Tópicos do codificador USE: quantidade de movimento de um corpo, quantidade de movimento de um sistema de corpos, lei da conservação da quantidade de movimento.
Pulso corpo é uma quantidade vetorial igual ao produto da massa do corpo e sua velocidade:
Não há unidades especiais para medir o momento. A dimensão do momento é simplesmente o produto da dimensão da massa pela dimensão da velocidade:
Por que o conceito de momento é interessante? Acontece que ele pode ser usado para dar à segunda lei de Newton uma forma ligeiramente diferente, também extremamente útil.
A segunda lei de Newton na forma impulsiva
Let Ser a resultante das forças aplicadas ao corpo de massa . Começamos com a notação usual da segunda lei de Newton:
Dado que a aceleração do corpo é igual à derivada do vetor velocidade, a segunda lei de Newton é reescrita da seguinte forma:
Introduzimos uma constante sob o sinal da derivada:
Como você pode ver, a derivada do momento é obtida no lado esquerdo:
. ( 1 )
A relação ( 1 ) é uma nova forma da segunda lei de Newton.
A segunda lei de Newton na forma impulsiva. A derivada do momento de um corpo é a resultante das forças aplicadas ao corpo.
Também podemos dizer o seguinte: a força resultante que atua sobre o corpo é igual à taxa de variação do momento do corpo.
A derivada na fórmula (1) pode ser substituída pela razão dos incrementos finais:
. ( 2 )
Neste caso, há uma força média agindo sobre o corpo durante o intervalo de tempo. Quanto menor o valor , mais próxima a relação da derivada e mais próxima a força média de seu valor instantâneo em um determinado momento.
Nas tarefas, via de regra, o intervalo de tempo é bem pequeno. Por exemplo, pode ser o tempo de impacto da bola com a parede, e então - a força média que atua na bola do lado da parede durante o impacto.
O vetor do lado esquerdo da relação ( 2 ) é chamado mudança de impulso durante . A mudança de momento é a diferença entre os vetores de momento final e inicial. Ou seja, se é o momento do corpo em algum momento inicial de tempo, é o momento do corpo após um período de tempo , então a mudança no momento é a diferença:
Enfatizamos mais uma vez que a mudança no momento é a diferença de vetores (Fig. 1):
Vamos, por exemplo, a bola voar perpendicularmente à parede (o momento antes do impacto é ) e ricochetear de volta sem perda de velocidade (o momento após o impacto é ). Apesar do fato de que o momento do módulo não mudou (), há uma mudança no momento:
Geometricamente, esta situação é mostrada na Fig. 2:
O módulo de mudança no momento, como vemos, é igual a duas vezes o módulo do momento inicial da bola: .
Vamos reescrever a fórmula ( 2 ) da seguinte forma:
, ( 3 )
ou, escrevendo a mudança de momento como acima:
O valor é chamado impulso de força. Não há unidade de medida especial para o impulso de força; a dimensão do impulso de força é simplesmente o produto das dimensões de força e tempo:
(Observe que é outra unidade de medida possível para o momento do corpo.)
A formulação verbal da igualdade ( 3 ) é a seguinte: a variação da quantidade de movimento do corpo é igual à quantidade de movimento da força que atua sobre o corpo por um determinado período de tempo. Esta, é claro, é novamente a segunda lei de Newton na forma impulsiva.
Exemplo de cálculo de força
Como exemplo de aplicação da segunda lei de Newton na forma impulsiva, vamos considerar o seguinte problema.
Uma tarefa.
Uma bola de massa r, voando horizontalmente com velocidade de m/s, atinge uma parede vertical lisa e ricocheteia sem perda de velocidade. O ângulo de incidência da bola (ou seja, o ângulo entre a direção da bola e a perpendicular à parede) é . O golpe dura s. Encontre a força média
agindo sobre a bola durante o impacto.
Solução. Em primeiro lugar, mostraremos que o ângulo de reflexão é igual ao ângulo de incidência, ou seja, a bola rebaterá na parede no mesmo ângulo (Fig. 3).
De acordo com (3) temos: . Segue que o vetor de mudança de momento co-dirigido com vetor , ou seja, direcionado perpendicularmente à parede em direção ao rebote da bola (Fig. 5).
 |
| Arroz. 5. Para a tarefa |
Vetores e
igual em módulo
(porque a velocidade da bola não mudou). Portanto, o triângulo formado pelos vetores , e , é isósceles. Isso significa que o ângulo entre os vetores e é igual a , ou seja, o ângulo de reflexão é de fato igual ao ângulo de incidência.
Agora observe, além disso, que nosso triângulo isósceles tem um ângulo (este é o ângulo de incidência); então esse triângulo é equilátero. Daqui:
E então a força média desejada atuando na bola:
Impulso do sistema do corpo
Vamos começar com uma situação simples de um sistema de dois corpos. Ou seja, seja o corpo 1 e o corpo 2 com momentos e respectivamente. O impulso do sistema de dados do corpo é a soma vetorial dos impulsos de cada corpo:
Acontece que para o momento de um sistema de corpos existe uma fórmula semelhante à segunda lei de Newton na forma (1). Vamos derivar esta fórmula.
Todos os outros objetos com os quais os corpos 1 e 2 interagem, chamaremos corpos externos. As forças com as quais os corpos externos agem sobre os corpos 1 e 2 são chamadas forças externas. Seja - a força externa resultante atuando no corpo 1. Da mesma forma - a força externa resultante atuando no corpo 2 (Fig. 6).
Além disso, os corpos 1 e 2 podem interagir entre si. Deixe o corpo 2 agir sobre o corpo 1 com força. Então o corpo 1 age no corpo 2 com força. De acordo com a terceira lei de Newton, as forças e são iguais em valor absoluto e opostas em direção: . Força e é força interior, operando no sistema.
Vamos escrever para cada corpo 1 e 2 a segunda lei de Newton na forma ( 1 ):
, ( 4 )
. ( 5 )
Vamos adicionar as igualdades ( 4 ) e ( 5 ):
No lado esquerdo da igualdade resultante está a soma das derivadas, que é igual à derivada da soma dos vetores e . Do lado direito temos, em virtude da terceira lei de Newton:
Mas - este é o impulso do sistema de corpos 1 e 2. Também denotamos - esta é a resultante de forças externas que atuam no sistema. Nós temos:
. ( 6 )
Nesse caminho, a taxa de variação da quantidade de movimento de um sistema de corpos é a resultante de forças externas aplicadas ao sistema. A igualdade ( 6 ), que desempenha o papel da segunda lei de Newton para o sistema dos corpos, é o que queríamos obter.
A fórmula (6) foi derivada para o caso de dois corpos. Vamos agora generalizar nosso raciocínio para o caso de um número arbitrário de corpos no sistema.
O impulso do sistema de corpos corpos é chamado de soma vetorial dos impulsos de todos os corpos incluídos no sistema. Se o sistema consiste em corpos, então a quantidade de movimento desse sistema é igual a:
Então tudo é feito exatamente da mesma maneira que acima (apenas tecnicamente parece um pouco mais complicado). Se para cada corpo escrevermos igualdades semelhantes a ( 4 ) e ( 5 ), e depois somarmos todas essas igualdades, então no lado esquerdo obtemos novamente a derivada do momento do sistema e no lado direito apenas a soma de as forças externas permanecem (as forças internas, somadas aos pares, resultarão em zero devido à terceira lei de Newton). Portanto, a igualdade (6) permanecerá válida no caso geral.
Lei da conservação da quantidade de movimento
O sistema do corpo é chamado fechado se as ações de corpos externos sobre os corpos de um determinado sistema são desprezíveis ou se compensam. Assim, no caso de um sistema fechado de corpos, apenas a interação desses corpos entre si é essencial, mas não com quaisquer outros corpos.
A resultante de forças externas aplicadas a um sistema fechado é igual a zero: . Neste caso, de (6) obtemos:
Mas se a derivada do vetor desaparece (a taxa de variação do vetor é zero), então o próprio vetor não muda com o tempo:
Lei da conservação da quantidade de movimento. O momento de um sistema fechado de corpos permanece constante ao longo do tempo para quaisquer interações de corpos dentro desse sistema.
Os problemas mais simples sobre a lei da conservação do momento são resolvidos de acordo com o esquema padrão, que mostraremos agora.
Uma tarefa. Um corpo de massa r move-se com velocidade m/s sobre uma superfície horizontal lisa. Um corpo de massa r está se movendo em sua direção com uma velocidade de m/s. Ocorre um impacto absolutamente inelástico (os corpos grudam). Encontre a velocidade dos corpos após o impacto.
Solução. A situação é mostrada na Fig. 7. Vamos direcionar o eixo na direção do movimento do primeiro corpo.
 |
| Arroz. 7. Para a tarefa |
Como a superfície é lisa, não há atrito. Como a superfície é horizontal e o movimento ocorre ao longo dela, a força da gravidade e a reação do suporte se equilibram:
Assim, a soma vetorial das forças aplicadas ao sistema desses corpos é igual a zero. Isso significa que o sistema de corpos é fechado. Portanto, satisfaz a lei da conservação da quantidade de movimento:
. ( 7 )
O impulso do sistema antes do impacto é a soma dos impulsos dos corpos:
Após um impacto inelástico, obteve-se um corpo de massa, que se move com a velocidade desejada:
Da lei de conservação do momento ( 7 ) temos:
A partir daqui encontramos a velocidade do corpo formado após o impacto:
Vamos passar para as projeções no eixo:
Por condição, temos: m/s, m/s, de modo que
O sinal de menos indica que os corpos pegajosos se movem na direção oposta ao eixo. Velocidade alvo: m/s.
Lei de conservação da projeção de momento
A seguinte situação ocorre frequentemente em tarefas. O sistema de corpos não é fechado (a soma vetorial das forças externas que atuam no sistema não é igual a zero), mas existe tal eixo, a soma das projeções das forças externas no eixo é zero a qualquer momento. Então podemos dizer que ao longo desse eixo, nosso sistema de corpos se comporta como fechado, e a projeção do momento do sistema sobre o eixo é preservada.
Vamos mostrar isso mais estritamente. Igualdade do projeto ( 6 ) no eixo :
Se a projeção das forças externas resultantes desaparece, então
Portanto, a projeção é uma constante:
Lei da conservação da projeção do momento. Se a projeção no eixo da soma das forças externas que atuam sobre o sistema é igual a zero, então a projeção do momento do sistema não muda com o tempo.
Vejamos um exemplo de um problema específico, como funciona a lei de conservação da projeção do momento.
Uma tarefa. Um menino de massa, patinando no gelo liso, joga uma pedra de massa com velocidade em um ângulo em relação ao horizonte. Encontre a velocidade com que o menino rola para trás após o arremesso.
Solução. A situação é mostrada esquematicamente na Fig. oito . O menino é representado como um retângulo.
 |
| Arroz. 8. Para a tarefa |
O momento do sistema "menino + pedra" não é conservado. Isso pode ser visto pelo menos pelo fato de que, após o lançamento, aparece uma componente vertical do momento do sistema (ou seja, o componente vertical do momento da pedra), que não existia antes do lançamento.
Portanto, o sistema que o menino e a pedra formam não é fechado. Por quê? O fato é que a soma vetorial das forças externas não é igual a zero durante o arremesso. O valor é maior que a soma e, devido a esse excesso, é justamente a componente vertical do momento do sistema que aparece.
No entanto, as forças externas atuam apenas verticalmente (sem atrito). Portanto, a projeção do momento no eixo horizontal é preservada. Antes do arremesso, essa projeção era igual a zero. Direcionando o eixo na direção do arremesso (para que o menino fosse na direção do semieixo negativo), obtemos.
impulso do corpo
A quantidade de movimento de um corpo é uma quantidade igual ao produto da massa do corpo pela sua velocidade.
Cabe lembrar que estamos falando de um corpo que pode ser representado como um ponto material. O momento de um corpo ($p$) também é chamado de momento. O conceito de momento foi introduzido na física por René Descartes (1596-1650). O termo "impulso" apareceu mais tarde (impulsus em latim significa "empurrar"). A quantidade de movimento é uma grandeza vetorial (como a velocidade) e é expressa pela fórmula:
$p↖(→)=mυ↖(→)$
A direção do vetor momento sempre coincide com a direção da velocidade.
A unidade de momento no SI é o momento de um corpo com massa de $ 1$ kg movendo-se a uma velocidade de $ 1$ m/s, portanto, a unidade de momento é $ 1$ kg $·$ m/s.
Se uma força constante atua sobre um corpo (ponto material) durante o intervalo de tempo $∆t$, então a aceleração também será constante:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
onde, $(υ_1)↖(→)$ e $(υ_2)↖(→)$ são as velocidades inicial e final do corpo. Substituindo este valor na expressão da segunda lei de Newton, temos:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Abrindo os colchetes e usando a expressão para o momento do corpo, temos:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Aqui $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ é a mudança de momento ao longo do tempo $∆t$. Então a equação anterior fica:
$∆p↖(→)=F↖(→)∆t$
A expressão $∆p↖(→)=F↖(→)∆t$ é uma representação matemática da segunda lei de Newton.
O produto de uma força e sua duração é chamado impulso de força. É por isso a variação da quantidade de movimento de um ponto é igual à variação da quantidade de movimento da força que atua sobre ele.
A expressão $∆p↖(→)=F↖(→)∆t$ é chamada equação do movimento do corpo. Deve-se notar que a mesma ação - uma mudança no momento de um ponto - pode ser obtida por uma pequena força em um longo período de tempo e por uma grande força em um pequeno período de tempo.
Impulso do sistema tel. Lei da mudança de momento
O impulso (momento) de um sistema mecânico é um vetor igual à soma dos impulsos de todos os pontos materiais deste sistema:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
As leis da mudança e conservação do momento são uma consequência da segunda e terceira leis de Newton.
Considere um sistema formado por dois corpos. As forças ($F_(12)$ e $F_(21)$ na figura, com as quais os corpos do sistema interagem entre si, são chamadas internas.
Deixe, além das forças internas, as forças externas $(F_1)↖(→)$ e $(F_2)↖(→)$ atuarem no sistema. Para cada corpo, a equação $∆p↖(→)=F↖(→)∆t$ pode ser escrita. Somando as partes esquerda e direita dessas equações, obtemos:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
De acordo com a terceira lei de Newton $(F_(12))↖(→)=-(F_(21))↖(→)$.
Consequentemente,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
No lado esquerdo está a soma geométrica das variações da quantidade de movimento de todos os corpos do sistema, igual à variação da quantidade de movimento do próprio sistema - $(∆p_(syst))↖(→)$. em mente, a igualdade $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ pode ser escrita:
$(∆p_(sys))↖(→)=F↖(→)∆t$
onde $F↖(→)$ é a soma de todas as forças externas que atuam sobre o corpo. O resultado obtido significa que apenas forças externas podem alterar a quantidade de movimento do sistema, e a mudança na quantidade de movimento do sistema é direcionada da mesma forma que a força externa total. Esta é a essência da lei da mudança no momento de um sistema mecânico.
As forças internas não podem alterar o momento total do sistema. Eles apenas alteram os impulsos dos corpos individuais do sistema.
Lei da conservação da quantidade de movimento
Da equação $(∆p_(syst))↖(→)=F↖(→)∆t$ segue a lei de conservação do momento. Se nenhuma força externa atua no sistema, então o lado direito da equação $(∆p_(sys))↖(→)=F↖(→)∆t$ se anula, o que significa que o momento total do sistema permanece inalterado :
$(∆p_(sys))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Um sistema no qual nenhuma força externa atua ou a resultante de forças externas é igual a zero é chamado fechado.
A lei da conservação da quantidade de movimento afirma:
O momento total de um sistema fechado de corpos permanece constante para qualquer interação dos corpos do sistema entre si.
O resultado obtido é válido para um sistema contendo um número arbitrário de corpos. Se a soma das forças externas não for igual a zero, mas a soma de suas projeções em alguma direção for igual a zero, a projeção do momento do sistema nessa direção não mudará. Assim, por exemplo, um sistema de corpos na superfície da Terra não pode ser considerado fechado devido à força da gravidade agindo sobre todos os corpos, entretanto, a soma das projeções dos impulsos na direção horizontal pode permanecer inalterada (na ausência de atrito), já que nesta direção a força da gravidade não é válida.
Jato-Propulsão
Considere exemplos que confirmam a validade da lei da conservação do momento.
Vamos pegar um balão de borracha infantil, inflá-lo e soltá-lo. Veremos que quando o ar começar a sair dele em uma direção, o próprio balão voará na outra direção. O movimento da bola é um exemplo de propulsão a jato. É explicado pela lei da conservação do momento: o momento total do sistema "bola mais ar nele" antes da saída de ar é zero; deve permanecer igual a zero durante o movimento; portanto, a bola se move na direção oposta à direção de saída do jato, e com tal velocidade que seu momento é igual em valor absoluto ao momento do jato de ar.
jato-Propulsão chamado de movimento de um corpo que ocorre quando uma parte dele se separa dele em alguma velocidade. Devido à lei da conservação do momento, a direção do movimento do corpo é oposta à direção do movimento da parte separada.
Os vôos de foguetes são baseados no princípio da propulsão a jato. Um foguete espacial moderno é uma aeronave muito complexa. A massa do foguete é a soma da massa do fluido de trabalho (ou seja, gases quentes resultantes da combustão do combustível e ejetados na forma de uma corrente de jato) e a massa final, ou, como dizem, “seca” do foguete, permanecendo após a ejeção do fluido de trabalho do foguete.
Quando um jato de gás reativo é ejetado de um foguete em alta velocidade, o próprio foguete corre na direção oposta. De acordo com a lei de conservação do momento, o momento $m_(p)υ_p$ adquirido pelo foguete deve ser igual ao momento $m_(gás) υ_(gás)$ dos gases ejetados:
$m_(p)υ_p=m_(gás) υ_(gás)$
Segue que a velocidade do foguete
$υ_p=((m_(gás))/(m_p)) υ_(gás)$
Pode-se ver a partir desta fórmula que quanto maior a velocidade do foguete, maior a velocidade dos gases ejetados e a razão entre a massa do fluido de trabalho (ou seja, a massa de combustível) para o final ("seco") massa do foguete.
A fórmula $υ_p=((m_(gás))/(m_p))·υ_(gás)$ é aproximada. Não leva em conta que à medida que o combustível queima, a massa do foguete voador se torna cada vez menor. A fórmula exata para a velocidade de um foguete foi obtida em 1897 por K. E. Tsiolkovsky e leva seu nome.
Forçar trabalho
O termo "trabalho" foi introduzido na física em 1826 pelo cientista francês J. Poncelet. Se na vida cotidiana apenas o trabalho humano é chamado de trabalho, então na física e, em particular, na mecânica, é geralmente aceito que o trabalho é feito pela força. A quantidade física de trabalho geralmente é indicada pela letra $A$.
Forçar trabalho- esta é uma medida da ação de uma força, dependendo de seu módulo e direção, bem como do deslocamento do ponto de aplicação da força. Para uma força constante e movimento retilíneo, o trabalho é determinado pela igualdade:
$A=F|∆r↖(→)|cosα$
onde $F$ é a força que atua sobre o corpo, $∆r↖(→)$ é o deslocamento, $α$ é o ângulo entre a força e o deslocamento.

O trabalho da força é igual ao produto dos módulos de força e deslocamento e o cosseno do ângulo entre eles, ou seja, o produto escalar dos vetores $F↖(→)$ e $∆r↖(→)$.
O trabalho é uma grandeza escalar. Se $α 0$, e se $90°
Quando várias forças atuam sobre um corpo, o trabalho total (a soma do trabalho de todas as forças) é igual ao trabalho da força resultante.
A unidade SI de trabalho é joule($1$J). $1$ J é o trabalho realizado por uma força de $1$ N em uma trajetória de $1$ m na direção dessa força. Esta unidade recebeu o nome do cientista inglês J. Joule (1818-1889): $1$ J = $1$ N $·$ m. Kilojoules e milijoules também são usados com frequência: $1$ kJ $= 1.000$ J, $1$ mJ $ = 0,001$ J.
O trabalho da gravidade
Consideremos um corpo deslizando ao longo de um plano inclinado com ângulo de inclinação $α$ e altura $H$.

Expressamos $∆x$ em termos de $H$ e $α$:
$∆x=(H)/(senα)$
Considerando que a gravidade $F_т=mg$ faz um ângulo ($90° - α$) com a direção do movimento, usando a fórmula $∆x=(H)/(sin)α$, obtemos uma expressão para o trabalho da gravidade $A_g$:
$A_g=mg cos(90°-α)(H)/(sinα)=mgH$
A partir desta fórmula pode-se ver que o trabalho da gravidade depende da altura e não depende do ângulo de inclinação do plano.
Disso decorre que:
- o trabalho da gravidade não depende da forma da trajetória ao longo da qual o corpo se move, mas apenas da posição inicial e final do corpo;
- quando um corpo se move ao longo de uma trajetória fechada, o trabalho da gravidade é zero, ou seja, a gravidade é uma força conservativa (forças conservativas são forças que possuem essa propriedade).
O trabalho das forças de reação, é zero porque a força de reação ($N$) é direcionada perpendicularmente ao deslocamento $∆x$.
O trabalho da força de atrito
A força de atrito é direcionada oposta ao deslocamento $∆x$ e faz um ângulo $180°$ com ele, então o trabalho da força de atrito é negativo:
$A_(tr)=F_(tr)∆x cos180°=-F_(tr) ∆x$
Como $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ então
$A_(tr)=μmgHctgα$
O trabalho da força elástica
Faça uma força externa $F↖(→)$ agir sobre uma mola não esticada de comprimento $l_0$, esticando-a em $∆l_0=x_0$. Na posição $x=x_0F_(controle)=kx_0$. Após o término da força $F↖(→)$ no ponto $x_0$, a mola é comprimida sob a ação da força $F_(controle)$.

Vamos determinar o trabalho da força elástica quando a coordenada da extremidade direita da mola muda de $х_0$ para $х$. Como a força elástica nessa área varia linearmente, pela lei de Hooke, seu valor médio nessa área pode ser usado:
$F_(ex.av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Então o trabalho (levando em conta o fato de que as direções $(F_(exp.av.))↖(→)$ e $(∆x)↖(→)$ coincidem) é igual a:
$A_(exerc)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Pode-se mostrar que a forma da última fórmula não depende do ângulo entre $(F_(exp.av.))↖(→)$ e $(∆x)↖(→)$. O trabalho das forças elásticas depende apenas das deformações da mola nos estados inicial e final.
Assim, a força elástica, como a gravidade, é uma força conservativa.
Poder da força
A potência é uma quantidade física medida pela razão entre o trabalho e o período de tempo durante o qual é produzido.
Em outras palavras, a potência mostra quanto trabalho é feito por unidade de tempo (no SI, para $ 1$ s).
A potência é determinada pela fórmula:
onde $N$ é a potência, $A$ é o trabalho realizado no tempo $∆t$.
Substituindo $A=F|(∆r)↖(→)|cosα$ na fórmula $N=(A)/(∆t)$ em vez do trabalho $A$, temos:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
A potência é igual ao produto dos módulos dos vetores força e velocidade e o cosseno do ângulo entre esses vetores.
A potência no sistema SI é medida em watts (W). Um watt ($1$ W) é a potência na qual $1$ J de trabalho é realizado em $1$ s: $1$ W $= 1$ J/s.
Esta unidade recebeu o nome do inventor inglês J. Watt (Watt), que construiu a primeira máquina a vapor. O próprio J. Watt (1736-1819) usou uma unidade diferente de potência - cavalos (hp), que ele introduziu para poder comparar o desempenho de uma máquina a vapor e um cavalo: $ 1 $ hp. $= 735,5$ Ter.
Na tecnologia, unidades maiores de energia são frequentemente usadas - quilowatts e megawatts: $ 1 $ kW $ = 1000 $ W, $ 1 $ MW $ = 1000000 $ W.
Energia cinética. Lei da variação da energia cinética
Se um corpo ou vários corpos em interação (um sistema de corpos) podem realizar trabalho, então eles dizem que têm energia.
A palavra "energia" (do grego. energia - ação, atividade) é muito utilizada na vida cotidiana. Assim, por exemplo, as pessoas que podem trabalhar rapidamente são chamadas de energéticas, com grande energia.
A energia possuída por um corpo devido ao movimento é chamada de energia cinética.
Como no caso da definição de energia em geral, podemos dizer sobre energia cinética que energia cinética é a capacidade de um corpo em movimento realizar trabalho.
Vamos encontrar a energia cinética de um corpo de massa $m$ movendo-se com uma velocidade de $υ$. Como a energia cinética é a energia devida ao movimento, o estado zero para ela é o estado em que o corpo está em repouso. Tendo encontrado o trabalho necessário para comunicar uma determinada velocidade ao corpo, encontraremos sua energia cinética.
Para isso, calculamos o trabalho realizado na seção de deslocamento $∆r↖(→)$ quando as direções dos vetores de força $F↖(→)$ e o deslocamento $∆r↖(→)$ coincidem. Neste caso, o trabalho é
onde $∆x=∆r$

Para o movimento de um ponto com aceleração $α=const$, a expressão do movimento tem a forma:
$∆x=υ_1t+(at^2)/(2),$
onde $υ_1$ é a velocidade inicial.
Substituindo a expressão para $∆x$ de $∆x=υ_1t+(at^2)/(2)$ na equação $A=F ∆x$ e usando a segunda lei de Newton $F=ma$, temos:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Expressando a aceleração em termos das velocidades inicial $υ_1$ e final $υ_2$ $a=(υ_2-υ_1)/(t)$ e substituindo em $A=ma(υ_1t+(at^2)/(2))=( mat)/ (2)(2υ_1+at)$ temos:
$A=(m(υ_2-υ_1))/(2) (2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Agora igualando a velocidade inicial a zero: $υ_1=0$, obtemos uma expressão para energia cinética:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Assim, um corpo em movimento tem energia cinética. Essa energia é igual ao trabalho que deve ser feito para aumentar a velocidade do corpo de zero para $υ$.
De $E_K=(mυ)/(2)=(p^2)/(2m)$ segue que o trabalho de uma força para mover um corpo de uma posição para outra é igual à variação da energia cinética:
$A=E_(K_2)-E_(K_1)=∆E_K$
A igualdade $A=E_(K_2)-E_(K_1)=∆E_K$ expressa teorema da variação da energia cinética.
Variação da energia cinética do corpo(ponto material) por um certo período de tempo é igual ao trabalho realizado durante esse tempo pela força que atua sobre o corpo.
Energia potencial
A energia potencial é a energia determinada pelo arranjo mútuo de corpos em interação ou partes do mesmo corpo.
Como a energia é definida como a capacidade de um corpo realizar trabalho, a energia potencial é naturalmente definida como o trabalho de uma força que depende apenas da posição relativa dos corpos. Este é o trabalho da gravidade $A=mgh_1-mgh_2=mgH$ e o trabalho da elasticidade:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
A energia potencial do corpo interagindo com a Terra chama-se o valor igual ao produto da massa $m$ deste corpo pela aceleração de queda livre $g$ e a altura $h$ do corpo acima da superfície da Terra:
A energia potencial de um corpo deformado elasticamente é o valor igual a metade do produto do coeficiente de elasticidade (rigidez) $k$ do corpo e o quadrado da deformação $∆l$:
$E_p=(1)/(2)k∆l^2$
O trabalho das forças conservativas (gravidade e elasticidade), levando em conta $E_p=mgh$ e $E_p=(1)/(2)k∆l^2$, é expresso da seguinte forma:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Esta fórmula nos permite dar uma definição geral de energia potencial.
A energia potencial de um sistema é um valor que depende da posição dos corpos, cuja mudança durante a transição do sistema do estado inicial para o estado final é igual ao trabalho das forças conservativas internas do sistema, tomada com o sinal oposto.
O sinal de menos no lado direito da equação $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ significa que quando o trabalho é feito por forças internas ( por exemplo, queda do corpo ao solo sob a ação da gravidade no sistema "pedra-Terra"), a energia do sistema diminui. Trabalho e variação de energia potencial em um sistema sempre têm sinais opostos.
Como o trabalho determina apenas a variação da energia potencial, somente a variação da energia tem significado físico na mecânica. Portanto, a escolha do nível de energia zero é arbitrária e é determinada apenas por considerações de conveniência, por exemplo, a facilidade de escrever as equações correspondentes.
A lei da mudança e conservação da energia mecânica
Energia mecânica total do sistema a soma de suas energias cinética e potencial é chamada:
É determinado pela posição dos corpos (energia potencial) e sua velocidade (energia cinética).
De acordo com o teorema da energia cinética,
$E_k-E_(k_1)=A_p+A_(pr),$
onde $А_р$ é o trabalho de forças potenciais, $А_(pr)$ é o trabalho de forças não potenciais.
Por sua vez, o trabalho das forças potenciais é igual à diferença da energia potencial do corpo nos estados inicial $E_(p_1)$ e final $E_p$. Com isso em mente, obtemos uma expressão para a lei da variação da energia mecânica:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
onde o lado esquerdo da igualdade é a variação da energia mecânica total e o lado direito é o trabalho das forças não potenciais.
Então, lei da variação da energia mecânica lê:
A variação da energia mecânica do sistema é igual ao trabalho de todas as forças não potenciais.
Um sistema mecânico no qual apenas forças potenciais atuam é chamado conservativo.
Em um sistema conservativo $A_(pr) = 0$. isso implica lei da conservação da energia mecânica:
Em um sistema conservativo fechado, a energia mecânica total é conservada (não varia com o tempo):
$E_k+E_p=E_(k_1)+E_(p_1)$
A lei de conservação da energia mecânica é derivada das leis da mecânica newtoniana, que são aplicáveis a um sistema de pontos materiais (ou macropartículas).
No entanto, a lei da conservação da energia mecânica também é válida para um sistema de micropartículas, onde as próprias leis de Newton não se aplicam mais.
A lei da conservação da energia mecânica é uma consequência da homogeneidade do tempo.
Uniformidade de tempoé que, nas mesmas condições iniciais, o curso dos processos físicos não depende do momento em que essas condições são criadas.
A lei da conservação da energia mecânica total significa que quando a energia cinética em um sistema conservativo muda, sua energia potencial também deve mudar, de modo que sua soma permaneça constante. Isso significa a possibilidade de converter um tipo de energia em outro.
De acordo com várias formas de movimento da matéria, vários tipos de energia são considerados: mecânica, interna (igual à soma da energia cinética do movimento caótico das moléculas em relação ao centro de massa do corpo e a energia potencial de a interação das moléculas entre si), eletromagnética, química (que consiste na energia cinética do movimento dos elétrons e elétrica a energia de sua interação entre si e com os núcleos atômicos), energia nuclear, etc. o anterior que a divisão de energia em diferentes tipos é bastante arbitrária.
Os fenômenos naturais geralmente são acompanhados pela transformação de um tipo de energia em outro. Assim, por exemplo, o atrito de peças de vários mecanismos leva à conversão de energia mecânica em calor, ou seja, em energia interna. Nas máquinas térmicas, ao contrário, a energia interna é convertida em energia mecânica; nas células galvânicas, a energia química é convertida em energia elétrica, etc.
Atualmente, o conceito de energia é um dos conceitos básicos da física. Este conceito está inextricavelmente ligado à ideia da transformação de uma forma de movimento em outra.
Aqui está como o conceito de energia é formulado na física moderna:
A energia é uma medida quantitativa geral do movimento e interação de todos os tipos de matéria. A energia não surge do nada e não desaparece, só pode passar de uma forma para outra. O conceito de energia une todos os fenômenos da natureza.
mecanismos simples. eficiência do mecanismo
Mecanismos simples são dispositivos que alteram a magnitude ou direção das forças aplicadas ao corpo.
Eles são usados para mover ou levantar grandes cargas com pouco esforço. Estes incluem a alavanca e suas variedades - blocos (móveis e fixos), um portão, um plano inclinado e suas variedades - uma cunha, um parafuso etc.
Braço de alavanca. Regra de alavanca
A alavanca é um corpo rígido capaz de girar em torno de um suporte fixo.

A regra de alavancagem diz:
Uma alavanca está em equilíbrio se as forças aplicadas a ela são inversamente proporcionais aos seus braços:
$(F_2)/(F_1)=(l_1)/(l_2)$
Da fórmula $(F_2)/(F_1)=(l_1)/(l_2)$, aplicando a propriedade de proporção a ela (o produto dos termos extremos da proporção é igual ao produto de seus termos médios), temos pode obter a seguinte fórmula:
Mas $F_1l_1=M_1$ é o momento da força que tende a girar a alavanca no sentido horário, e $F_2l_2=M_2$ é o momento da força que tende a girar a alavanca no sentido anti-horário. Assim, $M_1=M_2$, que deveria ser provado.
A alavanca começou a ser usada por pessoas nos tempos antigos. Com sua ajuda, foi possível levantar pesadas lajes de pedra durante a construção das pirâmides no antigo Egito. Sem alavancagem, isso não teria sido possível. De fato, por exemplo, para a construção da pirâmide de Quéops, que tem uma altura de $ 147$ m, foram usados mais de dois milhões de blocos de pedra, sendo que o menor deles tinha uma massa de $ 2,5$ toneladas!
Hoje em dia, as alavancas são amplamente utilizadas tanto na produção (por exemplo, guindastes) quanto na vida cotidiana (tesouras, alicates, balanças).
Bloco fixo
A ação de um bloco fixo é semelhante à ação de uma alavanca com igual alavancagem: $l_1=l_2=r$. A força aplicada $F_1$ é igual à carga $F_2$, e a condição de equilíbrio é:
Bloco fixo usado quando você precisa alterar a direção de uma força sem alterar sua magnitude.
Bloco móvel
O bloco móvel atua de forma semelhante a uma alavanca, cujos braços são: $l_2=(l_1)/(2)=r$. Neste caso, a condição de equilíbrio tem a forma:
onde $F_1$ é a força aplicada, $F_2$ é a carga. O uso de um bloco móvel dá um ganho de força duas vezes.
Polyspast (sistema de bloco)
Uma talha de corrente comum consiste em blocos $n$ móveis e $n$ fixos. Aplicá-lo dá um ganho de força de $ 2n$ vezes:
$F_1=(F_2)/(2n)$
Talha de corrente elétrica consiste em n bloco móvel e um fixo. O uso de uma talha de corrente elétrica proporciona um ganho de força de $2^n$ vezes:
$F_1=(F_2)/(2^n)$

Parafuso
O parafuso é um plano inclinado enrolado no eixo.

A condição para o equilíbrio de forças atuando no parafuso tem a forma:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

onde $F_1$ é uma força externa aplicada ao parafuso e atuando a uma distância $R$ do seu eixo; $F_2$ é a força que atua na direção do eixo do parafuso; $h$ - passo do parafuso; $r$ é o raio médio da rosca; $α$ é o ângulo da rosca. $R$ é o comprimento da alavanca (chave) que gira o parafuso com a força $F_1$.
Eficiência
Coeficiente de desempenho (COP) - a proporção de trabalho útil para todo o trabalho despendido.
A eficiência é frequentemente expressa como uma porcentagem e denotada pela letra grega $η$ ("isto"):
$η=(A_p)/(A_3) 100%$
onde $A_n$ é o trabalho útil, $A_3$ é todo o trabalho gasto.
O trabalho útil é sempre apenas uma parte do trabalho total que uma pessoa gasta usando este ou aquele mecanismo.
Parte do trabalho realizado é gasto na superação das forças de atrito. Desde $А_3 > А_п$, a eficiência é sempre menor que $1$ (ou $< 100%$).
Como cada um dos trabalhos nesta equação pode ser expresso como o produto da força correspondente pela distância percorrida, ela pode ser reescrita da seguinte forma: $F_1s_1≈F_2s_2$.
Disto segue-se que, ganhando com a ajuda do mecanismo em vigor, perdemos o mesmo número de vezes no caminho e vice-versa. Essa lei é chamada de regra de ouro da mecânica.
A regra de ouro da mecânica é uma lei aproximada, pois não leva em consideração o trabalho para vencer o atrito e a gravidade das partes dos dispositivos utilizados. No entanto, pode ser muito útil ao analisar o funcionamento de qualquer mecanismo simples.

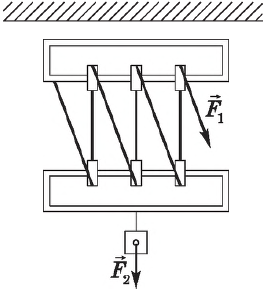
Assim, por exemplo, graças a esta regra, podemos dizer imediatamente que o trabalhador mostrado na figura, com um ganho duplo na força de elevação de $ 10 $ cm, terá que abaixar a extremidade oposta da alavanca em $ 20 $ cm.
Colisão de corpos. Impactos elásticos e inelásticos
As leis de conservação do momento e da energia mecânica são usadas para resolver o problema do movimento dos corpos após uma colisão: os momentos e energias conhecidos antes da colisão são usados para determinar os valores dessas quantidades após a colisão. Considere os casos de impactos elásticos e inelásticos.
Um impacto absolutamente inelástico é chamado, após o qual os corpos formam um único corpo movendo-se a uma certa velocidade. O problema da velocidade deste último é resolvido usando a lei da conservação da quantidade de movimento para um sistema de corpos com massas $m_1$ e $m_2$ (se estamos falando de dois corpos) antes e depois do impacto:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Obviamente, a energia cinética dos corpos não é conservada durante um impacto inelástico (por exemplo, em $(υ_1)↖(→)=-(υ_2)↖(→)$ e $m_1=m_2$ torna-se igual a zero após o impacto).
Um impacto absolutamente elástico é chamado, no qual não apenas a soma dos impulsos é preservada, mas também a soma das energias cinéticas dos corpos em colisão.
Para um impacto absolutamente elástico, as equações
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2 )^2)/(2)$
onde $m_1, m_2$ são as massas das bolas, $υ_1, υ_2$ são as velocidades das bolas antes do impacto, $υ"_1, υ"_2$ são as velocidades das bolas após o impacto.
Impulso de força e momento do corpo
Como mostrado, a segunda lei de Newton pode ser escrita como
Ft=mv-mv o=p-p o=D p.
A quantidade vetorial Ft, igual ao produto da força pelo tempo de sua ação, é chamada impulso de força. A quantidade vetorial p=mv, que é igual ao produto da massa do corpo e sua velocidade, é chamada impulso do corpo.
No SI, a unidade de quantidade de movimento é a quantidade de movimento de um corpo com massa de 1 kg movendo-se a uma velocidade de 1 m/s, ou seja. a unidade de momento é quilograma por segundo (1 kg m/s).
A variação da quantidade de movimento do corpo D p ao longo do tempo t é igual à quantidade de movimento da força Ft que atua sobre o corpo durante esse tempo.
O conceito de momento é um dos conceitos fundamentais da física. A quantidade de movimento de um corpo é uma das grandezas capazes, sob certas condições, de manter seu valor inalterado.(mas módulo, e na direção).
Conservação da quantidade de movimento total de um sistema fechado
Sistema fechado chamar um grupo de corpos que não interagem com nenhum outro corpo que não faça parte deste grupo. As forças de interação entre corpos em um sistema fechado são chamadas de interno. (As forças internas são geralmente indicadas pela letra f).
Considere a interação de corpos dentro de um sistema fechado. Deixe duas bolas de mesmo diâmetro, feitas de substâncias diferentes (isto é, com massas diferentes), rolarem sobre uma superfície horizontal perfeitamente lisa e colidirem uma com a outra. Durante o impacto, que consideraremos central e absolutamente elástico, as velocidades e os momentos das bolas mudam. Seja a massa da primeira bola m 1 , sua velocidade antes do impacto V 1 , e após o impacto V 1 "; a massa da segunda bola m 2 , sua velocidade antes do impacto v 2 , após o impacto v 2 ". De acordo com a terceira lei de Newton, as forças de interação entre as bolas são iguais em valor absoluto e opostas em direção, ou seja, f 1 \u003d -f 2.
De acordo com a segunda lei de Newton, a mudança nos momentos das bolas como resultado de sua colisão é igual ao momento das forças de interação entre elas, ou seja,
m 1 v 1 "-m 1 v 1 \u003d f 1 t (3.1)
m 2 v 2 "-m 2 v 2 \u003d f 2 t (3,2)
onde t é o tempo de interação das bolas.
Adicionando as expressões (3.1) e (3.2) termo a termo, encontramos que
m 1 v 1 "-m 1 v 1 + m 2 v 2 "-m 2 v 2 \u003d 0.
Consequentemente,
m 1 v 1 "+m 2 v 2" \u003d m 1 v 1 + m 2 v 2
ou então
p 1 "+p 2" \u003d p 1 +p 2. (3.3)
Vamos denotar p 1 "+p 2 "=p" e p 1 +p 2 =p.
A soma vetorial dos impulsos de todos os corpos incluídos no sistema é chamada impulso total deste sistema. De (3.3) pode-se ver que p "= p, ou seja, p" - p \u003d D p \u003d 0, portanto,
p=p 1 +p 2 = const.
Fórmula (3.4) expressa lei da conservação da quantidade de movimento em um sistema fechado, que é formulado da seguinte forma: o momento total de um sistema fechado de corpos permanece constante para quaisquer interações dos corpos desse sistema entre si.
Em outras palavras, as forças internas não podem alterar o momento total do sistema nem em valor absoluto nem em direção.
Mudança no momento total de um sistema aberto
Um grupo de corpos que interagem não apenas entre si, mas também com corpos que não fazem parte desse grupo, é chamado de sistema aberto. As forças com as quais os corpos que não estão incluídos neste sistema agem sobre os corpos de um determinado sistema são chamadas de forças externas (geralmente as forças externas são indicadas pela letra F).
Considere a interação de dois corpos em um sistema aberto. A mudança nos impulsos desses corpos ocorre tanto sob a ação de forças internas quanto sob a ação de forças externas.
De acordo com a segunda lei de Newton, as mudanças nos momentos dos corpos considerados para o primeiro e segundo corpos são
D p 1 \u003d f 1 t + F 1 t (3,5)
D p 2 \u003d f 2 t + F 2 t (3,6)
onde t é o tempo de ação das forças externas e internas.
Adicionando as expressões (3.5) e (3.6) termo a termo, encontramos que
D (p 1 +p 2)=(f 1 +f 2)t +(F 1 +F 2)t (3,7)
Nesta fórmula, p \u003d p 1 + p 2 - o momento total do sistema, f 1 + f 2 \u003d 0 (já que, de acordo com a terceira lei de Newton (f 1 \u003d -f 2), F 1 + F 2 \u003d F é a resultante de todas as forças externas , agindo sobre os corpos do sistema dado Em vista do que foi dito, a fórmula (3.7) assume a forma
Dp=Ft. (3.8)
De (3.8) vemos que a quantidade de movimento total do sistema muda apenas sob a ação de forças externas. Se o sistema for fechado, ou seja, F=0, então D p=0 e, consequentemente, p=const. Assim, a fórmula (3.4) é um caso especial da fórmula (3.8), que mostra em que condições o momento total do sistema é preservado e em que condições ele muda.
Jato-Propulsão.
O significado do trabalho de Tsiolkovsky para a astronáutica
O movimento de um corpo que ocorre como resultado da separação de parte de sua massa dele a uma certa velocidade é chamado reativo.
Todos os tipos de movimento, exceto o reativo, são impossíveis sem a presença de forças externas a um determinado sistema, ou seja, sem a interação dos corpos desse sistema com o ambiente, e para a implementação da propulsão a jato, não é necessária a interação do corpo com o ambiente. Inicialmente, o sistema está em repouso, ou seja, seu momento total é zero. Quando uma parte de sua massa começa a ser ejetada do sistema a uma certa velocidade, então (uma vez que o momento total de um sistema fechado, de acordo com a lei de conservação do momento, deve permanecer inalterado), o sistema recebe uma velocidade direcionada em A direção oposta. De fato, como m 1 v 1 + m 2 v 2 \u003d 0, então m 1 v 1 \u003d -m 2 v 2, ou seja,
v 2 \u003d -v 1 m 1 / m 2.
Segue-se desta fórmula que a velocidade v 2 obtida por um sistema de massa m 2 depende da massa ejetada m 1 e da velocidade v 1 de sua ejeção.
Um motor térmico no qual a força de empuxo resultante da reação de um jato de gases quentes emitidos é aplicada diretamente ao seu corpo é chamado de motor a jato. Ao contrário de outros veículos, um dispositivo movido a jato pode se mover pelo espaço sideral.
O fundador da teoria dos voos espaciais é o notável cientista russo Tsiolkovsky (1857 - 1935). Ele deu os fundamentos gerais da teoria da propulsão a jato, desenvolveu os princípios básicos e esquemas de aeronaves a jato e provou a necessidade de usar um foguete multi-estágio para voos interplanetários. As ideias de Tsiolkovsky foram implementadas com sucesso na URSS na construção de satélites artificiais da Terra e naves espaciais.
O fundador da astronáutica prática é o cientista soviético Acadêmico Korolev (1906 - 1966). Sob sua liderança, o primeiro satélite artificial da Terra do mundo foi criado e lançado, ocorreu o primeiro voo espacial tripulado da história da humanidade. O primeiro cosmonauta da Terra foi o homem soviético Yu.A. Gagarin (1934-1968).
Perguntas para autocontrole:
- Como a segunda lei de Newton é escrita na forma impulsiva?
- O que é chamado de impulso da força? impulso do corpo?
- Que sistema de corpos é chamado de fechado?
- O que são chamadas de forças internas?
- Usando o exemplo da interação de dois corpos em um sistema fechado, mostre como se estabelece a lei da conservação do momento. Como é formulado?
- Qual é a quantidade de movimento total de um sistema?
- As forças internas podem alterar o momento total do sistema?
- Que sistema de corpos é chamado aberto?
- Que forças são chamadas externas?
- Estabeleça uma fórmula mostrando em que condições o momento total do sistema muda e em que condições ele é preservado.
- O que é um movimento reativo?
- Pode ocorrer sem a interação do corpo em movimento com o ambiente?
- Qual é a lei da propulsão a jato?
- Qual é o significado do trabalho de Tsiolkovsky para a astronáutica?
Se em um corpo de massa m por um certo período de tempo Δ t a força F → atua, então a mudança na velocidade do corpo ∆ v → = v 2 → - v 1 → segue. Obtemos que durante o tempo Δ t o corpo continua a se mover com aceleração:
a → = ∆ v → ∆ t = v 2 → - v 1 → ∆ t .
Com base na lei básica da dinâmica, ou seja, a segunda lei de Newton, temos:
F → = m a → = m v 2 → - v 1 → ∆ t ou F → ∆ t = m v 2 → -m v 1 → = m ∆ v → = ∆ m v → .
Definição 1impulso do corpo, ou quantidade de movimentoé uma quantidade física igual ao produto da massa do corpo pela velocidade de seu movimento.
A quantidade de movimento de um corpo é considerada uma grandeza vetorial, que é medida em quilograma-metro por segundo (k g m/s).
Definição 2
Impulso de forçaé uma quantidade física igual ao produto da força pelo tempo de sua ação.
O momento é referido como quantidades vetoriais. Há outra formulação da definição.
Definição 3
A variação da quantidade de movimento do corpo é igual à quantidade de movimento da força.
Com o momento denotado p → a segunda lei de Newton é escrita como:
F → ∆t = ∆p → .
Esta forma nos permite formular a segunda lei de Newton. A força F → é a resultante de todas as forças que atuam sobre o corpo. A igualdade é escrita como projeções nos eixos coordenados da vista:
F x Δt = Δpx; F y ∆t = ∆p y ; Fz ∆t = ∆pz .
Imagem 1 . 16 . 1 . Modelo de impulso corporal.
A mudança na projeção do momento do corpo em qualquer um dos três eixos mutuamente perpendiculares é igual à projeção do impulso da força no mesmo eixo.
Definição 4
Movimento unidimensionalé o movimento de um corpo ao longo de um dos eixos coordenados.
Exemplo 1
Como exemplo, considere a queda livre de um corpo com velocidade inicial v 0 sob a ação da gravidade durante um período de tempo t. Quando a direção do eixo O Y é verticalmente para baixo, o momento da gravidade F t \u003d mg, atuando no tempo t, é igual m g t. Tal impulso é igual a uma mudança no momento do corpo:
F t t \u003d m g t \u003d Δ p \u003d m (v - v 0), de onde v \u003d v 0 + g t.
A entrada coincide com a fórmula cinemática para determinar a velocidade do movimento uniformemente acelerado. O módulo de força não muda de todo o intervalo t. Quando é variável em magnitude, então a fórmula do momento requer a substituição do valor médio da força F por p do intervalo de tempo t. Imagem 1 . 16 . 2 mostra como é determinado o momento de uma força que depende do tempo.

Imagem 1 . 16 . 2. Cálculo do impulso de força a partir do gráfico de F (t)
É necessário escolher o intervalo Δ t no eixo do tempo, é claro que a força F(t) praticamente inalterado. Impulso de força F (t) Δ t por um período de tempo Δ t será igual à área da figura sombreada. Ao dividir o eixo do tempo em intervalos por Δ t i no intervalo de 0 a t, adicione os impulsos de todas as forças atuantes desses intervalos Δ ti i , então o impulso total da força será igual à área de formação usando os eixos escalonado e de tempo.
Aplicando o limite (Δ t i → 0), você pode encontrar a área que será limitada pelo gráfico F(t) e o eixo t. O uso da definição do impulso de força do cronograma é aplicável a quaisquer leis onde haja mudanças de forças e tempo. Esta solução leva à integração da função F(t) do intervalo [ 0 ; t] .
Imagem 1 . 16 . 2 mostra o impulso da força, que está no intervalo de t 1 = 0 s a t 2 = 10 .
Da fórmula, obtemos que F c p (t 2 - t 1) \u003d 1 2 F m a x (t 2 - t 1) \u003d 100 N s \u003d 100 kg m / s.
Ou seja, o exemplo mostra F com p \u003d 1 2 F m a x \u003d 10 N.
Há casos em que a determinação da força média F com p é possível com tempo conhecido e dados sobre o momento relatado. Com um forte impacto em uma bola com massa de 0,415 kg, pode ser relatada uma velocidade igual a v \u003d 30 m / s. O tempo de impacto aproximado é de 8 10 – 3 s.
Então a fórmula do momento toma a forma:
p = m v = 12,5 kg g m/s.
Para determinar a força média F c p durante o impacto, é necessário F c p = p ∆ t = 1,56 10 3 N.
Conseguimos um valor muito grande, que é igual a um corpo com massa de 160 kg.
Quando o movimento ocorre ao longo de uma trajetória curva, então o valor inicial p 1 → e o valor final
p 2 → pode ser diferente em módulo e em direção. Para determinar a quantidade de movimento ∆ p → use o diagrama de quantidade de movimento, onde existem os vetores p 1 → e p 2 → , e ∆ p → = p 2 → - p 1 → construídos de acordo com a regra do paralelogramo.
Exemplo 2
A Figura 1 é mostrada como um exemplo. 16 . 2, onde é desenhado um diagrama dos impulsos de uma bola quicando em uma parede. Ao sacar, uma bola de massa m com velocidade v 1 → atinge a superfície em um ângulo α com a normal e ricocheteia com velocidade v 2 → com ângulo β . Ao bater na parede, a bola foi submetida à força F → dirigida da mesma forma que o vetor ∆ p → .

Imagem 1 . 16 . 3 . Bola rebote de uma parede áspera e diagrama de momento.
Se houver uma queda normal de uma bola de massa m sobre uma superfície elástica com velocidade v 1 → = v → , então no rebote ela mudará para v 2 → = - v → . Isso significa que, por um certo período de tempo, a quantidade de movimento mudará e será igual a ∆ p → = - 2 m v → . Usando projeções em ОХ, o resultado será escrito como Δ p x = – 2 m v x . Do desenho 1 . 16 . 3 pode-se ver que o eixo ОХ está direcionado para longe da parede, então v x< 0 и Δ p x >0. Da fórmula obtemos que o módulo Δ p está associado ao módulo de velocidade, que assume a forma Δ p = 2 m v .
Se você notar um erro no texto, destaque-o e pressione Ctrl+Enter
Pulso (Quantidade de movimento) é uma grandeza física vetorial, que é uma medida do movimento mecânico do corpo. Na mecânica clássica, a quantidade de movimento de um corpo é igual ao produto da massa m este corpo em sua velocidade v, a direção do momento coincide com a direção do vetor velocidade:
Momento do sistema partículas é a soma vetorial dos momentos de suas partículas individuais: p=(somas) pi, Onde pié o momento da i-ésima partícula.
Teorema da variação da quantidade de movimento do sistema: a quantidade de movimento total do sistema só pode ser alterada pela ação de forças externas: Fext=dp/dt(1), i.e. a derivada temporal do momento do sistema é igual à soma vetorial de todas as forças externas que atuam sobre as partículas do sistema. Como no caso de uma única partícula, segue da expressão (1) que o incremento do momento do sistema é igual ao momento da resultante de todas as forças externas para o período de tempo correspondente:
p2-p1= t & 0 F ext dt.
Na mecânica clássica, complete impulso O sistema de pontos materiais é chamado de grandeza vetorial igual à soma dos produtos das massas dos pontos materiais em sua velocidade:
![]()
consequentemente, a quantidade é chamada de momento de um ponto material. É uma grandeza vetorial direcionada na mesma direção da velocidade da partícula. A unidade de momento no Sistema Internacional de Unidades (SI) é quilograma metro por segundo(kgm/s).
Se estamos lidando com um corpo de tamanho finito, que não consiste em pontos materiais discretos, para determinar seu momento, é necessário quebrar o corpo em pequenas partes, que podem ser consideradas como pontos materiais e somar sobre eles, como uma resultado obtemos:
O momento de um sistema que não é afetado por nenhuma força externa (ou são compensados), preservado em tempo:
A conservação do momento neste caso decorre da segunda e terceira leis de Newton: tendo escrito a segunda lei de Newton para cada um dos pontos materiais que compõem o sistema e somando-a sobre todos os pontos materiais que compõem o sistema, em virtude da terceira lei de Newton lei obtemos igualdade (*).
Na mecânica relativista, o momento tridimensional de um sistema de pontos materiais que não interagem é a quantidade
 ,
,
Onde eu- peso eu-ésimo ponto material.
Para um sistema fechado de pontos materiais não interativos, esse valor é preservado. No entanto, o momento tridimensional não é uma quantidade relativisticamente invariante, pois depende do referencial. Um valor mais significativo será um momento quadridimensional, que para um ponto material é definido como

Na prática, as seguintes relações entre a massa, momento e energia de uma partícula são frequentemente usadas:
Em princípio, para um sistema de pontos materiais não interativos, seus 4 momentos são somados. No entanto, para partículas que interagem na mecânica relativística, deve-se levar em consideração os momentos não apenas das partículas que compõem o sistema, mas também o momento do campo de interação entre elas. Portanto, uma quantidade muito mais significativa na mecânica relativística é o tensor energia-momento, que satisfaz plenamente as leis de conservação.
Propriedades de pulso
· Aditividade. Esta propriedade significa que o impulso de um sistema mecânico constituído por pontos materiais é igual à soma dos impulsos de todos os pontos materiais incluídos no sistema.
· Invariância em relação à rotação do referencial.
· Preservação. O momento não muda durante interações que alteram apenas as características mecânicas do sistema. Esta propriedade é invariante em relação às transformações de Galileu.As propriedades de conservação da energia cinética, conservação do momento e a segunda lei de Newton são suficientes para derivar a fórmula matemática do momento.
Lei da conservação da quantidade de movimento (Lei da conservação da quantidade de movimento)- a soma vetorial dos impulsos de todos os corpos do sistema é um valor constante, se a soma vetorial das forças externas que atuam no sistema for igual a zero.
Na mecânica clássica, a lei da conservação do momento é geralmente derivada como consequência das leis de Newton. A partir das leis de Newton, pode-se mostrar que, ao se mover no espaço vazio, o momento é conservado no tempo e, na presença de interação, a taxa de sua mudança é determinada pela soma das forças aplicadas.
Como qualquer uma das leis fundamentais de conservação, a lei de conservação do momento está associada, de acordo com o teorema de Noether, com uma das simetrias fundamentais - a homogeneidade do espaço
A variação da quantidade de movimento de um corpo é igual à quantidade de movimento resultante de todas as forças que atuam sobre o corpo. Esta é outra formulação da segunda lei de Newton.


