Subiecte ale codificatorului USE: impulsul unui corp, impulsul unui sistem de corpuri, legea conservării impulsului.
Puls corpul este o mărime vectorială egală cu produsul dintre masa corpului și viteza acestuia:
Nu există unități speciale pentru măsurarea impulsului. Dimensiunea impulsului este pur și simplu produsul dintre dimensiunea masei și dimensiunea vitezei:
De ce este interesant conceptul de impuls? Se dovedește că poate fi folosit pentru a da celei de-a doua legi a lui Newton o formă ușor diferită, de asemenea extrem de utilă.
A doua lege a lui Newton în formă impulsivă
Fie rezultanta forțelor aplicate corpului de masă. Începem cu notația obișnuită a celei de-a doua legi a lui Newton:
Având în vedere că accelerația corpului este egală cu derivata vectorului viteză, a doua lege a lui Newton este rescrisă după cum urmează:
Introducem o constantă sub semnul derivatei:
După cum puteți vedea, derivata impulsului este obținută în partea stângă:
. ( 1 )
Relația ( 1 ) este o nouă formă a celei de-a doua legi a lui Newton.
A doua lege a lui Newton în formă impulsivă. Derivata impulsului unui corp este rezultanta forțelor aplicate corpului.
Putem spune și asta: forța rezultată care acționează asupra corpului este egală cu rata de modificare a impulsului corpului.
Derivata din formula ( 1 ) poate fi înlocuită cu raportul incrementelor finale:
. ( 2 )
În acest caz, există o forță medie care acționează asupra corpului în intervalul de timp . Cu cât valoarea este mai mică, cu atât este mai apropiată relația de derivată și cu atât forța medie este mai apropiată de valoarea sa instantanee la un moment dat.
În sarcini, de regulă, intervalul de timp este destul de mic. De exemplu, poate fi timpul de impact al mingii cu peretele și apoi - forța medie care acționează asupra mingii din partea laterală a peretelui în timpul impactului.
Se numește vectorul din partea stângă a relației ( 2 ). schimbare de impuls pe parcursul . Modificarea impulsului este diferența dintre vectorii impulsului final și inițial. Și anume, dacă este impulsul corpului într-un moment inițial de timp, este impulsul corpului după o perioadă de timp, atunci schimbarea impulsului este diferența:
Subliniem încă o dată că modificarea impulsului este diferența de vectori (Fig. 1):
De exemplu, mingea zboară perpendicular pe perete (impulsul înainte de impact este ) și revine fără pierderi de viteză (impulsul după impact este ). În ciuda faptului că impulsul modulo nu s-a schimbat (), există o schimbare a impulsului:
Geometric, această situație este prezentată în fig. 2:
Modulul de modificare a impulsului, după cum vedem, este egal cu de două ori modulul impulsului inițial al mingii: .
Să rescriem formula ( 2 ) după cum urmează:
, ( 3 )
sau, scriind modificarea impulsului ca mai sus:
Valoarea este numită impuls de forță. Nu există o unitate specială de măsură pentru impulsul de forță; dimensiunea impulsului de forță este pur și simplu produsul dintre dimensiunile forței și timpului:
(Rețineți că se dovedește a fi o altă unitate de măsură posibilă pentru impulsul corpului.)
Formularea verbală a egalității ( 3 ) este următoarea: modificarea impulsului corpului este egală cu impulsul forței care acționează asupra corpului pentru o anumită perioadă de timp. Aceasta, desigur, este din nou a doua lege a lui Newton în formă impulsivă.
Exemplu de calcul al forței
Ca exemplu de aplicare a celei de-a doua legi a lui Newton în formă impulsivă, să luăm în considerare următoarea problemă.
O sarcină.
O minge de masă r, care zboară orizontal cu o viteză de m/s, lovește un perete vertical neted și sare de pe acesta fără pierderi de viteză. Unghiul de incidență al mingii (adică unghiul dintre direcția mingii și perpendiculara pe perete) este . Lovitura durează s. Găsiți puterea medie
acționând asupra mingii în timpul impactului.
Soluţie.În primul rând, vom arăta că unghiul de reflexie este egal cu unghiul de incidență, adică mingea va sări de pe perete la același unghi (Fig. 3).
Conform (3) avem: . Rezultă că vectorul de schimbare a impulsului co-regizat cu vectorul , adică direcționat perpendicular pe perete spre revenirea mingii (Fig. 5).
 |
| Orez. 5. La sarcină |
Vectori și
egal în modul
(deoarece viteza mingii nu s-a schimbat). Prin urmare, triunghiul format din vectorii , și , este isoscel. Aceasta înseamnă că unghiul dintre vectori și este egal cu , adică unghiul de reflexie este într-adevăr egal cu unghiul de incidență.
Acum rețineți că triunghiul nostru isoscel are un unghi (acesta este unghiul de incidență); deci acest triunghi este echilateral. De aici:
Și apoi forța medie dorită care acționează asupra mingii:
Impulsul sistemului corpului
Să începem cu o situație simplă a unui sistem cu două corpuri. Și anume, să fie corpul 1 și corpul 2 cu momente și respectiv. Impulsul sistemului de date corporale este suma vectorială a impulsurilor fiecărui corp:
Rezultă că pentru impulsul unui sistem de corpuri există o formulă similară celei de-a doua legi a lui Newton sub forma ( 1 ). Să derivăm această formulă.
Toate celelalte obiecte cu care interacționează corpurile 1 și 2 luate în considerare, le vom numi corpuri externe. Se numesc fortele cu care corpurile externe actioneaza asupra corpurilor 1 si 2 forțe externe. Fie - forța externă rezultată care acționează asupra corpului 1. În mod similar - forța externă rezultată care acționează asupra corpului 2 (Fig. 6).
În plus, corpurile 1 și 2 pot interacționa între ele. Fie corpul 2 să acționeze asupra corpului 1 cu forță. Apoi corpul 1 acţionează asupra corpului 2 cu forţă. Conform celei de-a treia legi a lui Newton, forțele și sunt egale ca valoare absolută și opuse ca direcție: . Forțe și este Forta interioara, care operează în sistem.
Să scriem pentru fiecare corp 1 și 2 a doua lege a lui Newton sub forma ( 1 ):
, ( 4 )
. ( 5 )
Să adunăm egalitățile ( 4 ) și ( 5 ):
În partea stângă a egalității rezultate se află suma derivatelor, care este egală cu derivata sumei vectorilor și . În partea dreaptă avem, în virtutea celei de-a treia legi a lui Newton:
Dar - acesta este impulsul sistemului de corpuri 1 și 2. De asemenea, notăm - aceasta este rezultanta forțelor externe care acționează asupra sistemului. Primim:
. ( 6 )
În acest fel, rata de schimbare a impulsului unui sistem de corpuri este rezultanta forțelor externe aplicate sistemului. Egalitatea ( 6 ), care joacă rolul celei de-a doua legi a lui Newton pentru sistemul de corpuri, este ceea ce am vrut să obținem.
Formula (6) a fost derivată pentru cazul a două corpuri. Să ne generalizăm acum raționamentul la cazul unui număr arbitrar de corpuri din sistem.
Impulsul sistemului de corpuri corpurile se numește suma vectorială a impulsurilor tuturor corpurilor incluse în sistem. Dacă sistemul este format din corpuri, atunci impulsul acestui sistem este egal cu:
Apoi totul se face exact în același mod ca mai sus (doar că din punct de vedere tehnic pare puțin mai complicat). Dacă pentru fiecare corp scriem egalități similare cu (4) și (5), și apoi adunăm toate aceste egalități, atunci în partea stângă obținem din nou derivata impulsului sistemului, iar în partea dreaptă doar suma forțelor externe rămâne (forțele interne, însumate în perechi, vor da zero datorită legii a treia a lui Newton). Prin urmare, egalitatea (6) va rămâne valabilă în cazul general.
Legea conservării impulsului
Sistemul corpului este numit închis dacă acțiunile corpurilor externe asupra corpurilor unui sistem dat sunt fie neglijabile, fie se compensează reciproc. Astfel, în cazul unui sistem închis de corpuri, doar interacțiunea acestor corpuri între ele este esențială, dar nu și cu orice alte corpuri.
Rezultanta forțelor externe aplicate unui sistem închis este egală cu zero: . În acest caz, din (6) obținem:
Dar dacă derivata vectorului dispare (rata de schimbare a vectorului este zero), atunci vectorul în sine nu se schimbă cu timpul:
Legea conservării impulsului. Momentul unui sistem închis de corpuri rămâne constant în timp pentru orice interacțiune a corpurilor în cadrul acestui sistem.
Cele mai simple probleme ale legii conservării impulsului sunt rezolvate conform schemei standard, pe care o vom arăta acum.
O sarcină. Un corp de masă r se mișcă cu o viteză m/s pe o suprafață orizontală netedă. Un corp de masă r se deplasează spre el cu o viteză de m/s. Are loc un impact absolut inelastic (corpurile se lipesc unul de altul). Găsiți viteza corpurilor după impact.
Soluţie. Situația este prezentată în Fig. 7. Să direcționăm axa în direcția de mișcare a primului corp.
 |
| Orez. 7. La sarcină |
Deoarece suprafața este netedă, nu există frecare. Deoarece suprafața este orizontală și mișcarea are loc de-a lungul ei, forța gravitației și reacția suportului se echilibrează reciproc:
Astfel, suma vectorială a forțelor aplicate sistemului acestor corpuri este egală cu zero. Aceasta înseamnă că sistemul de corpuri este închis. Prin urmare, respectă legea conservării impulsului:
. ( 7 )
Impulsul sistemului înainte de impact este suma impulsurilor corpurilor:
După un impact neelastic, a fost obținut un corp de masă, care se mișcă cu viteza dorită:
Din legea conservării impulsului ( 7 ) avem:
De aici găsim viteza corpului format după impact:
Să trecem la proiecțiile pe axă:
După condiție, avem: m/s, m/s, astfel încât
Semnul minus indică faptul că corpurile lipicioase se mișcă în direcția opusă axei. Viteza tinta: m/s.
Legea conservării proiecției impulsului
Următoarea situație apare adesea în sarcini. Sistemul de corpuri nu este închis (suma vectorială a forțelor externe care acționează asupra sistemului nu este egală cu zero), dar există o astfel de axă, suma proiecțiilor forțelor externe pe axă este zeroîn orice moment al timpului. Apoi putem spune că de-a lungul acestei axe, sistemul nostru de corpuri se comportă ca unul închis, iar proiecția impulsului sistemului pe axă este păstrată.
Să arătăm asta mai strict. Proiectați egalitatea ( 6 ) pe axa :
Dacă proiecția forțelor externe rezultante dispare, atunci
Prin urmare, proiecția este o constantă:
Legea conservării proiecției impulsului. Dacă proiecția pe axa sumei forțelor externe care acționează asupra sistemului este egală cu zero, atunci proiecția impulsului sistemului nu se modifică în timp.
Să ne uităm la un exemplu de problemă specifică, cum funcționează legea conservării proiecției impulsului.
O sarcină. Un băiat de masă, patinând pe gheață netedă, aruncă o piatră de masă cu viteză într-un unghi față de orizont. Găsiți viteza cu care băiatul se rostogolește înapoi după aruncare.
Soluţie. Situația este prezentată schematic în fig. opt . Băiatul este reprezentat ca un dreptunghi.
 |
| Orez. 8. La sarcină |
Elanul sistemului „băiat + piatră” nu este conservat. Acest lucru se vede cel puțin din faptul că după aruncare apare o componentă verticală a impulsului sistemului (și anume componenta verticală a impulsului pietrei), care nu era acolo înainte de aruncare.
Prin urmare, sistemul pe care îl formează băiatul și piatra nu este închis. De ce? Faptul este că suma vectorială a forțelor externe nu este egală cu zero în timpul aruncării. Valoarea este mai mare decât suma, iar din cauza acestui exces apare tocmai componenta verticală a impulsului sistemului.
Cu toate acestea, forțele externe acționează doar vertical (fără frecare). Prin urmare, proiecția impulsului pe axa orizontală este păstrată. Înainte de aruncare, această proiecție era egală cu zero. Direcționând axa în direcția aruncării (astfel încât băiatul să meargă în direcția semiaxei negative), obținem.
impulsul corpului
Momentul unui corp este o mărime egală cu produsul dintre masa corpului și viteza acestuia.
De reținut că vorbim despre un corp care poate fi reprezentat ca punct material. Elanul unui corp ($p$) se mai numește și impulsul. Conceptul de impuls a fost introdus în fizică de René Descartes (1596-1650). Termenul „impuls” a apărut mai târziu (impulsus în latină înseamnă „împingere”). Momentul este o mărime vectorială (cum ar fi viteza) și este exprimată prin formula:
$p↖(→)=mυ↖(→)$
Direcția vectorului impuls coincide întotdeauna cu direcția vitezei.
Unitatea de impuls în SI este impulsul unui corp cu o masă de $1$ kg care se mișcă cu o viteză de $1$ m/s, prin urmare, unitatea de impuls este $1$ kg $·$ m/s.
Dacă o forță constantă acționează asupra unui corp (punct material) în intervalul de timp $∆t$, atunci și accelerația va fi constantă:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
unde, $(υ_1)↖(→)$ și $(υ_2)↖(→)$ sunt vitezele inițiale și finale ale corpului. Înlocuind această valoare în expresia celei de-a doua legi a lui Newton, obținem:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Deschizând parantezele și folosind expresia pentru impulsul corpului, avem:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Aici $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ este modificarea impulsului în timp $∆t$. Atunci ecuația anterioară devine:
$∆p↖(→)=F↖(→)∆t$
Expresia $∆p↖(→)=F↖(→)∆t$ este o reprezentare matematică a celei de-a doua legi a lui Newton.
Produsul unei forțe și durata ei se numește impuls de forță. De aceea modificarea impulsului unui punct este egală cu modificarea impulsului forței care acționează asupra acestuia.
Expresia $∆p↖(→)=F↖(→)∆t$ se numește ecuația mișcării corpului. Trebuie remarcat faptul că aceeași acțiune - o modificare a impulsului unui punct - poate fi obținută printr-o forță mică într-o perioadă lungă de timp și printr-o forță mare într-o perioadă mică de timp.
Impulsul sistemului tel. Legea schimbării impulsului
Impulsul (impulsul) unui sistem mecanic este un vector egal cu suma impulsurilor tuturor punctelor materiale ale acestui sistem:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Legile schimbării și conservării impulsului sunt o consecință a celei de-a doua și a treia legi a lui Newton.
Luați în considerare un sistem format din două corpuri. Forțele ($F_(12)$ și $F_(21)$ din figură, cu care corpurile sistemului interacționează între ele, se numesc interne.
Fie ca, pe lângă forțele interne, forțele externe $(F_1)↖(→)$ și $(F_2)↖(→)$ acționează asupra sistemului. Pentru fiecare corp se poate scrie ecuația $∆p↖(→)=F↖(→)∆t$. Adăugând părțile din stânga și din dreapta acestor ecuații, obținem:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Conform celei de-a treia legi a lui Newton $(F_(12))↖(→)=-(F_(21))↖(→)$.
Prin urmare,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
În partea stângă se află suma geometrică a modificărilor impulsului tuturor corpurilor sistemului, egală cu modificarea impulsului sistemului însuși - $(∆p_(syst))↖(→)$. Având în vedere acest lucru , egalitatea $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ poate fi scrisă:
$(∆p_(sys))↖(→)=F↖(→)∆t$
unde $F↖(→)$ este suma tuturor forțelor externe care acționează asupra corpului. Rezultatul obținut înseamnă că numai forțele externe pot modifica impulsul sistemului, iar modificarea impulsului sistemului este direcționată în același mod ca și forța externă totală. Aceasta este esența legii schimbării în impulsul unui sistem mecanic.
Forțele interne nu pot schimba impulsul total al sistemului. Ele schimbă doar impulsurile corpurilor individuale ale sistemului.
Legea conservării impulsului
Din ecuația $(∆p_(syst))↖(→)=F↖(→)∆t$ urmează legea conservării impulsului. Dacă asupra sistemului nu acționează forțe externe, atunci partea dreaptă a ecuației $(∆p_(syst))↖(→)=F↖(→)∆t$ dispare, ceea ce înseamnă că impulsul total al sistemului rămâne neschimbat. :
$(∆p_(sys))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Se numește un sistem asupra căruia nu acționează forțe externe sau rezultanta forțelor externe este egală cu zero închis.
Legea conservării impulsului spune:
Momentul total al unui sistem închis de corpuri rămâne constant pentru orice interacțiune a corpurilor sistemului între ele.
Rezultatul obţinut este valabil pentru un sistem care conţine un număr arbitrar de corpuri. Dacă suma forțelor externe nu este egală cu zero, dar suma proiecțiilor lor pe o anumită direcție este egală cu zero, atunci proiecția impulsului sistemului pe această direcție nu se modifică. Deci, de exemplu, un sistem de corpuri de pe suprafața Pământului nu poate fi considerat închis din cauza forței gravitaționale care acționează asupra tuturor corpurilor, cu toate acestea, suma proiecțiilor impulsurilor pe direcția orizontală poate rămâne neschimbată (în absență de frecare), deoarece în această direcție forța gravitației nu este valabilă.
Propulsie cu reacție
Luați în considerare exemple care confirmă validitatea legii conservării impulsului.
Să luăm un balon de cauciuc pentru copii, să-l umflem și să-l dăm drumul. Vom vedea că atunci când aerul începe să iasă dintr-o direcție, balonul însuși va zbura în cealaltă direcție. Mișcarea mingii este un exemplu de propulsie cu reacție. Se explică prin legea conservării impulsului: impulsul total al sistemului „minge plus aer în ea” înainte de scurgerea aerului este zero; trebuie să rămână egal cu zero în timpul mișcării; prin urmare, bila se mișcă în direcția opusă direcției de ieșire a jetului și cu o astfel de viteză încât impulsul său este egal în valoare absolută cu impulsul jetului de aer.
propulsie cu reacție numită mișcarea unui corp care are loc atunci când o parte a acestuia se separă de el cu o anumită viteză. Datorită legii conservării impulsului, direcția de mișcare a corpului este opusă direcției de mișcare a părții separate.
Zborurile cu rachete se bazează pe principiul propulsiei cu reacție. O rachetă spațială modernă este o aeronavă foarte complexă. Masa rachetei este suma masei fluidului de lucru (adică gazele fierbinți rezultate din arderea combustibilului și ejectate sub formă de jet) și masa finală sau, după cum se spune, „uscata” a rachetei, rămânând după ejectarea fluidului de lucru din rachetă.
Atunci când un jet de gaz reactiv este aruncat dintr-o rachetă cu viteză mare, racheta însăși se repezi în direcția opusă. Conform legii conservării impulsului, impulsul $m_(p)υ_p$ dobândit de rachetă trebuie să fie egal cu impulsul $m_(gaz) υ_(gaz)$ al gazelor ejectate:
$m_(p)υ_p=m_(gaz) υ_(gaz)$
Rezultă că viteza rachetei
$υ_p=((m_(gaz))/(m_p)) υ_(gaz)$
Din această formulă se poate observa că, cu cât viteza gazelor ejectate este mai mare și cu atât este mai mare raportul dintre masa fluidului de lucru (adică masa combustibilului) și masa finală ("uscata") a rachetei, viteza rachetei este mai mare.
Formula $υ_p=((m_(gaz))/(m_p))·υ_(gaz)$ este aproximativă. Nu ia în considerare faptul că pe măsură ce combustibilul arde, masa rachetei zburătoare devine din ce în ce mai mică. Formula exactă pentru viteza unei rachete a fost obținută în 1897 de K. E. Tsiolkovsky și îi poartă numele.
Munca de forță
Termenul „muncă” a fost introdus în fizică în 1826 de către omul de știință francez J. Poncelet. Dacă în viața de zi cu zi numai munca umană se numește muncă, atunci în fizică și, în special, în mecanică, este general acceptat că munca se face cu forța. Cantitatea fizică de muncă este de obicei indicată cu litera $A$.
Munca de forță- aceasta este o măsură a acțiunii unei forțe, în funcție de modulul și direcția acesteia, precum și de deplasarea punctului de aplicare a forței. Pentru o forță constantă și o mișcare rectilinie, munca este determinată de egalitatea:
$A=F|∆r↖(→)|cosα$
unde $F$ este forța care acționează asupra corpului, $∆r↖(→)$ este deplasarea, $α$ este unghiul dintre forță și deplasare.

Lucrul forței este egal cu produsul dintre modulele forței și deplasării și cosinusul unghiului dintre ele, adică produsul scalar al vectorilor $F↖(→)$ și $∆r↖(→)$.
Munca este o mărime scalară. Dacă $α 0$, iar dacă $90°
Când mai multe forțe acționează asupra unui corp, munca totală (suma muncii tuturor forțelor) este egală cu munca forței rezultate.
Unitatea de lucru SI este joule($1$ J). $1$ J este munca efectuată de o forță de $1$ N pe o cale de $1$ m în direcția acestei forțe. Această unitate este numită după omul de știință englez J. Joule (1818-1889): $1$ J = $1$ N $·$ m. Kilojulii și milijoulii sunt, de asemenea, adesea folosiți: $1$ kJ $= 1.000$ J, $1$ mJ $ = 0,001 $ J.
Lucrarea gravitației
Să considerăm un corp care alunecă de-a lungul unui plan înclinat cu un unghi de înclinare $α$ și o înălțime $H$.

Exprimăm $∆x$ în termeni de $H$ și $α$:
$∆x=(H)/(sinα)$
Considerând că gravitația $F_т=mg$ formează un unghi ($90° - α$) cu direcția de mișcare, folosind formula $∆x=(H)/(sin)α$, obținem o expresie pentru lucrul gravitației $A_g$:
$A_g=mg cos(90°-α)(H)/(sinα)=mgH$
Din această formulă se poate observa că munca gravitației depinde de înălțime și nu depinde de unghiul de înclinare al planului.
Din aceasta rezultă că:
- munca gravitației nu depinde de forma traiectoriei de-a lungul căreia se mișcă corpul, ci doar de poziția inițială și finală a corpului;
- când un corp se mișcă pe o traiectorie închisă, munca gravitației este zero, adică gravitația este o forță conservatoare (forțele conservative sunt forțe care au această proprietate).
Lucrarea forțelor de reacție, este zero deoarece forța de reacție ($N$) este direcționată perpendicular pe deplasarea $∆x$.
Lucrul forței de frecare
Forța de frecare este îndreptată opus deplasării $∆x$ și formează cu ea un unghi $180°$, deci munca forței de frecare este negativă:
$A_(tr)=F_(tr)∆x cos180°=-F_(tr) ∆x$
Deoarece $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ atunci
$A_(tr)=μmgHctgα$
Lucrul forței elastice
Fie ca o forță exterioară $F↖(→)$ să acționeze asupra unui arc neîntins de lungime $l_0$, întinzându-l cu $∆l_0=x_0$. In pozitia $x=x_0F_(control)=kx_0$. După terminarea forţei $F↖(→)$ în punctul $x_0$, arcul este comprimat sub acţiunea forţei $F_(control)$.

Să determinăm lucrul forței elastice atunci când coordonatele capătului drept al arcului se schimbă de la $х_0$ la $х$. Deoarece forța elastică din această zonă se modifică liniar, în legea lui Hooke, valoarea sa medie în această zonă poate fi utilizată:
$F_(ex.av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Atunci lucrarea (ținând cont de faptul că direcțiile $(F_(exp.av.))↖(→)$ și $(∆x)↖(→)$ coincid) este egală cu:
$A_(exercițiu)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Se poate arăta că forma ultimei formule nu depinde de unghiul dintre $(F_(exp.av.))↖(→)$ și $(∆x)↖(→)$. Munca fortelor elastice depinde numai de deformatiile arcului in starea initiala si finala.
Astfel, forța elastică, ca și gravitația, este o forță conservativă.
Puterea forței
Puterea este o mărime fizică măsurată prin raportul dintre muncă și perioada de timp în care este produsă.
Cu alte cuvinte, puterea arată cât de mult se lucrează pe unitatea de timp (în SI, pentru $1$ s).
Puterea este determinată de formula:
unde $N$ este puterea, $A$ este munca efectuată în timpul $∆t$.
Înlocuind $A=F|(∆r)↖(→)|cosα$ în formula $N=(A)/(∆t)$ în locul lucrării $A$, obținem:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Puterea este egală cu produsul dintre modulele vectorilor forță și viteză și cosinusul unghiului dintre acești vectori.
Puterea din sistemul SI este măsurată în wați (W). Un watt ($1$ W) este puterea la care se efectuează $1$ J de lucru în $1$ s: $1$ W $= 1$ J/s.
Această unitate poartă numele inventatorului englez J. Watt (Watt), care a construit primul motor cu abur. Însuși J. Watt (1736-1819) a folosit o unitate diferită de putere - cai putere (CP), pe care a introdus-o pentru a putea compara performanța unui motor cu abur și a unui cal: $ 1 $ CP. $= 735,5 $ mar.
În tehnologie, sunt adesea folosite unități mai mari de putere - kilowați și megawați: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
Energie kinetică. Legea modificării energiei cinetice
Dacă un corp sau mai multe corpuri care interacționează (un sistem de corpuri) pot lucra, atunci ei spun că au energie.
Cuvântul „energie” (din greacă. energia – acțiune, activitate) este adesea folosit în viața de zi cu zi. Deci, de exemplu, oamenii care pot lucra rapid se numesc energici, cu o mare energie.
Energia deținută de un corp datorită mișcării se numește energie cinetică.
Ca și în cazul definiției energiei în general, putem spune despre energia cinetică că energia cinetică este capacitatea unui corp în mișcare de a lucra.
Să aflăm energia cinetică a unui corp de masă $m$ care se mișcă cu o viteză de $υ$. Deoarece energia cinetică este energia datorată mișcării, starea zero pentru aceasta este starea în care corpul este în repaus. După ce am găsit munca necesară pentru a comunica corpului o viteză dată, vom găsi energia cinetică a acestuia.
Pentru aceasta, calculăm munca efectuată pe secțiunea de deplasare $∆r↖(→)$ când direcțiile vectorilor forțe $F↖(→)$ și deplasarea $∆r↖(→)$ coincid. În acest caz, munca este
unde $∆x=∆r$

Pentru mișcarea unui punct cu accelerația $α=const$, expresia pentru mișcare are forma:
$∆x=υ_1t+(la^2)/(2),$
unde $υ_1$ este viteza inițială.
Înlocuind expresia pentru $∆x$ din $∆x=υ_1t+(at^2)/(2)$ în ecuația $A=F ∆x$ și folosind a doua lege a lui Newton $F=ma$, obținem:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Exprimând accelerația în termeni de viteze inițiale $υ_1$ și finale $υ_2$ $a=(υ_2-υ_1)/(t)$ și înlocuirea în $A=ma(υ_1t+(at^2)/(2))=( mat)/ (2)(2υ_1+at)$ avem:
$A=(m(υ_2-υ_1))/(2) (2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Acum echivalând viteza inițială cu zero: $υ_1=0$, obținem o expresie pentru energie kinetică:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Astfel, un corp în mișcare are energie cinetică. Această energie este egală cu munca care trebuie făcută pentru a crește viteza corpului de la zero la $υ$.
Din $E_K=(mυ)/(2)=(p^2)/(2m)$ rezultă că munca unei forțe pentru a muta un corp dintr-o poziție în alta este egală cu modificarea energiei cinetice:
$A=E_(K_2)-E_(K_1)=∆E_K$
Egalitatea $A=E_(K_2)-E_(K_1)=∆E_K$ exprimă teorema privind modificarea energiei cinetice.
Modificarea energiei cinetice a corpului(punct material) pentru o anumită perioadă de timp este egală cu munca efectuată în acest timp de forța care acționează asupra corpului.
Energie potențială
Energia potențială este energia determinată de aranjarea reciprocă a corpurilor sau părților aceluiași corp care interacționează.
Deoarece energia este definită ca abilitatea unui corp de a lucra, energia potențială este definită în mod natural ca munca unei forțe care depinde doar de poziția relativă a corpurilor. Aceasta este munca gravitației $A=mgh_1-mgh_2=mgH$ și munca elasticității:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Energia potențială a corpului interacțiunea cu Pământul se numește valoarea egală cu produsul dintre masa $m$ a acestui corp și accelerația de cădere liberă $g$ și înălțimea $h$ a corpului deasupra suprafeței Pământului:
Energia potențială a unui corp deformat elastic este valoarea egală cu jumătate din produsul dintre coeficientul de elasticitate (rigiditatea) $k$ al corpului și pătratul deformației $∆l$:
$E_p=(1)/(2)k∆l^2$
Lucrarea forțelor conservatoare (gravitație și elasticitate), ținând cont de $E_p=mgh$ și $E_p=(1)/(2)k∆l^2$, se exprimă astfel:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Această formulă ne permite să oferim o definiție generală a energiei potențiale.
Energia potențială a sistemului este o mărime care depinde de poziția corpurilor, a cărei schimbare în timpul tranziției sistemului de la starea inițială la starea finală este egală cu munca forțelor conservatoare interne ale sistemului, luate cu semnul opus.
Semnul minus din partea dreaptă a ecuației $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ înseamnă că atunci când munca este efectuată de forțe interne ( de exemplu, căderea corpului la pământ sub acțiunea gravitației în sistemul „piatră-Pământ”), energia sistemului scade. Munca și schimbarea energiei potențiale într-un sistem au întotdeauna semne opuse.
Deoarece munca determină doar schimbarea energiei potențiale, numai schimbarea energiei are sens fizic în mecanică. Prin urmare, alegerea nivelului de energie zero este arbitrară și este determinată numai de considerente de comoditate, de exemplu, ușurința de a scrie ecuațiile corespunzătoare.
Legea schimbării și conservării energiei mecanice
Energia mecanică totală a sistemului suma energiilor sale cinetice și potențiale se numește:
Este determinată de poziția corpurilor (energia potențială) și viteza acestora (energia cinetică).
Conform teoremei energiei cinetice,
$E_k-E_(k_1)=A_p+A_(pr),$
unde $А_р$ este munca forțelor potențiale, $А_(pr)$ este munca forțelor nepotențiale.
La rândul său, munca forțelor potențiale este egală cu diferența de energie potențială a corpului în stările inițiale $E_(p_1)$ și finale $E_p$. Având în vedere acest lucru, obținem o expresie pentru legea schimbarii energiei mecanice:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
unde partea stângă a egalității este modificarea energiei mecanice totale, iar partea dreaptă este opera forțelor nepotențiale.
Asa de, legea schimbarii energiei mecanice citeste:
Modificarea energiei mecanice a sistemului este egală cu munca tuturor forțelor nepotențiale.
Un sistem mecanic în care acționează numai forțe potențiale se numește conservator.
Într-un sistem conservator $A_(pr) = 0$. asta implică legea conservării energiei mecanice:
Într-un sistem conservator închis, energia mecanică totală este conservată (nu se modifică în timp):
$E_k+E_p=E_(k_1)+E_(p_1)$
Legea conservării energiei mecanice este derivată din legile mecanicii newtoniene, care sunt aplicabile unui sistem de puncte materiale (sau macroparticule).
Totuși, legea conservării energiei mecanice este valabilă și pentru un sistem de microparticule, unde legile lui Newton în sine nu se mai aplică.
Legea conservării energiei mecanice este o consecință a omogenității timpului.
Uniformitatea timpului este că, în aceleași condiții inițiale, cursul proceselor fizice nu depinde de momentul în care se creează aceste condiții.
Legea conservării energiei mecanice totale înseamnă că atunci când energia cinetică într-un sistem conservator se modifică, trebuie să se modifice și energia potențială a acestuia, astfel încât suma lor să rămână constantă. Aceasta înseamnă posibilitatea de a converti un tip de energie în altul.
În conformitate cu diferitele forme de mișcare a materiei, se consideră diferite tipuri de energie: mecanică, internă (egale cu suma energiei cinetice a mișcării haotice a moleculelor în raport cu centrul de masă al corpului și energia potențială a interacțiunea moleculelor între ele), electromagnetică, chimică (care constă din energia cinetică a mișcării electronilor și electrică din energia interacțiunii lor între ele și cu nucleele atomice), energia nucleară etc. Se poate observa din mai sus că împărțirea energiei în diferite tipuri este destul de arbitrară.
Fenomenele naturale sunt de obicei însoțite de transformarea unui tip de energie în altul. Deci, de exemplu, frecarea părților diferitelor mecanisme duce la conversia energiei mecanice în căldură, adică în energie interna.În motoarele termice, dimpotrivă, energia internă este transformată în energie mecanică; în celulele galvanice, energia chimică este transformată în energie electrică etc.
În prezent, conceptul de energie este unul dintre conceptele de bază ale fizicii. Acest concept este indisolubil legat de ideea transformării unei forme de mișcare în alta.
Iată cum este formulat conceptul de energie în fizica modernă:
Energia este o măsură cantitativă generală a mișcării și interacțiunii tuturor tipurilor de materie. Energia nu ia naștere din nimic și nu dispare, ea poate trece doar de la o formă la alta. Conceptul de energie leagă împreună toate fenomenele naturii.
mecanisme simple. eficienta mecanismului
Mecanismele simple sunt dispozitive care modifică amploarea sau direcția forțelor aplicate corpului.
Sunt folosite pentru a muta sau ridica încărcături mari cu puțin efort. Acestea includ pârghia și varietățile sale - blocuri (mobile și fixe), o poartă, un plan înclinat și varietățile sale - o pană, un șurub etc.
Maneta. Regula pârghiei
Pârghia este un corp rigid capabil să se rotească în jurul unui suport fix.

Regula efectului de pârghie spune:
O pârghie este în echilibru dacă forțele aplicate acesteia sunt invers proporționale cu brațele lor:
$(F_2)/(F_1)=(l_1)/(l_2)$
Din formula $(F_2)/(F_1)=(l_1)/(l_2)$, aplicându-i proprietatea proporției (produsul termenilor extremi ai proporției este egal cu produsul termenilor ei medii), avem se poate obtine urmatoarea formula:
Dar $F_1l_1=M_1$ este momentul forței care tinde să rotească pârghia în sensul acelor de ceasornic, iar $F_2l_2=M_2$ este momentul forței care tinde să rotească pârghia în sens invers acelor de ceasornic. Astfel, $M_1=M_2$, ceea ce urma să fie demonstrat.
Pârghia a început să fie folosită de oameni în cele mai vechi timpuri. Cu ajutorul acestuia, a fost posibilă ridicarea plăcilor grele de piatră în timpul construcției piramidelor din Egiptul antic. Fără pârghie, acest lucru nu ar fi fost posibil. Într-adevăr, de exemplu, pentru construcția piramidei lui Keops, care are o înălțime de 147$ m, s-au folosit peste două milioane de blocuri de piatră, dintre care cel mai mic avea o masă de $2,5$ tone!
În zilele noastre, pârghiile sunt utilizate pe scară largă atât în producție (de exemplu, macarale), cât și în viața de zi cu zi (foarfece, tăietori de sârmă, cântare).
Bloc fix
Acțiunea unui bloc fix este similară cu acțiunea unei pârghii cu pârghie egală: $l_1=l_2=r$. Forța aplicată $F_1$ este egală cu sarcina $F_2$, iar starea de echilibru este:
Bloc fix folosit atunci când trebuie să schimbați direcția unei forțe fără a-i modifica magnitudinea.
Bloc mobil
Blocul mobil acționează similar unei pârghii, ale cărei brațe sunt: $l_2=(l_1)/(2)=r$. În acest caz, starea de echilibru are forma:
unde $F_1$ este forța aplicată, $F_2$ este sarcina. Utilizarea unui bloc mobil oferă un câștig în forță de două ori.
Polyspast (sistem de blocuri)
Un palan obișnuit cu lanț este format din $n$ blocuri mobile și $n$ blocuri fixe. Aplicarea acestuia oferă un câștig în putere de 2n$ de ori:
$F_1=(F_2)/(2n)$
Palan cu lanț electric constă din n bloc mobil și un bloc fix. Utilizarea unui palan cu lanț oferă un câștig în putere de $2^n$ ori:
$F_1=(F_2)/(2^n)$

Şurub
Șurubul este un plan înclinat înfășurat pe axă.

Condiția pentru echilibrarea forțelor care acționează asupra șurubului are forma:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

unde $F_1$ este o forță externă aplicată șurubului și care acționează la o distanță $R$ de axa acestuia; $F_2$ este forța care acționează în direcția axei șurubului; $h$ - pasul șurubului; $r$ este raza medie a firului; $α$ este unghiul firului. $R$ este lungimea pârghiei (cheii) care rotește șurubul cu forța $F_1$.
Eficienţă
Coeficientul de performanță (COP) - raportul dintre munca utilă și toată munca cheltuită.
Eficiența este adesea exprimată ca procent și notat cu litera greacă $η$ ("aceasta"):
$η=(A_p)/(A_3) 100%$
unde $A_n$ este munca utilă, $A_3$ este toată munca cheltuită.
Munca utilă este întotdeauna doar o parte din munca totală pe care o cheltuiește o persoană utilizând acest sau acel mecanism.
O parte din munca depusă este cheltuită pentru depășirea forțelor de frecare. Deoarece $А_3 > А_п$, eficiența este întotdeauna mai mică de $1$ (sau $< 100%$).
Deoarece fiecare dintre lucrările din această ecuație poate fi exprimată ca produsul dintre forța corespunzătoare și distanța parcursă, ea poate fi rescrisă după cum urmează: $F_1s_1≈F_2s_2$.
De aici rezultă că, câștigând cu ajutorul mecanismului în vigoare, pierdem același număr de ori pe parcurs și invers. Această lege se numește regula de aur a mecanicii.
Regula de aur a mecanicii este o lege aproximativă, deoarece nu ia în considerare munca de depășire a frecării și gravitației pieselor dispozitivelor utilizate. Cu toate acestea, poate fi foarte util atunci când se analizează funcționarea oricărui mecanism simplu.

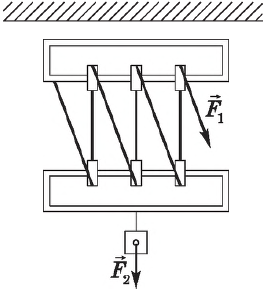
Deci, de exemplu, datorită acestei reguli, putem spune imediat că muncitorul prezentat în figură, cu un câștig dublu în forța de ridicare de $10$ cm, va trebui să coboare capătul opus al pârghiei cu $20$ cm.
Ciocnirea corpurilor. Impacturi elastice și inelastice
Legile conservării impulsului și energiei mecanice sunt folosite pentru a rezolva problema mișcării corpurilor după o coliziune: momentele și energiile cunoscute înainte de ciocnire sunt folosite pentru a determina valorile acestor mărimi după ciocnire. Luați în considerare cazurile de impact elastic și inelastic.
Se numește impact absolut inelastic, după care corpurile formează un singur corp care se mișcă cu o anumită viteză. Problema vitezei acestuia din urmă se rezolvă folosind legea conservării impulsului pentru un sistem de corpuri cu mase $m_1$ și $m_2$ (dacă vorbim de două corpuri) înainte și după impact:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
În mod evident, energia cinetică a corpurilor nu este conservată în timpul unui impact inelastic (de exemplu, la $(υ_1)↖(→)=-(υ_2)↖(→)$ și $m_1=m_2$ devine egală cu zero după impact).
Se numește impact absolut elastic, în care nu se păstrează doar suma impulsurilor, ci și suma energiilor cinetice ale corpurilor care se ciocnesc.
Pentru un impact absolut elastic, ecuațiile
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2) )^2)/(2)$
unde $m_1, m_2$ sunt masele bilelor, $υ_1, υ_2$ sunt vitezele bilelor înainte de impact, $υ"_1, υ"_2$ sunt vitezele bilelor după impact.
Impulsul de forță și impulsul corpului
După cum se arată, a doua lege a lui Newton poate fi scrisă ca
Ft=mv-mv o=p-p o=D p.
Se numește mărimea vectorială Ft, egală cu produsul forței și timpul acțiunii acesteia impuls de forță. Mărimea vectorială p=mv, care este egală cu produsul dintre masa corpului și viteza acestuia, se numește impulsul corpului.
În SI, unitatea de măsură este impulsul unui corp cu o masă de 1 kg care se mișcă cu o viteză de 1 m/s, adică. unitatea de măsură este kilogramul pe secundă (1 kg m/s).
Modificarea impulsului corpului D p în timpul t este egală cu impulsul forței Ft care acționează asupra corpului în acest timp.
Conceptul de impuls este unul dintre conceptele fundamentale ale fizicii. Momentul unui corp este una dintre mărimile capabile, în anumite condiții, să-și mențină valoarea neschimbată.(dar modulo și în direcție).
Conservarea impulsului total al unui sistem închis
sistem închis numiți un grup de corpuri care nu interacționează cu alte corpuri care nu fac parte din acest grup. Forțele de interacțiune dintre corpurile dintr-un sistem închis se numesc intern. (Forțele interne sunt de obicei notate cu litera f).
Luați în considerare interacțiunea corpurilor într-un sistem închis. Lăsați două bile de același diametru, făcute din substanțe diferite (adică având mase diferite), să se rostogolească pe o suprafață orizontală perfect netedă și să se ciocnească între ele. În timpul impactului, pe care îl vom considera central și absolut elastic, vitezele și momentele bilelor se modifică. Fie masa primei bile m 1 , viteza ei înainte de impact V 1 , și după impact V 1 "; masa celei de-a doua bile m 2 , viteza sa înainte de impact v 2 , după impact v 2 ". Conform celei de-a treia legi a lui Newton, forțele de interacțiune dintre bile sunt egale ca valoare absolută și opusă ca direcție, i.e. f 1 \u003d -f 2.
Conform celei de-a doua legi a lui Newton, modificarea momentului bilelor ca urmare a ciocnirii lor este egală cu impulsul forțelor de interacțiune dintre ele, i.e.
m 1 v 1 "-m 1 v 1 \u003d f 1 t (3.1)
m 2 v 2 "-m 2 v 2 \u003d f 2 t (3.2)
unde t este timpul de interacțiune al bilelor.
Adăugând expresiile (3.1) și (3.2) termen cu termen, constatăm că
m 1 v 1 "-m 1 v 1 + m 2 v 2 "-m 2 v 2 \u003d 0.
Prin urmare,
m 1 v 1 "+m 2 v 2" \u003d m 1 v 1 + m 2 v 2
sau altfel
p 1 "+p 2" \u003d p 1 + p 2. (3,3)
Să notăm p 1 "+p 2 "=p" și p 1 +p 2 =p.
Se numește suma vectorială a impulsurilor tuturor corpurilor incluse în sistem impulsul deplin al acestui sistem. Din (3.3) se poate observa că p "= p, adică p" - p \u003d D p \u003d 0, prin urmare,
p=p 1 +p 2 = const.
Formula (3.4) exprimă legea conservării impulsului într-un sistem închis, care se formulează după cum urmează: impulsul total al unui sistem închis de corpuri rămâne constant pentru orice interacțiuni ale corpurilor acestui sistem între ele.
Cu alte cuvinte, forțele interne nu pot schimba impulsul total al sistemului nici în valoare absolută, nici în direcție.
Modificarea impulsului total al unui sistem deschis
Un grup de corpuri care interacționează nu numai între ele, ci și cu corpuri care nu fac parte din acest grup, se numește sistem deschis. Forțele cu care corpurile care nu sunt incluse în acest sistem acționează asupra corpurilor unui anumit sistem sunt numite forțe externe (de obicei forțele externe sunt notate cu litera F).
Luați în considerare interacțiunea a două corpuri într-un sistem deschis. Schimbarea impulsurilor acestor corpuri are loc atât sub acțiunea forțelor interne, cât și sub acțiunea forțelor externe.
Conform celei de-a doua legi a lui Newton, modificările momentului corpurilor luate în considerare pentru primul și al doilea corp sunt
D p 1 \u003d f 1 t + F 1 t (3,5)
D p 2 \u003d f 2 t + F 2 t (3,6)
unde t este timpul de acțiune al forțelor externe și interne.
Adăugând expresiile (3.5) și (3.6) termen cu termen, constatăm că
D (p 1 +p 2)=(f 1 +f 2)t +(F 1 +F 2)t (3.7)
În această formulă, p \u003d p 1 + p 2 - impulsul total al sistemului, f 1 + f 2 \u003d 0 (deoarece, conform celei de-a treia legi a lui Newton (f 1 \u003d -f 2), F 1 + F 2 \u003d F este rezultanta tuturor forțelor externe , care acționează asupra corpurilor sistemului dat Având în vedere ceea ce s-a spus, formula (3.7) ia forma
Dp=Ft. (3,8)
Din (3.8) se vede că impulsul total al sistemului se modifică numai sub acţiunea forţelor externe. Dacă sistemul este închis, adică F=0, atunci D p=0 și, în consecință, p=const. Astfel, formula (3.4) este un caz special al formulei (3.8), care arată în ce condiții se păstrează impulsul total al sistemului și în ce condiții se modifică.
Propulsie cu reacție.
Semnificația lucrării lui Tsiolkovsky pentru astronautică
Mișcarea unui corp care are loc ca urmare a separării unei părți din masa sa de el cu o anumită viteză se numește reactiv.
Toate tipurile de mișcare, cu excepția celei reactive, sunt imposibile fără prezența unor forțe externe unui sistem dat, adică fără interacțiunea corpurilor acestui sistem cu mediul înconjurător și pentru implementarea propulsiei cu reacție nu este necesară interacțiunea corpului cu mediul. Inițial, sistemul este în repaus, adică impulsul său total este zero. Când o parte a masei sale începe să fie ejectată din sistem cu o anumită viteză, atunci (întrucât impulsul total al unui sistem închis, conform legii conservării impulsului, trebuie să rămână neschimbat), sistemul primește o viteză direcționată în direcția opusă. Într-adevăr, deoarece m 1 v 1 + m 2 v 2 \u003d 0, atunci m 1 v 1 \u003d -m 2 v 2, adică.
v 2 \u003d -v 1 m 1 / m 2.
Din această formulă rezultă că viteza v 2 obţinută de un sistem cu masa m 2 depinde de masa ejectată m 1 şi de viteza v 1 de ejectare a acestuia.
Un motor termic în care forța de împingere care decurge din reacția unui jet de gaze fierbinți emise este aplicată direct corpului său se numește motor cu reacție. Spre deosebire de alte vehicule, un dispozitiv cu reacție se poate deplasa prin spațiul cosmic.
Fondatorul teoriei zborurilor spațiale este remarcabilul om de știință rus Ciolkovski (1857 - 1935). El a oferit bazele generale ale teoriei propulsiei cu reacție, a dezvoltat principiile și schemele de bază ale aeronavelor cu reacție și a demonstrat necesitatea utilizării unei rachete în mai multe etape pentru zborurile interplanetare. Ideile lui Tsiolkovsky au fost implementate cu succes în URSS în construcția sateliților artificiali Pământului și a navelor spațiale.
Fondatorul astronauticii practice este omul de știință sovietic academicianul Korolev (1906 - 1966). Sub conducerea sa, a fost creat și lansat primul satelit artificial din lume al Pământului, a avut loc primul zbor spațial cu echipaj din istoria omenirii. Primul cosmonaut al Pământului a fost sovieticul Yu.A. Gagarin (1934 - 1968).
Întrebări pentru autocontrol:
- Cum se scrie a doua lege a lui Newton în formă impulsivă?
- Ce se numește impulsul forței? impulsul corpului?
- Ce sistem de corpuri se numește închis?
- Ce se numesc forte interne?
- Folosind exemplul interacțiunii a două corpuri într-un sistem închis, arătați cum se stabilește legea conservării impulsului. Cum este formulat?
- Care este impulsul total al unui sistem?
- Pot forțele interne să modifice impulsul total al sistemului?
- Ce sistem de corpuri se numește deschis?
- Ce forțe se numesc externe?
- Stabiliți o formulă care să arate în ce condiții se modifică impulsul total al sistemului și în ce condiții este păstrat.
- Ce este o mișcare reactivă?
- Poate să apară fără interacțiunea corpului în mișcare cu mediul?
- Care este legea propulsiei cu reacție?
- Care este semnificația lucrării lui Tsiolkovsky pentru astronautică?
Dacă pe un corp de masă m pentru o anumită perioadă de timp Δ t acționează forța F →, apoi urmează modificarea vitezei corpului ∆ v → = v 2 → - v 1 →. Obținem că în timpul Δ t corpul continuă să se miște cu accelerație:
a → = ∆ v → ∆ t = v 2 → - v 1 → ∆ t .
Pe baza legii de bază a dinamicii, adică a doua lege a lui Newton, avem:
F → = m a → = m v 2 → - v 1 → ∆ t sau F → ∆ t = m v 2 → - m v 1 → = m ∆ v → = ∆ m v → .
Definiția 1impulsul corpului, sau cantitatea de mișcare este o mărime fizică egală cu produsul dintre masa corpului și viteza de mișcare a acestuia.
Momentul unui corp este considerat o mărime vectorială, care se măsoară în kilogram-metru pe secundă (k g m / s).
Definiția 2
Impulsul de forta este o mărime fizică egală cu produsul forței și timpul acțiunii acesteia.
Momentul este denumit mărimi vectoriale. Există o altă formulare a definiției.
Definiția 3
Modificarea impulsului corpului este egală cu impulsul forței.
Cu impulsul notat p → a doua lege a lui Newton se scrie ca:
F → ∆t = ∆p → .
Această formă ne permite să formulăm a doua lege a lui Newton. Forța F → este rezultanta tuturor forțelor care acționează asupra corpului. Egalitatea este scrisă ca proiecții pe axele de coordonate ale vederii:
F x Δ t = Δ p x ; F y ∆t = ∆p y ; Fz ∆t = ∆pz .
Poza 1. 16 . unu . Modelul de impuls al corpului.
Modificarea proiecției impulsului corpului pe oricare dintre cele trei axe reciproc perpendiculare este egală cu proiecția impulsului forței pe aceeași axă.
Definiția 4
Mișcare unidimensională este mișcarea unui corp de-a lungul uneia dintre axele de coordonate.
Exemplul 1
Ca exemplu, luați în considerare căderea liberă a unui corp cu viteza inițială v 0 sub acțiunea gravitației pe o perioadă de timp t. Când direcția axei O Y este vertical în jos, impulsul gravitației F t \u003d mg, care acționează în timpul t, este egal m g t. Un astfel de impuls este egal cu o schimbare a impulsului corpului:
F t t \u003d m g t \u003d Δ p \u003d m (v - v 0), de unde v \u003d v 0 + g t.
Intrarea coincide cu formula cinematică pentru determinarea vitezei mișcării uniform accelerate. Modulul de forță nu se modifică de la întregul interval t. Când este variabilă ca mărime, atunci formula impulsului necesită înlocuirea valorii medii a forței F cu p din intervalul de timp t. Poza 1. 16 . 2 arată cum este determinată impulsul unei forțe care depinde de timp.

Poza 1. 16 . 2. Calculul impulsului de forță din graficul lui F (t)
Este necesar să alegeți intervalul Δ t pe axa timpului, este clar că forța F(t) practic neschimbat. Impulsul de forță F (t) Δ t pentru o perioadă de timp Δ t va fi egală cu aria figurii umbrite. La împărțirea axei timpului în intervale cu Δ t i pe intervalul de la 0 la t, se adună impulsurile tuturor forțelor care acționează din aceste intervale Δ t i , atunci impulsul total al forței va fi egal cu aria de formare folosind axele în trepte și timp.
Aplicând limita (Δ t i → 0) , puteți găsi aria care va fi limitată de grafic F(t) iar axa t. Utilizarea definiției impulsului de forță din program este aplicabilă cu orice legi în care există forțe și timp în schimbare. Această soluție duce la integrarea funcției F(t) din intervalul [ 0 ; t] .
Poza 1. 16 . 2 arată impulsul forței, care se află în intervalul de la t 1 = 0 s la t 2 = 10 .
Din formulă obținem că F c p (t 2 - t 1) \u003d 1 2 F m a x (t 2 - t 1) \u003d 100 N s \u003d 100 kg m / s.
Adică, exemplul arată F cu p \u003d 1 2 F m a x \u003d 10 N.
Există cazuri când determinarea forței medii F cu p este posibilă cu timpul cunoscut și date despre impulsul raportat. Cu un impact puternic asupra unei mingi cu o masă de 0,415 kg, poate fi raportată o viteză egală cu v \u003d 30 m / s. Timpul de impact aproximativ este de 8 10 – 3 s.
Apoi formula impulsului ia forma:
p = m v = 12,5 kg g m/s.
Pentru a determina forța medie F c p în timpul impactului, este necesar F c p = p ∆ t = 1,56 10 3 N.
Am obținut o valoare foarte mare, care este egală cu un corp cu o masă de 160 kg.
Când mișcarea are loc pe o cale curbă, atunci valoarea inițială p 1 → și finală
p 2 → poate fi diferit ca modul si directie. Pentru a determina impulsul ∆ p → folosiți diagrama momentului, unde există vectori p 1 → și p 2 → , și ∆ p → = p 2 → - p 1 → construiți după regula paralelogramului.
Exemplul 2
Figura 1 este prezentată ca exemplu. 16 . 2, unde este desenată o diagramă a impulsurilor unei mingi care sare de un perete. La servire, o minge cu masa m cu viteza v 1 → lovește suprafața la un unghi α față de normală și sare cu viteza v 2 → cu un unghi β . La lovirea de perete, mingea a fost supusă forței F → îndreptate în același mod ca vectorul ∆ p → .

Poza 1. 16 . 3 . Mingea a revenit dintr-un perete dur și diagramă de impuls.
Dacă există o cădere normală a unei mingi cu masa m pe o suprafață elastică cu viteza v 1 → = v → , atunci la revenire se va schimba în v 2 → = - v → . Aceasta înseamnă că pentru o anumită perioadă de timp impulsul se va modifica și va fi egal cu ∆ p → = - 2 m v → . Folosind proiecții pe ОХ, rezultatul va fi scris ca Δ p x = – 2 m v x . Din desen 1 . 16 . 3 se poate observa că axa ОХ este îndreptată departe de perete, apoi v x< 0 и Δ p x >0 . Din formula obținem că modulul Δ p este asociat cu modulul vitezei, care ia forma Δ p = 2 m v .
Dacă observați o greșeală în text, vă rugăm să o evidențiați și să apăsați Ctrl+Enter
Puls (Cantitatea de mișcare) este o mărime fizică vectorială, care este o măsură a mișcării mecanice a corpului. În mecanica clasică, impulsul unui corp este egal cu produsul masei m acest corp la viteza lui v, direcția impulsului coincide cu direcția vectorului viteză:
Momentul sistemului particule este suma vectorială a momentului particulelor sale individuale: p=(sume) pi, Unde pi este impulsul particulei i-a.
Teorema privind modificarea impulsului sistemului: impulsul total al sistemului poate fi modificat numai prin acțiunea forțelor externe: Fext=dp/dt(1), adică. derivata în timp a impulsului sistemului este egală cu suma vectorială a tuturor forțelor externe care acționează asupra particulelor sistemului. Ca și în cazul unei singure particule, din expresia (1) rezultă că creșterea impulsului sistemului este egală cu impulsul rezultantei tuturor forțelor externe pentru perioada corespunzătoare de timp:
p2-p1= t & 0 F ext dt.
În mecanica clasică, complet impuls sistemul de puncte materiale se numește mărime vectorială egală cu suma produselor maselor punctelor materiale la viteza lor:
![]()
în consecință, mărimea se numește impulsul unui punct material. Este o mărime vectorială direcționată în aceeași direcție cu viteza particulei. Unitatea de măsură a impulsului în Sistemul Internațional de Unități (SI) este kilogram metru pe secundă(kg m/s).
Dacă avem de-a face cu un corp de mărime finită, care nu este format din puncte materiale discrete, pentru a-i determina impulsul, este necesar să spargem corpul în părți mici, care pot fi considerate puncte materiale și să însumăm peste ele, ca un rezultat obținem:
Momentul unui sistem care nu este afectat de nicio forță externă (sau sunt compensate), conservat la timp:
Conservarea impulsului în acest caz decurge din a doua și a treia lege a lui Newton: scris a doua lege a lui Newton pentru fiecare dintre punctele materiale care alcătuiesc sistemul și însumând-o peste toate punctele materiale care alcătuiesc sistemul, în virtutea celei de-a treia legi a lui Newton. lege obținem egalitatea (*).
În mecanica relativistă, impulsul tridimensional al unui sistem de puncte materiale care nu interacționează este cantitatea
 ,
,
Unde m i- greutate i-al-lea punct material.
Pentru un sistem închis de puncte materiale care nu interacționează, această valoare este păstrată. Cu toate acestea, impulsul tridimensional nu este o mărime relativistic invariantă, deoarece depinde de cadrul de referință. O valoare mai semnificativă va fi un impuls cu patru dimensiuni, care pentru un punct material este definit ca

În practică, sunt adesea folosite următoarele relații între masa, impulsul și energia unei particule:
În principiu, pentru un sistem de puncte materiale care nu interacționează, se însumează cele 4 momente ale acestora. Cu toate acestea, pentru particulele care interacționează în mecanica relativistă, ar trebui să se ia în considerare momentele nu numai ale particulelor care alcătuiesc sistemul, ci și impulsul câmpului de interacțiune dintre ele. Prin urmare, o cantitate mult mai semnificativă în mecanica relativistă este tensorul energie-impuls, care satisface pe deplin legile de conservare.
Proprietăți puls
· Aditivitate. Această proprietate înseamnă că impulsul unui sistem mecanic format din puncte materiale este egal cu suma impulsurilor tuturor punctelor materiale incluse în sistem.
· Invarianță față de rotația cadrului de referință.
· Conservare. Momentul nu se modifică în timpul interacțiunilor care modifică doar caracteristicile mecanice ale sistemului. Această proprietate este invariabilă față de transformările galileene.Proprietățile de conservare a energiei cinetice, de conservare a impulsului și a doua lege a lui Newton sunt suficiente pentru a deriva formula matematică a impulsului.
Legea conservării impulsului (Legea conservării impulsului)- suma vectoriala a impulsurilor tuturor corpurilor sistemului este o valoare constanta, daca suma vectoriala a fortelor externe care actioneaza asupra sistemului este egala cu zero.
În mecanica clasică, legea conservării impulsului este de obicei derivată ca o consecință a legilor lui Newton. Din legile lui Newton, se poate arăta că atunci când se deplasează în spațiul gol, impulsul se păstrează în timp, iar în prezența interacțiunii, rata modificării sale este determinată de suma forțelor aplicate.
Ca oricare dintre legile fundamentale de conservare, legea conservării impulsului este asociată, conform teoremei lui Noether, cu una dintre simetriile fundamentale - omogenitatea spațiului.
Modificarea impulsului unui corp este egală cu impulsul rezultantei tuturor forțelor care acționează asupra corpului. Aceasta este o altă formulare a celei de-a doua legi a lui Newton.


