E სრული \u003d E kin + U
E kin \u003d mv 2 / 2 + Jw 2 / 2 - მთარგმნელობითი და ბრუნვის მოძრაობის კინეტიკური ენერგია,
U = mgh არის მ მასის სხეულის პოტენციური ენერგია დედამიწის ზედაპირიდან h სიმაღლეზე.
F tr \u003d kN - მოცურების ხახუნის ძალა, N - ნორმალური წნევის ძალა, k - ხახუნის კოეფიციენტი.
ცენტრალური ზემოქმედების შემთხვევაში, იმპულსის შენარჩუნების კანონი
ს p i= const იწერება პროექციებში კოორდინატთა ღერძებზე.
კუთხური იმპულსის შენარჩუნების კანონი და ბრუნვის მოძრაობის დინამიკის კანონი
ს ლ ი= const არის კუთხური იმპულსის შენარჩუნების კანონი,
L OS \u003d Jw - ღერძული კუთხოვანი იმპულსი,
L ორბი = [ rp] არის ორბიტალური კუთხოვანი იმპულსი,
dL/dt=SM ext - ბრუნვის მოძრაობის დინამიკის კანონი,
მ= [RF] = rFsina – ძალის მომენტი, F – ძალა, a – კუთხე რადიუს-ვექტორსა და ძალას შორის.
A \u003d òMdj - მუშაობა ბრუნვის დროს.
მექანიკის განყოფილება
კინემატიკა
Დავალება
Დავალება. სხეულის მიერ გავლილი გზის დროზე დამოკიდებულება მოცემულია განტოლებით s = A–Bt+Ct 2 . იპოვეთ სხეულის სიჩქარე და აჩქარება t დროს.
გადაწყვეტის მაგალითი
v \u003d ds / dt \u003d -B + 2Ct, a \u003d dv / dt \u003d ds 2 / dt 2 \u003d 2C.
Პარამეტრები
1.1. სხეულის მიერ გავლილი გზის დროზე დამოკიდებულება მოცემულია
განტოლება s \u003d A + Bt + Ct 2, სადაც A \u003d 3m, B \u003d 2 m / s, C \u003d 1 m / s 2.
იპოვეთ სიჩქარე მესამე წამში.
2.1. სხეულის მიერ გავლილი გზის დროზე დამოკიდებულება მოცემულია
განტოლება s \u003d A + Bt + Ct 2 + Dt 3, სადაც C \u003d 0.14m / s 2 და D \u003d 0.01 v / c 3.
მოძრაობის დაწყებიდან რამდენი ხნის შემდეგ ხდება სხეულის აჩქარება
ტოლი იქნება 1 მ/წმ 2.
3.1 ბორბალი, რომელიც ბრუნავს ერთნაირად აჩქარებულად, მიაღწია კუთხურ სიჩქარეს
20 რადი/წმ N = 10 ბრუნი მოძრაობის დაწყების შემდეგ. იპოვე
ბორბლის კუთხოვანი აჩქარება.
4.1 0.1 მ რადიუსის მქონე ბორბალი ბრუნავს ისე, რომ კუთხის დამოკიდებულება
j \u003d A + Bt + Ct 3, სადაც B \u003d 2 რად / წმ და C \u003d 1 რად / წმ 3. ტყუილის წერტილებისთვის
ბორბლის რგოლზე, იპოვეთ მოძრაობის დაწყებიდან 2 წამის შემდეგ:
1) კუთხური სიჩქარე, 2) წრფივი სიჩქარე, 3) კუთხოვანი
აჩქარება, 4) ტანგენციალური აჩქარება.
5.1 5 სმ რადიუსის მქონე ბორბალი ბრუნავს ისე, რომ კუთხის დამოკიდებულება
ბორბლის რადიუსის როტაცია დროის მიმართ მოცემულია განტოლებით
j \u003d A + Bt + Ct 2 + Dt 3, სადაც D \u003d 1 რად / წ 3. იპოვეთ ტყუილი ქულები
ბორბლის რგოლზე, ტანგენციალური აჩქარების ცვლილება
მოძრაობის ყოველი წამი.
6.1 10 სმ რადიუსის მქონე ბორბალი ბრუნავს ისე, რომ დამოკიდებულება
ბორბლის რგოლზე მდებარე წერტილების წრფივი სიჩქარე, საწყისი
დრო მოცემულია განტოლებით v \u003d At + Bt 2, სადაც A \u003d 3 სმ / წმ 2 და
B \u003d 1 სმ / წმ 3. იპოვეთ სრულის ვექტორის მიერ წარმოქმნილი კუთხე
აჩქარება ბორბლის რადიუსით t = 5 წამის შემდეგ
მოძრაობის დაწყება.
7.1 ბორბალი ბრუნავს ისე, რომ რადიუსის ბრუნვის კუთხის დამოკიდებულება
ბორბალი დროის მიმართ მოცემულია განტოლებით j =A +Bt +Ct 2 +Dt 3 , სადაც
B \u003d 1 რად / წმ, C \u003d 1 რად / წმ 2, D \u003d 1 რად / წმ 3. იპოვნეთ ბორბლის რადიუსი,
თუ ცნობილია, რომ მოძრაობის მეორე წამის ბოლომდე
ბორბლის რგოლზე მდებარე წერტილების ნორმალური აჩქარება არის
და n \u003d 346 მ/წმ 2.
8.1 მატერიალური წერტილის რადიუსის ვექტორი დროთა განმავლობაში იცვლება შესაბამისად
კანონი რ= t 3 მე+ t2 ჯ.განსაზღვრეთ t = 1 წმ დროის მომენტი:
სიჩქარის მოდული და აჩქარების მოდული.
9.1 მატერიალური წერტილის რადიუსის ვექტორი დროთა განმავლობაში იცვლება შესაბამისად
კანონი რ=4ტ2 მე+ 3 ტ ჯ+2რომ.დაწერეთ გამონათქვამი ვექტორისთვის
სიჩქარე და აჩქარება. განსაზღვრეთ დრო t = 2 წმ
სიჩქარის მოდული.
10.1 წერტილი მოძრაობს xy სიბრტყეში კოორდინატების მქონე პოზიციიდან
x 1 = y 1 = 0 სიჩქარით ვ= ა მე+Bx ჯ. განტოლების განსაზღვრა
y(x) წერტილის ტრაექტორია და ტრაექტორიის ფორმა.
Ინერციის მომენტი
მანძილი L/3 ღეროს დასაწყისიდან.
გადაწყვეტის მაგალითი.
M - ღეროს მასა J = J st + J გრ
L - ღეროს სიგრძე J st1 \u003d mL 2 / 12 - ღეროს ინერციის მომენტი
2 მ არის წონის წონა მის ცენტრთან შედარებით. თეორემით
შტაინერმა იპოვა ინერციის მომენტი
J=? ღერო o-ღერძთან შედარებით, ცენტრიდან დაშორებული მანძილით a = L/2 - L/3 = L/6.
J st \u003d mL 2 / 12 + m (L / 6) 2 \u003d mL 2 / 9.
სუპერპოზიციის პრინციპის მიხედვით
J \u003d მლ 2 / 9 + 2 მ (2ლ / 3) 2 \u003d მლ 2.
Პარამეტრები
1.2. განვსაზღვროთ 2მ მასის ღეროს ინერციის მომენტი ღერძის მიმართ, რომელიც დაშორებულია ღერძის დასაწყისიდან L/4 მანძილით. ღეროს ბოლოს კონცენტრირებული მასა მ.
2.2 განსაზღვრეთ ღეროს ინერციის მომენტი m მასის მიმართ
ღერძი დაშორებულია ღეროს დასაწყისიდან L/5 მანძილზე. Ბოლოს
ღერო კონცენტრირებული მასა 2მ.
3.2. დაადგინეთ 2მ მასის ღეროს ინერციის მომენტი ღერძის მიმართ, რომელიც დაშორებულია ღეროს დასაწყისიდან L/6 მანძილით. ღეროს ბოლოს კონცენტრირებული მასა მ.
4.2. დაადგინეთ 3მ მასის ღეროს ინერციის მომენტი ღერძის მიმართ, რომელიც დაშორებულია ღეროს დასაწყისიდან L/8 მანძილით. ღეროს ბოლოში კონცენტრირებული მასა არის 2მ.
5.2. განსაზღვრეთ 2მ მასის ღეროს ინერციის მომენტი ღერძის მიმართ, რომელიც გადის ღერძის დასაწყისში. კონცენტრირებული მასები m მიმაგრებულია ღეროს ბოლოსა და შუაზე.
6.2. განსაზღვრეთ 2მ მასის ღეროს ინერციის მომენტი ღერძის მიმართ, რომელიც გადის ღერძის დასაწყისში. ღეროს ბოლოზე მიმაგრებულია კონცენტრირებული მასა 2მ, შუაზე კი კონცენტრირებული 2მ.
7.2. განვსაზღვროთ m მასის მქონე ღეროს ინერციის მომენტი ღერძის მიმართ, რომელიც არის L/4 ღეროს დასაწყისიდან. კონცენტრირებული მასები m მიმაგრებულია ღეროს ბოლოსა და შუაზე.
8.2. იპოვეთ m და r რადიუსის თხელი ერთგვაროვანი რგოლის ინერციის მომენტი ღერძის მიმართ, რომელიც მდებარეობს რგოლის სიბრტყეში და დაშორებულია ცენტრიდან r/2-ით.
9.2. იპოვეთ m და r რადიუსის თხელი ერთგვაროვანი დისკის ინერციის მომენტი ღერძის მიმართ, რომელიც მდებარეობს დისკის სიბრტყეში და დაშორებულია ცენტრიდან r/2-ით.
10.2. იპოვეთ m და რადიუსის მასის ერთგვაროვანი ბურთის ინერციის მომენტი
r მისი ცენტრიდან r/2-ით დაშორებულ ღერძთან შედარებით.
ტომსკი: TUSUR, 2012.- 136გვ.
ეს სახელმძღვანელო შეიცავს 13 თავს მექანიკის ძირითად განყოფილებებზე, რომლებიც გათვალისწინებულია ფიზიკური აღზრდის ძირითადი სტანდარტით უნივერსიტეტების ტექნიკური სპეციალობების სტუდენტებისთვის. თავდაპირველ მეთოდოლოგიურ დონეზე სახელმძღვანელოში ასახულია მექანიკის საკოორდინატო მეთოდისა და ვექტორული კონცეპტუალური აპარატის საფუძვლები, ხისტი სხეულის მთარგმნელობითი და ბრუნვის მოძრაობის კინემატიკისა და დინამიკის საფუძვლები, ენერგიის შენარჩუნების კანონები და მექანიკური იმპულსი. სისტემები; თხევადი და ელასტიური მყარი ნივთიერების მექანიკა, ციური სხეულების მიზიდულობისა და მოძრაობის კლასიკური თეორია, ჰარმონიული რხევების ძირითადი თვისებები, ფარდობითობის განსაკუთრებული ფიზიკური საფუძვლები. ეს სახელმძღვანელო ფიზიკის შესახებ წარმოდგენილია ყველაზე ლაკონური, მაგრამ საკმაოდ ინფორმაციული ენით. ზოგადად, ეს სახელმძღვანელო, როგორც ჩანს, სასარგებლოა არა მხოლოდ პირველი კურსის სტუდენტებისთვის, არამედ ტექნიკური უნივერსიტეტების ყველა კურსდამთავრებულებისთვის. ფიზიკის მასწავლებლები ასევე იპოვიან ახალ მიდგომებს ზოგიერთი განყოფილების პრეზენტაციაში.
ფორმატი: pdf
Ზომა: 1.7 მბ
უყურეთ, გადმოწერეთ:Yandex.disk
ᲡᲐᲠᲩᲔᲕᲘ
შესავალი 6
1 კოორდინაციის მეთოდი. ვექტორები 9
1.1 პირველადი ფიზიკური ტერმინების განმარტებები 9
1.2 კოორდინატთა სისტემა 10
1.3 სიჩქარე და აჩქარება 11
1.4 კოორდინატის ცვლილება, როგორც სიჩქარის ინტეგრალი 12
1.5 განზოგადება სამგანზომილებიანი მოძრაობის შემთხვევისთვის 13
1.6 ვექტორები 14
1.7 ვექტორული ალგებრა 16
2 მატერიალური წერტილის კინემატიკა 19
2.1 მრუდი სიჩქარე და აჩქარება 19
2.2 ჯვარედინი პროდუქტი 21
2.3 ბრუნვის მოძრაობის კინემატიკა 24
2.4 ჰორიზონტალური კუთხით დაყრილი სხეულის მოძრაობა 26
მოძრაობის 3 კანონი 29
3.1 ძალის ცნება 29
3.2 ნიუტონის მეორე კანონი. წონა 30
3.3 ნიუტონის მესამე კანონი 31
3.4 მითითების ინერციული ჩარჩოები 33
3.5 ათვლის არაინერციული ჩარჩოები 34
3.6 გალილეოს ფარდობითობის პრინციპი 35
3.7 სხვადასხვა ძალების მაგალითები 36
4 იმპულსი და ენერგია 40
4.1 გაფართოებული სხეულის ინერციის ცენტრი (მასის ცენტრი) 40
4.2 მარტივი სხეულების მასის ცენტრის პოზიციის განსაზღვრა 42
4.3 სხეულის იმპულსი 43
4.4 მექანიკური მუშაობა და კინეტიკური ენერგია 44
4.5 კონსერვატიული ძალები 46
4.6 პოტენციური ენერგია. გრადიენტი 47
4.7 მექანიკური ენერგიის შენარჩუნების კანონი 49
5 ორი ნაწილაკების შეჯახება 51
5.1 მექანიკური სისტემის შიდა ენერგია 51
5.2 ორმაგი შეჯახების კლასიფიკაცია 52
5.3 აბსოლუტურად ელასტიური ცენტრალური (ფრონტალური) დარტყმა 53
5.4 აბსოლუტურად არაელასტიური ზემოქმედება 54
5.5 შეჯახება C-სისტემაში 55
5.6 აბსოლუტურად ელასტიური არაცენტრალური ზემოქმედება 55
6 სითხის მექანიკა 58
6.1 პასკალის კანონი 58
6.2 ჰიდროსტატიკური წნევა. არქიმედეს სიძლიერე 59
6.3 იდეალური სითხის სტაციონარული ნაკადი 60
6.4 ბერნულის განტოლების 62 გამოყენების მაგალითები
6.5 ბლანტი ხახუნი 64
6.6 ბლანტი სითხის გადინება მილში 65
6.7 ტურბულენტური დინება. რეინოლდსის ნომერი 66
6.8 წინააღმდეგობის ძალები, როდესაც სხეულები მოძრაობენ ბლანტი სითხეში 67
7 მყარი ნივთიერებების დრეკადობის თვისებები 69
7.1 სტრესი და დაძაბულობა 69
7.2 ჰუკის კანონი. იანგის მოდული და პუასონის თანაფარდობა 71
7.3 გარემოს ელასტიური დეფორმაციის ენერგია 72
7.4 ყოვლისმომცველი შეკუმშვა 72
7.5 ფიქსირებული ზოლის კომპრესიული დეფორმაცია 73
7.6 მყარი ნივთიერებების თერმული დეფორმაცია 74
7.7 ათვლის დეფორმაცია 75
8 ხისტი სხეულის დინამიკა 78
8.1 ხისტი სხეულის ინერციის მომენტი 78
8.2 ზოგიერთი მარტივი სხეულების ინერციის მომენტები 79
8.3 ძალის მომენტი 81
8.4 კუთხური ბრუნვა 82
8.5 ბრუნვის დინამიკა 83
8.6 მრგვალი სხეულის გადახვევა დახრილ სიბრტყეში 84
9 ხისტი სხეულების 3D ბრუნვა 87
9.1 ხისტი სხეულის ინერციის მომენტის ტენსორი 87
9.2 ასიმეტრიული სხეულის ენერგია და კუთხოვანი იმპულსი 89
9.3 გიროსკოპი 89
9.4 ცენტრიფუგა და კორიოლის ძალები 91
10 გრავიტაცია 94
10.1 ნიუტონის მიზიდულობის კანონი 94
10.2 გრავიტაცია გაფართოებულ სხეულებთან 96
10.3 მოქცევის ძალები 98
10.4 კეპლერის პრობლემა 99
10.5 ელიფსური ორბიტების პარამეტრები 101
10.6 ციური სხეულის ტრაექტორიის გამოთვლის ალგორითმი 103
11 ჰარმონია 104
11.1 მცირე ვიბრაციები 104
11.2 ვიბრაციული მოძრაობის ენერგია 106
11.3 ერთგანზომილებიანი რხევების დამატება. სცემს 106
11.4 ორმხრივი პერპენდიკულარული ვიბრაციების დამატება 107
11.5 შეწყვილებული ქანქარების რხევები 108
12 ფარდობითობის პრინციპი 112
12.1 სინათლის სიჩქარე და აინშტაინის პოსტულატი 112
12.2 ლორენცის გარდაქმნები 114
12.3 ლორენცის გარდაქმნების შედეგები 116
12.3.1 ერთდროულობის ფარდობითობა 116
12.3.2 სეგმენტის სიგრძის ფარდობითობა 117
12.3.3 მოვლენებს შორის დროის ინტერვალების ფარდობითობა. . 118
12.4 სიჩქარის დამატება 119
12.5 სინათლის აბერაცია 120
13 რელატივისტური დინამიკა 122
13.1 რელატივისტური იმპულსი 122
13.2 რელატივისტური ნაწილაკების ენერგია 123
13.3 ჯამური ენერგიის შენარჩუნების კანონი 124
13.4 ორი რელატივისტური ნაწილაკების არაელასტიური შეჯახება 126
13.5 ოთხგანზომილებიანი სივრცე-დრო 127
13.6 4-ვექტორის წერტილოვანი ნამრავლი 129
13.7 ოპტიკური დოპლერის ეფექტი 131
დასკვნა 134
ლიტერატურა 135
ეს სახელმძღვანელო შეიცავს 13 თავს მექანიკის ძირითად განყოფილებებზე, რომლებიც გათვალისწინებულია ფიზიკური აღზრდის ძირითადი სტანდარტით უნივერსიტეტების ტექნიკური სპეციალობების სტუდენტებისთვის.
თავდაპირველ მეთოდოლოგიურ დონეზე სახელმძღვანელოში მოცემულია მექანიკის საკოორდინატო მეთოდისა და ვექტორული კონცეპტუალური აპარატის საფუძვლები, ხისტი სხეულის მთარგმნელობითი და ბრუნვის მოძრაობის კინემატიკისა და დინამიკის საფუძვლები, მექანიკური სისტემების ენერგიისა და იმპულსის შენარჩუნების კანონები. , სითხეებისა და ელასტიური მყარი ნივთიერებების მექანიკა, ციური სხეულების მიზიდულობისა და მოძრაობის კლასიკური თეორია, ჰარმონიული რხევების ძირითადი თვისებები, ფარდობითობის სპეციალური თეორიის ფიზიკური საფუძვლები.
თავების შინაარსი წარმოადგენს მასალის თანმიმდევრულ და თანმიმდევრულ პრეზენტაციას, რომელშიც განსაკუთრებით ხაზგასმულია ყველაზე მნიშვნელოვანი ელემენტები: ახალი ტერმინების განმარტებები, დებულებები, რომლებსაც აქვთ თეორემების ძალა, ფაქტები ან დებულებები, რომლებიც საჭიროებენ მკითხველის განსაკუთრებულ ყურადღებას. ყოველი თავის ბოლოს მოცემულია საკონტროლო კითხვების სია, რომლებზეც მკითხველმა უნდა შეძლოს პასუხის გაცემა კოლოკვიუმის ან მასწავლებელთან საუბრის დროს.
ფორმულებში და ტექსტში ყველა ვექტორული რაოდენობა მითითებულია თამამად, მაგალითად, სიჩქარის ვექტორი v. ვექტორების სკალარული ნამრავლი აღინიშნება ფაქტორების ვექტორებს შორის წერტილით - Fv, ხოლო ვექტორული ნამრავლი ჯვარედინით - g xp. მათემატიკური ფორმულების ფრჩხილები გამოიყენება მხოლოდ მათემატიკური ოპერაციების სტანდარტული დაჯგუფებისა და ფუნქციის არგუმენტების აღსანიშნავად.
ეს სახელმძღვანელო ფიზიკის შესახებ წარმოდგენილია ყველაზე ლაკონური, მაგრამ საკმაოდ ინფორმაციული ენით. ზოგადად, ეს სახელმძღვანელო, როგორც ჩანს, სასარგებლოა არა მხოლოდ პირველი კურსის სტუდენტებისთვის, არამედ ტექნიკური უნივერსიტეტების ყველა კურსდამთავრებულებისთვის. ფიზიკის მასწავლებლები ასევე იპოვიან ახალ მიდგომებს ზოგიერთი განყოფილების პრეზენტაციაში.
ენერგია და იმპულსი ფიზიკაში ყველაზე მნიშვნელოვანი ცნებებია. გამოდის, რომ კონსერვაციის კანონები მნიშვნელოვან როლს თამაშობს ზოგადად ბუნებაში. შენახული რაოდენობებისა და კანონების ძიება, საიდანაც მათი მიღება შესაძლებელია, არის ფიზიკის მრავალი დარგის კვლევის საგანი. მოდით, ეს კანონები ყველაზე მარტივი გზით გამოვიტანოთ ნიუტონის მეორე კანონიდან.
იმპულსის შენარჩუნების კანონი.პულსი, ან მოძრაობის მოცულობაგვგანისაზღვრება, როგორც მასის პროდუქტი მმატერიალური წერტილი სიჩქარეზე ვ: გვ= მვ. ნიუტონის მეორე კანონი, რომელიც იყენებს იმპულსის განმარტებას, იწერება როგორც
= დგვ= ფ, (1.3.1)
აქ ფარის სხეულზე მიმართული ძალების შედეგი.
დახურული სისტემაეწოდება სისტემას, რომელშიც სხეულზე მოქმედი გარე ძალების ჯამი ნულის ტოლია:
ფ= å ფმე= 0 . (1.3.2)
მაშინ სხეულის იმპულსის ცვლილება დახურულ სისტემაში ნიუტონის მეორე კანონის მიხედვით (1.3.1), (1.3.2) არის
დგვ= 0 . (1.3.3)
ამ შემთხვევაში, ნაწილაკების სისტემის იმპულსი რჩება მუდმივი:
გვ= å გვმე= კონსტ. (1.3.4)
ეს გამოთქმა არის იმპულსის შენარჩუნების კანონი, რომელიც ჩამოყალიბებულია შემდეგნაირად: როდესაც სხეულზე ან სხეულთა სისტემაზე მოქმედი გარე ძალების ჯამი ნულის ტოლია, სხეულის ან სხეულთა სისტემის იმპულსი არის მუდმივი მნიშვნელობა.
ენერგიის შენარჩუნების კანონი.ყოველდღიურ ცხოვრებაში, "შრომის" კონცეფციით ჩვენ გვესმის ადამიანის ნებისმიერი სასარგებლო სამუშაო. ფიზიკაში შესწავლილია მექანიკური მუშაობა, რომელიც ხდება მხოლოდ მაშინ, როდესაც სხეული მოძრაობს ძალის მოქმედებით. მექანიკური სამუშაო ∆A განისაზღვრება, როგორც ძალის სკალარული ნამრავლი ფმიმართა სხეულზე და სხეულის გადაადგილება Δ რამ ძალის შედეგად:
ა ა= (ფ, Δ რ) = ფა რ cosα. (1.3.5)
ფორმულაში (1.3.5) მუშაობის ნიშანი განისაზღვრება cos α ნიშნით.
კაბინეტის გადატანის სურვილით ვაჭერთ მასზე ძალით, მაგრამ თუ ერთდროულად არ მოძრაობს, მაშინ არ ვასრულებთ მექანიკურ სამუშაოებს. შეიძლება წარმოვიდგინოთ შემთხვევა, როდესაც სხეული მოძრაობს ძალების მონაწილეობის გარეშე (ინერციით),
ამ შემთხვევაში არც მექანიკური სამუშაოები კეთდება. თუ სხეულთა სისტემას შეუძლია მუშაობა, მაშინ მას აქვს ენერგია.
ენერგია ერთ-ერთი ყველაზე მნიშვნელოვანი ცნებაა არა მხოლოდ მექანიკაში, არამედ ფიზიკის სხვა სფეროებშიც: თერმოდინამიკა და მოლეკულური ფიზიკა, ელექტროენერგია, ოპტიკა, ატომური, ბირთვული და ნაწილაკების ფიზიკა.
ნებისმიერ სისტემაში, რომელიც მიეკუთვნება ფიზიკურ სამყაროს, ენერგია ინახება ნებისმიერ პროცესში. მხოლოდ ფორმა, რომელშიც ის გადის, შეიძლება შეიცვალოს. მაგალითად, როდესაც ტყვია ხვდება აგურს, კინეტიკური ენერგიის ნაწილი (უფრო მეტიც, მეტი) გარდაიქმნება სითბოდ. ამის მიზეზია ტყვიასა და აგურს შორის ხახუნის ძალის არსებობა, რომელშიც ის დიდი ხახუნით მოძრაობს. როდესაც ტურბინის როტორი ბრუნავს, მექანიკური ენერგია გარდაიქმნება ელექტრულ ენერგიად და ამავდროულად, დენი ჩნდება დახურულ წრეში. ქიმიური საწვავის წვის დროს გამოთავისუფლებული ენერგია, ე.ი. მოლეკულური ბმების ენერგია გარდაიქმნება თერმულ ენერგიად. ქიმიური ენერგიის ბუნება არის ინტერმოლეკულური და ატომთაშორისი ბმების ენერგია, რომელიც არსებითად წარმოადგენს მოლეკულურ ან ატომურ ენერგიას.
ენერგია არის სკალარული სიდიდე, რომელიც ახასიათებს სხეულის მუშაობის უნარს:
E2-E1= ∆A. (1.3.6)
მექანიკური სამუშაოების შესრულებისას სხეულის ენერგია იცვლება ერთი ფორმიდან მეორეში. სხეულის ენერგია შეიძლება იყოს კინეტიკური ან პოტენციური ენერგიის სახით.
მექანიკური მოძრაობის ენერგია
ვნათესავი = .
დაურეკა კინეტიკური ენერგიასხეულის წინ მოძრაობა. SI ერთეულების სისტემაში მუშაობა და ენერგია იზომება ჯოულებში (J).
ენერგია შეიძლება განისაზღვროს არა მხოლოდ სხეულების მოძრაობით, არამედ მათი ურთიერთგანლაგებითა და ფორმით. ამ ენერგიას ე.წ პოტენციალი.
პოტენციურ ენერგიას ფლობს ერთმანეთთან შედარებით ორი დატვირთვა, რომლებიც დაკავშირებულია ზამბარით, ან დედამიწაზე გარკვეულ სიმაღლეზე მდებარე სხეულთან. ეს ბოლო მაგალითი ეხება გრავიტაციულ პოტენციურ ენერგიას, როდესაც სხეული დედამიწის ერთი სიმაღლიდან მეორეზე გადადის. იგი გამოითვლება ფორმულის მიხედვით
მექანიკური ენერგია.
იმპულსის დამოკიდებულება ორი სხეულის მოძრაობის სიჩქარეზე. რომელ სხეულს აქვს უფრო დიდი მასა და რამდენით? 1) სხეულების მასები ერთნაირია 2) 1 სხეულის მასა 3,5-ჯერ მეტია 3) 2 სხეულის მასა 3,5-ჯერ მეტია 4) გრაფიკების მიხედვით სხეულების მასების შედარება შეუძლებელია.
v სიჩქარით მოძრაობს, ის ეჯახება მოსვენებულ პლასტილინის ბურთულას 2 ტ. დარტყმის შემდეგ ბურთები ერთმანეთს ეწებება და ერთად მოძრაობს. რა არის მათი მოძრაობის სიჩქარე? 1) v/3 2) 2v/3 3) v/2 4) არ არის საკმარისი მონაცემები პასუხისთვის
ისინი მოძრაობენ სწორხაზოვანი სარკინიგზო ლიანდაგის გასწვრივ სიჩქარით, რომლის პროგნოზების დამოკიდებულება ლიანდაგის პარალელურ ღერძზე დროზე ნაჩვენებია ნახატზე. 20 წამის შემდეგ მანქანებს შორის მოხდა ავტომატური შეერთება. რა სიჩქარით და რა მიმართულებით წავა დაწყვილებული ვაგონები? 1) 1,4 მ/წმ, საწყისი მოძრაობისკენ 1. 2) 0,2 მ/წმ, საწყისი მოძრაობისკენ 1. 3) 1,4 მ/წმ, საწყისი მოძრაობისკენ 2. 4) 0,2 მ/წმ, საწყისი მოძრაობის მიმართულებით. 2.
მნიშვნელობა, რომელიც აჩვენებს, თუ რა სამუშაოს შესრულება შეუძლია სხეულს სრულყოფილი სამუშაო უდრის სხეულის ენერგიის ცვლილებას
განტოლების x: = 2 + 30 t - 2 t2, დაწერილი SI-ში. სხეულის წონა 5 კგ. რა არის სხეულის კინეტიკური ენერგია მოძრაობის დაწყებიდან 3 წამის შემდეგ? 1) 810 J 2) 1440 J 3) 3240 J 4) 4410 J
დეფორმირებული სხეული
ეს შესრულებულია სამუშაო 2 ჯ. რა სამუშაო უნდა გაკეთდეს ზამბარის გასაჭიმად კიდევ 4 სმ 1) 16 J 2) 4 J 3) 8 J 4) 2 J
დაადგინეთ კინეტიკური ენერგია Ek, რომელიც სხეულს აქვს ტრაექტორიის ზედა ნაწილში (იხ. სურათი)? 1) EK=mgH 2) EK=m(V0)2/2 + mgh-mgH 3) EK=mgH-mgh 4) EK=m(V0)2/2 + მგH
იგივე საწყისი სიჩქარე. პირველად ბურთის სიჩქარის ვექტორი მიმართული იყო ვერტიკალურად ქვემოთ, მეორედ - ვერტიკალურად ზემოთ, მესამედ - ჰორიზონტალურად. უგულებელყოთ ჰაერის წინააღმდეგობა. ბურთის სიჩქარის მოდული მიწასთან მიახლოებისას იქნება: 1) პირველ შემთხვევაში მეტი 2) მეორე შემთხვევაში მეტი 3) მესამე შემთხვევაში მეტი 4) ყველა შემთხვევაში ერთნაირი
ინსტალაციის ფოტო 40 გ მასის ვაგონის სრიალის შესასწავლად დახრილი სიბრტყის გასწვრივ 30º კუთხით. მოძრაობის დაწყების მომენტში ზედა სენსორი ჩართავს წამზომს. როდესაც ვაგონი გადის ქვედა სენსორს, წამზომი ჩერდება. გამოთვალეთ გამოთავისუფლებული სითბოს რაოდენობა, როდესაც ვაგონი სრიალებს სენსორებს შორის დახრილ სიბრტყეში.
ის ეშვება 1 წერტილიდან მე-3 წერტილამდე (ნახ.). ტრაექტორიის რომელ წერტილში აქვს მის კინეტიკური ენერგია ყველაზე დიდი მნიშვნელობა? 1) 1 წერტილში. 2) 2 წერტილში. 3) 3 წერტილში. 4) ყველა წერტილში ენერგეტიკული მნიშვნელობები ერთნაირია.
ისინი ადიან მის საპირისპირო ფერდობზე 2 მ სიმაღლეზე (სურათზე 2 წერტილამდე) და ჩერდებიან. ციგას წონა 5 კგ. მათი სიჩქარე ხევის ფსკერზე 10 მ/წმ იყო. როგორ შეიცვალა სასწავლებლის ჯამური მექანიკური ენერგია 1-ლი წერტილიდან მე-2 წერტილამდე გადაადგილებისას? 1) არ შეცვლილა. 2) გაიზარდა 100 ჯ. 3) შემცირდა 100 ჯ. 4) შემცირდა 150 ჯ. 2
სხეულის იმპულსი
სხეულის იმპულსი არის სიდიდე, რომელიც ტოლია სხეულის მასისა და მისი სიჩქარის ნამრავლის.
უნდა გვახსოვდეს, რომ ჩვენ ვსაუბრობთ სხეულზე, რომელიც შეიძლება წარმოდგენილი იყოს როგორც მატერიალური წერტილი. სხეულის იმპულსს ($p$) იმპულსსაც უწოდებენ. იმპულსის ცნება ფიზიკაში შემოიტანა რენე დეკარტმა (1596-1650). ტერმინი "იმპულსი" მოგვიანებით გაჩნდა (impulsus ლათინურად ნიშნავს "ბიძგს"). იმპულსი არის ვექტორული სიდიდე (სიჩქარის მსგავსად) და გამოიხატება ფორმულით:
$p↖(→)=mυ↖(→)$
იმპულსის ვექტორის მიმართულება ყოველთვის ემთხვევა სიჩქარის მიმართულებას.
SI-ში იმპულსის ერთეული არის $1$ კგ მასის მქონე სხეულის იმპულსი, რომელიც მოძრაობს $1$ მ/წმ სიჩქარით, შესაბამისად, იმპულსის ერთეული არის $1$ კგ $·$ მ/წმ.
თუ $∆t$ დროის ინტერვალის განმავლობაში სხეულზე (მატერიალურ წერტილზე) მოქმედებს მუდმივი ძალა, მაშინ აჩქარებაც მუდმივი იქნება:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
სადაც $(υ_1)↖(→)$ და $(υ_2)↖(→)$ არის სხეულის საწყისი და საბოლოო სიჩქარე. ამ მნიშვნელობის ჩანაცვლებით ნიუტონის მეორე კანონის გამოხატულებით, მივიღებთ:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
ფრჩხილების გახსნით და სხეულის იმპულსისთვის გამოხატვის გამოყენებით, გვაქვს:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
აქ $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ არის იმპულსის ცვლილება დროთა განმავლობაში $∆t$. შემდეგ წინა განტოლება ხდება:
$∆p↖(→)=F↖(→)∆t$
გამოთქმა $∆p↖(→)=F↖(→)∆t$ არის ნიუტონის მეორე კანონის მათემატიკური გამოსახულება.
ძალის ნამრავლი და მისი ხანგრძლივობა ეწოდება ძალის იმპულსი. Ამიტომაც წერტილის იმპულსის ცვლილება უდრის მასზე მოქმედი ძალის იმპულსის ცვლილებას.
გამოთქმა $∆p↖(→)=F↖(→)∆t$ ეწოდება სხეულის მოძრაობის განტოლება. უნდა აღინიშნოს, რომ იგივე მოქმედება - წერტილის იმპულსის ცვლილება - შეიძლება მიღებულ იქნას მცირე ძალით გრძელ პერიოდში და დიდი ძალით მცირე დროში.
სისტემის იმპულსი ტელ. იმპულსის ცვლილების კანონი
მექანიკური სისტემის იმპულსი (იმპულსი) არის ვექტორი, რომელიც უდრის ამ სისტემის ყველა მატერიალური წერტილის იმპულსების ჯამს:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
ცვლილებისა და იმპულსის შენარჩუნების კანონები ნიუტონის მეორე და მესამე კანონების შედეგია.
განვიხილოთ სისტემა, რომელიც შედგება ორი სხეულისგან. ძალებს ($F_(12)$ და $F_(21)$ ფიგურაში, რომლებთანაც სისტემის სხეულები ურთიერთქმედებენ ერთმანეთთან, შიდა ეწოდება.
მოდით, სისტემაზე შინაგანი ძალების გარდა მოქმედებენ გარე ძალებმა $(F_1)↖(→)$ და $(F_2)↖(→)$. თითოეული სხეულისთვის შეიძლება დაიწეროს განტოლება $∆p↖(→)=F↖(→)∆t$. ამ განტოლებების მარცხენა და მარჯვენა ნაწილების მიმატებით მივიღებთ:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
ნიუტონის მესამე კანონის მიხედვით $(F_(12))↖(→)=-(F_(21))↖(→)$.
შესაბამისად,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
მარცხენა მხარეს არის სისტემის ყველა სხეულის იმპულსის ცვლილების გეომეტრიული ჯამი, რომელიც უდრის თავად სისტემის იმპულსის ცვლილებას - $(∆p_(syst))↖(→)$. ამის გათვალისწინებით , ტოლობა $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ შეიძლება დაიწეროს:
$(∆p_(sys))↖(→)=F↖(→)∆t$
სადაც $F↖(→)$ არის სხეულზე მოქმედი ყველა გარეგანი ძალის ჯამი. მიღებული შედეგი ნიშნავს, რომ მხოლოდ გარე ძალებს შეუძლიათ შეცვალონ სისტემის იმპულსი, ხოლო სისტემის იმპულსის ცვლილება მიმართულია ისევე, როგორც მთლიანი გარე ძალა. ეს არის მექანიკური სისტემის იმპულსის ცვლილების კანონის არსი.
შინაგან ძალებს არ შეუძლიათ სისტემის მთლიანი იმპულსის შეცვლა. ისინი მხოლოდ ცვლიან სისტემის ცალკეული ორგანოების იმპულსებს.
იმპულსის შენარჩუნების კანონი
$(∆p_(syst))↖(→)=F↖(→)∆t$ განტოლებიდან გამომდინარეობს იმპულსის შენარჩუნების კანონი. თუ სისტემაზე არ მოქმედებს გარე ძალები, მაშინ $(∆p_(syst))↖(→)=F↖(→)∆t$ განტოლების მარჯვენა მხარე ქრება, რაც ნიშნავს, რომ სისტემის მთლიანი იმპულსი უცვლელი რჩება. :
$(∆p_(sys))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
სისტემას, რომელზედაც გარე ძალები არ მოქმედებს ან გარე ძალების შედეგი ნულის ტოლია, ეწოდება დახურული.
იმპულსის შენარჩუნების კანონი ამბობს:
სხეულთა დახურული სისტემის მთლიანი იმპულსი მუდმივი რჩება სისტემის სხეულების ერთმანეთთან ურთიერთქმედებისთვის.
მიღებული შედეგი მოქმედებს სისტემისთვის, რომელიც შეიცავს ორგანოების თვითნებურ რაოდენობას. თუ გარე ძალების ჯამი არ არის ნულის ტოლი, მაგრამ მათი პროგნოზების ჯამი რომელიმე მიმართულებით ნულის ტოლია, მაშინ სისტემის იმპულსის პროექცია ამ მიმართულებით არ იცვლება. ასე რომ, მაგალითად, დედამიწის ზედაპირზე სხეულთა სისტემა არ შეიძლება ჩაითვალოს დახურულად ყველა სხეულზე მოქმედი მიზიდულობის ძალის გამო, თუმცა, იმპულსების პროგნოზების ჯამი ჰორიზონტალურ მიმართულებით შეიძლება დარჩეს უცვლელი (არარსებობის შემთხვევაში ხახუნის), რადგან ამ მიმართულებით სიმძიმის ძალა არ მოქმედებს.
რეაქტიული მოძრაობა
განვიხილოთ მაგალითები, რომლებიც ადასტურებენ იმპულსის შენარჩუნების კანონის მართებულობას.
ავიღოთ საბავშვო რეზინის ბუშტი, გავბეროთ და გავუშვათ. ჩვენ დავინახავთ, რომ როდესაც ჰაერი დაიწყებს მისგან გამოსვლას ერთი მიმართულებით, თავად ბუშტი მეორე მიმართულებით გაფრინდება. ბურთის მოძრაობა რეაქტიული მოძრაობის მაგალითია. ის აიხსნება იმპულსის შენარჩუნების კანონით: სისტემის მთლიანი იმპულსი „ბურთი პლუს ჰაერი მასში“ ჰაერის გადინებამდე ნულის ტოლია; მოძრაობისას უნდა დარჩეს ნულის ტოლი; მაშასადამე, ბურთი მოძრაობს ჭავლის გადინების მიმართულების საპირისპირო მიმართულებით და ისეთი სიჩქარით, რომ მისი იმპულსი აბსოლუტური მნიშვნელობით უტოლდება ჰაერის ჭავლის იმპულსს.
რეაქტიული მოძრაობაეწოდება სხეულის მოძრაობას, რომელიც ხდება მაშინ, როდესაც მისი ნაწილი შორდება მისგან გარკვეული სიჩქარით. იმპულსის შენარჩუნების კანონის გამო, სხეულის მოძრაობის მიმართულება გამოყოფილი ნაწილის მოძრაობის მიმართულების საპირისპიროა.
სარაკეტო ფრენები ეფუძნება რეაქტიული ძრავის პრინციპს. თანამედროვე კოსმოსური რაკეტა ძალიან რთული თვითმფრინავია. რაკეტის მასა არის სამუშაო სითხის მასის ჯამი (ანუ ცხელი აირები, რომლებიც წარმოიქმნება საწვავის წვის შედეგად და გამოიდევნება რეაქტიული ნაკადის სახით) და საბოლოო, ან, როგორც ამბობენ, "მშრალი" მასა. რაკეტა, რომელიც რჩება რაკეტიდან სამუშაო სითხის ამოფრქვევის შემდეგ.
როდესაც რეაქტიული გაზის ჭავლი რაკეტიდან დიდი სიჩქარით გადმოდის, თავად რაკეტა საპირისპირო მიმართულებით მიდის. იმპულსის კონსერვაციის კანონის მიხედვით, რაკეტის მიერ შეძენილი იმპულსი $m_(p)υ_p$ უნდა იყოს ტოლი გამოფრქვეული აირების $m_(გაზი) υ_(გაზი)$:
$m_(p)υ_p=m_(გაზი) υ_(გაზი)$
აქედან გამომდინარეობს, რომ რაკეტის სიჩქარე
$υ_p=((m_(გაზი))/(m_p)) υ_(გაზი)$
ამ ფორმულიდან ჩანს, რომ რაც უფრო დიდია ამოფრქვეული აირების სიჩქარე და მით მეტია სამუშაო სითხის (ე.ი. საწვავის მასის) მასის შეფარდება რაკეტის საბოლოო („მშრალ“) მასასთან, რაკეტის უფრო დიდი სიჩქარე.
ფორმულა $υ_p=((m_(გაზი))/(m_p))·υ_(გაზი)$ მიახლოებითია. არ არის გათვალისწინებული, რომ საწვავის წვისას მფრინავი რაკეტის მასა სულ უფრო მცირდება. რაკეტის სიჩქარის ზუსტი ფორმულა 1897 წელს მიიღო კ.ე.ციოლკოვსკიმ და ატარებს მის სახელს.
ძალისმიერი სამუშაო
ტერმინი „ნამუშევარი“ ფიზიკაში 1826 წელს შემოიღო ფრანგმა მეცნიერმა ჟ.პონსლეტმა. თუ ყოველდღიურ ცხოვრებაში მხოლოდ ადამიანის შრომას ჰქვია სამუშაო, მაშინ ფიზიკაში და, კერძოდ, მექანიკაში, ზოგადად მიღებულია, რომ სამუშაო ძალით კეთდება. სამუშაოს ფიზიკური რაოდენობა ჩვეულებრივ აღინიშნება ასო $A$-ით.
ძალისმიერი სამუშაო- ეს არის ძალის მოქმედების საზომი, რაც დამოკიდებულია მის მოდულზე და მიმართულებაზე, ასევე ძალის გამოყენების წერტილის გადაადგილებაზე. მუდმივი ძალისა და მართკუთხა მოძრაობისთვის, სამუშაო განისაზღვრება თანასწორობით:
$A=F|∆r↖(→)|cosα$
სადაც $F$ არის სხეულზე მოქმედი ძალა, $∆r↖(→)$ არის გადაადგილება, $α$ არის კუთხე ძალასა და გადაადგილებას შორის.

ძალის მუშაობა უდრის ძალისა და გადაადგილების მოდულების ნამრავლს და მათ შორის კუთხის კოსინუსს, ანუ $F↖(→)$ და $∆r↖(→)$ ვექტორების სკალარული ნამრავლი.
სამუშაო არის სკალარული რაოდენობა. თუ $α 0$, და თუ $90°
როდესაც სხეულზე მოქმედებს რამდენიმე ძალა, მთლიანი სამუშაო (ყველა ძალის მუშაობის ჯამი) უდრის მიღებული ძალის მუშაობას.
SI მუშაობის ერთეული არის ჯოული($1$ J). $1$ J არის $1$ N ძალის მიერ შესრულებული სამუშაო ამ ძალის მიმართულებით $1$ m გზაზე. ამ ერთეულს ეწოდა ინგლისელი მეცნიერის ჯ. ჯოულის (1818-1889) სახელი: $1$ J = $1$ N $·$ მ. ხშირად გამოიყენება კილოჯოულები და მილიჯოულები: $1$ kJ $= 1000$ J, $1$ mJ $. = 0.001$ ჯ.
სიმძიმის მუშაობა
განვიხილოთ სხეული, რომელიც სრიალებს დახრილ სიბრტყეში $α$ დახრილობის კუთხით და $H$ სიმაღლით.

ჩვენ გამოვხატავთ $∆x$-ს $H$ და $α$-ით:
$∆x=(H)/(sinα)$
იმის გათვალისწინებით, რომ გრავიტაცია $F_т=mg$ ქმნის კუთხეს ($90° - α$) მოძრაობის მიმართულებით, $∆x=(H)/(sin)α$ ფორმულის გამოყენებით, ჩვენ ვიღებთ გამოხატულებას გრავიტაციის მუშაობისთვის. $A_g$:
$A_g=მგ cos(90°-α)(H)/(sinα)=მგH$
ამ ფორმულიდან ჩანს, რომ სიმძიმის მუშაობა დამოკიდებულია სიმაღლეზე და არ არის დამოკიდებული სიბრტყის დახრილობის კუთხეზე.
აქედან გამომდინარეობს, რომ:
- გრავიტაციის მუშაობა არ არის დამოკიდებული ტრაექტორიის ფორმაზე, რომლის გასწვრივაც სხეული მოძრაობს, არამედ მხოლოდ სხეულის საწყის და საბოლოო პოზიციაზე;
- როდესაც სხეული მოძრაობს დახურულ ტრაექტორიაზე, მიზიდულობის მუშაობა ნულის ტოლია, ანუ გრავიტაცია არის კონსერვატიული ძალა (კონსერვატიული ძალები არის ძალები, რომლებსაც აქვთ ეს თვისება).
რეაქციის ძალების მუშაობა, არის ნული, რადგან რეაქციის ძალა ($N$) მიმართულია $∆x$ გადაადგილების პერპენდიკულურად.
ხახუნის ძალის მუშაობა
ხახუნის ძალა მიმართულია $∆x$ გადაადგილების საპირისპიროდ და ქმნის კუთხეს $180°$, ამიტომ ხახუნის ძალის მოქმედება უარყოფითია:
$A_(tr)=F_(tr)∆x cos180°=-F_(tr) ∆x$
ვინაიდან $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ მაშინ
$A_(tr)=μmgHctgα$
დრეკადობის ძალის მუშაობა
დაე, $l_0$ სიგრძის გაუწელ ზამბარზე იმოქმედოს $F↖(→)$ გარე ძალამ, რომელიც გაჭიმავს მას $∆l_0=x_0$-ით. პოზიციაში $x=x_0F_(კონტროლი)=kx_0$. $F↖(→)$ ძალის შეწყვეტის შემდეგ $x_0$ წერტილში, ზამბარა შეკუმშულია $F_(კონტროლი)$ ძალის მოქმედებით.

განვსაზღვროთ დრეკადობის ძალის მოქმედება, როდესაც ზამბარის მარჯვენა ბოლოს კოორდინატი იცვლება $х_0$-დან $х$-მდე. ვინაიდან დრეკადობის ძალა ამ ზონაში იცვლება წრფივად, ჰუკის კანონში მისი საშუალო მნიშვნელობა ამ არეში შეიძლება გამოვიყენოთ:
$F_(ex.av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
შემდეგ სამუშაო (იმ ფაქტის გათვალისწინებით, რომ $(F_(exp.av.))↖(→)$ და $(∆x)↖(→)$ მიმართულებები ემთხვევა) უდრის:
$A_(exerc)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
შეიძლება ნაჩვენები იყოს, რომ ბოლო ფორმულის ფორმა არ არის დამოკიდებული $(F_(exp.av.))↖(→)$-სა და $(∆x)↖(→)$-ს შორის კუთხეზე. დრეკადობის ძალების მუშაობა დამოკიდებულია მხოლოდ ზამბარის დეფორმაციებზე საწყის და საბოლოო მდგომარეობებში.
ამრიგად, ელასტიური ძალა, ისევე როგორც გრავიტაცია, არის კონსერვატიული ძალა.
ძალის ძალა
სიმძლავრე არის ფიზიკური რაოდენობა, რომელიც იზომება სამუშაოს თანაფარდობით იმ პერიოდის განმავლობაში, რომლის დროსაც იგი წარმოიქმნება.
სხვა სიტყვებით რომ ვთქვათ, სიმძლავრე გვიჩვენებს, თუ რამდენი სამუშაოა შესრულებული დროის ერთეულზე (SI-ში, $1$ წმ).
სიმძლავრე განისაზღვრება ფორმულით:
სადაც $N$ არის სიმძლავრე, $A$ არის შესრულებული სამუშაო $∆t$-ში.
$A=F|(∆r)↖(→)|cosα$ ჩანაცვლებით $N=(A)/(∆t)$ ფორმულაში $A$-ის ნაცვლად, მივიღებთ:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
სიმძლავრე უდრის ძალისა და სიჩქარის ვექტორების მოდულების ნამრავლს და ამ ვექტორებს შორის კუთხის კოსინუსს.
სიმძლავრე SI სისტემაში იზომება ვატებში (W). ერთი ვატი ($1$ W) არის სიმძლავრე, რომლითაც $1$ J სამუშაო შესრულებულია $1$ s-ში: $1$ W $= 1$ J/s.
ამ ერთეულს დაარქვეს ინგლისელი გამომგონებლის J. Watt (Watt) პატივსაცემად, რომელმაც შექმნა პირველი ორთქლის ძრავა. თავად ჯ. ვატმა (1736-1819 წწ.) გამოიყენა სიმძლავრის სხვა ერთეული - ცხენის ძალა (ცხენის ძალა), რომელიც მან შემოიტანა ორთქლის ძრავისა და ცხენის მუშაობის შედარების მიზნით: $ 1 $ ცხ.ძ. $= 735,5$ სამ.
ტექნოლოგიაში ხშირად გამოიყენება სიმძლავრის უფრო დიდი ერთეულები - კილოვატი და მეგავატი: $1$ კვტ $= 1000$ ვტ, 1$ მეგავატი $= 1000000$ ვტ.
Კინეტიკური ენერგია. კინეტიკური ენერგიის ცვლილების კანონი
თუ სხეულს ან რამდენიმე ურთიერთმოქმედ სხეულს (სხეულების სისტემას) შეუძლია მუშაობა, მაშინ ისინი ამბობენ, რომ მათ აქვთ ენერგია.
სიტყვა „ენერგია“ (ბერძნ. energia - მოქმედება, საქმიანობა) ხშირად გამოიყენება ყოველდღიურ ცხოვრებაში. ასე, მაგალითად, ადამიანებს, რომლებსაც შეუძლიათ სწრაფად აკეთონ სამუშაო, უწოდებენ ენერგიულებს, დიდი ენერგიით.
ენერგიას, რომელსაც სხეული ფლობს მოძრაობის გამო, კინეტიკური ენერგია ეწოდება.
როგორც ზოგადად ენერგიის განმარტების შემთხვევაში, კინეტიკურ ენერგიაზეც შეგვიძლია ვთქვათ, რომ კინეტიკური ენერგია არის მოძრავი სხეულის მუშაობის უნარი.
ვიპოვოთ $m$ მასის სხეულის კინეტიკური ენერგია, რომელიც მოძრაობს $υ$ სიჩქარით. ვინაიდან კინეტიკური ენერგია არის ენერგია მოძრაობის გამო, მისთვის ნულოვანი მდგომარეობა არის მდგომარეობა, რომელშიც სხეული ისვენებს. ვიპოვეთ სამუშაო, რომელიც აუცილებელია სხეულისთვის მოცემული სიჩქარის გადასაცემად, ჩვენ ვიპოვით მის კინეტიკურ ენერგიას.
ამისათვის ჩვენ ვიანგარიშებთ $∆r↖(→)$ გადაადგილების განყოფილებაზე შესრულებულ სამუშაოს, როდესაც ძალის ვექტორების $F↖(→)$ და გადაადგილების $∆r↖(→)$ ემთხვევა ერთმანეთს. ამ შემთხვევაში, სამუშაო არის
სადაც $∆x=∆r$

წერტილის გადაადგილებისთვის $α=const$ აჩქარებით, მოძრაობის გამოხატულებას აქვს ფორმა:
$∆x=υ_1t+(at^2)/(2),$
სადაც $υ_1$ არის საწყისი სიჩქარე.
გამონათქვამის ჩანაცვლება $∆x$-ით $∆x=υ_1t+(at^2)/(2)$ განტოლებაში $A=F ∆x$ და ნიუტონის მეორე კანონის გამოყენებით $F=ma$ მივიღებთ:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
აჩქარების გამოხატვა საწყისი $υ_1$ და საბოლოო $υ_2$ სიჩქარით $a=(υ_2-υ_1)/(t)$ და ჩანაცვლება $A=ma(υ_1t+(at^2)/(2))=( mat)/ (2)(2υ_1+at)$ გვაქვს:
$A=(m(υ_2-υ_1))/(2) (2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
ახლა საწყის სიჩქარის ნულის ტოლფასი: $υ_1=0$, მივიღებთ გამონათქვამს კინეტიკური ენერგია:
$E_K=(mυ)/(2)=(p^2)/(2m)$
ამრიგად, მოძრავ სხეულს აქვს კინეტიკური ენერგია. ეს ენერგია უდრის სამუშაოს, რომელიც უნდა გაკეთდეს იმისათვის, რომ სხეულის სიჩქარე ნულიდან $υ$-მდე გაიზარდოს.
$E_K=(mυ)/(2)=(p^2)/(2m)$-დან გამომდინარეობს, რომ ძალის მოქმედება სხეულის ერთი პოზიციიდან მეორეზე გადასატანად უდრის კინეტიკური ენერგიის ცვლილებას:
$A=E_(K_2)-E_(K_1)=∆E_K$
ტოლობა $A=E_(K_2)-E_(K_1)=∆E_K$ გამოხატავს თეორემა კინეტიკური ენერგიის ცვლილების შესახებ.
სხეულის კინეტიკური ენერგიის ცვლილება(მატერიალური წერტილი) გარკვეული პერიოდის განმავლობაში უდრის სხეულზე მოქმედი ძალის მიერ ამ დროის განმავლობაში შესრულებულ სამუშაოს.
Პოტენციური ენერგია
პოტენციური ენერგია არის ენერგია, რომელიც განპირობებულია ურთიერთმოქმედი სხეულების ან იმავე სხეულის ნაწილების ურთიერთგანლაგებით.
ვინაიდან ენერგია განისაზღვრება, როგორც სხეულის მუშაობის უნარი, პოტენციური ენერგია ბუნებრივად განისაზღვრება, როგორც ძალის მუშაობა, რომელიც დამოკიდებულია მხოლოდ სხეულების ფარდობით პოზიციაზე. ეს არის გრავიტაციის სამუშაო $A=mgh_1-mgh_2=mgH$ და ელასტიურობის სამუშაო:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
სხეულის პოტენციური ენერგიადედამიწასთან ურთიერთქმედებას ეწოდება ამ სხეულის $m$ მასის ნამრავლისა და თავისუფალი ვარდნის აჩქარების $g$ და სხეულის $h$ სიმაღლის ნამრავლის ტოლი მნიშვნელობა დედამიწის ზედაპირზე:
ელასტიურად დეფორმირებული სხეულის პოტენციური ენერგია არის სიდიდე, რომელიც უდრის სხეულის $k$ დრეკადობის კოეფიციენტის (სიხისტის) ნამრავლის ნახევარს და დეფორმაციის კვადრატს $∆l$:
$E_p=(1)/(2)k∆l^2$
კონსერვატიული ძალების მუშაობა (სიმძიმე და ელასტიურობა), $E_p=mgh$ და $E_p=(1)/(2)k∆l^2$-ის გათვალისწინებით, გამოიხატება შემდეგნაირად:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
ეს ფორმულა საშუალებას გვაძლევს მივცეთ პოტენციური ენერგიის ზოგადი განმარტება.
სისტემის პოტენციური ენერგია არის სიდიდე, რომელიც დამოკიდებულია სხეულების პოზიციაზე, რომლის ცვლილება სისტემის საწყისი მდგომარეობიდან საბოლოო მდგომარეობაში გადასვლისას უდრის სისტემის შიდა კონსერვატიული ძალების მუშაობას. საპირისპირო ნიშნით აღებული.
მინუს ნიშანი განტოლების მარჯვენა მხარეს $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ ნიშნავს, რომ როდესაც სამუშაო კეთდება შინაგანი ძალებით ( მაგალითად, "ქვა-დედამიწის" სისტემაში გრავიტაციის მოქმედებით სხეულის მიწაზე დაცემა), სისტემის ენერგია მცირდება. სისტემაში მუშაობას და პოტენციური ენერგიის ცვლილებას ყოველთვის საპირისპირო ნიშნები აქვს.
ვინაიდან მუშაობა განსაზღვრავს მხოლოდ პოტენციური ენერგიის ცვლილებას, მხოლოდ ენერგიის ცვლილებას აქვს ფიზიკური მნიშვნელობა მექანიკაში. ამრიგად, ნულოვანი ენერგიის დონის არჩევანი თვითნებურია და განისაზღვრება მხოლოდ მოხერხებულობის გათვალისწინებით, მაგალითად, შესაბამისი განტოლებების დაწერის სიმარტივით.
მექანიკური ენერგიის ცვლილებისა და შენარჩუნების კანონი
სისტემის მთლიანი მექანიკური ენერგიამისი კინეტიკური და პოტენციური ენერგიის ჯამი ეწოდება:
იგი განისაზღვრება სხეულების პოზიციით (პოტენციური ენერგია) და მათი სიჩქარით (კინეტიკური ენერგია).
კინეტიკური ენერგიის თეორემის მიხედვით,
$E_k-E_(k_1)=A_p+A_(pr),$
სადაც $А_р$ არის პოტენციური ძალების მუშაობა, $А_(pr)$ არის არაპოტენციური ძალების მუშაობა.
თავის მხრივ, პოტენციური ძალების მუშაობა უდრის სხეულის პოტენციური ენერგიის სხვაობას საწყის $E_(p_1)$ და საბოლოო $E_p$ მდგომარეობებში. ამის გათვალისწინებით, ჩვენ ვიღებთ გამონათქვამს მექანიკური ენერგიის ცვლილების კანონი:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
სადაც ტოლობის მარცხენა მხარე არის მთლიანი მექანიკური ენერგიის ცვლილება, ხოლო მარჯვენა მხარე არის არაპოტენციური ძალების მუშაობა.
Ისე, მექანიკური ენერგიის ცვლილების კანონიკითხულობს:
სისტემის მექანიკური ენერგიის ცვლილება უდრის ყველა არაპოტენციური ძალის მუშაობას.
მექანიკურ სისტემას, რომელშიც მხოლოდ პოტენციური ძალები მოქმედებენ, კონსერვატიული ეწოდება.
კონსერვატიულ სისტემაში $A_(pr) = 0$. ეს გულისხმობს მექანიკური ენერგიის შენარჩუნების კანონი:
დახურულ კონსერვატიულ სისტემაში მთლიანი მექანიკური ენერგია შენარჩუნებულია (დროთა განმავლობაში არ იცვლება):
$E_k+E_p=E_(k_1)+E_(p_1)$
მექანიკური ენერგიის შენარჩუნების კანონი მიღებულია ნიუტონის მექანიკის კანონებიდან, რომლებიც გამოიყენება მატერიალური წერტილების (ან მაკრონაწილაკების) სისტემაზე.
თუმცა, მექანიკური ენერგიის შენარჩუნების კანონი ასევე მოქმედებს მიკრონაწილაკების სისტემაზე, სადაც თავად ნიუტონის კანონები აღარ მოქმედებს.
მექანიკური ენერგიის შენარჩუნების კანონი დროის ერთგვაროვნების შედეგია.
დროის ერთგვაროვნებაარის ის, რომ იმავე საწყის პირობებში, ფიზიკური პროცესების მიმდინარეობა არ არის დამოკიდებული ამ პირობების შექმნის მომენტზე.
მთლიანი მექანიკური ენერგიის შენარჩუნების კანონი ნიშნავს, რომ როდესაც კონსერვატიულ სისტემაში კინეტიკური ენერგია იცვლება, მისი პოტენციური ენერგიაც უნდა შეიცვალოს, რათა მათი ჯამი მუდმივი დარჩეს. ეს ნიშნავს ერთი ტიპის ენერგიის მეორეში გადაქცევის შესაძლებლობას.
მატერიის მოძრაობის სხვადასხვა ფორმის მიხედვით განიხილება ენერგიის სხვადასხვა სახეობა: მექანიკური, შინაგანი (ტოლია მოლეკულების ქაოტური მოძრაობის კინეტიკური ენერგიის ჯამის სხეულის მასის ცენტრთან და პოტენციურ ენერგიასთან მიმართებაში. მოლეკულების ურთიერთქმედება ერთმანეთთან), ელექტრომაგნიტური, ქიმიური (რომელიც შედგება ელექტრონების მოძრაობის კინეტიკური ენერგიისგან და ელექტრული მათი ურთიერთქმედების ენერგია ერთმანეთთან და ატომურ ბირთვებთან), ბირთვული ენერგია და ა.შ. ნათელია, რომ ენერგიის სხვადასხვა ტიპებად დაყოფა საკმაოდ თვითნებურია.
ბუნებრივ მოვლენებს, როგორც წესი, თან ახლავს ერთი ტიპის ენერგიის მეორეში გადაქცევა. ასე, მაგალითად, სხვადასხვა მექანიზმის ნაწილების ხახუნი იწვევს მექანიკური ენერგიის გადაქცევას სითბოდ, ე.ი. შინაგანი ენერგია.თერმოძრავებში, პირიქით, შიდა ენერგია გარდაიქმნება მექანიკურ ენერგიად; გალვანურ უჯრედებში ქიმიური ენერგია გარდაიქმნება ელექტრო ენერგიად და ა.შ.
ამჟამად ენერგიის ცნება ფიზიკის ერთ-ერთი ძირითადი ცნებაა. ეს კონცეფცია განუყოფლად არის დაკავშირებული მოძრაობის ერთი ფორმის მეორეში გადაქცევის იდეასთან.
აი, როგორ არის ჩამოყალიბებული ენერგიის კონცეფცია თანამედროვე ფიზიკაში:
ენერგია არის ყველა სახის მატერიის მოძრაობისა და ურთიერთქმედების ზოგადი რაოდენობრივი საზომი. ენერგია არაფრისგან არ წარმოიქმნება და არ ქრება, ის მხოლოდ ერთი ფორმიდან მეორეში გადადის. ენერგიის კონცეფცია აერთიანებს ბუნების ყველა ფენომენს.
მარტივი მექანიზმები. მექანიზმის ეფექტურობა
მარტივი მექანიზმები არის მოწყობილობები, რომლებიც ცვლის სხეულზე მიმართული ძალების სიდიდეს ან მიმართულებას.
ისინი გამოიყენება დიდი ტვირთის გადასატანად ან ასაწევად მცირე ძალისხმევით. მათ შორისაა ბერკეტი და მისი ჯიშები - ბლოკები (მოძრავი და ფიქსირებული), კარიბჭე, დახრილი თვითმფრინავი და მისი ჯიშები - სოლი, ხრახნი და ა.შ.
Ბერკეტი. ბერკეტის წესი
ბერკეტი არის ხისტი სხეული, რომელსაც შეუძლია ბრუნოს ფიქსირებული საყრდენის გარშემო.

ბერკეტის წესი ამბობს:
ბერკეტი წონასწორობაშია, თუ მასზე გამოყენებული ძალები უკუპროპორციულია მათი მკლავების მიმართ:
$(F_2)/(F_1)=(l_1)/(l_2)$
$(F_2)/(F_1)=(l_1)/(l_2)$ ფორმულიდან, მასზე პროპორციის თვისების გამოყენებით (პროპორციის უკიდურესი წევრების ნამრავლი უდრის მისი შუა წევრების ნამრავლს), ჩვენ შეგიძლიათ მიიღოთ შემდეგი ფორმულა:
მაგრამ $F_1l_1=M_1$ არის ძალის მომენტი, რომელიც ცდილობს ბერკეტის მობრუნებას საათის ისრის მიმართულებით, ხოლო $F_2l_2=M_2$ არის ძალის მომენტი, რომელიც ცდილობს ბერკეტს საათის ისრის საწინააღმდეგოდ. ამრიგად, $M_1=M_2$, რაც დასამტკიცებელი იყო.
ბერკეტის გამოყენება ხალხმა ძველ დროში დაიწყო. მისი დახმარებით ძველ ეგვიპტეში პირამიდების აგებისას მძიმე ქვის ფილების აწევა იყო შესაძლებელი. ბერკეტების გარეშე ეს შეუძლებელი იქნებოდა. ბოლოს და ბოლოს, მაგალითად, კეოპსის პირამიდის ასაგებად, რომლის სიმაღლეა $147$ მ, გამოიყენეს ორ მილიონზე მეტი ქვის ბლოკი, რომელთაგან უმცირესი მასა $2,5$ ტონა იყო!
დღესდღეობით, ბერკეტები ფართოდ გამოიყენება როგორც წარმოებაში (მაგალითად, ამწეები), ასევე ყოველდღიურ ცხოვრებაში (მაკრატელი, მავთულის საჭრელი, სასწორები).
ფიქსირებული ბლოკი
ფიქსირებული ბლოკის მოქმედება მსგავსია ბერკეტის მოქმედების თანაბარი ბერკეტით: $l_1=l_2=r$. გამოყენებული ძალა $F_1$ უდრის დატვირთვას $F_2$ და წონასწორობის პირობაა:
ფიქსირებული ბლოკიგამოიყენება მაშინ, როდესაც საჭიროა ძალის მიმართულების შეცვლა მისი სიდიდის შეცვლის გარეშე.
მოძრავი ბლოკი
მოძრავი ბლოკი მოქმედებს ბერკეტის მსგავსად, რომლის მკლავებია: $l_2=(l_1)/(2)=r$. ამ შემთხვევაში წონასწორობის მდგომარეობას აქვს ფორმა:
სადაც $F_1$ არის გამოყენებული ძალა, $F_2$ არის დატვირთვა. მოძრავი ბლოკის გამოყენება ორჯერ იძლევა ძალას.
პოლისპასტი (ბლოკის სისტემა)
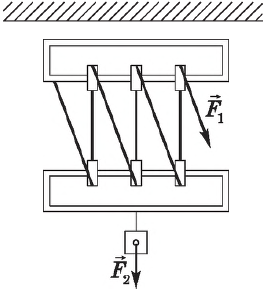
ჩვეულებრივი ჯაჭვის ამწე შედგება $n$ მოძრავი და $n$ ფიქსირებული ბლოკებისაგან. მისი გამოყენება იძლევა $2n$-ჯერ გაზრდას:
$F_1=(F_2)/(2n)$
დენის ჯაჭვის ამწეშედგება n მოძრავი და ერთი ფიქსირებული ბლოკისგან. ელექტრული ჯაჭვის ამწეების გამოყენება იძლევა $2^n$-ჯერ გაზრდის სიძლიერეს:
$F_1=(F_2)/(2^n)$

ხრახნიანი
ხრახნი არის დახრილი სიბრტყის ჭრილობა ღერძზე.

ხრახნიანზე მოქმედი ძალების ბალანსის პირობას აქვს ფორმა:
$F_1=(F_2სთ)/(2πr)=F_2tgα, F_1=(F_2სთ)/(2πR)$

სადაც $F_1$ არის გარე ძალა, რომელიც გამოიყენება ხრახნიდან და მოქმედებს მისი ღერძიდან $R$ მანძილზე; $F_2$ არის ხრახნიანი ღერძის მიმართულებით მოქმედი ძალა; $h$ - ხრახნიანი მოედანი; $r$ არის ძაფის საშუალო რადიუსი; $α$ არის ძაფის კუთხე. $R$ არის ბერკეტის (ქანჩის) სიგრძე, რომელიც ბრუნავს ხრახნს $F_1$ ძალით.
ეფექტურობა
შესრულების კოეფიციენტი (COP) - სასარგებლო სამუშაოს თანაფარდობა მთელ დახარჯულ სამუშაოსთან.
ეფექტურობა ხშირად გამოხატულია პროცენტულად და აღინიშნება ბერძნული ასო $η$ ("ეს"):
$η=(A_p)/(A_3) 100%$
სადაც $A_n$ არის სასარგებლო სამუშაო, $A_3$ არის მთელი დახარჯული სამუშაო.
სასარგებლო სამუშაო ყოველთვის მხოლოდ ნაწილია იმ მთლიანი სამუშაოსა, რომელსაც ადამიანი ხარჯავს ამა თუ იმ მექანიზმის გამოყენებით.
შესრულებული სამუშაოს ნაწილი იხარჯება ხახუნის ძალების დაძლევაზე. ვინაიდან $А_3 > А_п$, ეფექტურობა ყოველთვის არის $1$-ზე ნაკლები (ან $< 100%$).
ვინაიდან ამ განტოლებაში თითოეული ნამუშევარი შეიძლება გამოისახოს შესაბამისი ძალისა და გავლილი მანძილის ნამრავლად, ის შეიძლება გადაიწეროს შემდეგნაირად: $F_1s_1≈F_2s_2$.
აქედან გამომდინარეობს, რომ მოქმედი მექანიზმის დახმარებით მოგებით, გზაში ამდენივეჯერ ვკარგავთ და პირიქით. ამ კანონს მექანიკის ოქროს წესს უწოდებენ.
მექანიკის ოქროს წესი არის მიახლოებითი კანონი, რადგან ის არ ითვალისწინებს სამუშაოს ხახუნისა და სიმძიმის დასაძლევად გამოყენებული მოწყობილობების ნაწილების. მიუხედავად ამისა, ეს შეიძლება იყოს ძალიან სასარგებლო ნებისმიერი მარტივი მექანიზმის მუშაობის გაანალიზებისას.

ასე რომ, მაგალითად, ამ წესის წყალობით, დაუყოვნებლივ შეგვიძლია ვთქვათ, რომ ფიგურაში ასახულ მუშაკს, აწევის ძალის ორმაგი მომატებით $10$ სმ, მოუწევს ბერკეტის საპირისპირო ბოლო 20$ სმ-ით დაწევა.
სხეულების შეჯახება. ელასტიური და არაელასტიური ზემოქმედება
იმპულსის და მექანიკური ენერგიის შენარჩუნების კანონები გამოიყენება შეჯახების შემდეგ სხეულების მოძრაობის პრობლემის გადასაჭრელად: შეჯახების შემდეგ ცნობილი მომენტები და ენერგიები გამოიყენება შეჯახების შემდეგ ამ რაოდენობების მნიშვნელობების დასადგენად. განვიხილოთ დრეკადი და არაელასტიური ზემოქმედების შემთხვევები.
აბსოლუტურად არაელასტიური ზემოქმედება ეწოდება, რის შემდეგაც სხეულები ქმნიან ერთიან სხეულს, რომელიც მოძრაობს გარკვეული სიჩქარით. ამ უკანასკნელის სიჩქარის პრობლემა მოგვარებულია იმპულსის შენარჩუნების კანონის გამოყენებით სხეულების სისტემისთვის $m_1$ და $m_2$ მასებით (თუ საუბარია ორ სხეულზე) ზემოქმედებამდე და მის შემდეგ:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
ცხადია, სხეულების კინეტიკური ენერგია არ არის დაცული არაელასტიური ზემოქმედების დროს (მაგალითად, $(υ_1)↖(→)=-(υ_2)↖(→)$-ზე და $m_1=m_2$-ზე ის ტოლი ხდება ნულის შემდეგ. გავლენა).
აბსოლუტურად ელასტიური ზემოქმედება ეწოდება, რომელშიც დაცულია არა მხოლოდ იმპულსების ჯამი, არამედ შეჯახებული სხეულების კინეტიკური ენერგიების ჯამიც.
აბსოლუტურად ელასტიური ზემოქმედებისთვის, განტოლებები
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2 )^2)/(2)$
სადაც $m_1, m_2$ არის ბურთების მასები, $υ_1, υ_2$ არის ბურთების სიჩქარე დარტყმამდე, $υ"_1, υ"_2$ არის ბურთების სიჩქარე დარტყმის შემდეგ.
