíbrio se as forças aplicadas a ela são inversamente proporcionais aos seus braços:
$(F_2)/(F_1)=(l_1)/(l_2)$
A partir da fórmula $(F_2)/(F_1)=(l_1)/(l_2)$, aplicando-lhe a propriedade da proporção (o produto dos termos extremos de uma proporção é igual ao produto dos seus termos médios), obtemos podemos obter a seguinte fórmula:
Mas $F_1l_1=M_1$ é o momento da força que tende a girar a alavanca no sentido horário, e $F_2l_2=M_2$ é o momento da força que tenta girar a alavanca no sentido anti-horário. Assim, $M_1=M_2$, que é o que precisava ser provado.
A alavanca começou a ser usada pelas pessoas na antiguidade. Com sua ajuda, foi possível levantar pesadas lajes de pedra durante a construção das pirâmides do Antigo Egito. Sem alavancagem isso não seria possível. Afinal, por exemplo, para a construção da pirâmide de Quéops, que tem uma altura de $147$ m, foram utilizados mais de dois milhões de blocos de pedra, o menor dos quais pesava $2,5$ toneladas!
Hoje em dia, as alavancas são amplamente utilizadas tanto na produção (por exemplo, guindastes) quanto na vida cotidiana (tesouras, alicates, balanças).
Bloco fixo
A ação de um bloco fixo é semelhante à ação de uma alavanca com braços iguais: $l_1=l_2=r$. A força aplicada $F_1$ é igual à carga $F_2$, e a condição de equilíbrio é:
Bloco fixo usado quando você precisa mudar a direção de uma força sem alterar sua magnitude.
Bloco móvel
O bloco móvel atua de forma semelhante a uma alavanca, cujos braços são: $l_2=(l_1)/(2)=r$. Neste caso, a condição de equilíbrio tem a forma:
onde $F_1$ é a força aplicada, $F_2$ é a carga. O uso de um bloco móvel proporciona um duplo ganho de força.
Talha de polia (sistema de bloco)

Uma talha de corrente convencional consiste em $n$ blocos móveis e $n$ fixos. Usá-lo dá um ganho de força de $2n$ vezes:
$F_1=(F_2)/(2n)$
Talha de corrente elétrica consiste em n blocos móveis e um bloco fixo. O uso de uma polia motorizada proporciona um ganho de resistência de $ 2 ^ n $ vezes:
$F_1=(F_2)/(2^n)$

Parafuso
Um parafuso é um plano inclinado enrolado em torno de um eixo.
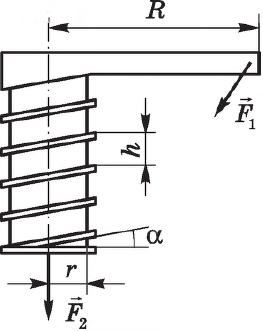
A condição de equilíbrio para as forças que atuam na hélice tem a forma:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

onde $F_1$ é a força externa aplicada à hélice e atuando a uma distância $R$ do seu eixo; $F_2$ é a força que atua na direção do eixo da hélice; $h$ — passo da hélice; $r$ é o raio médio da rosca; $α$ é o ângulo de inclinação do fio. $R$ é o comprimento da alavanca (chave) girando o parafuso com uma força de $F_1$.
Eficiência
O coeficiente de eficiência (eficiência) é a razão entre o trabalho útil e todo o trabalho despendido.
A eficiência é frequentemente expressa como uma percentagem e é denotada pela letra grega $η$ (“isto”):
$η=(A_p)/(A_3)·100%$
onde $A_n$ é trabalho útil, $A_3$ é todo trabalho gasto.
O trabalho útil sempre constitui apenas uma parte do trabalho total que uma pessoa despende usando um ou outro mecanismo.
Parte do trabalho realizado é gasto na superação das forças de atrito. Como $A_3 > A_n$, a eficiência é sempre menor que $1$ (ou $< 100%$).
Como cada um dos trabalhos nesta igualdade pode ser expresso como um produto da força correspondente e da distância percorrida, ela pode ser reescrita da seguinte forma: $F_1s_1≈F_2s_2$.
Segue que, vencendo com a ajuda de um mecanismo em vigor, perdemos o mesmo número de vezes no caminho e vice-versa. Esta lei é chamada de regra de ouro da mecânica.
A regra de ouro da mecânica é uma lei aproximada, pois não leva em consideração o trabalho de superação do atrito e da gravidade das partes dos dispositivos utilizados. No entanto, pode ser muito útil na análise do funcionamento de qualquer mecanismo simples.

Assim, por exemplo, graças a esta regra, podemos dizer imediatamente que o trabalhador mostrado na figura, com um ganho duplo na força de levantamento da carga em $10$ cm, terá que abaixar a extremidade oposta da alavanca em $20 $cm.
Colisão de corpos. Impactos elásticos e inelásticos
As leis de conservação do momento e da energia mecânica são utilizadas para resolver o problema do movimento dos corpos após uma colisão: a partir dos impulsos e energias conhecidos antes da colisão, são determinados os valores dessas quantidades após a colisão. Consideremos os casos de impactos elásticos e inelásticos.
Um impacto é denominado absolutamente inelástico, após o qual os corpos formam um único corpo movendo-se a uma determinada velocidade. O problema da velocidade deste último é resolvido usando a lei da conservação do momento de um sistema de corpos com massas $m_1$ e $m_2$ (se estivermos falando de dois corpos) antes e depois do impacto:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
É óbvio que a energia cinética dos corpos durante um impacto inelástico não é conservada (por exemplo, para $(υ_1)↖(→)=-(υ_2)↖(→)$ e $m_1=m_2$ torna-se igual a zero após o impacto).
Um impacto no qual não apenas a soma dos impulsos é conservada, mas também a soma das energias cinéticas dos corpos impactantes é denominado absolutamente elástico.
Para um impacto absolutamente elástico, as seguintes equações são válidas:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2 )^2)/(2)$
onde $m_1, m_2$ são as massas das bolas, $υ_1, υ_2$ são as velocidades das bolas antes do impacto, $υ"_1, υ"_2$ são as velocidades das bolas após o impacto.
Tendo estudado as leis de Newton, vemos que com a ajuda delas é possível resolver os problemas básicos da mecânica se conhecermos todas as forças que atuam sobre o corpo. Existem situações em que é difícil ou mesmo impossível determinar estes valores. Consideremos várias dessas situações.Quando duas bolas de bilhar ou dois carros colidem, podemos afirmar sobre as forças em ação que esta é a sua natureza; aqui atuam forças elásticas. No entanto, não seremos capazes de determinar com precisão nem os seus módulos nem as suas direções, especialmente porque estas forças têm uma duração de ação extremamente curta.Com o movimento dos foguetes e dos aviões a jato, pouco podemos dizer sobre as forças que colocam esses corpos em movimento.Nesses casos, são utilizados métodos que permitem evitar a resolução das equações de movimento e utilizar imediatamente as consequências dessas equações. Neste caso, novas grandezas físicas são introduzidas. Vamos considerar uma dessas quantidades, chamada de momento do corpo
Uma flecha disparada de um arco. Quanto mais tempo durar o contato da corda com a flecha (∆t), maior será a mudança no momento da flecha (∆) e, portanto, maior será sua velocidade final.
Duas bolas colidindo. Enquanto as bolas estão em contacto, elas agem umas sobre as outras com forças iguais em magnitude, como nos ensina a terceira lei de Newton. Isto significa que as variações nos seus momentos também devem ser iguais em magnitude, mesmo que as massas das bolas não sejam iguais.
Depois de analisar as fórmulas, duas conclusões importantes podem ser tiradas:
1. Forças idênticas agindo durante o mesmo período de tempo causam as mesmas mudanças no momento em corpos diferentes, independentemente da massa destes últimos.
2. A mesma mudança no momento de um corpo pode ser alcançada agindo com uma pequena força durante um longo período de tempo ou agindo brevemente com uma grande força sobre o mesmo corpo.
De acordo com a segunda lei de Newton, podemos escrever:
∆t = ∆ = ∆ / ∆t
A razão entre a mudança no momento de um corpo e o período de tempo durante o qual essa mudança ocorreu é igual à soma das forças que atuam no corpo.
Depois de analisar esta equação, vemos que a segunda lei de Newton nos permite expandir a classe de problemas a serem resolvidos e incluir problemas em que a massa dos corpos muda ao longo do tempo.
Se tentarmos resolver problemas com massa variável de corpos usando a formulação usual da segunda lei de Newton:
então, tentar tal solução levaria a um erro.
Um exemplo disso é o já citado avião a jato ou foguete espacial, que queima combustível em movimento, e os produtos dessa combustão são liberados no espaço circundante. Naturalmente, a massa de uma aeronave ou foguete diminui à medida que o combustível é consumido.
Apesar de a segunda lei de Newton na forma “a força resultante ser igual ao produto da massa de um corpo e sua aceleração” nos permitir resolver uma classe bastante ampla de problemas, existem casos de movimento de corpos que não podem ser totalmente descrito por esta equação. Nesses casos, é necessário aplicar outra formulação da segunda lei, relacionando a mudança no momento do corpo com o impulso da força resultante. Além disso, existem vários problemas nos quais resolver as equações de movimento é matematicamente extremamente difícil ou mesmo impossível. Nesses casos, é útil usarmos o conceito de momento.
Usando a lei da conservação do momento e a relação entre o momento de uma força e o momento de um corpo, podemos derivar a segunda e a terceira leis de Newton.
A segunda lei de Newton é derivada da relação entre o impulso de uma força e o momento de um corpo.
O impulso da força é igual à mudança no momento do corpo:

Feitas as devidas transferências, obtemos a dependência da força com a aceleração, pois a aceleração é definida como a razão entre a mudança na velocidade e o tempo durante o qual essa mudança ocorreu:

Substituindo os valores em nossa fórmula, obtemos a fórmula da segunda lei de Newton:
![]()
Para derivar a terceira lei de Newton, precisamos da lei da conservação do momento.
Os vetores enfatizam a natureza vetorial da velocidade, ou seja, o fato de que a velocidade pode mudar de direção. Após as transformações obtemos:

Como o período de tempo em sistema fechado era um valor constante para ambos os corpos, podemos escrever:

Obtivemos a terceira lei de Newton: dois corpos interagem entre si com forças iguais em magnitude e direções opostas. Os vetores dessas forças são direcionados entre si, respectivamente, os módulos dessas forças são iguais em valor.
Bibliografia
- Tikhomirova S.A., Yavorsky B.M. Física (nível básico) - M.: Mnemosyne, 2012.
- Gendenshtein L.E., Dick Yu.I. Física 10º ano. - M.: Mnemósine, 2014.
- Kikoin I.K., Kikoin A.K. Física - 9, Moscou, Educação, 1990.
Trabalho de casa
- Defina o impulso de um corpo, o impulso da força.
- Como o impulso de um corpo está relacionado ao impulso da força?
- Que conclusões podem ser tiradas das fórmulas para impulso corporal e impulso de força?
- Portal da Internet Questions-physics.ru ().
- Portal da Internet Frutmrut.ru ().
- Portal da Internet Fizmat.by ().
As leis de Newton permitem resolver vários problemas praticamente importantes relativos à interação e ao movimento dos corpos. Um grande número de tais problemas está associado, por exemplo, a encontrar a aceleração de um corpo em movimento se todas as forças que atuam sobre esse corpo forem conhecidas. E então outras quantidades (velocidade instantânea, deslocamento, etc.) são determinadas pela aceleração.
Mas muitas vezes é muito difícil determinar as forças que atuam sobre um corpo. Portanto, para resolver muitos problemas, outra quantidade física importante é usada - o momento do corpo.
- O momento de um corpo p é uma grandeza física vetorial igual ao produto da massa do corpo e sua velocidade
O momento é uma grandeza vetorial. A direção do vetor momento do corpo sempre coincide com a direção do vetor velocidade do movimento.
A unidade SI de impulso é o impulso de um corpo pesando 1 kg movendo-se a uma velocidade de 1 m/s. Isso significa que a unidade SI de momento de um corpo é 1 kg m/s.
Ao fazer cálculos, use a equação para projeções de vetores: р x = mv x.
Dependendo da direção do vetor velocidade em relação ao eixo X selecionado, a projeção do vetor momento pode ser positiva ou negativa.
A palavra “impulso” (impulsus) traduzida do latim significa “empurrar”. Alguns livros usam o termo “momento” em vez do termo “impulso”.
Essa quantidade foi introduzida na ciência aproximadamente no mesmo período em que Newton descobriu as leis que mais tarde receberam seu nome (ou seja, no final do século XVII).
Quando os corpos interagem, seus impulsos podem mudar. Isto pode ser verificado por uma experiência simples.
Duas bolas de massa igual estão suspensas em laços de linha de uma régua de madeira montada em um anel de tripé, conforme mostrado na Figura 44, a.
Arroz. 44. Demonstração da lei da conservação do momento
A bola 2 é desviada da vertical por um ângulo a (Fig. 44, b) e liberada. Voltando à posição anterior, ele acerta a bola 1 e para. Neste caso, a bola 1 começa a se mover e se desvia no mesmo ângulo a (Fig. 44, c).
Neste caso, é óbvio que como resultado da interação das bolas, o momento de cada uma delas mudou: quanto o momento da bola 2 diminuiu, o momento da bola 1 aumentou na mesma proporção.
Se dois ou mais corpos interagem apenas entre si (ou seja, não estão expostos a forças externas), então esses corpos formam um sistema fechado.
O momento de cada um dos corpos incluídos em um sistema fechado pode mudar como resultado da interação entre eles. Mas
- a soma vetorial dos impulsos dos corpos que compõem um sistema fechado não muda ao longo do tempo para quaisquer movimentos e interações desses corpos
Esta é a lei da conservação do momento.
A lei da conservação do momento também é satisfeita se os corpos do sistema sofrerem a ação de forças externas cuja soma vetorial seja igual a zero. Vamos mostrar isso usando a segunda e a terceira leis de Newton para derivar a lei da conservação do momento. Para simplificar, consideremos um sistema que consiste em apenas dois corpos - bolas de massas m 1 e m 2, que se movem retilíneas uma em direção à outra com velocidades v 1 e v 2 (Fig. 45).

Arroz. 45. Um sistema de dois corpos - bolas movendo-se em linha reta uma em direção à outra
As forças da gravidade que atuam sobre cada uma das bolas são equilibradas pelas forças elásticas da superfície sobre a qual elas rolam. Isto significa que a ação destas forças pode ser ignorada. As forças de resistência ao movimento, neste caso, são pequenas, por isso também não levaremos em consideração a sua influência. Assim, podemos assumir que as bolas interagem apenas entre si.
Na Figura 45 pode-se observar que depois de algum tempo as bolas irão colidir. Durante uma colisão que dura um período de tempo muito curto t, surgirão forças de interação F 1 e F 2, aplicadas respectivamente à primeira e à segunda bola. Como resultado da ação das forças, a velocidade das bolas mudará. Vamos denotar as velocidades das bolas após a colisão pelas letras v 1 e v 2 .
De acordo com a terceira lei de Newton, as forças de interação entre as bolas são iguais em magnitude e direcionadas em direções opostas:
De acordo com a segunda lei de Newton, cada uma dessas forças pode ser substituída pelo produto da massa e da aceleração recebida por cada uma das bolas durante a interação:
m 1 a 1 = -m 2 a 2 .
As acelerações, como você sabe, são determinadas a partir das igualdades:

Substituindo as forças de aceleração na equação pelas expressões correspondentes, obtemos:
![]()
Como resultado da redução de ambos os lados da igualdade por t, obtemos:
m1(v" 1 - v 1) = -m 2 (v" 2 - v 2).
Vamos agrupar os termos desta equação da seguinte forma:
m 1 v 1 " + m 2 v 2 " = m 1 v 1 = m 2 v 2 . (1)
Considerando que mv = p, escrevemos a equação (1) desta forma:
P" 1 + P" 2 = P 1 + P 2.(2)
Os lados esquerdos das equações (1) e (2) representam o momento total das bolas após sua interação, e os lados direitos representam o impulso total antes da interação.
Isso significa que, apesar do momento de cada uma das bolas ter mudado durante a interação, a soma vetorial de seu momento após a interação permaneceu a mesma de antes da interação.
As equações (1) e (2) são uma representação matemática da lei da conservação do momento.
Como este curso considera apenas as interações de corpos que se movem ao longo de uma linha reta, para escrever a lei da conservação do momento na forma escalar, é suficiente uma equação, que inclui projeções de grandezas vetoriais no eixo X:
m 1 v" 1x + m 2 v" 2x = m 1 v 1x + m 2 v 2x.
Questões
- Qual é o impulso de um corpo?
- O que pode ser dito sobre as direções dos vetores momento e a velocidade de um corpo em movimento?
- Conte-nos sobre o curso do experimento representado na Figura 44. O que isso indica?
- O que significa dizer que vários corpos formam um sistema fechado?
- Formule a lei da conservação do momento.
- Para um sistema fechado constituído por dois corpos, escreva a lei da conservação do momento na forma de uma equação que inclua as massas e velocidades desses corpos. Explique o que significa cada símbolo nesta equação.
Exercício 20
- Dois carrinhos de brinquedo, cada um pesando 0,2 kg, movem-se em linha reta um em direção ao outro. A velocidade de cada carro em relação ao solo é de 0,1 m/s. Os vetores de impulso das máquinas são iguais? módulos de vetor de impulso? Determine a projeção do momento linear de cada um dos carros no eixo X, paralelo à sua trajetória.
- Quanto mudará (em valor absoluto) o impulso de um carro de 1 tonelada quando sua velocidade mudar de 54 para 72 km/h?
- Um homem está sentado em um barco na superfície de um lago. A certa altura ele se levanta e vai da popa até a proa. O que acontecerá com o barco? Explique o fenômeno com base na lei da conservação do momento.
- Um vagão pesando 35 toneladas se aproxima de um vagão parado pesando 28 toneladas no mesmo trilho e acopla-se automaticamente a ele. Após o acoplamento, os carros se movem em linha reta a uma velocidade de 0,5 m/s. Qual era a velocidade do carro de 35 toneladas antes do engate?
