ប្រធានបទនៃ USE codifier:សន្ទុះនៃរាងកាយ សន្ទុះនៃប្រព័ន្ធសាកសព ច្បាប់នៃការអភិរក្សសន្ទុះ។
ជីពចររាងកាយគឺជាបរិមាណវ៉ិចទ័រស្មើនឹងផលិតផលនៃម៉ាសនៃរាងកាយនិងល្បឿនរបស់វា:
មិនមានឯកតាពិសេសសម្រាប់វាស់សន្ទុះទេ។ វិមាត្រសន្ទុះគឺគ្រាន់តែជាផលិតផលនៃវិមាត្រម៉ាស់ និងវិមាត្រល្បឿន៖
ហេតុអ្វីបានជាគំនិតនៃសន្ទុះគួរឱ្យចាប់អារម្មណ៍? វាប្រែថាវាអាចត្រូវបានប្រើដើម្បីផ្តល់ឱ្យច្បាប់ទី 2 របស់ញូវតុនមានភាពខុសប្លែកគ្នាបន្តិចបន្តួច ហើយក៏ជាទម្រង់ដែលមានប្រយោជន៍ខ្លាំងផងដែរ។
ច្បាប់ទី 2 របស់ញូវតុនក្នុងទម្រង់ស្រើបស្រាល
អនុញ្ញាតឱ្យជាលទ្ធផលនៃកម្លាំងដែលបានអនុវត្តទៅលើតួនៃម៉ាស់។ យើងចាប់ផ្តើមជាមួយនឹងសញ្ញាណធម្មតានៃច្បាប់ទីពីររបស់ញូតុន៖
ដោយមើលឃើញថាការបង្កើនល្បឿននៃរាងកាយគឺស្មើនឹងដេរីវេនៃវ៉ិចទ័រល្បឿន ច្បាប់ទីពីររបស់ញូតុនត្រូវបានសរសេរឡើងវិញដូចខាងក្រោម:
យើងណែនាំថេរនៅក្រោមសញ្ញានៃដេរីវេ៖
ដូចដែលអ្នកអាចមើលឃើញ ដេរីវេនៃសន្ទុះត្រូវបានទទួលនៅផ្នែកខាងឆ្វេង៖
. ( 1 )
ទំនាក់ទំនង (1) គឺជាទម្រង់ថ្មីនៃច្បាប់ទីពីររបស់ញូតុន។
ច្បាប់ទី 2 របស់ញូវតុនក្នុងទម្រង់ស្រើបស្រាល។ ដេរីវេនៃសន្ទុះនៃរាងកាយគឺជាលទ្ធផលនៃកម្លាំងដែលបានអនុវត្តទៅលើរាងកាយ។
យើងក៏អាចនិយាយបានថា កម្លាំងលទ្ធផលដែលធ្វើសកម្មភាពលើរាងកាយគឺស្មើនឹងអត្រានៃការផ្លាស់ប្តូរសន្ទុះនៃរាងកាយ។
ដេរីវេនៅក្នុងរូបមន្ត (1) អាចត្រូវបានជំនួសដោយសមាមាត្រនៃការកើនឡើងចុងក្រោយ៖
. ( 2 )
នៅក្នុងករណីនេះ មានកម្លាំងមធ្យមមួយដែលមានសកម្មភាពលើរាងកាយក្នុងអំឡុងពេលចន្លោះពេល។ តម្លៃកាន់តែតូច ទំនាក់ទំនងកាន់តែជិតទៅនឹងនិស្សន្ទវត្ថុ ហើយកម្លាំងជាមធ្យមកាន់តែខិតទៅជិតតម្លៃភ្លាមៗរបស់វានៅពេលជាក់លាក់មួយ។
នៅក្នុងភារកិច្ច, ជាក្បួន, ចន្លោះពេលគឺតូចណាស់។ ឧទាហរណ៍វាអាចជាពេលវេលានៃផលប៉ះពាល់នៃបាល់ជាមួយនឹងជញ្ជាំងហើយបន្ទាប់មក - កម្លាំងជាមធ្យមដែលធ្វើសកម្មភាពលើបាល់ពីចំហៀងនៃជញ្ជាំងក្នុងអំឡុងពេលផលប៉ះពាល់។
វ៉ិចទ័រនៅផ្នែកខាងឆ្វេងនៃទំនាក់ទំនង (2) ត្រូវបានគេហៅថា ការផ្លាស់ប្តូរសន្ទុះកំឡុងពេល។ ការផ្លាស់ប្តូរសន្ទុះគឺជាភាពខុសគ្នារវាងវ៉ិចទ័រសន្ទុះចុងក្រោយ និងដំបូង។ មានន័យថា ប្រសិនបើសន្ទុះនៃរូបកាយនៅគ្រាដំបូងខ្លះ គឺជាសន្ទុះនៃរាងកាយបន្ទាប់ពីមួយរយៈពេល នោះការផ្លាស់ប្តូរនៃសន្ទុះគឺខុសគ្នា៖
យើងសង្កត់ធ្ងន់ម្តងទៀតថាការផ្លាស់ប្តូរសន្ទុះគឺជាភាពខុសគ្នានៃវ៉ិចទ័រ (រូបភាពទី 1)៖
ជាឧទាហរណ៍ សូមឲ្យបាល់ហោះកាត់កែងទៅនឹងជញ្ជាំង (សន្ទុះមុនពេលមានផលប៉ះពាល់) ហើយលោតត្រឡប់មកវិញដោយមិនបាត់បង់ល្បឿន (សន្ទុះបន្ទាប់ពីផលប៉ះពាល់គឺ)។ ទោះបីជាការពិតដែលថាសន្ទុះម៉ូឌុលមិនបានផ្លាស់ប្តូរ () មានការផ្លាស់ប្តូរនៅក្នុងសន្ទុះ:
តាមធរណីមាត្រ ស្ថានភាពនេះត្រូវបានបង្ហាញក្នុងរូប។ ២៖
ម៉ូឌុលនៃការផ្លាស់ប្តូរនៅក្នុងសន្ទុះ ដូចដែលយើងឃើញគឺស្មើនឹងពីរដងនៃម៉ូឌុលនៃសន្ទុះដំបូងនៃបាល់៖ .
ចូរយើងសរសេររូបមន្ត (២) ឡើងវិញដូចខាងក្រោម៖
, ( 3 )
ឬសរសេរការផ្លាស់ប្តូរសន្ទុះដូចខាងលើ៖
តម្លៃត្រូវបានគេហៅថា កម្លាំងជំរុញ។មិនមានឯកតារង្វាស់ពិសេសសម្រាប់កម្លាំងរុញច្រាន; វិមាត្រនៃកម្លាំងរុញច្រាន គ្រាន់តែជាផលិតផលនៃវិមាត្រនៃកម្លាំង និងពេលវេលា៖
(ចំណាំថាវាក្លាយជាឯកតារង្វាស់ដែលអាចធ្វើទៅបានមួយផ្សេងទៀតសម្រាប់សន្ទុះរាងកាយ។ )
ទម្រង់ពាក្យសំដីនៃសមភាព (៣) មានដូចខាងក្រោម៖ ការផ្លាស់ប្តូរនៃសន្ទុះនៃរាងកាយគឺស្មើនឹងសន្ទុះនៃកម្លាំងដែលធ្វើសកម្មភាពលើរាងកាយក្នុងរយៈពេលជាក់លាក់មួយ។នេះជាការពិតណាស់ជាច្បាប់ទីពីររបស់ញូតុនជាថ្មីម្តងទៀតក្នុងទម្រង់ជាការរំជើបរំជួល។
ឧទាហរណ៍នៃការគណនាកម្លាំង
ជាឧទាហរណ៍នៃការអនុវត្តច្បាប់ទី 2 របស់ញូវតុនក្នុងទម្រង់ស្រើបស្រាល ចូរយើងពិចារណាអំពីបញ្ហាខាងក្រោម។
កិច្ចការ។
បាល់នៃម៉ាស់ r ហោះផ្ដេកក្នុងល្បឿន m/s បុកជញ្ជាំងបញ្ឈររលោង ហើយលោតចេញពីវាដោយមិនបាត់បង់ល្បឿន។ មុំនៃឧប្បត្តិហេតុនៃបាល់ (នោះគឺមុំរវាងទិសដៅនៃបាល់និងកាត់កែងទៅនឹងជញ្ជាំង) ។ ការបុកមានរយៈពេល s ។ ស្វែងរកកម្លាំងមធ្យម
ធ្វើសកម្មភាពលើបាល់នៅពេលប៉ះ។
ដំណោះស្រាយ។ជាដំបូង យើងនឹងបង្ហាញថា មុំនៃការឆ្លុះបញ្ចាំងគឺស្មើនឹងមុំនៃឧប្បត្តិហេតុ ពោលគឺបាល់នឹងលោតចេញពីជញ្ជាំងនៅមុំដូចគ្នា (រូបភាពទី 3)។
យោងតាម (3) យើងមាន: . វាធ្វើតាមថាសន្ទុះផ្លាស់ប្តូរវ៉ិចទ័រ សហការដឹកនាំជាមួយវ៉ិចទ័រ ពោលគឺតម្រង់កាត់កែងទៅនឹងជញ្ជាំងឆ្ពោះទៅរកការស្ទុះងើបឡើងវិញនៃបាល់ (រូបភាពទី 5)។
 |
| អង្ករ។ 5. ទៅភារកិច្ច |
វ៉ិចទ័រ និង
ស្មើគ្នាក្នុងម៉ូឌុល
(ដោយសារតែល្បឿននៃបាល់មិនបានផ្លាស់ប្តូរ) ។ ដូច្នេះ ត្រីកោណដែលបង្កើតឡើងដោយវ៉ិចទ័រ និង , គឺជាអ៊ីសូសែល។ នេះមានន័យថាមុំរវាងវ៉ិចទ័រ និងស្មើនឹង ពោលគឺមុំនៃការឆ្លុះបញ្ចាំងគឺពិតជាស្មើនឹងមុំនៃឧប្បត្តិហេតុ។
ឥឡូវនេះសូមកត់សម្គាល់បន្ថែមថាត្រីកោណ isosceles របស់យើងមានមុំមួយ (នេះគឺជាមុំនៃឧប្បត្តិហេតុ); ដូច្នេះត្រីកោណនេះគឺស្មើ។ ពីទីនេះ:
ហើយបន្ទាប់មកកម្លាំងមធ្យមដែលចង់បានធ្វើសកម្មភាពលើបាល់៖
ការជម្រុញនៃប្រព័ន្ធរាងកាយ
ចូរចាប់ផ្តើមជាមួយនឹងស្ថានភាពសាមញ្ញនៃប្រព័ន្ធរាងកាយពីរ។ ពោលគឺឲ្យមានកាយ ១ និងកាយ ២ មានសតិប្បដ្ឋាន ហើយរៀងខ្លួន។ Impulse នៃប្រព័ន្ធទិន្នន័យរាងកាយ គឺជាផលបូកវ៉ិចទ័រនៃកម្លាំងរុញច្រាននៃរាងកាយនីមួយៗ៖
វាប្រែថាសម្រាប់សន្ទុះនៃប្រព័ន្ធសាកសពមានរូបមន្តស្រដៀងទៅនឹងច្បាប់ទីពីររបស់ញូតុនក្នុងទម្រង់ (1) ។ ចូរយើងទាញយករូបមន្តនេះ។
វត្ថុផ្សេងទៀតទាំងអស់ដែលតួទី 1 និង 2 ស្ថិតក្រោមការពិចារណាមានអន្តរកម្ម យើងនឹងហៅទូរស័ព្ទទៅ រាងកាយខាងក្រៅ។កម្លាំងដែលរាងកាយខាងក្រៅធ្វើសកម្មភាពលើរាងកាយ 1 និង 2 ត្រូវបានគេហៅថា កម្លាំងខាងក្រៅ។អនុញ្ញាតឱ្យ - លទ្ធផលនៃកម្លាំងខាងក្រៅដែលធ្វើសកម្មភាពលើរាងកាយ 1. ស្រដៀងគ្នានេះដែរ - លទ្ធផលនៃកម្លាំងខាងក្រៅដែលធ្វើសកម្មភាពលើរាងកាយ 2 (រូបភាព 6) ។
លើសពីនេះទៀតសាកសពទី 1 និងទី 2 អាចទាក់ទងគ្នាទៅវិញទៅមក។ អនុញ្ញាតឱ្យរាងកាយ 2 ធ្វើសកម្មភាពលើរាងកាយ 1 ដោយកម្លាំង។ បន្ទាប់មករាងកាយ 1 ធ្វើសកម្មភាពលើរាងកាយ 2 ដោយកម្លាំង។ យោងតាមច្បាប់ទីបីរបស់ញូវតុន កម្លាំង និងមានតម្លៃស្មើគ្នា និងផ្ទុយពីទិសដៅ៖ . បង្ខំនិង កម្លាំងខាងក្នុង,ដំណើរការនៅក្នុងប្រព័ន្ធ។
ចូរយើងសរសេរសម្រាប់តួនីមួយៗ 1 និង 2 ច្បាប់ទីពីររបស់ញូតុនក្នុងទម្រង់ (1):
, ( 4 )
. ( 5 )
ចូរបន្ថែមភាពស្មើគ្នា (4) និង (5)៖
នៅផ្នែកខាងឆ្វេងនៃសមភាពលទ្ធផលគឺជាផលបូកនៃដេរីវេដែលស្មើនឹងដេរីវេនៃផលបូកនៃវ៉ិចទ័រ និង . នៅផ្នែកខាងស្តាំ យើងមានដោយច្បាប់ទីបីរបស់ញូតុន៖
ប៉ុន្តែ - នេះគឺជាកម្លាំងរុញច្រាននៃប្រព័ន្ធសាកសព 1 និង 2 ។ យើងក៏បញ្ជាក់ផងដែរ - នេះគឺជាលទ្ធផលនៃកម្លាំងខាងក្រៅដែលធ្វើសកម្មភាពលើប្រព័ន្ធ។ យើងទទួលបាន:
. ( 6 )
ដូច្នេះ អត្រានៃការផ្លាស់ប្តូរនៃសន្ទុះនៃប្រព័ន្ធសាកសពគឺជាលទ្ធផលនៃកម្លាំងខាងក្រៅដែលបានអនុវត្តទៅលើប្រព័ន្ធ។សមភាព (៦) ដែលដើរតួជាច្បាប់ទីពីររបស់ញូតុនសម្រាប់ប្រព័ន្ធរូបកាយ គឺជាអ្វីដែលយើងចង់ទទួលបាន។
រូបមន្ត (6) ត្រូវបានគេយកមកសម្រាប់ករណីនៃសាកសពពីរ។ ឥឡូវនេះ ចូរយើងធ្វើការវិភាគទូទៅអំពីហេតុផលរបស់យើងចំពោះករណីនៃចំនួនសាកសពនៅក្នុងប្រព័ន្ធ។
កម្លាំងរុញច្រាននៃប្រព័ន្ធរាងកាយសាកសពត្រូវបានគេហៅថាផលបូកវ៉ិចទ័រនៃកម្លាំងរុញច្រាននៃសាកសពទាំងអស់ដែលរួមបញ្ចូលនៅក្នុងប្រព័ន្ធ។ ប្រសិនបើប្រព័ន្ធមានតួ នោះសន្ទុះនៃប្រព័ន្ធនេះគឺស្មើនឹង៖
បន្ទាប់មកអ្វីគ្រប់យ៉ាងត្រូវបានធ្វើតាមរបៀបដូចគ្នាដូចខាងលើ (មានតែបច្ចេកទេសវាមើលទៅស្មុគស្មាញបន្តិច) ។ ប្រសិនបើសម្រាប់តួនីមួយៗ យើងសរសេរសមភាពស្រដៀងនឹង ( 4 ) និង ( 5 ) ហើយបន្ទាប់មកបន្ថែមភាពស្មើគ្នាទាំងអស់នេះ បន្ទាប់មកនៅផ្នែកខាងឆ្វេង យើងម្តងទៀតទទួលបានផលបូកនៃសន្ទុះនៃប្រព័ន្ធ ហើយនៅផ្នែកខាងស្តាំមានតែផលបូកនៃ កម្លាំងខាងក្រៅនៅតែមាន (កម្លាំងខាងក្នុងបន្ថែមជាគូនឹងផ្តល់សូន្យដោយសារច្បាប់ទីបីរបស់ញូតុន)។ ដូច្នេះ សមភាព (6) នឹងនៅតែមានសុពលភាពក្នុងករណីទូទៅ។
ច្បាប់នៃការអភិរក្សសន្ទុះ
ប្រព័ន្ធរាងកាយត្រូវបានគេហៅថា បិទប្រសិនបើសកម្មភាពនៃសរីរាង្គខាងក្រៅលើរាងកាយនៃប្រព័ន្ធដែលបានផ្តល់ឱ្យគឺមានការធ្វេសប្រហែស ឬផ្តល់សំណងដល់គ្នាទៅវិញទៅមក។ ដូច្នេះនៅក្នុងករណីនៃប្រព័ន្ធបិទជិតនៃសាកសពមានតែអន្តរកម្មនៃសាកសពទាំងនេះជាមួយគ្នាទៅវិញទៅមកគឺចាំបាច់ប៉ុន្តែមិនមែនជាមួយសាកសពផ្សេងទៀតទេ។
លទ្ធផលនៃកម្លាំងខាងក្រៅដែលបានអនុវត្តចំពោះប្រព័ន្ធបិទជិតគឺស្មើនឹងសូន្យ៖ . ក្នុងករណីនេះពី (6) យើងទទួលបាន:
ប៉ុន្តែប្រសិនបើដេរីវេនៃវ៉ិចទ័របាត់ (អត្រានៃការផ្លាស់ប្តូរវ៉ិចទ័រគឺសូន្យ) នោះវ៉ិចទ័រខ្លួនឯងមិនផ្លាស់ប្តូរតាមពេលវេលាទេ៖
ច្បាប់នៃការអភិរក្សសន្ទុះ។ សន្ទុះនៃប្រព័ន្ធបិទជិតនៃសាកសពនៅតែថេរតាមពេលវេលាសម្រាប់អន្តរកម្មនៃសាកសពនៅក្នុងប្រព័ន្ធនេះ។
បញ្ហាសាមញ្ញបំផុតនៅលើច្បាប់នៃការអភិរក្សនៃសន្ទុះត្រូវបានដោះស្រាយតាមគ្រោងការណ៍ស្តង់ដារដែលឥឡូវនេះយើងនឹងបង្ហាញ។
កិច្ចការ។ តួនៃម៉ាស់ r ផ្លាស់ទីក្នុងល្បឿន m/s លើផ្ទៃផ្ដេករលោង។ តួនៃម៉ាស់ r កំពុងធ្វើដំណើរឆ្ពោះទៅរកវាក្នុងល្បឿន m/s ។ ផលប៉ះពាល់មិនស្មើគ្នាកើតឡើង (សាកសពនៅជាប់គ្នា)។ ស្វែងរកល្បឿននៃសាកសពបន្ទាប់ពីផលប៉ះពាល់។
ដំណោះស្រាយ។ស្ថានភាពត្រូវបានបង្ហាញនៅក្នុងរូបភព។ ៧. ចូរដឹកនាំអ័ក្សក្នុងទិសដៅនៃចលនានៃរាងកាយទីមួយ។
 |
| អង្ករ។ 7. ទៅភារកិច្ច |
ដោយសារតែផ្ទៃរលោងមិនមានការកកិតទេ។ ដោយសារផ្ទៃគឺផ្ដេក ហើយចលនាកើតឡើងតាមបណ្តោយវា កម្លាំងទំនាញ និងប្រតិកម្មនៃការគាំទ្រមានតុល្យភាពរវាងគ្នាទៅវិញទៅមក៖
ដូច្នេះផលបូកវ៉ិចទ័រនៃកម្លាំងដែលបានអនុវត្តទៅប្រព័ន្ធនៃសាកសពទាំងនេះគឺស្មើនឹងសូន្យ។ នេះមានន័យថាប្រព័ន្ធសាកសពត្រូវបានបិទ។ ដូច្នេះ វាបំពេញច្បាប់នៃការអភិរក្សសន្ទុះ៖
. ( 7 )
កម្លាំងរុញច្រាននៃប្រព័ន្ធមុនពេលប៉ះពាល់ គឺជាផលបូកនៃកម្លាំងរុញច្រាននៃសាកសព៖
បន្ទាប់ពីមានការប៉ះពាល់មិនរាងចាល តួនៃម៉ាស់មួយត្រូវបានទទួលដែលធ្វើចលនាក្នុងល្បឿនដែលចង់បាន៖
ពីច្បាប់អភិរក្សសន្ទុះ (៧) យើងមាន៖
ពីទីនេះយើងរកឃើញល្បឿននៃរាងកាយដែលបានបង្កើតឡើងបន្ទាប់ពីផលប៉ះពាល់:
ចូរបន្តទៅការព្យាករណ៍នៅលើអ័ក្ស៖
តាមលក្ខខណ្ឌ យើងមាន៖ m/s, m/s, ដូច្នេះ
សញ្ញាដកបង្ហាញថារាងកាយស្អិតផ្លាស់ទីក្នុងទិសដៅផ្ទុយទៅនឹងអ័ក្ស។ ល្បឿនគោលដៅ៖ m/s ។
ច្បាប់អភិរក្សការព្យាករណ៍សន្ទុះ
ស្ថានភាពខាងក្រោមជារឿយៗកើតឡើងក្នុងកិច្ចការ។ ប្រព័ន្ធសាកសពមិនត្រូវបានបិទទេ (ផលបូកវ៉ិចទ័រនៃកម្លាំងខាងក្រៅដែលដើរតួលើប្រព័ន្ធគឺមិនស្មើនឹងសូន្យ) ប៉ុន្តែមានអ័ក្សបែបនេះ។ ផលបូកនៃការព្យាករនៃកម្លាំងខាងក្រៅនៅលើអ័ក្សគឺសូន្យនៅពេលណាក៏បាន។ បន្ទាប់មកយើងអាចនិយាយបានថាតាមអ័ក្សនេះ ប្រព័ន្ធនៃរាងកាយរបស់យើងមានឥរិយាបទបិទជិត ហើយការព្យាករនៃសន្ទុះនៃប្រព័ន្ធទៅលើអ័ក្សត្រូវបានរក្សាទុក។
សូមបង្ហាញនេះកាន់តែតឹងរ៉ឹង។ សមភាពគម្រោង (៦) លើអ័ក្ស៖
ប្រសិនបើការព្យាករណ៍នៃលទ្ធផលនៃកម្លាំងខាងក្រៅរលាយបាត់
ដូច្នេះការព្យាករណ៍គឺថេរ៖
ច្បាប់នៃការអភិរក្សនៃការព្យាករសន្ទុះ។ ប្រសិនបើការព្យាករលើអ័ក្សនៃផលបូកនៃកម្លាំងខាងក្រៅដែលធ្វើសកម្មភាពលើប្រព័ន្ធគឺស្មើនឹងសូន្យ នោះការព្យាករណ៍នៃសន្ទុះនៃប្រព័ន្ធមិនផ្លាស់ប្តូរទៅតាមពេលវេលាទេ។
សូមក្រឡេកមើលឧទាហរណ៍នៃបញ្ហាជាក់លាក់មួយ របៀបដែលច្បាប់នៃការអភិរក្សនៃការព្យាករណ៍សន្ទុះដំណើរការ។
កិច្ចការ។ ក្មេងប្រុសធំម្នាក់ ជិះស្គីលើទឹកកករលោង បោះដុំថ្មដ៏ធំក្នុងល្បឿនមួយនៅមុំមួយទៅជើងមេឃ។ ស្វែងរកល្បឿនដែលក្មេងប្រុសវិលត្រឡប់មកវិញបន្ទាប់ពីការបោះ។
ដំណោះស្រាយ។ស្ថានភាពត្រូវបានបង្ហាញជាគ្រោងការណ៍នៅក្នុងរូបភព។ ៨. ក្មេងប្រុសត្រូវបានបង្ហាញជាចតុកោណ។
 |
| អង្ករ។ 8. ទៅភារកិច្ច |
សន្ទុះនៃប្រព័ន្ធ "ក្មេងប្រុស + ថ្ម" មិនត្រូវបានអភិរក្សទេ។ នេះអាចមើលឃើញយ៉ាងហោចណាស់ពីការពិតដែលថាបន្ទាប់ពីការបោះ សមាសធាតុបញ្ឈរនៃសន្ទុះនៃប្រព័ន្ធលេចឡើង (ពោលគឺធាតុផ្សំបញ្ឈរនៃសន្ទុះថ្ម) ដែលមិនមាននៅទីនោះមុនពេលបោះ។
ដូច្នេះប្រព័ន្ធដែលក្មេងប្រុសនិងទម្រង់ថ្មមិនត្រូវបានបិទទេ។ ហេតុអ្វី? ការពិតគឺថាផលបូកវ៉ិចទ័រនៃកម្លាំងខាងក្រៅមិនស្មើនឹងសូន្យក្នុងអំឡុងពេលបោះ។ តម្លៃគឺធំជាងផលបូក ហើយដោយសារតែការលើសនេះ វាគឺជាសមាសធាតុបញ្ឈរនៃសន្ទុះនៃប្រព័ន្ធដែលលេចឡើងយ៉ាងជាក់លាក់។
ទោះជាយ៉ាងណាក៏ដោយ កម្លាំងខាងក្រៅធ្វើសកម្មភាពតែបញ្ឈរ (គ្មានការកកិត)។ ដូច្នេះការព្យាករណ៍នៃសន្ទុះនៅលើអ័ក្សផ្ដេកត្រូវបានរក្សាទុក។ មុនពេលបោះ ការព្យាករនេះគឺស្មើនឹងសូន្យ។ ដឹកនាំអ័ក្សក្នុងទិសដៅនៃការបោះ (ដូច្នេះក្មេងប្រុសបានទៅក្នុងទិសដៅនៃពាក់កណ្តាលអ័ក្សអវិជ្ជមាន) យើងទទួលបាន។
សន្ទុះរាងកាយ
សន្ទុះនៃរាងកាយគឺជាបរិមាណស្មើនឹងផលិតផលនៃម៉ាសនៃរាងកាយ និងល្បឿនរបស់វា។
វាគួរតែត្រូវបានចងចាំក្នុងចិត្តថាយើងកំពុងនិយាយអំពីរាងកាយដែលអាចត្រូវបានតំណាងជាចំណុចសម្ភារៈមួយ។ សន្ទុះនៃរាងកាយ ($p$) ត្រូវបានគេហៅថាសន្ទុះ។ គំនិតនៃសន្ទុះត្រូវបានបញ្ចូលទៅក្នុងរូបវិទ្យាដោយ René Descartes (1596-1650) ។ ពាក្យ "ជំរុញ" បានបង្ហាញខ្លួននៅពេលក្រោយ (ការជំរុញជាភាសាឡាតាំងមានន័យថា "រុញ") ។ សន្ទុះគឺជាបរិមាណវ៉ិចទ័រ (ដូចជាល្បឿន) ហើយត្រូវបានបង្ហាញដោយរូបមន្ត៖
$p↖(→)=mυ↖(→)$
ទិសដៅនៃវ៉ិចទ័រសន្ទុះតែងតែស្របគ្នានឹងទិសដៅនៃល្បឿន។
ឯកតានៃសន្ទុះនៅក្នុង SI គឺជាសន្ទុះនៃរាងកាយដែលមានម៉ាស់ $1$ kg ផ្លាស់ទីក្នុងល្បឿន $1$ m/s ដូច្នេះឯកតានៃសន្ទុះគឺ $1$ kg $·$ m/s ។
ប្រសិនបើកម្លាំងថេរធ្វើសកម្មភាពលើរាងកាយ (ចំណុចសម្ភារៈ) ក្នុងចន្លោះពេល $∆t$ នោះការបង្កើនល្បឿនក៏នឹងថេរដែរ៖
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
ដែល $(υ_1)↖(→)$ និង $(υ_2)↖(→)$ គឺជាល្បឿនដំបូង និងចុងក្រោយនៃរាងកាយ។ ការជំនួសតម្លៃនេះទៅក្នុងកន្សោមនៃច្បាប់ទីពីររបស់ញូតុន យើងទទួលបាន៖
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
ការបើកតង្កៀប និងការប្រើប្រាស់កន្សោមសម្រាប់សន្ទុះនៃរាងកាយ យើងមាន៖
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
នៅទីនេះ $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ គឺជាការផ្លាស់ប្តូរសន្ទុះតាមពេលវេលា $∆t$។ បន្ទាប់មកសមីការមុនក្លាយជា៖
$∆p↖(→)=F↖(→)∆t$
កន្សោម $∆p↖(→)=F↖(→)∆t$ គឺជាតំណាងគណិតវិទ្យានៃច្បាប់ទីពីររបស់ញូតុន។
ផលិតផលនៃកម្លាំងនិងរយៈពេលរបស់វាត្រូវបានគេហៅថា សន្ទុះនៃកម្លាំង. នោះហើយជាមូលហេតុដែល ការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃចំណុចមួយគឺស្មើនឹងការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃកម្លាំងដែលធ្វើសកម្មភាពលើវា។
កន្សោម $∆p↖(→)=F↖(→)∆t$ ត្រូវបានគេហៅថា សមីការចលនារាងកាយ. វាគួរតែត្រូវបានកត់សម្គាល់ថាសកម្មភាពដូចគ្នា - ការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃចំណុចមួយ - អាចទទួលបានដោយកម្លាំងតូចមួយក្នុងរយៈពេលយូរនិងដោយកម្លាំងធំក្នុងរយៈពេលតូចមួយនៃពេលវេលា។
Impulse នៃប្រព័ន្ធ tel. ច្បាប់នៃការផ្លាស់ប្តូរសន្ទុះ
កម្លាំងរុញច្រាន (សន្ទុះ) នៃប្រព័ន្ធមេកានិក គឺជាវ៉ិចទ័រស្មើនឹងផលបូកនៃកម្លាំងរុញច្រាននៃចំណុចសម្ភារៈទាំងអស់នៃប្រព័ន្ធនេះ៖
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
ច្បាប់នៃការផ្លាស់ប្តូរ និងការអភិរក្សនៃសន្ទុះគឺជាផលវិបាកនៃច្បាប់ទីពីរ និងទីបីរបស់ញូតុន។
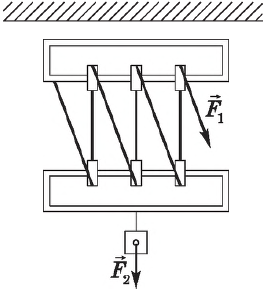
ពិចារណាប្រព័ន្ធមួយដែលមានតួពីរ។ កម្លាំង ($F_(12)$ និង $F_(21)$ នៅក្នុងរូប ដែលរាងកាយនៃប្រព័ន្ធមានអន្តរកម្មជាមួយគ្នា ត្រូវបានគេហៅថាផ្ទៃក្នុង។
អនុញ្ញាតឱ្យបន្ថែមលើកម្លាំងខាងក្នុង កម្លាំងខាងក្រៅ $(F_1)↖(→)$ និង $(F_2)↖(→)$ ធ្វើសកម្មភាពលើប្រព័ន្ធ។ សម្រាប់តួនីមួយៗ សមីការ $∆p↖(→)=F↖(→)∆t$ អាចត្រូវបានសរសេរ។ ការបន្ថែមផ្នែកខាងឆ្វេង និងខាងស្តាំនៃសមីការទាំងនេះ យើងទទួលបាន៖
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
យោងតាមច្បាប់ទីបីរបស់ញូតុន $(F_(12))↖(→)=-(F_(21))↖(→)$ ។
អាស្រ័យហេតុនេះ
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
នៅផ្នែកខាងឆ្វេងគឺជាផលបូកធរណីមាត្រនៃការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃតួទាំងអស់នៃប្រព័ន្ធ ស្មើនឹងការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃប្រព័ន្ធខ្លួនវា - $(∆p_(syst))↖(→)$ ។ នៅក្នុងចិត្ត ភាពស្មើគ្នា $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ អាចសរសេរបាន៖
$(∆p_(sys))↖(→)=F↖(→)∆t$
ដែល $F↖(→)$ គឺជាផលបូកនៃកម្លាំងខាងក្រៅទាំងអស់ដែលធ្វើសកម្មភាពលើរាងកាយ។ លទ្ធផលដែលទទួលបានមានន័យថាមានតែកម្លាំងខាងក្រៅប៉ុណ្ណោះដែលអាចផ្លាស់ប្តូរសន្ទុះនៃប្រព័ន្ធបាន ហើយការផ្លាស់ប្តូរសន្ទុះនៃប្រព័ន្ធត្រូវបានដឹកនាំតាមរបៀបដូចគ្នាទៅនឹងកម្លាំងខាងក្រៅសរុប។ នេះគឺជាខ្លឹមសារនៃច្បាប់នៃការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃប្រព័ន្ធមេកានិចមួយ។
កម្លាំងខាងក្នុងមិនអាចផ្លាស់ប្តូរសន្ទុះសរុបនៃប្រព័ន្ធបានទេ។ ពួកគេគ្រាន់តែផ្លាស់ប្តូរការជំរុញនៃសាកសពបុគ្គលនៃប្រព័ន្ធ។
ច្បាប់នៃការអភិរក្សសន្ទុះ
ពីសមីការ $(∆p_(syst))↖(→)=F↖(→)∆t$ ច្បាប់អភិរក្សសន្ទុះដូចខាងក្រោម។ ប្រសិនបើគ្មានកម្លាំងខាងក្រៅធ្វើសកម្មភាពលើប្រព័ន្ធទេ នោះផ្នែកខាងស្តាំនៃសមីការ $(∆p_(sys))↖(→)=F↖(→)∆t$ រលាយបាត់ ដែលមានន័យថាសន្ទុះសរុបនៃប្រព័ន្ធនៅតែមិនផ្លាស់ប្តូរ។ :
$(∆p_(sys))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
ប្រព័ន្ធដែលមិនមានកម្លាំងខាងក្រៅធ្វើសកម្មភាព ឬលទ្ធផលនៃកម្លាំងខាងក្រៅស្មើនឹងសូន្យត្រូវបានគេហៅថា បិទ។
ច្បាប់នៃការអភិរក្សសន្ទុះចែងថា:
សន្ទុះសរុបនៃប្រព័ន្ធបិទជិតនៃសាកសពនៅតែថេរសម្រាប់អន្តរកម្មនៃសាកសពនៃប្រព័ន្ធជាមួយគ្នាទៅវិញទៅមក។
លទ្ធផលដែលទទួលបានគឺត្រឹមត្រូវសម្រាប់ប្រព័ន្ធដែលមានចំនួនសាកសពតាមអំពើចិត្ត។ ប្រសិនបើផលបូកនៃកម្លាំងខាងក្រៅមិនស្មើនឹងសូន្យ ប៉ុន្តែផលបូកនៃការព្យាកររបស់ពួកគេលើទិសដៅខ្លះគឺស្មើនឹងសូន្យ នោះការព្យាករណ៍នៃសន្ទុះនៃប្រព័ន្ធលើទិសដៅនេះមិនផ្លាស់ប្តូរទេ។ ដូច្នេះ ជាឧទាហរណ៍ ប្រព័ន្ធនៃសាកសពនៅលើផ្ទៃផែនដីមិនអាចត្រូវបានគេចាត់ទុកថាបិទនោះទេ ដោយសារតែកម្លាំងទំនាញដែលធ្វើសកម្មភាពលើសាកសពទាំងអស់ ទោះជាយ៉ាងណាក៏ដោយ ផលបូកនៃការព្យាករណ៍នៃកម្លាំងរុញច្រានលើទិសផ្ដេកអាចនៅតែមិនផ្លាស់ប្តូរ (ក្នុងករណីដែលមិនមាន នៃការកកិត) ចាប់តាំងពីក្នុងទិសដៅនេះ កម្លាំងទំនាញមិនមានសុពលភាព។
ការរុញច្រានយន្តហោះ
ពិចារណាឧទាហរណ៍ដែលបញ្ជាក់ពីសុពលភាពនៃច្បាប់នៃការអភិរក្សសន្ទុះ។
ចូរយកប៉េងប៉ោងកៅស៊ូរបស់កុមារមកបំប៉ោងវាទៅ។ យើងនឹងឃើញថា នៅពេលដែលខ្យល់ចាប់ផ្តើមចេញពីវាក្នុងទិសដៅមួយ នោះប៉េងប៉ោងខ្លួនឯងនឹងហោះហើរក្នុងទិសដៅផ្សេង។ ចលនារបស់បាល់គឺជាឧទាហរណ៍នៃការជំរុញដោយយន្តហោះ។ វាត្រូវបានពន្យល់ដោយច្បាប់នៃការអភិរក្សនៃសន្ទុះ: សន្ទុះសរុបនៃប្រព័ន្ធ "បាល់បូកខ្យល់នៅក្នុងវា" មុនពេលលំហូរចេញនៃខ្យល់គឺសូន្យ; វាត្រូវតែនៅតែស្មើសូន្យក្នុងអំឡុងពេលចលនា; ដូច្នេះ បាល់ផ្លាស់ទីក្នុងទិសដៅផ្ទុយទៅនឹងទិសដៅនៃលំហូរចេញនៃយន្តហោះ ហើយជាមួយនឹងល្បឿនដែលសន្ទុះរបស់វាស្មើនឹងតម្លៃដាច់ខាតទៅនឹងសន្ទុះនៃយន្តហោះប្រតិកម្ម។
ការជំរុញយន្តហោះហៅថាចលនានៃរាងកាយដែលកើតឡើងនៅពេលដែលផ្នែកមួយរបស់វាបំបែកចេញពីវាក្នុងល្បឿនណាមួយ។ ដោយសារតែច្បាប់នៃការអភិរក្សនៃសន្ទុះទិសដៅនៃចលនានៃរាងកាយគឺផ្ទុយទៅនឹងទិសដៅនៃចលនានៃផ្នែកដែលបំបែក។
ការហោះហើររ៉ុក្កែតគឺផ្អែកលើគោលការណ៍នៃការជំរុញយន្តហោះ។ រ៉ុក្កែតអវកាសទំនើប គឺជាយន្តហោះដែលស្មុគស្មាញបំផុត។ ម៉ាស់របស់គ្រាប់រ៉ុក្កែត គឺជាផលបូកនៃម៉ាសនៃអង្គធាតុរាវដែលធ្វើការ (ឧ. ឧស្ម័នក្តៅ ដែលកើតចេញពីការចំហេះនៃឥន្ធនៈ និងបានច្រានចេញក្នុងទម្រង់ជាស្ទ្រីមយន្តហោះ) និងចុងក្រោយ ឬដូចដែលពួកគេនិយាយថា ម៉ាស់ "ស្ងួត"។ នៃគ្រាប់រ៉ុក្កែត ដែលនៅសេសសល់បន្ទាប់ពីការបញ្ចោញសារធាតុរាវការងារចេញពីគ្រាប់រ៉ុក្កែត។
នៅពេលដែលយន្តហោះប្រតិកម្មឧស្ម័នត្រូវបានច្រានចេញពីរ៉ុក្កែតក្នុងល្បឿនលឿន គ្រាប់រ៉ុក្កែតខ្លួនវាប្រញាប់ប្រញាល់ក្នុងទិសដៅផ្ទុយ។ យោងតាមច្បាប់អភិរក្សសន្ទុះ សន្ទុះ $m_(p)υ_p$ ដែលទទួលបានដោយរ៉ុក្កែតត្រូវតែស្មើនឹងសន្ទុះ $m_(ហ្គាស) υ_(ឧស្ម័ន)$ នៃឧស្ម័នដែលបានបញ្ចេញ៖
$m_(p)υ_p=m_(ឧស្ម័ន) υ_(ឧស្ម័ន)$
វាធ្វើតាមល្បឿននៃគ្រាប់រ៉ុក្កែត
$υ_p=((m_(ឧស្ម័ន))/(m_p)) υ_(ឧស្ម័ន)$
វាអាចត្រូវបានគេមើលឃើញពីរូបមន្តនេះថា ល្បឿនរបស់រ៉ុក្កែតកាន់តែធំ ល្បឿននៃឧស្ម័នដែលបញ្ចេញចេញកាន់តែធំ និងសមាមាត្រនៃម៉ាសនៃអង្គធាតុរាវធ្វើការ (ពោលគឺម៉ាស់ឥន្ធនៈ) ដល់ចុងក្រោយ ("ស្ងួត")។ ម៉ាស់គ្រាប់រ៉ុក្កែត។
រូបមន្ត $υ_p=((m_(ឧស្ម័ន))/(m_p))·υ_(ឧស្ម័ន)$ គឺប្រហាក់ប្រហែល។ វាមិនគិតថានៅពេលឥន្ធនៈឆេះនោះ ម៉ាស់របស់គ្រាប់រ៉ុក្កែតហោះកាន់តែតូចទៅៗ។ រូបមន្តពិតប្រាកដសម្រាប់ល្បឿនរ៉ុក្កែតមួយត្រូវបានទទួលនៅឆ្នាំ 1897 ដោយ K. E. Tsiolkovsky ហើយដាក់ឈ្មោះរបស់គាត់។
បង្ខំការងារ
ពាក្យ "ការងារ" ត្រូវបានបញ្ចូលទៅក្នុងរូបវិទ្យានៅឆ្នាំ 1826 ដោយអ្នកវិទ្យាសាស្ត្របារាំង J. Poncelet ។ ប្រសិនបើនៅក្នុងជីវិតប្រចាំថ្ងៃ មានតែកម្លាំងពលកម្មរបស់មនុស្សទេដែលត្រូវបានគេហៅថាការងារ នោះនៅក្នុងរូបវិទ្យា និងជាពិសេសនៅក្នុងមេកានិច វាត្រូវបានទទួលយកជាទូទៅថាការងារត្រូវបានធ្វើឡើងដោយកម្លាំង។ បរិមាណការងារជាធម្មតាត្រូវបានបញ្ជាក់ដោយអក្សរ $A$ ។
បង្ខំការងារ- នេះគឺជារង្វាស់នៃសកម្មភាពនៃកម្លាំង អាស្រ័យលើម៉ូឌុល និងទិសដៅរបស់វា ក៏ដូចជាលើការផ្លាស់ទីលំនៅចំណុចនៃការអនុវត្តកម្លាំង។ សម្រាប់កម្លាំងថេរ និងចលនា rectilinear ការងារត្រូវបានកំណត់ដោយសមភាព៖
$A=F|∆r↖(→)|cosα$
ដែល $F$ គឺជាកម្លាំងដែលធ្វើសកម្មភាពលើរាងកាយ $∆r↖(→)$ គឺជាការផ្លាស់ទីលំនៅ $α$ គឺជាមុំរវាងកម្លាំង និងការផ្លាស់ទីលំនៅ។

ការងាររបស់កម្លាំងគឺស្មើនឹងផលិតផលនៃម៉ូឌុលនៃកម្លាំង និងការផ្លាស់ទីលំនៅ និងកូស៊ីនុសនៃមុំរវាងពួកវា ពោលគឺផលិតផលមាត្រដ្ឋាននៃវ៉ិចទ័រ $F↖(→)$ និង $∆r↖(→)$ ។
ការងារគឺជាបរិមាណមាត្រដ្ឋាន។ ប្រសិនបើ $α 0$ ហើយប្រសិនបើ $90°
នៅពេលដែលកម្លាំងជាច្រើនធ្វើសកម្មភាពលើរាងកាយមួយ ការងារសរុប (ផលបូកនៃការងាររបស់កម្លាំងទាំងអស់) គឺស្មើនឹងការងារនៃកម្លាំងលទ្ធផល។
ឯកតា SI នៃការងារគឺ ជូល។($1$J)។ $1$ J គឺជាការងារដែលធ្វើដោយកម្លាំង $1$ N នៅលើផ្លូវ $1$m ក្នុងទិសដៅនៃកម្លាំងនេះ។ អង្គភាពនេះត្រូវបានដាក់ឈ្មោះតាមអ្នកវិទ្យាសាស្ត្រអង់គ្លេស J. Joule (1818-1889): $1$ J = $1$ N $·$ m. Kilojoules និង millijoules ត្រូវបានគេប្រើជាញឹកញាប់ផងដែរ: $1$ kJ $= 1,000$ J, $1$ mJ $ = 0.001$ J.
ការងារទំនាញផែនដី
ចូរយើងពិចារណាលើដងខ្លួនរអិលតាមយន្តហោះទំនោរដែលមានមុំទំនោរ $α$ និងកម្ពស់ $H$ ។

យើងបង្ហាញ $∆x$ នៅក្នុងលក្ខខណ្ឌនៃ $H$ និង $α$:
$∆x=(H)/(sinα)$
ដោយពិចារណាថាទំនាញ $F_т=mg$ បង្កើតមុំមួយ ($90° - α$) ជាមួយនឹងទិសដៅនៃចលនា ដោយប្រើរូបមន្ត $∆x=(H)/(sin)α$ យើងទទួលបានកន្សោមសម្រាប់ការងារទំនាញ $A_g$៖
$A_g=mg cos(90°-α)(H)/(sinα)=mgH$
ពីរូបមន្តនេះគេអាចមើលឃើញថាការងារទំនាញអាស្រ័យលើកម្ពស់ ហើយមិនអាស្រ័យលើមុំទំនោរនៃយន្តហោះនោះទេ។
ពីនេះវាដូចខាងក្រោម:
- ការងារទំនាញមិនអាស្រ័យលើរូបរាងនៃគន្លងដែលរាងកាយផ្លាស់ទីនោះទេប៉ុន្តែបានតែនៅលើទីតាំងដំបូងនិងចុងក្រោយនៃរាងកាយ;
- នៅពេលដែលរាងកាយផ្លាស់ទីតាមគន្លងបិទជិត ការងារទំនាញគឺសូន្យ ពោលគឺទំនាញគឺជាកម្លាំងអភិរក្ស (កម្លាំងអភិរក្សគឺជាកម្លាំងដែលមានទ្រព្យសម្បត្តិនេះ)។
ការងារនៃកម្លាំងប្រតិកម្ម, គឺសូន្យព្រោះកម្លាំងប្រតិកម្ម ($N$) ត្រូវបានដឹកនាំកាត់កែងទៅនឹងការផ្លាស់ទីលំនៅ $∆x$។
ការងាររបស់កម្លាំងកកិត
កម្លាំងកកិតត្រូវបានតម្រង់ផ្ទុយទៅនឹងការផ្លាស់ទីលំនៅ $∆x$ ហើយធ្វើមុំ $180°$ ជាមួយវា ដូច្នេះការងាររបស់កម្លាំងកកិតគឺអវិជ្ជមាន៖
$A_(tr)=F_(tr)∆x cos180°=-F_(tr) ∆x$
ចាប់តាំងពី $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα), $ បន្ទាប់មក
$A_(tr)=μmgHctgα$
ការងាររបស់កម្លាំងបត់បែន
អនុញ្ញាតឱ្យកម្លាំងខាងក្រៅ $F↖(→)$ ធ្វើសកម្មភាពលើនិទាឃរដូវដែលមិនលាតសន្ធឹង $l_0$ ដោយលាតសន្ធឹងដោយ $∆l_0=x_0$ ។ នៅក្នុងទីតាំង $x=x_0F_(control)=kx_0$ ។ បន្ទាប់ពីការបញ្ចប់នៃកម្លាំង $F↖(→)$ នៅចំណុច $x_0$ និទាឃរដូវត្រូវបានបង្ហាប់ក្រោមសកម្មភាពរបស់កម្លាំង $F_(control)$ ។

អនុញ្ញាតឱ្យយើងកំណត់ការងាររបស់កម្លាំងយឺតនៅពេលដែលកូអរដោនេនៃចុងខាងស្តាំនៃនិទាឃរដូវផ្លាស់ប្តូរពី $х_0$ ទៅ $х$ ។ ចាប់តាំងពីកម្លាំងយឺតនៅក្នុងតំបន់នេះផ្លាស់ប្តូរលីនេអ៊ែរ នៅក្នុងច្បាប់របស់ Hooke តម្លៃមធ្យមរបស់វានៅក្នុងតំបន់នេះអាចត្រូវបានប្រើ៖
$F_(ex.av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
បន្ទាប់មកការងារ (ដោយគិតគូរពីការពិតដែលថាទិសដៅ $(F_(exp.av.))↖(→)$ និង $(∆x)↖(→)$ coincide) គឺស្មើនឹង៖
$A_(exerc)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
វាអាចត្រូវបានបង្ហាញថាទម្រង់នៃរូបមន្តចុងក្រោយមិនអាស្រ័យលើមុំរវាង $(F_(exp.av.))↖(→)$ និង $(∆x)↖(→)$ ទេ។ ការងាររបស់កម្លាំងយឺតអាស្រ័យតែលើការខូចទ្រង់ទ្រាយនៃនិទាឃរដូវនៅក្នុងរដ្ឋដំបូងនិងចុងក្រោយ។
ដូច្នេះ កម្លាំងយឺត ដូចជាទំនាញផែនដី គឺជាកម្លាំងអភិរក្ស។
អំណាចនៃកម្លាំង
ថាមពលគឺជាបរិមាណរូបវន្តដែលវាស់វែងដោយសមាមាត្រនៃការងារទៅនឹងរយៈពេលដែលវាត្រូវបានផលិត។
ម្យ៉ាងវិញទៀត ថាមពលបង្ហាញពីចំនួនការងារដែលត្រូវធ្វើក្នុងមួយឯកតានៃពេលវេលា (ក្នុង SI សម្រាប់ $1$s)។
ថាមពលត្រូវបានកំណត់ដោយរូបមន្ត៖
ដែល $N$ ជាអំណាច $A$ គឺជាការងារដែលបានធ្វើនៅក្នុងពេលវេលា $∆t$ ។
ការជំនួស $A=F|(∆r)↖(→)|cosα$ ទៅក្នុងរូបមន្ត $N=(A)/(∆t)$ ជំនួសឱ្យការងារ $A$ យើងទទួលបាន៖
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
ថាមពលគឺស្មើនឹងផលិតផលនៃម៉ូឌុលនៃវ៉ិចទ័រកម្លាំង និងល្បឿន និងកូស៊ីនុសនៃមុំរវាងវ៉ិចទ័រទាំងនេះ។
ថាមពលនៅក្នុងប្រព័ន្ធ SI ត្រូវបានវាស់ជាវ៉ាត់ (W) ។ មួយវ៉ាត់ ($1$ W) គឺជាថាមពលដែល $1$ J នៃការងារត្រូវបានធ្វើក្នុង $1$s: $1$ W $= 1$ J/s ។
អង្គភាពនេះត្រូវបានដាក់ឈ្មោះតាមអ្នកបង្កើតជនជាតិអង់គ្លេស J. Watt (វ៉ាត់) ដែលបានសាងសង់ម៉ាស៊ីនចំហាយទឹកដំបូង។ J. Watt ខ្លួនគាត់ (1736-1819) បានប្រើឯកតាផ្សេងគ្នានៃថាមពល - សេះ (hp) ដែលគាត់បានណែនាំដើម្បីអាចប្រៀបធៀបដំណើរការរបស់ម៉ាស៊ីនចំហាយទឹកនិងសេះ: $ 1 $ hp ។ $= 735.5$ ថ្ងៃអង្គារ។
ក្នុងបច្ចេកវិជ្ជា ឯកតាធំនៃថាមពលច្រើនតែត្រូវបានប្រើប្រាស់ - គីឡូវ៉ាត់ និងមេហ្គាវ៉ាត់៖ $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W ។
ថាមពល Kinetic ។ ច្បាប់នៃការផ្លាស់ប្តូរថាមពល kinetic
ប្រសិនបើរាងកាយ ឬសាកសពអន្តរកម្មជាច្រើន (ប្រព័ន្ធសាកសព) អាចដំណើរការបាន នោះពួកគេនិយាយថា ពួកគេមានថាមពល។
ពាក្យ "ថាមពល" (មកពីភាសាក្រិក។ ថាមពល - សកម្មភាពសកម្មភាព) ត្រូវបានគេប្រើជាញឹកញាប់នៅក្នុងជីវិតប្រចាំថ្ងៃ។ ដូច្នេះជាឧទាហរណ៍ មនុស្សដែលអាចធ្វើការងារបានរហ័សត្រូវបានគេហៅថាស្វាហាប់ដោយថាមពលដ៏អស្ចារ្យ។
ថាមពលដែលរាងកាយមានដោយសារចលនាត្រូវបានគេហៅថាថាមពល kinetic ។
ដូចនៅក្នុងករណីនៃនិយមន័យនៃថាមពលជាទូទៅ យើងអាចនិយាយបានអំពីថាមពល kinetic ថាថាមពល kinetic គឺជាសមត្ថភាពនៃរាងកាយដែលមានចលនាដើម្បីធ្វើការ។
អនុញ្ញាតឱ្យយើងរកឃើញថាមពល kinetic នៃតួនៃម៉ាស់ $m$ ផ្លាស់ទីដោយល្បឿន $υ$ ។ ដោយសារថាមពល kinetic គឺជាថាមពលដោយសារចលនា ស្ថានភាពសូន្យសម្រាប់វាគឺជាស្ថានភាពដែលរាងកាយសម្រាក។ ដោយបានរកឃើញការងារចាំបាច់ដើម្បីទាក់ទងល្បឿនដែលបានផ្តល់ឱ្យរាងកាយ យើងនឹងរកឃើញថាមពល kinetic របស់វា។
ដើម្បីធ្វើដូចនេះយើងគណនាការងារដែលបានធ្វើនៅលើផ្នែកផ្លាស់ទីលំនៅ $∆r↖(→)$ នៅពេលដែលទិសដៅនៃវ៉ិចទ័រកម្លាំង $F↖(→)$ និងការផ្លាស់ទីលំនៅ $∆r↖(→)$ ស្របគ្នា។ ក្នុងករណីនេះការងារគឺ
ដែល $∆x=∆r$

សម្រាប់ចលនានៃចំណុចដែលមានការបង្កើនល្បឿន $α=const$ កន្សោមសម្រាប់ចលនាមានទម្រង់៖
$∆x=υ_1t+(នៅ^2)/(2),$
ដែល $υ_1$ គឺជាល្បឿនដំបូង។
ការជំនួសកន្សោមសម្រាប់ $∆x$ ពី $∆x=υ_1t+(at^2)/(2)$ ទៅក្នុងសមីការ $A=F ∆x$ ហើយដោយប្រើច្បាប់ទីពីររបស់ញូតុន $F=ma$ យើងទទួលបាន៖
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
បង្ហាញពីការបង្កើនល្បឿនក្នុងលក្ខខណ្ឌនៃ $υ_1$ ដំបូង និងចុងក្រោយ $υ_2$ ល្បឿន $a=(υ_2-υ_1)/(t)$ ហើយជំនួសទៅជា $A=ma(υ_1t+(at^2)/(2))=( mat)/ (2)(2υ_1+at)$ យើងមាន៖
$A=(m(υ_2-υ_1))/(2) (2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
ឥឡូវនេះ ស្មើនឹងល្បឿនដំបូងទៅសូន្យ៖ $υ_1=0$ យើងទទួលបានកន្សោមសម្រាប់ ថាមពល kinetic:
$E_K=(mυ)/(2)=(p^2)/(2m)$
ដូច្នេះរាងកាយដែលមានចលនាមានថាមពល kinetic ។ ថាមពលនេះគឺស្មើនឹងការងារដែលត្រូវធ្វើដើម្បីបង្កើនល្បឿននៃរាងកាយពីសូន្យទៅ $υ$ ។
ចាប់ពី $E_K=(mυ)/(2)=(p^2)/(2m)$ វាធ្វើតាមថា ការងាររបស់កម្លាំងដើម្បីផ្លាស់ទីរាងកាយពីទីតាំងមួយទៅទីតាំងមួយទៀត គឺស្មើនឹងការផ្លាស់ប្តូរថាមពល kinetic៖
$A=E_(K_2)-E_(K_1)=∆E_K$
សមភាព $A=E_(K_2)-E_(K_1)=∆E_K$ បង្ហាញ ទ្រឹស្តីបទស្តីពីការផ្លាស់ប្តូរថាមពល kinetic ។
ការផ្លាស់ប្តូរថាមពល kinetic នៃរាងកាយ(ចំណុចសម្ភារៈ) សម្រាប់រយៈពេលជាក់លាក់មួយគឺស្មើនឹងការងារដែលបានធ្វើក្នុងអំឡុងពេលនេះដោយកម្លាំងដែលធ្វើសកម្មភាពលើរាងកាយ។
ថាមពលសក្តានុពល
ថាមពលសក្តានុពលគឺជាថាមពលដែលកំណត់ដោយការរៀបចំទៅវិញទៅមកនៃសាកសពអន្តរកម្ម ឬផ្នែកនៃរាងកាយដូចគ្នា។
ដោយសារថាមពលត្រូវបានកំណត់ថាជាសមត្ថភាពរបស់រាងកាយក្នុងការធ្វើការងារ ថាមពលសក្តានុពលត្រូវបានកំណត់ពីធម្មជាតិថាជាការងាររបស់កម្លាំងដែលអាស្រ័យតែលើទីតាំងដែលទាក់ទងនៃសាកសពប៉ុណ្ណោះ។ នេះគឺជាការងារទំនាញ $A=mgh_1-mgh_2=mgH$ និងការងារនៃការបត់បែន៖
$A=(kx_0^2)/(2)-(kx^2)/(2)$
ថាមពលសក្តានុពលនៃរាងកាយអន្តរកម្មជាមួយផែនដីត្រូវបានគេហៅថាតម្លៃស្មើនឹងផលិតផលនៃម៉ាស់ $m$ នៃរាងកាយនេះ និងការបង្កើនល្បឿនធ្លាក់ចុះដោយឥតគិតថ្លៃ $g$ និងកម្ពស់ $h$ នៃរាងកាយពីលើផ្ទៃផែនដី៖
ថាមពលសក្តានុពលនៃរាងកាយដែលខូចទ្រង់ទ្រាយយឺតគឺតម្លៃស្មើនឹងពាក់កណ្តាលនៃផលិតផលនៃមេគុណនៃការបត់បែន (ភាពរឹង) $k$ នៃរាងកាយ និងការ៉េនៃការខូចទ្រង់ទ្រាយ $∆l$:
$E_p=(1)/(2)k∆l^2$
ការងារនៃកម្លាំងអភិរក្ស (ទំនាញផែនដី និងការបត់បែន) ដោយគិតគូរពី $E_p=mgh$ និង $E_p=(1)/(2)k∆l^2$ ត្រូវបានបង្ហាញដូចខាងក្រោម៖
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
រូបមន្តនេះអនុញ្ញាតឱ្យយើងផ្តល់និយមន័យទូទៅនៃថាមពលសក្តានុពល។
ថាមពលសក្តានុពលនៃប្រព័ន្ធគឺជាតម្លៃដែលអាស្រ័យលើទីតាំងនៃសាកសពការផ្លាស់ប្តូរដែលក្នុងអំឡុងពេលនៃការផ្លាស់ប្តូរនៃប្រព័ន្ធពីរដ្ឋដំបូងទៅរដ្ឋចុងក្រោយគឺស្មើនឹងការងាររបស់កងកម្លាំងអភិរក្សផ្ទៃក្នុងនៃប្រព័ន្ធ។ យកជាមួយសញ្ញាផ្ទុយ។
សញ្ញាដកនៅជ្រុងខាងស្តាំនៃសមីការ $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ មានន័យថានៅពេលដែលការងារត្រូវបានធ្វើដោយកម្លាំងផ្ទៃក្នុង ( ឧទាហរណ៍ ការធ្លាក់ខ្លួនប្រាណទៅដីក្រោមសកម្មភាពនៃទំនាញនៅក្នុងប្រព័ន្ធ "ថ្ម-ផែនដី") ថាមពលនៃប្រព័ន្ធថយចុះ។ ការងារ និងការផ្លាស់ប្តូរថាមពលសក្តានុពលនៅក្នុងប្រព័ន្ធតែងតែមានសញ្ញាផ្ទុយគ្នា។
ដោយសារការងារកំណត់តែការផ្លាស់ប្តូរថាមពលសក្តានុពល មានតែការផ្លាស់ប្តូរថាមពលប៉ុណ្ណោះដែលមានអត្ថន័យរូបវន្តនៅក្នុងមេកានិច។ ដូច្នេះជម្រើសនៃកម្រិតថាមពលសូន្យគឺបំពានហើយត្រូវបានកំណត់ដោយការពិចារណាលើភាពងាយស្រួលឧទាហរណ៍ភាពងាយស្រួលនៃការសរសេរសមីការដែលត្រូវគ្នា។
ច្បាប់នៃការផ្លាស់ប្តូរ និងការអភិរក្សថាមពលមេកានិក
ថាមពលមេកានិកសរុបនៃប្រព័ន្ធផលបូកនៃថាមពល kinetic និងសក្តានុពលរបស់វាត្រូវបានគេហៅថា:
វាត្រូវបានកំណត់ដោយទីតាំងនៃសាកសព (ថាមពលសក្តានុពល) និងល្បឿនរបស់វា (ថាមពល kinetic) ។
យោងទៅតាមទ្រឹស្តីបទថាមពល kinetic ។
$E_k-E_(k_1)=A_p+A_(pr),$
ដែលជាកន្លែងដែល $А_р$ គឺជាការងាររបស់កម្លាំងសក្តានុពល $А_(pr)$ គឺជាការងាររបស់កងកម្លាំងគ្មានសក្តានុពល។
នៅក្នុងវេន ការងារនៃកម្លាំងសក្តានុពលគឺស្មើនឹងភាពខុសគ្នានៃថាមពលសក្តានុពលនៃរាងកាយនៅក្នុងរដ្ឋ $E_(p_1)$ និងចុងក្រោយ $E_p$ ។ ជាមួយនឹងគំនិតនេះ យើងទទួលបានការបញ្ចេញមតិសម្រាប់ ច្បាប់នៃការផ្លាស់ប្តូរថាមពលមេកានិច៖
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
ដែលផ្នែកខាងឆ្វេងនៃសមភាពគឺជាការផ្លាស់ប្តូរថាមពលមេកានិកសរុប ហើយផ្នែកខាងស្តាំគឺជាការងាររបស់កម្លាំងគ្មានសក្តានុពល។
ដូច្នេះ ច្បាប់នៃការផ្លាស់ប្តូរថាមពលមេកានិចអាន៖
ការផ្លាស់ប្តូរថាមពលមេកានិកនៃប្រព័ន្ធគឺស្មើនឹងការងាររបស់កងកម្លាំងមិនសក្តានុពលទាំងអស់។
ប្រព័ន្ធមេកានិកដែលមានតែកម្លាំងដែលមានសក្តានុពលប៉ុណ្ណោះដែលធ្វើសកម្មភាពត្រូវបានគេហៅថាអភិរក្ស។
នៅក្នុងប្រព័ន្ធអភិរក្ស $A_(pr) = 0$ ។ នេះបង្កប់ន័យ ច្បាប់នៃការអភិរក្សថាមពលមេកានិច៖
នៅក្នុងប្រព័ន្ធអភិរក្សបិទជិត ថាមពលមេកានិកសរុបត្រូវបានរក្សាទុក (មិនផ្លាស់ប្តូរតាមពេលវេលា)៖
$E_k+E_p=E_(k_1)+E_(p_1)$
ច្បាប់នៃការអភិរក្សថាមពលមេកានិកគឺបានមកពីច្បាប់នៃមេកានិចញូតុន ដែលអាចអនុវត្តបានចំពោះប្រព័ន្ធនៃចំណុចសម្ភារៈ (ឬម៉ាក្រូភាគល្អិត)។
ទោះជាយ៉ាងណាក៏ដោយ ច្បាប់នៃការអភិរក្សថាមពលមេកានិកក៏មានសុពលភាពសម្រាប់ប្រព័ន្ធនៃមីក្រូភាគល្អិត ដែលច្បាប់របស់ញូតុនខ្លួនឯងលែងអនុវត្តទៀតហើយ។
ច្បាប់នៃការអភិរក្សថាមពលមេកានិចគឺជាផលវិបាកនៃភាពដូចគ្នានៃពេលវេលា។
ភាពស្របគ្នានៃពេលវេលាគឺថានៅក្រោមលក្ខខណ្ឌដំបូងដូចគ្នា ដំណើរនៃដំណើរការរាងកាយមិនអាស្រ័យលើពេលដែលលក្ខខណ្ឌទាំងនេះត្រូវបានបង្កើតឡើងនោះទេ។
ច្បាប់នៃការអភិរក្សថាមពលមេកានិកសរុបមានន័យថានៅពេលដែលថាមពល kinetic នៅក្នុងប្រព័ន្ធអភិរក្សផ្លាស់ប្តូរ ថាមពលសក្តានុពលរបស់វាក៏ត្រូវតែផ្លាស់ប្តូរដែរ ដូច្នេះហើយផលបូករបស់វានៅតែថេរ។ នេះមានន័យថាលទ្ធភាពនៃការបំប្លែងថាមពលមួយប្រភេទទៅជាថាមពលមួយទៀត។
ដោយអនុលោមតាមទម្រង់ផ្សេងៗនៃចលនានៃរូបធាតុ ប្រភេទផ្សេងៗនៃថាមពលត្រូវបានពិចារណា៖ មេកានិច ខាងក្នុង (ស្មើនឹងផលបូកនៃថាមពល kinetic នៃចលនាច្របូកច្របល់នៃម៉ូលេគុលដែលទាក់ទងទៅនឹងកណ្តាលនៃម៉ាសនៃរាងកាយ និងថាមពលសក្តានុពលនៃ អន្តរកម្មនៃម៉ូលេគុលជាមួយគ្នាទៅវិញទៅមក), អេឡិចត្រូម៉ាញ៉េទិច, គីមី (ដែលមានថាមពលកលណិកនៃចលនានៃអេឡិចត្រុងនិងអគ្គិសនីថាមពលនៃអន្តរកម្មរបស់ពួកគេជាមួយគ្នាទៅវិញទៅមកនិងជាមួយស្នូលអាតូម) ថាមពលនុយក្លេអ៊ែរ។ ការលើកឡើងខាងលើថា ការបែងចែកថាមពលទៅជាប្រភេទផ្សេងគ្នាគឺបំពាន។
បាតុភូតធម្មជាតិជាធម្មតាត្រូវបានអមដោយការបំប្លែងថាមពលប្រភេទមួយទៅជាថាមពលមួយទៀត។ ដូច្នេះ ជាឧទាហរណ៍ ការកកិតនៃផ្នែកនៃយន្តការផ្សេងៗនាំទៅដល់ការបំប្លែងថាមពលមេកានិកទៅជាកំដៅ ពោលគឺទៅជា ថាមពលខាងក្នុង។នៅក្នុងម៉ាស៊ីនកំដៅ, នៅលើផ្ទុយមកវិញ, ថាមពលខាងក្នុងត្រូវបានបម្លែងទៅជាថាមពលមេកានិច; នៅក្នុងកោសិកា galvanic ថាមពលគីមីត្រូវបានបំប្លែងទៅជាថាមពលអគ្គិសនី។ល។
បច្ចុប្បន្ននេះ គំនិតនៃថាមពល គឺជាគំនិតជាមូលដ្ឋានមួយនៃរូបវិទ្យា។ គំនិតនេះត្រូវបានភ្ជាប់ដោយ inextricably ជាមួយនឹងគំនិតនៃការផ្លាស់ប្តូរនៃទម្រង់មួយនៃចលនាទៅជាមួយផ្សេងទៀត។
នេះជារបៀបដែលគំនិតនៃថាមពលត្រូវបានបង្កើតឡើងនៅក្នុងរូបវិទ្យាទំនើប៖
ថាមពលគឺជារង្វាស់បរិមាណទូទៅនៃចលនា និងអន្តរកម្មនៃរូបធាតុគ្រប់ប្រភេទ។ ថាមពលមិនកើតចេញពីអ្វីទាំងអស់ហើយមិនបាត់ទៅវិញទេ វាអាចឆ្លងពីទម្រង់មួយទៅទម្រង់មួយប៉ុណ្ណោះ។ គំនិតនៃថាមពលភ្ជាប់ជាមួយបាតុភូតទាំងអស់នៃធម្មជាតិ។
យន្តការសាមញ្ញ។ ប្រសិទ្ធភាពនៃយន្តការ
យន្តការសាមញ្ញ គឺជាឧបករណ៍ដែលផ្លាស់ប្តូរទំហំ ឬទិសដៅនៃកម្លាំងដែលបានអនុវត្តទៅលើរាងកាយ។
ពួកវាត្រូវបានប្រើដើម្បីផ្លាស់ទី ឬលើកបន្ទុកធំដោយមានការខិតខំប្រឹងប្រែងតិចតួច។ ទាំងនេះរួមបញ្ចូលដងថ្លឹង និងពូជរបស់វា - ប្លុក (ចល័ត និងថេរ) ច្រកទ្វារ យន្តហោះទំនោរ និងពូជរបស់វា - ក្រូចឆ្មារ វីស។ល។
ដៃចង្កូត។ ក្បួនដង្ហែ
ដងថ្លឹងគឺជាតួរឹងដែលមានសមត្ថភាពបង្វិលជុំវិញជំនួយថេរ។

ច្បាប់អានុភាពនិយាយថា៖
ដងថ្លឹងស្ថិតក្នុងលំនឹង ប្រសិនបើកម្លាំងដែលបានអនុវត្តទៅលើវាមានសមាមាត្រច្រាសទៅនឹងដៃរបស់ពួកគេ៖
$(F_2)/(F_1)=(l_1)/(l_2)$
ពីរូបមន្ត $(F_2)/(F_1)=(l_1)/(l_2)$ អនុវត្តទ្រព្យសម្បត្តិសមាមាត្រទៅវា (ផលិតផលនៃលក្ខខណ្ឌខ្លាំងនៃសមាមាត្រគឺស្មើនឹងផលិតផលនៃលក្ខខណ្ឌកណ្តាលរបស់វា) យើង អាចទទួលបានរូបមន្តដូចខាងក្រោមៈ
ប៉ុន្តែ $F_1l_1=M_1$ គឺជាពេលវេលានៃកម្លាំងដែលទំនោរទៅបង្វិលដងថ្លឹងតាមទ្រនិចនាឡិកា ហើយ $F_2l_2=M_2$ គឺជាពេលវេលានៃកម្លាំងដែលទំនោរទៅបង្វិលដងថ្លឹងច្រាសទ្រនិចនាឡិកា។ ដូច្នេះ $M_1=M_2$ ដែលត្រូវបង្ហាញ។
ដង្កៀបចាប់ផ្ដើមប្រើដោយមនុស្សនៅសម័យបុរាណ។ ដោយមានជំនួយរបស់វា វាអាចធ្វើទៅបានដើម្បីលើកបន្ទះថ្មធ្ងន់ៗកំឡុងពេលសាងសង់ពីរ៉ាមីតនៅប្រទេសអេហ្ស៊ីបបុរាណ។ បើគ្មានអានុភាព វានឹងមិនអាចទៅរួចនោះទេ។ ជាឧទាហរណ៍ សម្រាប់ការសាងសង់ពីរ៉ាមីត Cheops ដែលមានកម្ពស់ 147$ m ដុំថ្មជាងពីរលានត្រូវបានប្រើប្រាស់ ដែលតូចបំផុតមានទម្ងន់ 2.5$ តោន!
សព្វថ្ងៃនេះ ដៃចង្កូតត្រូវបានគេប្រើយ៉ាងទូលំទូលាយទាំងក្នុងផលិតកម្ម (ឧទាហរណ៍ ស្ទូច) និងក្នុងជីវិតប្រចាំថ្ងៃ (កន្ត្រៃ កាត់ខ្សែ ជញ្ជីង)។
ប្លុកថេរ
សកម្មភាពនៃប្លុកថេរគឺស្រដៀងគ្នាទៅនឹងសកម្មភាពនៃ lever ដែលមានអានុភាពស្មើគ្នា៖ $l_1=l_2=r$ ។ កម្លាំងដែលបានអនុវត្ត $F_1$ គឺស្មើនឹងបន្ទុក $F_2$ ហើយលក្ខខណ្ឌលំនឹងគឺ៖
ប្លុកថេរប្រើនៅពេលដែលអ្នកត្រូវការផ្លាស់ប្តូរទិសដៅនៃកម្លាំងដោយមិនផ្លាស់ប្តូរទំហំរបស់វា។
ប្លុកដែលអាចចល័តបាន។
ប្លុកដែលអាចចល័តបានធ្វើសកម្មភាពស្រដៀងគ្នាទៅនឹងដងថ្លឹង ដែលដៃមាន៖ $l_2=(l_1)/(2)=r$ ។ ក្នុងករណីនេះ លក្ខខណ្ឌលំនឹងមានទម្រង់៖
ដែល $F_1$ ជាកម្លាំងអនុវត្ត $F_2$ គឺជាបន្ទុក។ ការប្រើប្រាស់ប្លុកដែលអាចចល័តបានផ្តល់នូវការកើនឡើងនៃកម្លាំងពីរដង។
Polyspast (ប្រព័ន្ធប្លុក)
ឧបករណ៍លើកខ្សែសង្វាក់ធម្មតាមាន $n$ ចល័ត និង $n$ ប្លុកថេរ។ ការអនុវត្តវាផ្តល់នូវកម្លាំង 2n$ ដង៖
$F_1=(F_2)/(2n)$
ខ្សែសង្វាក់ថាមពលមាន n អាចចល័តបាន និងប្លុកថេរមួយ។ ការប្រើប្រាស់ឧបករណ៍ស្ទូចខ្សែសង្វាក់ថាមពលផ្តល់នូវកម្លាំង 2^n$ ដង៖
$F_1=(F_2)/(2^n)$

វីស
វីសគឺជាយន្តហោះទំនោរដែលរងរបួសនៅលើអ័ក្ស។

លក្ខខណ្ឌសម្រាប់តុល្យភាពនៃកម្លាំងដែលដើរតួនៅលើវីសមានទម្រង់:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

ដែលជាកន្លែងដែល $F_1$ គឺជាកម្លាំងខាងក្រៅដែលបានអនុវត្តទៅវីស និងធ្វើសកម្មភាពនៅចម្ងាយ $R$ ពីអ័ក្សរបស់វា; $F_2$ គឺជាកម្លាំងដែលដើរតួក្នុងទិសដៅនៃអ័ក្សវីស។ $h$ - វីសស្ពឺ; $r$ គឺជាកាំខ្សែស្រឡាយមធ្យម; $α$ គឺជាមុំនៃខ្សែស្រឡាយ។ $R$ គឺជាប្រវែងនៃដងថ្លឹង ( wrench) ដែលបង្វិលវីសដោយកម្លាំង $F_1$ ។
ប្រសិទ្ធភាព
មេគុណនៃការអនុវត្ត (COP) - សមាមាត្រនៃការងារមានប្រយោជន៍ចំពោះការងារទាំងអស់ដែលបានចំណាយ។
ប្រសិទ្ធភាពត្រូវបានបង្ហាញជាភាគរយជាញឹកញាប់ ហើយត្រូវបានបង្ហាញដោយអក្សរក្រិក $η$ ("នេះ"):
$η=(A_p)/(A_3) 100%$
ដែល $A_n$ ជាការងារមានប្រយោជន៍ $A_3$ គឺជាការងារទាំងអស់ដែលត្រូវចំណាយ។
ការងារដែលមានប្រយោជន៍គឺតែងតែជាផ្នែកមួយនៃការងារសរុបដែលមនុស្សម្នាក់ចំណាយដោយប្រើយន្តការនេះឬនោះ។
ផ្នែកមួយនៃការងារដែលបានធ្វើគឺត្រូវចំណាយលើការយកឈ្នះលើកម្លាំងនៃការកកិត។ ចាប់តាំងពី $А_3 > А_п$ ប្រសិទ្ធភាពគឺតែងតែតិចជាង $1$ (ឬ $< 100%$).
ដោយសារការងារនីមួយៗនៅក្នុងសមីការនេះអាចត្រូវបានបង្ហាញជាផលិតផលនៃកម្លាំងដែលត្រូវគ្នា និងចម្ងាយដែលបានធ្វើដំណើរ វាអាចត្រូវបានសរសេរឡើងវិញដូចខាងក្រោម៖ $F_1s_1≈F_2s_2$ ។
ពីនេះវាដូចខាងក្រោម, ការឈ្នះដោយមានជំនួយពីយន្តការជាធរមាន យើងចាញ់ចំនួនដងដូចគ្នានៅតាមផ្លូវ ហើយច្រាសមកវិញ. ច្បាប់នេះត្រូវបានគេហៅថាច្បាប់មាសនៃមេកានិច។
ច្បាប់មាសនៃមេកានិចគឺជាច្បាប់ប្រហាក់ប្រហែល ព្រោះវាមិនគិតពីការងារដើម្បីជំនះការកកិត និងទំនាញនៃផ្នែកនៃឧបករណ៍ដែលបានប្រើ។ ទោះជាយ៉ាងណាក៏ដោយ វាអាចមានប្រយោជន៍ខ្លាំងណាស់នៅពេលវិភាគប្រតិបត្តិការនៃយន្តការសាមញ្ញណាមួយ។

ដូច្នេះ ជាឧទាហរណ៍ ដោយសារច្បាប់នេះ យើងអាចនិយាយបានភ្លាមៗថា កម្មករដែលបង្ហាញក្នុងរូបនោះ ជាមួយនឹងការកើនឡើងទ្វេដងក្នុងកម្លាំងលើក 10 ដុល្លារសង់ទីម៉ែត្រ នឹងត្រូវបន្ថយចុងម្ខាងនៃដងថ្លឹង 20 ដុល្លារ។ សង់ទីម៉ែត។
ការប៉ះទង្គិចនៃសាកសព។ ផលប៉ះពាល់នៃការបត់បែននិង inelastic
ច្បាប់នៃការអភិរក្សនៃសន្ទុះ និងថាមពលមេកានិក ត្រូវបានប្រើដើម្បីដោះស្រាយបញ្ហានៃចលនារបស់សាកសពបន្ទាប់ពីការប៉ះទង្គិចគ្នា៖ សន្ទុះ និងថាមពលដែលគេស្គាល់មុនពេលប៉ះទង្គិចត្រូវបានប្រើដើម្បីកំណត់តម្លៃនៃបរិមាណទាំងនេះបន្ទាប់ពីការប៉ះទង្គិច។ ពិចារណាករណីនៃផលប៉ះពាល់នៃការយឺត និង inelastic ។
ផលប៉ះពាល់ដែលមិនអាចបត់បែនបានយ៉ាងពិតប្រាកដត្រូវបានគេហៅថា បន្ទាប់ពីនោះសាកសពបង្កើតបានជារូបកាយតែមួយដែលផ្លាស់ទីក្នុងល្បឿនជាក់លាក់មួយ។ បញ្ហានៃល្បឿននៃក្រោយគឺត្រូវបានដោះស្រាយដោយប្រើច្បាប់នៃការអភិរក្សនៃសន្ទុះសម្រាប់ប្រព័ន្ធនៃសាកសពដែលមានម៉ាស់ $m_1$ និង $m_2$ (ប្រសិនបើយើងកំពុងនិយាយអំពីសាកសពពីរ) មុននិងក្រោយផលប៉ះពាល់:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
ជាក់ស្តែង ថាមពល kinetic នៃរូបកាយមិនត្រូវបានរក្សាកំឡុងពេលមានផលប៉ះពាល់មិនស្មើគ្នាទេ (ឧទាហរណ៍ នៅ $(υ_1)↖(→)=-(υ_2)↖(→)$ និង $m_1=m_2$ វាក្លាយជាស្មើសូន្យបន្ទាប់ពី ផលប៉ះពាល់) ។
ផលប៉ះពាល់នៃការបត់បែនយ៉ាងពិតប្រាកដត្រូវបានគេហៅថា ដែលក្នុងនោះមិនត្រឹមតែផលបូកនៃកម្លាំងរុញច្រានត្រូវបានរក្សាទុកប៉ុណ្ណោះទេ ប៉ុន្តែក៏ជាផលបូកនៃថាមពល kinetic នៃសាកសពដែលប៉ះទង្គិចគ្នាផងដែរ។
សម្រាប់ផលប៉ះពាល់នៃការបត់បែនយ៉ាងពិតប្រាកដ សមីការ
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2) )^2)/(2)$
ដែល $m_1, m_2$ គឺជាម៉ាស់របស់បាល់ $υ_1, υ_2$ គឺជាល្បឿននៃបាល់មុនពេលប៉ះ, $υ"_1, υ"_2$ គឺជាល្បឿននៃបាល់បន្ទាប់ពីការប៉ះ។
កម្លាំងរុញច្រាន និងសន្ទុះនៃរាងកាយ
ដូចដែលបានបង្ហាញច្បាប់ទីពីររបស់ញូវតុនអាចត្រូវបានសរសេរជា
Ft=mv-mv o=p-p o=D ទំ។
បរិមាណវ៉ិចទ័រ Ft ដែលស្មើនឹងផលិតផលនៃកម្លាំងនិងពេលវេលានៃសកម្មភាពរបស់វាត្រូវបានគេហៅថា សន្ទុះនៃកម្លាំង. បរិមាណវ៉ិចទ័រ p=mv ដែលស្មើនឹងផលិតផលនៃម៉ាស់រាងកាយ និងល្បឿនរបស់វាត្រូវបានគេហៅថា សន្ទុះរាងកាយ.
នៅក្នុង SI ឯកតានៃសន្ទុះគឺជាសន្ទុះនៃរាងកាយដែលមានម៉ាស់ 1 គីឡូក្រាមផ្លាស់ទីក្នុងល្បឿន 1 m/s ពោលគឺឧ។ ឯកតានៃសន្ទុះគឺគីឡូក្រាមក្នុងមួយវិនាទី (1 គីឡូក្រាម m / s) ។
ការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃរាងកាយ D p ក្នុងរយៈពេល t គឺស្មើនឹងសន្ទុះនៃកម្លាំង Ft ដែលធ្វើសកម្មភាពលើរាងកាយក្នុងអំឡុងពេលនេះ។
គោលគំនិតនៃសន្ទុះ គឺជាគោលគំនិតជាមូលដ្ឋានមួយនៃរូបវិទ្យា។ សន្ទុះនៃរាងកាយគឺជាបរិមាណមួយដែលមានសមត្ថភាព នៅក្រោមលក្ខខណ្ឌជាក់លាក់នៃការរក្សាតម្លៃរបស់វាមិនផ្លាស់ប្តូរ។(ប៉ុន្តែម៉ូឌុលនិងទិសដៅ) ។
ការអភិរក្សសន្ទុះសរុបនៃប្រព័ន្ធបិទជិត
ប្រព័ន្ធបិទហៅក្រុមសាកសពដែលមិនទាក់ទងជាមួយសាកសពផ្សេងទៀតដែលមិនមែនជាផ្នែកនៃក្រុមនេះ។ កម្លាំងនៃអន្តរកម្មរវាងសាកសពនៅក្នុងប្រព័ន្ធបិទជិតត្រូវបានគេហៅថា ខាងក្នុង. (កម្លាំងខាងក្នុងជាធម្មតាត្រូវបានតំណាងដោយអក្សរ f) ។
ពិចារណាពីអន្តរកម្មនៃសាកសពនៅក្នុងប្រព័ន្ធបិទជិតមួយ។ អនុញ្ញាតឱ្យបាល់ពីរដែលមានអង្កត់ផ្ចិតដូចគ្នាដែលធ្វើពីសារធាតុផ្សេងៗគ្នា (នោះគឺមានម៉ាស់ខុសៗគ្នា) រមៀលលើផ្ទៃផ្ដេករលោងឥតខ្ចោះហើយបុកគ្នាទៅវិញទៅមក។ ក្នុងអំឡុងពេលនៃផលប៉ះពាល់ ដែលយើងនឹងពិចារណាពីចំណុចកណ្តាល និងពិតជាយឺត ល្បឿន និងសន្ទុះនៃបាល់ផ្លាស់ប្តូរ។ អនុញ្ញាតឱ្យម៉ាស់នៃបាល់ទីមួយ m 1 ល្បឿនរបស់វាមុនពេលផលប៉ះពាល់ V 1 និងបន្ទាប់ពីផលប៉ះពាល់ V 1 "; ម៉ាស់នៃគ្រាប់បាល់ទីពីរ m 2 ល្បឿនរបស់វាមុនពេលផលប៉ះពាល់ v 2 បន្ទាប់ពីផលប៉ះពាល់ v 2" ។ យោងតាមច្បាប់ទី 3 របស់ញូវតុន កម្លាំងអន្តរកម្មរវាងបាល់គឺស្មើគ្នានៅក្នុងតម្លៃដាច់ខាត និងផ្ទុយគ្នាក្នុងទិសដៅពោលគឺឧ។ f 1 \u003d -f ២.
យោងតាមច្បាប់ទី 2 របស់ញូវតុន ការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃបាល់ដែលជាលទ្ធផលនៃការប៉ះទង្គិចរបស់ពួកគេគឺស្មើនឹងសន្ទុះនៃកម្លាំងនៃអន្តរកម្មរវាងពួកវា ពោលគឺឧ។
m 1 v 1 "-m 1 v 1 \u003d f 1 t (3.1)
m 2 v 2 "-m 2 v 2 \u003d f 2 t (3.2)
ដែល t គឺជាពេលវេលានៃអន្តរកម្មនៃបាល់។
ការបន្ថែមកន្សោម (3.1) និង (3.2) ពាក្យតាមពាក្យ យើងរកឃើញថា
m 1 v 1 "-m 1 v 1 + m 2 v 2 "-m 2 v 2 \u003d 0 ។
អាស្រ័យហេតុនេះ
m 1 v 1 "+m 2 v 2" \u003d m 1 v 1 + m 2 v 2
ឬបើមិនដូច្នេះទេ។
p 1 "+p 2" \u003d p 1 +p 2 ។ (3.3)
ចូរយើងសម្គាល់ p 1 "+p 2" = p" និង p 1 +p 2 =p ។
ផលបូកវ៉ិចទ័រនៃកម្លាំងរុញច្រាននៃសាកសពទាំងអស់ដែលរួមបញ្ចូលនៅក្នុងប្រព័ន្ធត្រូវបានគេហៅថា កម្លាំងពេញលេញនៃប្រព័ន្ធនេះ។. ពី (3.3) វាអាចត្រូវបានគេមើលឃើញថា p "= p, i.e. p" - p \u003d D p \u003d 0 ដូច្នេះ,
p=p 1 +p 2 = const ។
រូបមន្ត (3.4) បង្ហាញ ច្បាប់នៃការអភិរក្សសន្ទុះនៅក្នុងប្រព័ន្ធបិទជិតដែលត្រូវបានរៀបចំដូចខាងក្រោមៈ សន្ទុះសរុបនៃប្រព័ន្ធបិទជិតនៃសាកសពនៅតែថេរសម្រាប់អន្តរកម្មណាមួយនៃសាកសពនៃប្រព័ន្ធនេះជាមួយគ្នាទៅវិញទៅមក។
ម្យ៉ាងវិញទៀត កម្លាំងខាងក្នុងមិនអាចផ្លាស់ប្តូរសន្ទុះសរុបនៃប្រព័ន្ធទាំងតម្លៃដាច់ខាត ឬក្នុងទិសដៅ។
ការផ្លាស់ប្តូរនៅក្នុងសន្ទុះសរុបនៃប្រព័ន្ធបើកចំហ
ក្រុមនៃរូបកាយដែលមានអន្តរកម្មមិនត្រឹមតែជាមួយគ្នាប៉ុណ្ណោះទេ ថែមទាំងជាមួយសាកសពដែលមិនមែនជាផ្នែកនៃក្រុមនេះផងដែរ ត្រូវបានគេហៅថា ប្រព័ន្ធបើកចំហ. កម្លាំងដែលសាកសពដែលមិនត្រូវបានរួមបញ្ចូលនៅក្នុងប្រព័ន្ធនេះធ្វើសកម្មភាពលើតួនៃប្រព័ន្ធដែលបានផ្តល់ឱ្យត្រូវបានគេហៅថា កម្លាំងខាងក្រៅ (ជាធម្មតាកម្លាំងខាងក្រៅត្រូវបានតាងដោយអក្សរ F) ។
ពិចារណាពីអន្តរកម្មនៃសាកសពពីរនៅក្នុងប្រព័ន្ធបើកចំហមួយ។ ការផ្លាស់ប្តូរនៅក្នុងកម្លាំងនៃសាកសពទាំងនេះកើតឡើងទាំងនៅក្រោមសកម្មភាពនៃកម្លាំងខាងក្នុងនិងនៅក្រោមសកម្មភាពនៃកម្លាំងខាងក្រៅ។
យោងតាមច្បាប់ទី 2 របស់ញូវតុន ការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃសាកសពដែលកំពុងត្រូវបានពិចារណាសម្រាប់សាកសពទីមួយ និងទីពីរគឺ
D p 1 \u003d f 1 t + F 1 t (3.5)
D p 2 \u003d f 2 t + F 2 t (3.6)
ដែល t គឺជាពេលវេលានៃសកម្មភាពនៃកម្លាំងខាងក្រៅ និងខាងក្នុង។
ការបន្ថែមកន្សោម (3.5) និង (3.6) ពាក្យតាមពាក្យ យើងរកឃើញថា
D (p 1 +p 2)=(f 1 +f 2)t +(F 1 +F 2)t (3.7)
នៅក្នុងរូបមន្តនេះ p \u003d p 1 + p 2 - សន្ទុះសរុបនៃប្រព័ន្ធ f 1 + f 2 \u003d 0 (ចាប់តាំងពីយោងទៅតាមច្បាប់ទីបីរបស់ញូវតុន (f 1 \u003d -f 2), F 1 + F 2 \u003d F គឺជាលទ្ធផលនៃកម្លាំងខាងក្រៅទាំងអស់ ដែលធ្វើសកម្មភាពលើតួនៃប្រព័ន្ធដែលបានផ្តល់ឱ្យ ដោយគិតពីអ្វីដែលបាននិយាយ រូបមន្ត (3.7) យកទម្រង់
Dp=Ft. (3.8)
ពី (3.8) វាត្រូវបានគេមើលឃើញថា សន្ទុះសរុបនៃប្រព័ន្ធផ្លាស់ប្តូរតែនៅក្រោមសកម្មភាពនៃកម្លាំងខាងក្រៅប៉ុណ្ណោះ។ប្រសិនបើប្រព័ន្ធត្រូវបានបិទ ពោលគឺ F=0 បន្ទាប់មក D p=0 ហើយជាលទ្ធផល p=const។ ដូច្នេះរូបមន្ត (3.4) គឺជាករណីពិសេសនៃរូបមន្ត (3.8) ដែលបង្ហាញនៅក្រោមលក្ខខណ្ឌអ្វីដែលសន្ទុះសរុបនៃប្រព័ន្ធត្រូវបានរក្សាទុក ហើយនៅក្រោមលក្ខខណ្ឌអ្វីដែលវាផ្លាស់ប្តូរ។
ការរុញច្រានយន្តហោះ។
សារៈសំខាន់នៃការងាររបស់ Tsiolkovsky សម្រាប់អវកាសយានិក
ចលនានៃរាងកាយដែលកើតឡើងជាលទ្ធផលនៃការបំបែកផ្នែកនៃម៉ាស់របស់វាពីវាក្នុងល្បឿនជាក់លាក់មួយត្រូវបានគេហៅថា ប្រតិកម្ម.
ចលនាគ្រប់ប្រភេទ លើកលែងតែមានប្រតិកម្ម គឺមិនអាចទៅរួចទេបើគ្មានវត្តមានរបស់កងកម្លាំងខាងក្រៅនៃប្រព័ន្ធដែលបានផ្តល់ឱ្យ ពោលគឺ ដោយគ្មានអន្តរកម្មនៃតួនៃប្រព័ន្ធនេះជាមួយបរិស្ថាន និង សម្រាប់ការអនុវត្តនៃការរុញច្រានយន្តហោះ អន្តរកម្មនៃរាងកាយជាមួយបរិស្ថានមិនត្រូវបានទាមទារទេ។ដំបូង ប្រព័ន្ធគឺនៅសម្រាក ពោលគឺសន្ទុះសរុបរបស់វាគឺសូន្យ។ នៅពេលដែលផ្នែកមួយនៃម៉ាស់របស់វាចាប់ផ្តើមត្រូវបានច្រានចេញពីប្រព័ន្ធក្នុងល្បឿនជាក់លាក់មួយ បន្ទាប់មក (ចាប់តាំងពីសន្ទុះសរុបនៃប្រព័ន្ធបិទមួយ យោងទៅតាមច្បាប់នៃការអភិរក្សនៃសន្ទុះត្រូវតែនៅតែមិនផ្លាស់ប្តូរ) ប្រព័ន្ធទទួលបានល្បឿនដែលដឹកនាំនៅក្នុង ទិសដៅផ្ទុយ។ ជាការពិតណាស់ចាប់តាំងពី m 1 v 1 + m 2 v 2 \u003d 0 បន្ទាប់មក m 1 v 1 \u003d -m 2 v 2, i.e.
v 2 \u003d -v 1 ម 1 / ម 2 ។
វាធ្វើតាមរូបមន្តនេះដែលល្បឿន v 2 ដែលទទួលបានដោយប្រព័ន្ធដែលមានម៉ាស់ m 2 អាស្រ័យលើម៉ាស់ដែលបានច្រាន m 1 និងល្បឿន v 1 នៃការច្រានចេញរបស់វា។
ម៉ាស៊ីនកំដៅដែលកម្លាំងរុញច្រានដែលកើតចេញពីប្រតិកម្មនៃយន្តហោះប្រតិកម្មនៃឧស្ម័នក្តៅដែលបានបញ្ចេញត្រូវបានអនុវត្តដោយផ្ទាល់ទៅរាងកាយរបស់វាត្រូវបានគេហៅថាម៉ាស៊ីនយន្តហោះ។ មិនដូចយានជំនិះដទៃទៀត ឧបករណ៍ដែលប្រើដោយយន្តហោះអាចផ្លាស់ទីឆ្លងកាត់អវកាសខាងក្រៅ។
ស្ថាបនិកទ្រឹស្តីនៃការហោះហើរក្នុងលំហគឺជាអ្នកវិទ្យាសាស្ត្ររុស្ស៊ីដ៏ឆ្នើម Tsiolkovsky (1857 - 1935) ។ គាត់បានផ្តល់មូលដ្ឋានគ្រឹះទូទៅនៃទ្រឹស្តីនៃការជំរុញយន្តហោះ បង្កើតគោលការណ៍ និងគ្រោងការណ៍ជាមូលដ្ឋាននៃយន្តហោះប្រតិកម្ម និងបានបង្ហាញពីភាពចាំបាច់នៃការប្រើប្រាស់រ៉ុក្កែតពហុដំណាក់កាលសម្រាប់ការហោះហើរអន្តរភព។ គំនិតរបស់ Tsiolkovsky ត្រូវបានអនុវត្តដោយជោគជ័យនៅសហភាពសូវៀតក្នុងការសាងសង់ផ្កាយរណបផែនដីសិប្បនិម្មិតនិងយានអវកាស។
ស្ថាបនិកនៃអវកាសយានិកជាក់ស្តែងគឺអ្នកវិទ្យាសាស្ត្រសូវៀត Academician Korolev (1906 - 1966) ។ ក្រោមការដឹកនាំរបស់គាត់ ផ្កាយរណបសិប្បនិមិត្តដំបូងបង្អស់របស់ពិភពលោកត្រូវបានបង្កើតឡើង និងបាញ់បង្ហោះ ការហោះហើរអវកាសដំបូងបង្អស់ក្នុងប្រវត្តិសាស្ត្រមនុស្សជាតិបានកើតឡើង។ អវកាសយានិកទីមួយនៃផែនដីគឺបុរសសូវៀត Yu.A. Gagarin (1934 - 1968) ។
សំណួរសម្រាប់ការគ្រប់គ្រងខ្លួនឯង៖
- តើច្បាប់ទី 2 របស់ញូវតុនត្រូវបានសរសេរក្នុងទម្រង់បំផុសគំនិតដោយរបៀបណា?
- ដូចម្តេចដែលហៅថា កម្លាំងរុញច្រាន? សន្ទុះរាងកាយ?
- តើប្រព័ន្ធសាកសពអ្វីទៅដែលហៅថាបិទ?
- ដូចម្តេចដែលហៅថាកម្លាំងផ្ទៃក្នុង?
- ដោយប្រើឧទាហរណ៍នៃអន្តរកម្មនៃសាកសពពីរនៅក្នុងប្រព័ន្ធបិទមួយបង្ហាញពីរបៀបដែលច្បាប់នៃការអភិរក្សនៃសន្ទុះត្រូវបានបង្កើតឡើង។ តើវាត្រូវបានបង្កើតឡើងយ៉ាងដូចម្តេច?
- តើអ្វីជាសន្ទុះសរុបនៃប្រព័ន្ធមួយ?
- តើកម្លាំងផ្ទៃក្នុងអាចផ្លាស់ប្តូរសន្ទុះសរុបនៃប្រព័ន្ធបានទេ?
- តើប្រព័ន្ធរាងកាយអ្វីទៅដែលហៅថាបើកចំហ?
- ដូចម្តេចដែលហៅថាកម្លាំងខាងក្រៅ?
- បង្កើតរូបមន្តដែលបង្ហាញនៅក្រោមលក្ខខណ្ឌអ្វីដែលសន្ទុះសរុបនៃការផ្លាស់ប្តូរប្រព័ន្ធ និងក្រោមលក្ខខណ្ឌអ្វីដែលវាត្រូវបានបម្រុងទុក។
- តើចលនាប្រតិកម្មគឺជាអ្វី?
- តើវាអាចកើតឡើងដោយគ្មានអន្តរកម្មនៃរាងកាយផ្លាស់ទីជាមួយបរិស្ថានទេ?
- តើអ្វីជាច្បាប់នៃការជំរុញយន្តហោះ?
- តើអ្វីទៅជាសារៈសំខាន់នៃការងាររបស់ Tsiolkovsky សម្រាប់អវកាសយានិក?
ប្រសិនបើនៅលើតួនៃម៉ាស់ m សម្រាប់រយៈពេលជាក់លាក់មួយ Δ t កម្លាំង F → ធ្វើសកម្មភាព បន្ទាប់មកការផ្លាស់ប្តូរល្បឿននៃរាងកាយ ∆ v → = v 2 → - v 1 → ដូចខាងក្រោម។ យើងទទួលបានវាក្នុងអំឡុងពេល Δ t រាងកាយបន្តផ្លាស់ទីដោយបង្កើនល្បឿន៖
a → = ∆ v → ∆ t = v 2 → - v 1 → ∆ t ។
ដោយផ្អែកលើច្បាប់មូលដ្ឋាននៃឌីណាមិក នោះគឺជាច្បាប់ទីពីររបស់ញូតុន យើងមាន៖
F → = m a → = m v 2 → - v 1 → ∆ t ឬ F → ∆ t = m v 2 → - m v 1 → = m ∆ v → = ∆ m v → ។
និយមន័យ ១សន្ទុះរាងកាយ, ឬ បរិមាណនៃចលនាគឺជាបរិមាណរាងកាយស្មើនឹងផលិតផលនៃម៉ាសនៃរាងកាយ និងល្បឿននៃចលនារបស់វា។
សន្ទុះនៃរាងកាយត្រូវបានចាត់ទុកថាជាបរិមាណវ៉ិចទ័រ ដែលត្រូវបានវាស់ជាគីឡូក្រាម-ម៉ែត្រក្នុងមួយវិនាទី (k g m / s) ។
និយមន័យ ២
កម្លាំងរុញច្រានគឺជាបរិមាណរូបវន្តស្មើនឹងផលិតផលនៃកម្លាំង និងពេលវេលានៃសកម្មភាពរបស់វា។
សន្ទុះត្រូវបានគេហៅថាបរិមាណវ៉ិចទ័រ។ មានទម្រង់និយមន័យមួយទៀត។
និយមន័យ ៣
ការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃរាងកាយគឺស្មើនឹងសន្ទុះនៃកម្លាំង។
ជាមួយនឹងសន្ទុះដែលតំណាងឱ្យ p → ច្បាប់ទីពីររបស់ញូតុនត្រូវបានសរសេរជា:
F → ∆t = ∆p → .
ទម្រង់នេះអនុញ្ញាតឱ្យយើងបង្កើតច្បាប់ទីពីររបស់ញូតុន។ កម្លាំង F → គឺជាលទ្ធផលនៃកម្លាំងទាំងអស់ដែលធ្វើសកម្មភាពលើរាងកាយ។ សមភាពត្រូវបានសរសេរជាការព្យាករលើអ័ក្សកូអរដោនេនៃទិដ្ឋភាព៖
F x Δ t = Δ p x ; F y ∆t = ∆p y ; Fz ∆t = ∆pz ។
រូបភាពទី 1 ។ ១៦. ១. គំរូសន្ទុះរាងកាយ។
ការផ្លាស់ប្តូរនៃការព្យាករនៃសន្ទុះរាងកាយនៅលើអ័ក្សកាត់កែងគ្នាទាំងបីគឺស្មើនឹងការព្យាករនៃកម្លាំងរុញច្រាននៅលើអ័ក្សដូចគ្នា។
និយមន័យ ៤
ចលនាមួយវិមាត្រគឺជាចលនានៃរាងកាយមួយតាមអ័ក្សកូអរដោនេ។
ឧទាហរណ៍ ១
ជាឧទាហរណ៍ សូមពិចារណាពីការធ្លាក់ដោយឥតគិតថ្លៃនៃរាងកាយជាមួយនឹងល្បឿនដំបូង v 0 ក្រោមសកម្មភាពនៃទំនាញក្នុងរយៈពេលមួយ t ។ នៅពេលដែលទិសដៅនៃអ័ក្ស O Y បញ្ឈរចុះក្រោម សន្ទុះនៃទំនាញ F t \u003d mg ដែលធ្វើសកម្មភាពក្នុងពេលវេលា t ស្មើនឹង m g t. ការជំរុញបែបនេះគឺស្មើនឹងការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃរាងកាយ៖
F t t \u003d m g t \u003d Δ p \u003d m (v - v 0), ពេលណា v \u003d v 0 + g t ។
ធាតុនេះស្របគ្នានឹងរូបមន្ត kinematic សម្រាប់កំណត់ល្បឿននៃចលនាដែលបង្កើនល្បឿនស្មើគ្នា។ ម៉ូឌុលនៃកម្លាំងមិនផ្លាស់ប្តូរពីចន្លោះពេលទាំងមូល t ។ នៅពេលដែលវាប្រែប្រួលក្នុងទំហំ នោះរូបមន្តសន្ទុះទាមទារការជំនួសតម្លៃមធ្យមនៃកម្លាំង F ជាមួយ p ពីចន្លោះពេល t ។ រូបភាពទី 1 ។ ១៦. 2 បង្ហាញពីរបៀបដែលសន្ទុះនៃកម្លាំងដែលអាស្រ័យលើពេលវេលាត្រូវបានកំណត់។

រូបភាពទី 1 ។ ១៦. ២. ការគណនានៃកម្លាំងរុញច្រានពីគ្រោងនៃ F (t)
វាចាំបាច់ក្នុងការជ្រើសរើសចន្លោះពេល Δ t នៅលើអ័ក្សពេលវេលាវាច្បាស់ណាស់ថាកម្លាំង F(t)អនុវត្តមិនផ្លាស់ប្តូរ។ បង្ខំ Impulse F (t) Δ t សម្រាប់រយៈពេល Δ t នឹងស្មើនឹងផ្ទៃនៃតួលេខដែលមានស្រមោល។ នៅពេលបែងចែកអ័ក្សពេលវេលាទៅជាចន្លោះពេលដោយ Δ t i នៅលើចន្លោះពេលពី 0 ដល់ t បន្ថែមកម្លាំងនៃកម្លាំងសម្ដែងទាំងអស់ពីចន្លោះពេលទាំងនេះ Δ t i , បន្ទាប់មកកម្លាំងរុញច្រានសរុបនឹងស្មើនឹងផ្ទៃនៃការបង្កើតដោយប្រើអ័ក្សបោះជំហាន និងពេលវេលា។
អនុវត្តដែនកំណត់ (Δ t i → 0) អ្នកអាចរកឃើញតំបន់ដែលនឹងត្រូវកំណត់ដោយក្រាហ្វ F(t)និងអ័ក្ស t ។ ការប្រើប្រាស់និយមន័យនៃកម្លាំងរុញច្រានពីកាលវិភាគគឺអាចអនុវត្តបានជាមួយនឹងច្បាប់ណាមួយដែលមានការផ្លាស់ប្តូរកម្លាំង និងពេលវេលា។ ដំណោះស្រាយនេះនាំទៅដល់ការរួមបញ្ចូលមុខងារ F(t)ពីចន្លោះពេល [ 0 ; t] ។
រូបភាពទី 1 ។ ១៦. 2 បង្ហាញពីកម្លាំងរុញច្រានដែលស្ថិតនៅក្នុងចន្លោះពេលពី t 1 = 0 s ទៅ t 2 = 10 ។
ពីរូបមន្តយើងទទួលបានថា F c p (t 2 - t 1) \u003d 1 2 F m a x (t 2 - t 1) \u003d 100 N s \u003d 100 គីឡូក្រាម m / s ។
នោះគឺឧទាហរណ៍បង្ហាញ F ជាមួយ p \u003d 1 2 F m a x \u003d 10 N ។
មានករណីជាច្រើននៅពេលដែលការកំណត់កម្លាំងជាមធ្យម F ជាមួយ p គឺអាចធ្វើទៅបានជាមួយនឹងពេលវេលា និងទិន្នន័យដែលបានដឹងនៅលើសន្ទុះដែលបានរាយការណ៍។ ជាមួយនឹងឥទ្ធិពលខ្លាំងលើបាល់ដែលមានម៉ាស 0.415 គីឡូក្រាមល្បឿនស្មើនឹង v \u003d 30 m / s អាចត្រូវបានគេរាយការណ៍។ ពេលវេលាប៉ះពាល់ប្រហាក់ប្រហែលគឺ ៨ ១០-៣ វិ។
បន្ទាប់មករូបមន្តសន្ទុះមានទម្រង់៖
p = m v = 12.5 គីឡូក្រាម g m / s ។
ដើម្បីកំណត់កម្លាំងមធ្យម F c p កំឡុងពេលមានផលប៉ះពាល់វាចាំបាច់ F c p = p ∆ t = 1.56 10 3 N ។
យើងទទួលបានតម្លៃដ៏ធំមួយ ដែលស្មើនឹងរាងកាយដែលមានទម្ងន់ 160 គីឡូក្រាម។
នៅពេលដែលចលនាកើតឡើងតាមបណ្តោយផ្លូវកោងបន្ទាប់មកតម្លៃដំបូង p 1 → និងចុងក្រោយ
p 2 → អាចមានភាពខុសប្លែកគ្នាក្នុងម៉ូឌុល និងក្នុងទិសដៅ។ ដើម្បីកំណត់សន្ទុះ ∆ p → ប្រើដ្យាក្រាមសន្ទុះ ដែលជាកន្លែងដែលមានវ៉ិចទ័រ p 1 → និង p 2 → , និង ∆ p → = p 2 → - p 1 → សាងសង់ដោយយោងទៅតាមក្បួនប្រលេឡូក្រាម។
ឧទាហរណ៍ ២
រូបភាពទី 1 ត្រូវបានបង្ហាញជាឧទាហរណ៍។ ១៦. 2 ដែលដ្យាក្រាមនៃកម្លាំងរុញច្រាននៃបាល់ដែលលោតចេញពីជញ្ជាំងត្រូវបានគូរ។ នៅពេលបម្រើ បាល់ដែលមានម៉ាស់ m ជាមួយនឹងល្បឿន v 1 → បុកផ្ទៃនៅមុំ α ទៅធម្មតា ហើយលោតចេញជាមួយនឹងល្បឿន v 2 → ជាមួយនឹងមុំ β ។ នៅពេលវាយជញ្ជាំង បាល់ត្រូវបានទទួលរងនូវកម្លាំង F → ដឹកនាំតាមរបៀបដូចគ្នានឹងវ៉ិចទ័រ ∆ p → ។

រូបភាពទី 1 ។ ១៦. ៣. បាល់លោតចេញពីជញ្ជាំងរដុប និងដ្យាក្រាមសន្ទុះ។
ប្រសិនបើមានការដួលរលំធម្មតានៃបាល់ដែលមានម៉ាស់ m លើផ្ទៃយឺតដែលមានល្បឿន v 1 → = v → នោះនៅពេលស្ទុះមកវិញវានឹងប្តូរទៅ v 2 → = - v → ។ នេះមានន័យថាសម្រាប់រយៈពេលជាក់លាក់មួយ សន្ទុះនឹងផ្លាស់ប្តូរ ហើយនឹងស្មើនឹង ∆ p → = - 2 m v → ។ ដោយប្រើការព្យាករលើ ОХ លទ្ធផលនឹងត្រូវបានសរសេរជា Δ p x = – 2 m v x ។ ពីគំនូរ 1 . 16 . 3 វាអាចត្រូវបានគេមើលឃើញថាអ័ក្ស ОХ ត្រូវបានដឹកនាំឆ្ងាយពីជញ្ជាំង បន្ទាប់មក v x< 0 и Δ p x >0. ពីរូបមន្តយើងទទួលបានថាម៉ូឌុល Δ p ត្រូវបានផ្សារភ្ជាប់ជាមួយនឹងម៉ូឌុលនៃល្បឿនដែលយកទម្រង់ Δ p = 2 m v ។
ប្រសិនបើអ្នកសម្គាល់ឃើញកំហុសនៅក្នុងអត្ថបទ សូមបន្លិចវា ហើយចុច Ctrl+Enter
ជីពចរ (បរិមាណនៃចលនា) គឺជាបរិមាណរូបវន្តវ៉ិចទ័រ ដែលជារង្វាស់នៃចលនាមេកានិចនៃរាងកាយ។ នៅក្នុងមេកានិចបុរាណ សន្ទុះនៃរាងកាយគឺស្មើនឹងផលិតផលនៃម៉ាស់ មរាងកាយនេះក្នុងល្បឿនរបស់វា។ vទិសដៅនៃសន្ទុះស្របគ្នានឹងទិសដៅនៃវ៉ិចទ័រល្បឿន៖
សន្ទុះប្រព័ន្ធភាគល្អិតគឺជាផលបូកវ៉ិចទ័រនៃ momenta នៃភាគល្អិតនីមួយៗរបស់វា៖ p=(ផលបូក) ភី, កន្លែងណា ភីគឺជាសន្ទុះនៃភាគល្អិត i-th ។
ទ្រឹស្តីបទស្តីពីការផ្លាស់ប្តូរសន្ទុះនៃប្រព័ន្ធ៖ សន្ទុះសរុបនៃប្រព័ន្ធអាចត្រូវបានផ្លាស់ប្តូរដោយសកម្មភាពនៃកម្លាំងខាងក្រៅតែប៉ុណ្ណោះ៖ Fext=dp/dt(1), i.e. ដេរីវេនៃពេលវេលានៃសន្ទុះនៃប្រព័ន្ធគឺស្មើនឹងផលបូកវ៉ិចទ័រនៃកម្លាំងខាងក្រៅទាំងអស់ដែលធ្វើសកម្មភាពលើភាគល្អិតនៃប្រព័ន្ធ។ ដូចនៅក្នុងករណីនៃភាគល្អិតតែមួយ វាធ្វើតាមការបញ្ចេញមតិ (1) ដែលការកើនឡើងនៃសន្ទុះនៃប្រព័ន្ធគឺស្មើនឹងសន្ទុះនៃលទ្ធផលនៃកម្លាំងខាងក្រៅទាំងអស់សម្រាប់រយៈពេលដែលត្រូវគ្នា៖
p2-p1= t & 0 F ext dt ។
នៅក្នុងមេកានិចបុរាណ, ពេញលេញ សន្ទុះប្រព័ន្ធនៃចំណុចសម្ភារៈត្រូវបានគេហៅថាបរិមាណវ៉ិចទ័រស្មើនឹងផលបូកនៃផលិតផលនៃម៉ាស់នៃចំណុចសម្ភារៈក្នុងល្បឿនរបស់ពួកគេ:
![]()
អាស្រ័យហេតុនេះ បរិមាណត្រូវបានគេហៅថាសន្ទុះនៃចំណុចសម្ភារៈមួយ។ វាគឺជាបរិមាណវ៉ិចទ័រដែលដឹកនាំក្នុងទិសដៅដូចគ្នាទៅនឹងល្បឿននៃភាគល្អិត។ ឯកតានៃសន្ទុះនៅក្នុងប្រព័ន្ធអន្តរជាតិនៃអង្គភាព (SI) គឺ គីឡូក្រាមម៉ែត្រក្នុងមួយវិនាទី(គីឡូក្រាម m/s) ។
ប្រសិនបើយើងកំពុងដោះស្រាយជាមួយនឹងតួនៃទំហំកំណត់ ដែលមិនមានចំណុចសម្ភារៈដាច់ពីគ្នា ដើម្បីកំណត់សន្ទុះរបស់វានោះ ចាំបាច់ត្រូវបំបែករូបកាយជាផ្នែកតូចៗ ដែលអាចចាត់ទុកថាជាចំណុចសម្ភារៈ និងបូកសរុបលើពួកវា។ លទ្ធផលយើងទទួលបាន៖
សន្ទុះនៃប្រព័ន្ធដែលមិនត្រូវបានប៉ះពាល់ដោយកម្លាំងខាងក្រៅណាមួយ (ឬពួកគេត្រូវបានផ្តល់សំណង) រក្សាទុកនៅក្នុងពេលវេលា៖
ការអភិរក្សនៃសន្ទុះក្នុងករណីនេះកើតឡើងពីច្បាប់ទី 2 និងទី 3 របស់ញូតុន៖ ដោយបានសរសេរច្បាប់ទីពីររបស់ញូតុនសម្រាប់ចំណុចនីមួយៗដែលបង្កើតជាប្រព័ន្ធ ហើយបូកសរុបវាលើចំណុចសម្ភារៈទាំងអស់ដែលបង្កើតជាប្រព័ន្ធ ដោយគុណធម៌ទីបីរបស់ញូតុន ច្បាប់យើងទទួលបានសមភាព (*)។
នៅក្នុងមេកានិចទំនាក់ទំនង សន្ទុះបីវិមាត្រនៃប្រព័ន្ធនៃចំណុចសម្ភារៈមិនអន្តរកម្មគឺជាបរិមាណ
 ,
,
កន្លែងណា ម៉ែ- ទម្ងន់ ខ្ញុំ- ចំណុចសម្ភារៈ។
សម្រាប់ប្រព័ន្ធបិទជិតនៃចំណុចសម្ភារៈដែលមិនមានអន្តរកម្ម តម្លៃនេះត្រូវបានរក្សាទុក។ ទោះជាយ៉ាងណាក៏ដោយ សន្ទុះបីវិមាត្រមិនមែនជាបរិមាណដែលទាក់ទងគ្នាដោយវិចារណញាណទេ ព្រោះវាអាស្រ័យលើស៊ុមនៃឯកសារយោង។ តម្លៃដែលមានន័យច្រើនជាងនេះនឹងក្លាយជាសន្ទុះបួនវិមាត្រ ដែលសម្រាប់ចំណុចសម្ភារៈមួយត្រូវបានកំណត់ថាជា

នៅក្នុងការអនុវត្ត ទំនាក់ទំនងខាងក្រោមរវាងម៉ាស សន្ទុះ និងថាមពលនៃភាគល្អិតមួយត្រូវបានគេប្រើជាញឹកញាប់៖
ជាគោលការណ៍ សម្រាប់ប្រព័ន្ធនៃចំណុចសម្ភារៈដែលមិនមានអន្តរកម្ម 4-momenta របស់ពួកគេត្រូវបានបូកសរុប។ ទោះជាយ៉ាងណាក៏ដោយ សម្រាប់អន្តរកម្មនៃភាគល្អិតនៅក្នុងមេកានិចដែលទាក់ទងគ្នា គួរតែគិតគូរពីសន្ទុះនៃភាគល្អិតដែលបង្កើតជាប្រព័ន្ធ មិនត្រឹមតែប៉ុណ្ណោះទេ ថែមទាំងសន្ទុះនៃអន្តរកម្មរវាងពួកវាផងដែរ។ ដូច្នេះ បរិមាណដ៏មានអត្ថន័យច្រើននៅក្នុងមេកានិចដែលទាក់ទងគ្នាគឺ តង់ស៊ីតេថាមពល ដែលបំពេញយ៉ាងពេញលេញនូវច្បាប់អភិរក្ស។
លក្ខណៈសម្បត្តិជីពចរ
· ការបន្ថែម។ទ្រព្យសម្បត្តិនេះមានន័យថាកម្លាំងរុញច្រាននៃប្រព័ន្ធមេកានិកដែលមានចំណុចសម្ភារៈគឺស្មើនឹងផលបូកនៃកម្លាំងរុញច្រាននៃចំណុចសម្ភារៈទាំងអស់ដែលបានរួមបញ្ចូលនៅក្នុងប្រព័ន្ធ។
· ភាពប្រែប្រួលទាក់ទងនឹងការបង្វិលនៃស៊ុមយោង។
· ការអភិរក្ស។សន្ទុះមិនផ្លាស់ប្តូរក្នុងអំឡុងពេលអន្តរកម្មដែលផ្លាស់ប្តូរតែលក្ខណៈមេកានិចនៃប្រព័ន្ធ។ ទ្រព្យសម្បត្តិនេះគឺមិនប្រែប្រួលទាក់ទងនឹងការបំប្លែងកាលីឡេ។ លក្ខណៈសម្បត្តិនៃការអភិរក្សថាមពលកលនទិក ការអភិរក្សសន្ទុះ និងច្បាប់ទីពីររបស់ញូតុនគឺគ្រប់គ្រាន់ដើម្បីទាញយករូបមន្តគណិតវិទ្យាសម្រាប់សន្ទុះ។
ច្បាប់នៃការអភិរក្សសន្ទុះ (ច្បាប់នៃការអភិរក្សសន្ទុះ)- ផលបូកវ៉ិចទ័រនៃកម្លាំងរុញច្រាននៃតួទាំងអស់នៃប្រព័ន្ធគឺជាតម្លៃថេរ ប្រសិនបើផលបូកវ៉ិចទ័រនៃកម្លាំងខាងក្រៅដែលធ្វើសកម្មភាពលើប្រព័ន្ធគឺស្មើនឹងសូន្យ។
នៅក្នុងមេកានិចបុរាណ ច្បាប់នៃការអភិរក្សនៃសន្ទុះជាធម្មតាត្រូវបានចេញជាលទ្ធផលនៃច្បាប់របស់ញូតុន។ ពីច្បាប់របស់ញូតុន វាអាចត្រូវបានបង្ហាញថា នៅពេលផ្លាស់ទីក្នុងចន្លោះទទេ សន្ទុះត្រូវបានអភិរក្សទាន់ពេល ហើយនៅក្នុងវត្តមាននៃអន្តរកម្ម អត្រានៃការផ្លាស់ប្តូររបស់វាត្រូវបានកំណត់ដោយផលបូកនៃកម្លាំងដែលបានអនុវត្ត។
ដូចច្បាប់អភិរក្សជាមូលដ្ឋានណាមួយដែរ ច្បាប់នៃការអភិរក្សនៃសន្ទុះត្រូវបានផ្សារភ្ជាប់ យោងទៅតាមទ្រឹស្តីបទ Noether ជាមួយនឹងស៊ីមេទ្រីជាមូលដ្ឋានមួយ - ភាពដូចគ្នានៃលំហ។
ការផ្លាស់ប្តូរសន្ទុះនៃរាងកាយគឺស្មើនឹងសន្ទុះនៃលទ្ធផលនៃកម្លាំងទាំងអស់ដែលធ្វើសកម្មភាពលើរាងកាយ។នេះជាទម្រង់ច្បាប់ទីពីររបស់ញូតុន។


