Akékoľvek problémy týkajúce sa pohybu telies v klasickej mechanike vyžadujú znalosť pojmu hybnosť. Tento článok pojednáva o tomto koncepte, poskytuje odpoveď na otázku, kam smeruje vektor hybnosti tela a poskytuje aj príklad riešenia problému.
Množstvo pohybu
Ak chcete zistiť, kam smeruje vektor hybnosti telesa, mali by ste predovšetkým pochopiť jeho fyzikálny význam. Tento termín prvýkrát vysvetlil Isaac Newton, ale je dôležité poznamenať, že taliansky vedec Galileo Galilei už vo svojich prácach použil podobný koncept. Na charakterizáciu pohybujúceho sa objektu zaviedol veličinu nazývanú impulz, tlak alebo samotný impulz (v taliančine impeto). Zásluha Isaaca Newtona spočíva v tom, že túto charakteristiku dokázal prepojiť so silami pôsobiacimi na telo.
Takže, na začiatku a presnejšie, to, čo najviac chápeme pod impulzom tela, sa nazýva množstvo pohybu. Matematický vzorec pre uvažované množstvo je skutočne napísaný v tvare:
Tu je m hmotnosť telesa, v¯ je jeho rýchlosť. Ako vidno zo vzorca, nehovoríme o žiadnom impulze, existuje len rýchlosť telesa a jeho hmotnosť, teda množstvo pohybu.
Je dôležité poznamenať, že tento vzorec nevyplýva z matematických dôkazov alebo výrazov. Jeho výskyt vo fyzike má výlučne intuitívny, každodenný charakter. Každý si teda dobre uvedomuje, že ak sa mucha a kamión pohybujú rovnakou rýchlosťou, bude oveľa ťažšie zastaviť nákladné auto, pretože má oveľa viac pohybu ako hmyz.

Odkiaľ pochádza koncept vektora hybnosti tela, je diskutované nižšie.
Impulz sily je dôvodom zmeny hybnosti
Newton dokázal prepojiť intuitívne zavedenú charakteristiku s druhým zákonom, ktorý nesie jeho meno.
Silový impulz je známa fyzikálna veličina, ktorá sa rovná súčinu pôsobiacej vonkajšej sily na určité teleso a dobe jeho pôsobenia. Použitím známeho Newtonovho zákona a za predpokladu, že sila nezávisí od času, môžeme dospieť k výrazu:
F¯ * Δt = m * a¯ * Δt.
Tu je Δt čas pôsobenia sily F, a je lineárne zrýchlenie udelené silou F telesu s hmotnosťou m. Ako je známe, vynásobenie zrýchlenia telesa časom, počas ktorého pôsobí, vedie k zvýšeniu rýchlosti. Táto skutočnosť nám umožňuje prepísať vyššie uvedený vzorec v trochu inej forme:
F¯ * Δt = m * Δv¯, kde Δv¯= a¯ * Δt.
Pravá strana rovnosti predstavuje zmenu hybnosti (pozri výraz v predchádzajúcom odseku). Potom sa ukáže:
F¯ * Δt = Δp¯, kde Δp¯ = m * Δv¯.
S použitím Newtonovho zákona a konceptu hybnosti teda môžeme dospieť k dôležitému záveru: vplyv vonkajšej sily na objekt v priebehu času vedie k zmene jeho hybnosti.

Teraz je jasné, prečo sa množstvo pohybu zvyčajne nazýva impulz, pretože jeho zmena sa zhoduje s impulzom sily (slovo „sila“ sa zvyčajne vynecháva).
Vektorové množstvo p¯

Niektoré veličiny (F¯, v¯, a¯, p¯) majú nad sebou pruh. To znamená, že hovoríme o vektorovej charakteristike. To znamená, že množstvo pohybu, rovnako ako rýchlosť, sila a zrýchlenie, je okrem absolútnej hodnoty (modulu) opísané aj smerom.
Keďže každý vektor je možné rozložiť na jednotlivé zložky pomocou karteziánskeho pravouhlého súradnicového systému, môžeme zapísať nasledujúce rovnosti:
1) p = m * v;
2) p x = m * v x; p y = m * v y; pz = m*vz;
3) |p¯| = √(p x 2 + p y 2 + p z 2).
Tu je 1. výraz vektorovou formou vyjadrenia hybnosti, 2. sada vzorcov vám umožňuje vypočítať každú zo zložiek hybnosti p¯, pričom poznáte zodpovedajúce zložky rýchlosti (indexy x, y, z označujú projekciu vektor na príslušnú súradnicovú os). Nakoniec 3. vzorec umožňuje vypočítať dĺžku impulzného vektora (absolútnu hodnotu veľkosti) cez jeho zložky.
Kam smeruje vektor hybnosti tela?
Po zvážení konceptu hybnosti p¯ a jeho základných vlastností môžeme ľahko odpovedať na položenú otázku. Vektor hybnosti telesa je nasmerovaný rovnakým spôsobom ako vektor lineárnej rýchlosti. Z matematiky je skutočne známe, že vynásobenie vektora a¯ číslom k vedie k vytvoreniu nového vektora b¯, ktorý má nasledujúce vlastnosti:
- jeho dĺžka sa rovná súčinu čísla a modulu pôvodného vektora, teda |b¯| = k * |a¯|;
- je nasmerovaný rovnakým spôsobom ako pôvodný vektor, ak k > 0, inak bude smerovať opačne ako a¯.
V tomto prípade zohráva úlohu vektora a¯ rýchlosť v¯, hybnosť p¯ je nový vektor b¯ a číslo k je hmotnosť telesa m. Keďže posledne menované je vždy kladné (m>0), potom pri odpovedi na otázku: aký je smer vektora hybnosti telesa p¯, by sa malo povedať, že je spolusmerovaný s rýchlosťou v¯.
Vektor zmeny hybnosti
Je zaujímavé zvážiť ďalšiu podobnú otázku: kam smeruje vektor zmeny hybnosti tela, teda Δp¯. Na odpoveď by ste mali použiť vzorec získaný vyššie:
F¯ * Δt = m * Δv¯ = Δp¯.
Na základe úvah v predchádzajúcom odseku môžeme povedať, že smer zmeny hybnosti Δp¯ sa zhoduje so smerom vektora sily F¯ (Δt > 0) alebo so smerom vektora zmeny rýchlosti Δv¯ (m > 0).
Tu je dôležité nezamieňať, že hovoríme konkrétne o zmenách množstiev. Vo všeobecnom prípade sa vektory p¯ a Δp¯ nezhodujú, pretože spolu žiadnym spôsobom nesúvisia. Napríklad, ak sila F¯ pôsobí proti rýchlosti v¯ objektu, potom p¯ a Δp¯ budú smerovať opačným smerom.
Kde je dôležité vziať do úvahy vektorový charakter hybnosti?

Vyššie diskutované otázky: kam smeruje vektor hybnosti tela a vektor jeho zmeny, nie sú spôsobené jednoduchou zvedavosťou. Faktom je, že zákon zachovania hybnosti p¯ je splnený pre každú jeho zložku. To znamená, že vo svojej najúplnejšej forme je napísaný takto:
p x = m * v x; p y = m * v y; pz = m*vz.
Každá zložka vektora p¯ si zachováva svoju hodnotu v systéme interagujúcich objektov, ktoré nie sú ovplyvnené vonkajšími silami (Δp¯ = 0).
Ako použiť tento zákon a vektorové reprezentácie veličiny p¯ na riešenie problémov týkajúcich sa interakcie (zrážky) telies?
Problém s dvoma loptičkami
Na obrázku nižšie sú dve gule rôznej hmotnosti letiace pod rôznymi uhlami k vodorovnej čiare. Nech sú hmotnosti guľôčok m 1 = 1 kg, m 2 = 0,5 kg, ich rýchlosti v 1 = 2 m/s, v 2 = 3 m/s. Je potrebné určiť smer impulzu po dopade loptičiek za predpokladu, že loptičky sú absolútne nepružné.

Na začiatku riešenia problému by ste si mali zapísať zákon o stálosti hybnosti vo vektorovej forme, to znamená:
p 1 ¯ + p 2 ¯ = konšt.
Keďže každá zložka hybnosti musí byť zachovaná, musíme tento výraz prepísať aj s ohľadom na to, že po zrážke sa dve gule začnú pohybovať ako jeden objekt (absolútne nepružný náraz):
m 1 * v 1 x + m 2 * v 2 x = (m 1 + m 2) * u x;
M 1 * v 1 y + m 2 * v 2 y = (m 1 + m 2) * u y.
Znamienko mínus pre projekciu hybnosti prvého telesa na os y sa objavilo v dôsledku jeho smeru proti zvolenému vektoru ordinátnej osi (pozri obrázok).
Teraz musíte vyjadriť neznáme zložky rýchlosti u a potom nahradiť známe hodnoty do výrazov (zodpovedajúce projekcie rýchlostí sú určené vynásobením veľkostí vektorov v 1 ¯ a v 2 ¯ goniometrickými funkciami ):
u x = (mi* v 1x + m2 * v 2x) / (m 1 + m2), v 1x = vi * cos(45 o); v 2x = v 2 * cos(30 o);
u x = (1 * 2 * 0,7071 + 0,5 * 3 * 0,866) / (1 + 0,5) = 1,8088 m/s;
uy = (-m1*v1y + m2 * v2y) / (m1 + m2), v1y = v1 * sin(45 o); v2y = v2 * sin(30 o);
u y = (-1 * 2 * 0,7071 + 0,5 * 3 * 0,5) / (1 + 0,5) = -0,4428 m/s.
Sú to dve zložky rýchlosti tela po dopade a „zlepenie“ loptičiek. Keďže smer rýchlosti sa zhoduje s vektorom hybnosti p¯, otázka problému môže byť zodpovedaná, ak je určené u¯. Jeho uhol vzhľadom na vodorovnú os sa bude rovnať arkustangens pomeru zložiek u y a u x:
a = arctan(-0,4428 / 1,8088) = -13,756 o.
Znamienko mínus znamená, že hybnosť (rýchlosť) po náraze bude smerovať dole od osi x.
Guľka kalibru 22 má hmotnosť len 2 g. Ak takúto guľku niekomu hodíte, ľahko ju chytí aj bez rukavíc. Ak sa pokúsite chytiť takúto guľku letiacu z ústia hlavne rýchlosťou 300 m/s, tak nepomôžu ani rukavice.
Ak sa k vám valí vozík s hračkami, môžete ho zastaviť prstom na nohe. Ak sa k vám valí nákladné auto, mali by ste uhnúť nohami z jeho dráhy.


Uvažujme o probléme, ktorý demonštruje súvislosť medzi silovým impulzom a zmenou hybnosti telesa.
Príklad. Hmotnosť loptičky je 400 g, rýchlosť loptičky po dopade je 30 m/s. Sila, ktorou chodidlo pôsobilo na loptu, bola 1500 N a doba dopadu bola 8 ms. Nájdite impulz sily a zmenu hybnosti telesa pre loptu.

Zmena hybnosti tela
Príklad. Odhadnite priemernú silu pôsobiacu na loptičku pri dopade z podlahy.
1) Počas úderu pôsobia na loptu dve sily: sila reakcie na zem, gravitácia.

Reakčná sila sa počas doby nárazu mení, takže je možné zistiť priemernú reakčnú silu podlahy.
2) Zmena hybnosti  telo zobrazené na obrázku
telo zobrazené na obrázku

3) Z druhého Newtonovho zákona

Hlavná vec na zapamätanie
1) Vzorce pre telesný impulz, silový impulz;
2) Smer vektora impulzu;
3) Nájdite zmenu hybnosti telesa
Odvodenie druhého Newtonovho zákona vo všeobecnej forme

Graf F(t). Variabilná sila
Silový impulz sa číselne rovná ploche obrázku pod grafom F(t).

Ak sila nie je v čase konštantná, napríklad lineárne rastie F=kt, potom sa hybnosť tejto sily rovná ploche trojuholníka. Túto silu môžete nahradiť konštantnou silou, ktorá zmení hybnosť tela o rovnakú hodnotu v rovnakom časovom období

Priemerná výsledná sila
ZÁKON ZACHOVANIA HYBNOSTI
Testovanie online
Uzavretá sústava tiel
Ide o systém telies, ktoré interagujú iba medzi sebou. Neexistujú žiadne vonkajšie sily interakcie.
V skutočnom svete takýto systém nemôže existovať, neexistuje spôsob, ako odstrániť všetky vonkajšie interakcie. Uzavretý systém telies je fyzikálny model, tak ako je modelom hmotný bod. Ide o model sústavy telies, ktoré údajne interagujú iba medzi sebou, vonkajšie sily sa neberú do úvahy, sú zanedbávané.
Zákon zachovania hybnosti
V uzavretom systéme tiel vektor súčet hybností telies sa pri interakcii telies nemení. Ak sa hybnosť jedného telesa zvýšila, znamená to, že v tom momente sa hybnosť niektorého iného telesa (alebo viacerých telies) znížila presne o rovnakú hodnotu.
Uvažujme o tomto príklade. Dievča a chlapec sa korčuľujú. Uzavretý systém telies - dievča a chlapec (zanedbávame trenie a iné vonkajšie sily). Dievča stojí na mieste, jej hybnosť je nulová, pretože rýchlosť je nulová (pozri vzorec pre hybnosť telesa). Keď sa chlapec pohybujúci sa určitou rýchlosťou zrazí s dievčaťom, začne sa pohybovať aj ona. Teraz má jej telo hybnosť. Číselná hodnota hybnosti dievčaťa je presne rovnaká ako to, o koľko sa po zrážke znížila hybnosť chlapca.
Jedno teleso s hmotnosťou 20 kg sa pohybuje rýchlosťou, druhé teleso s hmotnosťou 4 kg sa pohybuje rovnakým smerom rýchlosťou . Aké sú impulzy každého tela? Aká je hybnosť systému?


Impulz sústavy telies je vektorový súčet hybností všetkých telies zahrnutých v sústave. V našom príklade ide o súčet dvoch vektorov (keďže sa uvažuje o dvoch telesách), ktoré sú nasmerované rovnakým smerom, preto

Teraz vypočítajme hybnosť sústavy telies z predchádzajúceho príkladu, ak sa druhé teleso pohybuje opačným smerom.

Keďže sa telesá pohybujú v opačných smeroch, získame vektorový súčet viacsmerných impulzov. Prečítajte si viac o súčte vektorov.
Hlavná vec na zapamätanie
1) Čo je to uzavretá sústava telies;
2) Zákon zachovania hybnosti a jeho aplikácia
Impulz tela
Hybnosť telesa je veličina rovnajúca sa súčinu hmotnosti telesa a jeho rýchlosti.
Malo by sa pamätať na to, že hovoríme o telese, ktoré možno znázorniť ako hmotný bod. Hybnosť telesa ($p$) sa nazýva aj hybnosť. Pojem hybnosti zaviedol do fyziky René Descartes (1596–1650). Pojem „impulz“ sa objavil neskôr (impulsus v latinčine znamená „tlačenie“). Hybnosť je vektorová veličina (ako rýchlosť) a je vyjadrená vzorcom:
$p↖(→)=mυ↖(→)$
Smer vektora hybnosti sa vždy zhoduje so smerom rýchlosti.
Jednotkou SI impulzu je impulz telesa s hmotnosťou $1$ kg, ktoré sa pohybuje rýchlosťou $1$ m/s, preto je jednotka impulzu $1$ kg $·$ m/s.
Ak konštantná sila pôsobí na teleso (hmotný bod) počas časového úseku $∆t$, potom bude aj zrýchlenie konštantné:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
kde $(υ_1)↖(→)$ a $(υ_2)↖(→)$ sú počiatočné a konečné rýchlosti telesa. Nahradením tejto hodnoty do výrazu druhého Newtonovho zákona dostaneme:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Otvorením zátvoriek a použitím výrazu pre hybnosť telesa máme:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Tu $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ je zmena hybnosti v čase $∆t$. Potom bude mať predchádzajúca rovnica tvar:
$∆p↖(→)=F↖(→)∆t$
Výraz $∆p↖(→)=F↖(→)∆t$ je matematickým vyjadrením druhého Newtonovho zákona.
Súčin sily a doby jej pôsobenia sa nazýva impulz sily. Preto zmena hybnosti bodu sa rovná zmene hybnosti sily, ktorá naň pôsobí.
Výraz $∆p↖(→)=F↖(→)∆t$ sa nazýva pohybová rovnica tela. Treba si uvedomiť, že rovnakú akciu – zmenu hybnosti bodu – možno dosiahnuť malou silou počas dlhého časového obdobia a veľkou silou počas krátkeho časového obdobia.
Impulz systému tel. Zmena zákona hybnosti
Impulz (množstvo pohybu) mechanického systému je vektor rovný súčtu impulzov všetkých hmotných bodov tohto systému:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Zákony zmeny a zachovania hybnosti sú dôsledkom druhého a tretieho Newtonovho zákona.
Uvažujme systém pozostávajúci z dvoch telies. Sily ($F_(12)$ a $F_(21)$ na obrázku, s ktorými telesá sústavy navzájom interagujú, sa nazývajú vnútorné.
Nechajme na systém pôsobiť okrem vnútorných síl aj vonkajšie sily $(F_1)↖(→)$ a $(F_2)↖(→)$. Pre každé teleso môžeme napísať rovnicu $∆p↖(→)=F↖(→)∆t$. Pridaním ľavej a pravej strany týchto rovníc dostaneme:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Podľa tretieho Newtonovho zákona $(F_(12))↖(→)=-(F_(21))↖(→)$.
teda
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
Na ľavej strane je geometrický súčet zmien impulzov všetkých telies sústavy, ktorý sa rovná zmene impulzu samotnej sústavy - $(∆p_(syst))↖(→)$. účtu, možno rovnosť $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ napísať:
$(∆p_(syst))↖(→)=F↖(→)∆t$
kde $F↖(→)$ je súčet všetkých vonkajších síl pôsobiacich na teleso. Získaný výsledok znamená, že hybnosť systému možno meniť iba vonkajšími silami a zmena hybnosti systému je smerovaná rovnako ako celková vonkajšia sila. Toto je podstata zákona zmeny hybnosti mechanického systému.
Vnútorné sily nemôžu zmeniť celkovú hybnosť systému. Menia len impulzy jednotlivých orgánov systému.
Zákon zachovania hybnosti
Zákon zachovania hybnosti vyplýva z rovnice $(∆p_(syst))↖(→)=F↖(→)∆t$. Ak na systém nepôsobia žiadne vonkajšie sily, potom sa pravá strana rovnice $(∆p_(syst))↖(→)=F↖(→)∆t$ stane nulou, čo znamená, že celková hybnosť systému zostane nezmenená. :
$(∆p_(syst))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Nazýva sa systém, na ktorý nepôsobia žiadne vonkajšie sily alebo je výslednica vonkajších síl nulová ZATVORENÉ.
Zákon zachovania hybnosti hovorí:
Celková hybnosť uzavretého systému telies zostáva konštantná pre akúkoľvek interakciu telies systému navzájom.
Získaný výsledok je platný pre systém obsahujúci ľubovoľný počet telies. Ak súčet vonkajších síl nie je rovný nule, ale súčet ich priemetov do nejakého smeru je rovný nule, potom sa priemet hybnosti systému do tohto smeru nemení. Takže napríklad sústavu telies na povrchu Zeme nemožno považovať za uzavretú v dôsledku gravitačnej sily pôsobiacej na všetky telesá, avšak súčet priemetov impulzov na vodorovný smer môže zostať nezmenený (v neprítomnosti trenia), keďže v tomto smere gravitačná sila nepôsobí.
Prúdový pohon
Uvažujme príklady, ktoré potvrdzujú platnosť zákona zachovania hybnosti.
Vezmeme detskú gumenú loptičku, nafúkneme ju a uvoľníme. Uvidíme, že keď ho vzduch začne opúšťať jedným smerom, loptička sama poletí druhým. Pohyb gule je príkladom prúdového pohybu. Vysvetľuje sa to zákonom zachovania hybnosti: celková hybnosť systému „guľa plus vzduch v nej“ pred prúdením vzduchu je nulová; počas pohybu musí zostať rovný nule; preto sa loptička pohybuje v smere opačnom ako je smer prúdenia prúdu, a to takou rýchlosťou, že jej hybnosť sa čo do veľkosti rovná hybnosti prúdu vzduchu.
Prúdový pohyb nazývame pohyb telesa, ku ktorému dochádza, keď sa nejaká jeho časť od neho oddelí akoukoľvek rýchlosťou. V dôsledku zákona zachovania hybnosti je smer pohybu telesa opačný ako smer pohybu oddelenej časti.
Lety rakiet sú založené na princípe prúdového pohonu. Moderná vesmírna raketa je veľmi zložité lietadlo. Hmotnosť rakety pozostáva z hmotnosti pracovnej tekutiny (t. j. horúcich plynov vytvorených v dôsledku spaľovania paliva a emitovaných vo forme prúdového prúdu) a konečnej, alebo, ako sa hovorí, „suchej“ hmotnosti raketa zostávajúca po vymrštení pracovnej tekutiny z rakety.
Keď je prúd plynu vyvrhnutý z rakety vysokou rýchlosťou, samotná raketa sa rúti opačným smerom. Podľa zákona zachovania hybnosti sa hybnosť $m_(p)υ_p$ získaná raketou musí rovnať hybnosti $m_(plyn)·υ_(plyn)$ vyvrhnutých plynov:
$m_(p)υ_p=m_(plyn)·υ_(plyn)$
Z toho vyplýva, že rýchlosť rakety
$υ_p=((m_(plyn))/(m_p))·υ_(plyn)$
Z tohto vzorca je zrejmé, že čím väčšia je rýchlosť rakety, tým väčšia je rýchlosť emitovaných plynov a pomer hmotnosti pracovnej tekutiny (t. j. hmotnosti paliva) ku konečnému („suchému“). hmotnosť rakety.
Vzorec $υ_p=((m_(plyn))/(m_p))·υ_(plyn)$ je približný. Neberie do úvahy, že ako palivo horí, hmotnosť lietajúcej rakety je čoraz menšia. Presný vzorec pre rýchlosť rakety získal v roku 1897 K. E. Ciolkovsky a nesie jeho meno.
Dielo sily
Termín „práca“ zaviedol do fyziky v roku 1826 francúzsky vedec J. Poncelet. Ak sa v každodennom živote nazýva prácou iba ľudská práca, potom sa vo fyzike a najmä v mechanike všeobecne uznáva, že práca sa vykonáva silou. Fyzické množstvo práce sa zvyčajne označuje písmenom $A$.
Dielo sily je miera pôsobenia sily v závislosti od jej veľkosti a smeru, ako aj od pohybu miesta pôsobenia sily. Pre konštantnú silu a lineárny posun je práca určená rovnosťou:
$A=F|∆r↖(→)|cosα$
kde $F$ je sila pôsobiaca na teleso, $∆r↖(→)$ je posunutie, $α$ je uhol medzi silou a posunutím.

Práca sily sa rovná súčinu modulov sily a posunutia a kosínusu uhla medzi nimi, t.j. skalárnemu súčinu vektorov $F↖(→)$ a $∆r↖(→)$.
Práca je skalárna veličina. Ak $α 0$, a ak $90°
Keď na teleso pôsobí niekoľko síl, celková práca (súčet práce všetkých síl) sa rovná práci výslednej sily.
Jednotkou práce v SI je joule(1 $ J). $1$ J je práca vykonaná silou $1$ N po dráhe $1$ m v smere pôsobenia tejto sily. Táto jednotka je pomenovaná po anglickom vedcovi J. Joule (1818-1889): $1$ J = $1$ N $·$ m Často sa používajú aj kilojouly a milijouly: $1$ kJ $= 1 000 $ J, $1$ mJ $ = 0,001 USD J.
Práca gravitácie
Uvažujme teleso posúvajúce sa po naklonenej rovine s uhlom sklonu $α$ a výškou $H$.

Vyjadrime $∆x$ v podmienkach $H$ a $α$:
$∆x=(H)/(sinα)$
Ak vezmeme do úvahy, že gravitačná sila $F_т=mg$ zviera so smerom pohybu uhol ($90° - α$), pomocou vzorca $∆x=(H)/(sin)α$ dostaneme výraz pre gravitačná práca $A_g$:
$A_g=mg cos(90°-α) (H)/(sinα)=mgH$
Z tohto vzorca je zrejmé, že práca vykonaná gravitáciou závisí od výšky a nezávisí od uhla sklonu roviny.
Z toho vyplýva, že:
- gravitačná práca nezávisí od tvaru trajektórie, po ktorej sa teleso pohybuje, ale len od počiatočnej a konečnej polohy telesa;
- keď sa teleso pohybuje po uzavretej trajektórii, práca vykonaná gravitáciou je nulová, t.j. gravitácia je konzervatívna sila (sily, ktoré majú túto vlastnosť, sa nazývajú konzervatívne).
Práca reakčných síl, sa rovná nule, pretože reakčná sila ($N$) smeruje kolmo na posunutie $∆x$.
Práca trecej sily
Trecia sila smeruje opačne k posunutiu $∆x$ a zviera s ním uhol $180°$, preto je pôsobenie trecej sily záporné:
$A_(tr)=F_(tr)∆x·cos180°=-F_(tr)·∆x$
Pretože $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ potom
$A_(tr)=μmgHctgα$
Práca elastickej sily
Nech pôsobí vonkajšia sila $F↖(→)$ na nenatiahnutú pružinu dĺžky $l_0$ a natiahne ju o $∆l_0=x_0$. Na pozícii $x=x_0F_(kontrola)=kx_0$. Keď sila $F↖(→)$ prestane pôsobiť v bode $x_0$, pružina sa stlačí pôsobením sily $F_(ovládanie)$.

Určme prácu pružnej sily, keď sa súradnica pravého konca pružiny zmení z $x_0$ na $x$. Pretože sa elastická sila v tejto oblasti mení lineárne, Hookov zákon môže použiť jej priemernú hodnotu v tejto oblasti:
$F_(kontrolný priemer)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Potom sa práca (berúc do úvahy skutočnosť, že smery $(F_(kontrolný priemer))↖(→)$ a $(∆x)↖(→)$ zhodujú) rovná:
$A_(kontrola)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Dá sa ukázať, že tvar posledného vzorca nezávisí od uhla medzi $(F_(riadiaci priemer))↖(→)$ a $(∆x)↖(→)$. Práca pružných síl závisí len od deformácií pružiny v počiatočnom a koncovom stave.
Elastická sila, podobne ako gravitačná sila, je teda konzervatívna sila.
Silový výkon
Výkon je fyzikálna veličina meraná pomerom práce k časovému úseku, počas ktorého sa vyrába.
Inými slovami, výkon ukazuje, koľko práce sa vykoná za jednotku času (v SI - za $ 1 $ s).
Výkon je určený vzorcom:
kde $N$ je výkon, $A$ je práca vykonaná za čas $∆t$.
Dosadením do vzorca $N=(A)/(∆t)$ namiesto práce $A$ jeho výraz $A=F|(∆r)↖(→)|cosα$ dostaneme:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Výkon sa rovná súčinu veličín vektorov sily a rýchlosti a kosínusu uhla medzi týmito vektormi.
Výkon v sústave SI sa meria vo wattoch (W). Jeden watt (1 $ W) je výkon, pri ktorom sa vykoná práca 1 $ J za $ 1 $ s: $ 1 $ W $ = 1 $ J/s.
Táto jednotka je pomenovaná po anglickom vynálezcovi J. Wattovi (Wattovi), ktorý zostrojil prvý parný stroj. Sám J. Watt (1736-1819) používal inú jednotku výkonu - konskú silu (hp), ktorú zaviedol, aby mohol porovnať výkon parného stroja a koňa: $1$ hp. $= 735,5 $ W.
V technológii sa často používajú väčšie výkonové jednotky - kilowatt a megawatt: $ 1 $ kW $ = 1 000 $ W, $ 1 $ MW $ = 1 000 000 $ W.
Kinetická energia. Zákon zmeny kinetickej energie
Ak telo alebo niekoľko interagujúcich telies (systém telies) môže vykonávať prácu, potom sa hovorí, že majú energiu.
Slovo „energia“ (z gréckeho slova energia – akcia, aktivita) sa často používa v každodennom živote. Napríklad ľudia, ktorí dokážu pracovať rýchlo, sa nazývajú energickí, majú veľkú energiu.
Energia, ktorú má teleso v dôsledku pohybu, sa nazýva kinetická energia.
Rovnako ako v prípade definície energie vo všeobecnosti, aj o kinetickej energii môžeme povedať, že kinetická energia je schopnosť pohybujúceho sa telesa konať prácu.
Nájdite kinetickú energiu telesa s hmotnosťou $m$ pohybujúceho sa rýchlosťou $υ$. Keďže kinetická energia je energia v dôsledku pohybu, jej nulový stav je stav, v ktorom je teleso v pokoji. Po nájdení práce potrebnej na udelenie danej rýchlosti telesu nájdeme jeho kinetickú energiu.
Aby sme to urobili, vypočítajme prácu v oblasti posunutia $∆r↖(→)$, keď sa smery vektorov sily $F↖(→)$ a posunutia $∆r↖(→)$ zhodujú. V tomto prípade je práca rovnaká
kde $∆x=∆r$

Pre pohyb bodu so zrýchlením $α=const$ má výraz pre posunutie tvar:
$∆x=υ_1t+(at^2)/(2),$
kde $υ_1$ je počiatočná rýchlosť.
Dosadením do rovnice $A=F·∆x$ výraz pre $∆x$ z $∆x=υ_1t+(at^2)/(2)$ a použitím druhého Newtonovho zákona $F=ma$ dostaneme:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Vyjadrenie zrýchlenia prostredníctvom počiatočných $υ_1$ a konečných $υ_2$ rýchlostí $a=(υ_2-υ_1)/(t)$ a dosadenie v $A=ma(υ_1t+(at^2)/(2))=(mat )/ (2)(2υ_1+at)$ máme:
$A=(m(υ_2-υ_1))/(2)·(2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Teraz prirovnajúc počiatočnú rýchlosť k nule: $υ_1=0$, získame výraz pre Kinetická energia:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Pohybujúce sa teleso má teda kinetickú energiu. Táto energia sa rovná práci, ktorú treba vykonať, aby sa rýchlosť telesa zvýšila z nuly na hodnotu $υ$.
Z $E_K=(mυ)/(2)=(p^2)/(2m)$ vyplýva, že práca vykonaná silou na presun telesa z jednej polohy do druhej sa rovná zmene kinetickej energie:
$A=E_(K_2)-E_(K_1)=∆E_K$
Rovnosť $A=E_(K_2)-E_(K_1)=∆E_K$ vyjadruje teorém o zmene kinetickej energie.
Zmena kinetickej energie tela(hmotný bod) sa za určitý čas rovná práci vykonanej za tento čas silou pôsobiacou na teleso.
Potenciálna energia
Potenciálna energia je energia určená vzájomnou polohou interagujúcich telies alebo častí toho istého telesa.
Keďže energia je definovaná ako schopnosť telesa konať prácu, potenciálna energia je prirodzene definovaná ako práca vykonaná silou, ktorá závisí iba od relatívnej polohy telies. Toto je práca gravitácie $A=mgh_1-mgh_2=mgH$ a práca elasticity:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Potenciálna energia tela pri interakcii so Zemou nazývajú veličinu rovnajúcu sa súčinu hmotnosti $m$ tohto telesa zrýchlením voľného pádu $g$ a výškou $h$ telesa nad povrchom Zeme:
Potenciálna energia elasticky deformovaného telesa je hodnota rovnajúca sa polovici súčinu koeficientu pružnosti (tuhosti) $k$ telesa a štvorcovej deformácie $∆l$:
$E_p=(1)/(2)k∆l^2$
Práca konzervatívnych síl (gravitácia a elasticita), berúc do úvahy $E_p=mgh$ a $E_p=(1)/(2)k∆l^2$, je vyjadrená takto:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Tento vzorec nám umožňuje poskytnúť všeobecnú definíciu potenciálnej energie.
Potenciálna energia sústavy je veličina, ktorá závisí od polohy telies, pričom zmena, pri ktorej sa pri prechode sústavy z počiatočného stavu do konečného stavu rovná práci vnútorných konzervatívnych síl sústavy, brané s opačným znamienkom.
Znamienko mínus na pravej strane rovnice $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ znamená, že keď prácu vykonávajú vnútorné sily ( napríklad pád telies na zem pod vplyvom gravitácie v systéme „kamena-Zem“), energia systému klesá. Práca a zmeny potenciálnej energie v systéme majú vždy opačné znaky.
Keďže práca určuje iba zmenu potenciálnej energie, potom iba zmena energie má v mechanike fyzikálny význam. Preto je výber úrovne nulovej energie svojvoľný a určený výlučne z hľadiska pohodlia, napríklad jednoduchosti písania zodpovedajúcich rovníc.
Zákon zmeny a zachovania mechanickej energie
Celková mechanická energia systému súčet jeho kinetických a potenciálnych energií sa nazýva:
Je určená polohou telies (potenciálna energia) a ich rýchlosťou (kinetická energia).
Podľa vety o kinetickej energii
$E_k-E_(k_1)=A_p+A_(pr),$
kde $A_p$ je dielom potenciálnych síl, $A_(pr)$ je dielom nepotencionálnych síl.
Práca potenciálnych síl sa zasa rovná rozdielu potenciálnej energie telesa v počiatočnom stave $E_(p_1)$ a v konečnom $E_p$. Ak to vezmeme do úvahy, dostaneme výraz pre zákon zmeny mechanickej energie:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
kde ľavá strana rovnosti je zmena celkovej mechanickej energie a pravá strana je práca nepotencionálnych síl.
takže, zákon zmeny mechanickej energie znie:
Zmena mechanickej energie systému sa rovná práci všetkých nepotencionálnych síl.
Mechanický systém, v ktorom pôsobia iba potenciálne sily, sa nazýva konzervatívny.
V konzervatívnom systéme $A_(pr) = 0$. to znamená zákon zachovania mechanickej energie:
V uzavretom konzervatívnom systéme je zachovaná celková mechanická energia (nemení sa s časom):
$E_k+E_p=E_(k_1)+E_(p_1)$
Zákon zachovania mechanickej energie je odvodený z Newtonových zákonov mechaniky, ktoré sú aplikovateľné na sústavu hmotných bodov (alebo makročastíc).
Zákon zachovania mechanickej energie však platí aj pre systém mikročastíc, kde už samotné Newtonove zákony neplatia.
Zákon zachovania mechanickej energie je dôsledkom rovnomernosti času.
Jednotnosť času je, že za rovnakých počiatočných podmienok výskyt fyzikálnych procesov nezávisí od toho, v akom časovom bode sú tieto podmienky vytvorené.
Zákon zachovania celkovej mechanickej energie znamená, že pri zmene kinetickej energie v konzervatívnom systéme sa musí zmeniť aj jej potenciálna energia, aby ich súčet zostal konštantný. To znamená možnosť premeny jedného druhu energie na iný.
V súlade s rôznymi formami pohybu hmoty sa zvažujú rôzne druhy energie: mechanická, vnútorná (rovnajúca sa súčtu kinetickej energie chaotického pohybu molekúl vzhľadom na ťažisko tela a potenciálnej energie vzájomné pôsobenie molekúl), elektromagnetické, chemické (ktoré pozostáva z kinetickej energie pohybu elektrónov a elektrickej energie ich vzájomného pôsobenia a s atómovými jadrami), jadrové a pod.. Z vyššie uvedeného je zrejmé, že rozdelenie energie na rôzne druhy je celkom ľubovoľné.
Prírodné javy sú zvyčajne sprevádzané premenou jedného druhu energie na iný. Napríklad trenie častí rôznych mechanizmov vedie k premene mechanickej energie na teplo, t.j. vnútornej energie. V tepelných motoroch sa naopak vnútorná energia premieňa na mechanickú energiu; v galvanických článkoch sa chemická energia premieňa na elektrickú energiu atď.
V súčasnosti je pojem energie jedným zo základných pojmov fyziky. Tento koncept je neoddeliteľne spojený s myšlienkou transformácie jednej formy pohybu na druhú.
Takto je pojem energie formulovaný v modernej fyzike:
Energia je všeobecná kvantitatívna miera pohybu a interakcie všetkých druhov hmoty. Energia nevzniká z ničoho a nezaniká, môže sa len presúvať z jednej formy do druhej. Pojem energie spája všetky prírodné javy.
Jednoduché mechanizmy. Účinnosť mechanizmu
Jednoduché mechanizmy sú zariadenia, ktoré menia veľkosť alebo smer síl pôsobiacich na teleso.
Používajú sa na presun alebo zdvíhanie veľkých bremien s malým úsilím. Patria sem páka a jej odrody - bloky (pohyblivé a pevné), brány, naklonená rovina a jej odrody - klin, skrutka atď.
Rameno páky. Pravidlo pákového efektu
Páka je pevné teleso schopné otáčania okolo pevnej podpery.

Pravidlo pákového efektu hovorí:
Páka je v rovnováhe, ak sily na ňu pôsobiace sú nepriamo úmerné jej ramenám:
$(F_2)/(F_1)=(l_1)/(l_2)$
Zo vzorca $(F_2)/(F_1)=(l_1)/(l_2)$, pričom naň použijeme vlastnosť proporcie (súčin extrémnych členov pomeru sa rovná súčinu jeho stredných členov), môže získať nasledujúci vzorec:
Ale $F_1l_1=M_1$ je moment sily, ktorý má tendenciu otočiť páku v smere hodinových ručičiek, a $F_2l_2=M_2$ je moment sily, ktorá sa pokúša otočiť páku proti smeru hodinových ručičiek. Teda $M_1=M_2$, čo je potrebné dokázať.
Páku začali používať ľudia už v staroveku. S jeho pomocou bolo možné dvíhať ťažké kamenné dosky pri stavbe pyramíd v starovekom Egypte. Bez pákového efektu by to nebolo možné. Veď napríklad na stavbu Cheopsovej pyramídy, ktorá má výšku 147 $ m, bolo použitých viac ako dva milióny kamenných blokov, z ktorých najmenší vážil 2,5 $ tony!
V súčasnosti sú páky široko používané ako vo výrobe (napríklad žeriavy), tak aj v každodennom živote (nožnice, rezačky drôtu, váhy).
Pevný blok
Pôsobenie pevného bloku je podobné pôsobeniu páky s rovnakými ramenami: $l_1=l_2=r$. Aplikovaná sila $F_1$ sa rovná zaťaženiu $F_2$ a podmienka rovnováhy je:
Pevný blok používa sa, keď potrebujete zmeniť smer sily bez zmeny jej veľkosti.
Pohyblivý blok
Pohyblivý blok pôsobí podobne ako páka, ktorej ramená sú: $l_2=(l_1)/(2)=r$. V tomto prípade má rovnovážna podmienka tvar:
kde $F_1$ je použitá sila, $F_2$ je zaťaženie. Použitie pohyblivého bloku poskytuje dvojnásobný nárast sily.
Kladkový kladkostroj (blokový systém)

Bežný reťazový kladkostroj pozostáva z $n$ pohyblivých a $n$ pevných blokov. Jeho použitím získate na sile 2 n$ krát:
$F_1=(F_2)/(2n)$
Motorový reťazový kladkostroj pozostáva z n pohyblivého a jedného pevného bloku. Použitie silovej kladky poskytuje zvýšenie pevnosti 2^n$ krát:
$F_1=(F_2)/(2^n)$

Skrutka
Skrutka je naklonená rovina navinutá okolo osi.
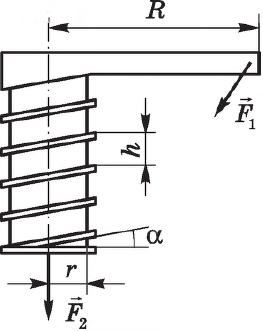
Rovnovážna podmienka pre sily pôsobiace na vrtuľu má tvar:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

kde $F_1$ je vonkajšia sila pôsobiaca na vrtuľu a pôsobiaca vo vzdialenosti $R$ od jej osi; $F_2$ je sila pôsobiaca v smere osi vrtule; $h$ — stúpanie vrtule; $r$ je priemerný polomer závitu; $α$ je uhol sklonu závitu. $R$ je dĺžka páky (kľúča), ktorá otáča skrutku silou $F_1$.
Efektívnosť
Koeficient efektívnosti (efektívnosti) je pomer užitočnej práce ku všetkej vynaloženej práci.
Účinnosť sa často vyjadruje v percentách a označuje sa gréckym písmenom $η$ („toto“):
$η=(A_p)/(A_3)·100 %$
kde $A_n$ je užitočná práca, $A_3$ je všetka vynaložená práca.
Užitočná práca vždy tvorí len časť celkovej práce, ktorú človek vynaloží pomocou toho či onoho mechanizmu.
Časť vykonanej práce sa vynakladá na prekonanie trecích síl. Od $A_3 > A_n$ je efektivita vždy nižšia ako $1$ (alebo $< 100%$).
Keďže každé dielo v tejto rovnosti možno vyjadriť ako súčin zodpovedajúcej sily a prejdenej vzdialenosti, možno ho prepísať takto: $F_1s_1≈F_2s_2$.
Z toho vyplýva, výhrami pomocou mechanizmu v sile, rovnako veľakrát po ceste prehráme a naopak. Tento zákon sa nazýva zlaté pravidlo mechaniky.
Zlaté pravidlo mechaniky je približný zákon, pretože nezohľadňuje prácu na prekonaní trenia a gravitácie častí použitých zariadení. Napriek tomu môže byť veľmi užitočný pri analýze fungovania akéhokoľvek jednoduchého mechanizmu.

Takže napríklad vďaka tomuto pravidlu môžeme okamžite povedať, že pracovník zobrazený na obrázku s dvojnásobným nárastom sily pri zdvíhaní bremena o $ 10 $ cm, bude musieť spustiť opačný koniec páky o $ 20. $ cm.
Zrážka tiel. Elastické a neelastické vplyvy
Na riešenie problému pohybu telies po zrážke sa využívajú zákony zachovania hybnosti a mechanickej energie: zo známych impulzov a energií pred zrážkou sa určia hodnoty týchto veličín po zrážke. Uvažujme o prípadoch elastických a nepružných nárazov.
Náraz sa nazýva absolútne nepružný, po ktorom telesá tvoria jediné teleso pohybujúce sa určitou rýchlosťou. Problém rýchlosti posledne menovaného je riešený pomocou zákona zachovania hybnosti sústavy telies s hmotnosťou $m_1$ a $m_2$ (ak hovoríme o dvoch telesách) pred a po náraze:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Je zrejmé, že kinetická energia telies pri nepružnom náraze sa nezachová (napr. pre $(υ_1)↖(→)=-(υ_2)↖(→)$ a $m_1=m_2$ sa rovná nule po náraze).
Náraz, pri ktorom sa zachováva nielen súčet impulzov, ale aj súčet kinetických energií dopadajúcich telies, sa nazýva absolútne elastický.
Pre absolútne elastický náraz platia nasledujúce rovnice:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2 )^2)/(2)$
kde $m_1, m_2$ sú hmotnosti loptičiek, $υ_1, υ_2$ sú rýchlosti loptičiek pred dopadom, $υ"_1, υ"_2$ sú rýchlosti loptičiek po dopade.
Po preštudovaní Newtonových zákonov vidíme, že s ich pomocou je možné vyriešiť základné problémy mechaniky, ak poznáme všetky sily pôsobiace na teleso. Sú situácie, v ktorých je ťažké alebo dokonca nemožné tieto hodnoty určiť. Zoberme si niekoľko takýchto situácií.Keď sa zrazia dve biliardové gule alebo autá, o pôsobiacich silách môžeme tvrdiť, že je to ich povaha, pôsobia tu elastické sily. Nebudeme však schopní presne určiť ani ich moduly, ani ich smer, najmä preto, že tieto sily majú extrémne krátke trvanie pôsobenia.S pohybom rakiet a prúdových lietadiel môžeme tiež povedať málo o silách, ktoré uviedli tieto telesá do pohybu.V takýchto prípadoch sa používajú metódy, ktoré umožňujú vyhnúť sa riešeniu pohybových rovníc a okamžite využiť dôsledky týchto rovníc. V tomto prípade sa zavádzajú nové fyzikálne veličiny. Zoberme si jednu z týchto veličín, nazývanú hybnosť tela
Šíp vystrelený z luku. Čím dlhšie pokračuje kontakt tetivy so šípom (∆t), tým väčšia je zmena hybnosti šípu (∆), a tým vyššia je jeho konečná rýchlosť.
Dve kolidujúce lopty. Keď sú gule v kontakte, pôsobia na seba silami rovnakej veľkosti, ako nás učí tretí Newtonov zákon. To znamená, že zmeny ich hybnosti musia byť rovnako veľké, aj keď hmotnosti guľôčok nie sú rovnaké.
Po analýze vzorcov možno vyvodiť dva dôležité závery:
1. Identické sily pôsobiace v rovnakom časovom období spôsobujú rovnaké zmeny hybnosti v rôznych telesách, bez ohľadu na ich hmotnosť.
2. Rovnakú zmenu hybnosti telesa možno dosiahnuť buď pôsobením malej sily počas dlhého časového úseku, alebo krátkym pôsobením veľkej sily na to isté teleso.
Podľa druhého Newtonovho zákona môžeme písať:
∆t = ∆ = ∆ / ∆t
Pomer zmeny hybnosti telesa k časovému úseku, počas ktorého k tejto zmene došlo, sa rovná súčtu síl pôsobiacich na teleso.
Po analýze tejto rovnice vidíme, že druhý Newtonov zákon nám umožňuje rozšíriť triedu problémov, ktoré treba vyriešiť, a zahrnúť problémy, v ktorých sa hmotnosť telies v priebehu času mení.
Ak sa pokúsime vyriešiť problémy s premenlivou hmotnosťou telies pomocou obvyklej formulácie druhého Newtonovho zákona:
potom by pokus o takéto riešenie viedol k chybe.
Príkladom toho je už spomínané prúdové lietadlo alebo vesmírna raketa, ktoré pri pohybe spaľujú palivo a splodiny tohto spaľovania sa uvoľňujú do okolitého priestoru. Prirodzene, hmotnosť lietadla alebo rakety klesá so spotrebou paliva.
Napriek tomu, že druhý Newtonov zákon v tvare „výsledná sila sa rovná súčinu hmotnosti telesa a jeho zrýchlenia“ nám umožňuje riešiť pomerne širokú triedu problémov, existujú prípady pohybu telies, ktoré nemožno plne opísané touto rovnicou. V takýchto prípadoch je potrebné použiť inú formuláciu druhého zákona, spájajúcu zmenu hybnosti telesa s impulzom výslednej sily. Okrem toho existuje množstvo problémov, v ktorých je riešenie pohybových rovníc matematicky mimoriadne náročné alebo dokonca nemožné. V takýchto prípadoch je pre nás užitočné použiť pojem hybnosť.
Pomocou zákona zachovania hybnosti a vzťahu medzi hybnosťou sily a hybnosťou telesa môžeme odvodiť druhý a tretí Newtonov zákon.
Druhý Newtonov zákon je odvodený zo vzťahu medzi impulzom sily a hybnosťou telesa.
Impulz sily sa rovná zmene hybnosti telesa:

Po vykonaní príslušných prenosov získame závislosť sily od zrýchlenia, pretože zrýchlenie je definované ako pomer zmeny rýchlosti k času, počas ktorého k tejto zmene došlo:

Nahradením hodnôt do nášho vzorca dostaneme vzorec pre druhý Newtonov zákon:
![]()
Na odvodenie tretieho Newtonovho zákona potrebujeme zákon zachovania hybnosti.
Vektory zdôrazňujú vektorovú povahu rýchlosti, to znamená skutočnosť, že rýchlosť sa môže meniť v smere. Po transformáciách dostaneme:

Keďže časový úsek v uzavretom systéme bol pre obe telesá konštantnou hodnotou, môžeme napísať:

Získali sme tretí Newtonov zákon: dve telesá na seba vzájomne pôsobia silami rovnakej veľkosti a opačného smeru. Vektory týchto síl sú nasmerované k sebe, respektíve moduly týchto síl majú rovnakú hodnotu.
Bibliografia
- Tikhomirova S.A., Yavorsky B.M. Fyzika (základná úroveň) - M.: Mnemosyne, 2012.
- Gendenshtein L.E., Dick Yu.I. Fyzika 10. ročník. - M.: Mnemosyne, 2014.
- Kikoin I.K., Kikoin A.K. Fyzika - 9, Moskva, Vzdelávanie, 1990.
Domáca úloha
- Definujte impulz telesa, impulz sily.
- Ako súvisí impulz telesa s impulzom sily?
- Aké závery možno vyvodiť zo vzorcov pre telesný impulz a silový impulz?
- Internetový portál Questions-physics.ru ().
- Internetový portál Frutmrut.ru ().
- Internetový portál Fizmat.by ().
Newtonove zákony umožňujú riešiť rôzne prakticky dôležité problémy týkajúce sa interakcie a pohybu telies. Veľký počet takýchto problémov je spojený napríklad so zisťovaním zrýchlenia pohybujúceho sa telesa, ak sú známe všetky sily pôsobiace na toto teleso. A potom sa pomocou zrýchlenia určujú ďalšie veličiny (okamžitá rýchlosť, zdvih a pod.).
Ale často je veľmi ťažké určiť sily pôsobiace na telo. Preto sa na vyriešenie mnohých problémov používa ďalšia dôležitá fyzikálna veličina – hybnosť tela.
- Hybnosť telesa p je vektorová fyzikálna veličina rovnajúca sa súčinu hmotnosti telesa a jeho rýchlosti
Hybnosť je vektorová veličina. Smer vektora hybnosti telesa sa vždy zhoduje so smerom vektora rýchlosti pohybu.
Jednotka impulzu SI je impulz telesa s hmotnosťou 1 kg, ktoré sa pohybuje rýchlosťou 1 m/s. To znamená, že jednotka SI hybnosti telesa je 1 kg m/s.
Pri výpočtoch použite rovnicu pre projekcie vektorov: р x = mv x.
V závislosti od smeru vektora rýchlosti vzhľadom na zvolenú os X môže byť projekcia vektora hybnosti kladná alebo záporná.
Slovo „impulz“ (impulsus) preložené z latinčiny znamená „tlačiť“. Niektoré knihy používajú termín „hybnosť“ namiesto termínu „impulz“.
Táto veličina bola zavedená do vedy približne v rovnakom období, keď Newton objavil zákony, ktoré boli neskôr pomenované po ňom (t. j. koncom 17. storočia).
Keď telá interagujú, ich impulzy sa môžu meniť. Dá sa to overiť jednoduchou skúsenosťou.
Dve guľôčky rovnakej hmotnosti sú zavesené na závitových slučkách z dreveného pravítka namontovaného na prstenci statívu, ako je znázornené na obrázku 44, a.
Ryža. 44. Ukážka zákona zachovania hybnosti
Gulička 2 sa odkloní od vertikály o uhol a (obr. 44, b) a uvoľní sa. Keď sa vráti do svojej predchádzajúcej pozície, zasiahne loptičku 1 a zastaví sa. V tomto prípade sa guľa 1 začne pohybovať a odchýli sa o rovnaký uhol a (obr. 44, c).
V tomto prípade je zrejmé, že v dôsledku vzájomného pôsobenia guľôčok sa hybnosť každej z nich zmenila: o koľko sa hybnosť gule 2 znížila, o rovnakú hodnotu vzrástla hybnosť gule 1.
Ak dve alebo viac telies interaguje iba medzi sebou (to znamená, že nie sú vystavené vonkajším silám), potom tieto telesá tvoria uzavretý systém.
Hybnosť každého z telies zahrnutých v uzavretom systéme sa môže meniť v dôsledku ich vzájomnej interakcie. ale
- vektorový súčet impulzov telies, ktoré tvoria uzavretý systém, sa pri žiadnych pohyboch a interakciách týchto telies v čase nemení
Toto je zákon zachovania hybnosti.
Zákon zachovania hybnosti je splnený aj vtedy, ak na telesá sústavy pôsobia vonkajšie sily, ktorých vektorový súčet je rovný nule. Ukážme si to pomocou druhého a tretieho Newtonovho zákona na odvodenie zákona zachovania hybnosti. Pre jednoduchosť uvažujme sústavu pozostávajúcu len z dvoch telies - gúľ s hmotnosťou m 1 a m 2, ktoré sa k sebe priamočiaro pohybujú rýchlosťami v 1 a v 2 (obr. 45).

Ryža. 45. Sústava dvoch telies - guľôčok pohybujúcich sa v priamom smere k sebe
Gravitačné sily pôsobiace na každú z loptičiek sú vyvážené pružnými silami povrchu, po ktorom sa odvaľujú. To znamená, že pôsobenie týchto síl možno ignorovať. Sily odporu voči pohybu sú v tomto prípade malé, preto nebudeme brať do úvahy ani ich vplyv. Môžeme teda predpokladať, že loptičky interagujú iba medzi sebou.
Z obrázku 45 je vidieť, že po určitom čase sa loptičky zrazia. Počas zrážky trvajúcej veľmi krátky časový úsek t vzniknú interakčné sily F 1 a F 2, pôsobiace na prvú a druhú guľu. V dôsledku pôsobenia síl sa bude meniť rýchlosť loptičiek. Rýchlosti guľôčok po zrážke označme písmenami v 1 a v 2 .
V súlade s tretím Newtonovým zákonom sú interakčné sily medzi loptičkami rovnako veľké a smerované v opačných smeroch:
Podľa druhého Newtonovho zákona môže byť každá z týchto síl nahradená súčinom hmotnosti a zrýchlenia prijatého každou z guľôčok počas interakcie:
m1a1 = -m2a2.
Zrýchlenia, ako viete, sú určené z rovnosti:

Nahradením síl zrýchlenia v rovnici zodpovedajúcimi výrazmi dostaneme:
![]()
V dôsledku zníženia oboch strán rovnosti o t dostaneme:
m1(v" 1 - v 1) = -m2 (v" 2 - v 2).
Zoskupujme členy tejto rovnice takto:
m 1 v 1 " + m 2 v 2 " = m 1 v 1 = m 2 v 2 . (1)
Vzhľadom na to, že mv = p, napíšeme rovnicu (1) v tomto tvare:
P" 1 + P" 2 = P 1 + P 2.(2)
Ľavé strany rovníc (1) a (2) predstavujú celkovú hybnosť loptičiek po ich interakcii a pravé strany predstavujú celkový impulz pred interakciou.
To znamená, že napriek tomu, že hybnosť každej z loptičiek sa počas interakcie menila, vektorový súčet ich hybnosti po interakcii zostal rovnaký ako pred interakciou.
Rovnice (1) a (2) sú matematickým vyjadrením zákona zachovania hybnosti.
Keďže tento kurz berie do úvahy iba interakcie telies pohybujúcich sa po jednej priamke, na napísanie zákona zachovania hybnosti v skalárnom tvare stačí jedna rovnica, ktorá zahŕňa projekcie vektorových veličín na os X:
m 1 v" 1x + m 2 v" 2x = m 1 v 1x + m 2 v 2x.
Otázky
- Čo je impulzom tela?
- Čo možno povedať o smeroch vektorov hybnosti a rýchlosti pohybujúceho sa telesa?
- Povedzte nám o priebehu experimentu znázornenom na obrázku 44. Čo to naznačuje?
- Čo znamená, keď sa povie, že niekoľko telies tvorí uzavretý systém?
- Formulujte zákon zachovania hybnosti.
- Pre uzavretý systém pozostávajúci z dvoch telies napíšte zákon zachovania hybnosti vo forme rovnice, ktorá by zahŕňala hmotnosti a rýchlosti týchto telies. Vysvetlite, čo znamenajú jednotlivé symboly v tejto rovnici.
Cvičenie 20
- Dve navíjacie autíčka, každé s hmotnosťou 0,2 kg, sa pohybujú v priamom smere k sebe. Rýchlosť každého auta voči zemi je 0,1 m/s. Sú impulzné vektory strojov rovnaké? impulzné vektorové moduly? Určte priemet hybnosti každého z áut na os X rovnobežne s ich trajektóriou.
- Ako veľmi sa zmení impulz auta s hmotnosťou 1 tony (v absolútnej hodnote), keď sa jeho rýchlosť zmení z 54 na 72 km/h?
- Muž sedí v člne odpočívajúcej na hladine jazera. V istom momente vstane a prejde od kormy k predku. Čo sa stane s loďou? Vysvetlite jav na základe zákona zachovania hybnosti.
- Železničný vozeň s hmotnosťou 35 ton sa priblíži k stojacemu vozňu s hmotnosťou 28 ton, ktorý stojí na tej istej koľaji, a automaticky sa s ním spojí. Po spojení sa autá pohybujú priamočiaro rýchlosťou 0,5 m/s. Aká bola rýchlosť 35-tonového auta pred spojkou?
