Themen des USE-Kodifikators: Impuls eines Körpers, Impuls eines Systems von Körpern, Impulserhaltungssatz.
Impuls Körper ist eine Vektorgröße, die gleich dem Produkt aus der Masse des Körpers und seiner Geschwindigkeit ist:
Es gibt keine speziellen Einheiten zur Messung des Impulses. Die Impulsdimension ist einfach das Produkt aus der Massendimension und der Geschwindigkeitsdimension:
Warum ist das Konzept des Momentums interessant? Es stellt sich heraus, dass es verwendet werden kann, um dem zweiten Newtonschen Gesetz eine etwas andere, ebenfalls äußerst nützliche Form zu geben.
Newtons zweites Gesetz in impulsiver Form
Sei die Resultierende der auf den Massenkörper ausgeübten Kräfte. Wir beginnen mit der üblichen Schreibweise des zweiten Newtonschen Gesetzes:
Da die Beschleunigung des Körpers gleich der Ableitung des Geschwindigkeitsvektors ist, wird Newtons zweites Gesetz wie folgt umgeschrieben:
Wir führen eine Konstante unter dem Vorzeichen der Ableitung ein:
Wie Sie sehen können, erhält man die Ableitung des Impulses auf der linken Seite:
. ( 1 )
Die Beziehung ( 1 ) ist eine neue Form des zweiten Newtonschen Gesetzes.
Newtons zweites Gesetz in impulsiver Form. Die Ableitung des Impulses eines Körpers ist die Resultierende der auf den Körper wirkenden Kräfte.
Wir können auch sagen: Die auf den Körper wirkende resultierende Kraft ist gleich der Änderungsrate des Impulses des Körpers.
Die Ableitung in der Formel (1) kann durch das Verhältnis der Endinkremente ersetzt werden:
. ( 2 )
In diesem Fall wirkt während des Zeitintervalls 10 eine mittlere Kraft auf den Körper. Je kleiner der Wert , desto enger die Beziehung zur Ableitung und desto näher die durchschnittliche Kraft an ihrem Momentanwert zu einem bestimmten Zeitpunkt.
Bei Aufgaben ist das Zeitintervall in der Regel recht klein. Zum Beispiel kann es der Zeitpunkt des Aufpralls des Balls auf die Wand sein und dann - die durchschnittliche Kraft, die während des Aufpralls von der Seite der Wand auf den Ball wirkt.
Der Vektor auf der linken Seite der Beziehung (2) wird aufgerufen Impuls ändern während . Die Impulsänderung ist die Differenz zwischen dem endgültigen und dem anfänglichen Impulsvektor. Wenn nämlich der Impuls des Körpers zu einem bestimmten Anfangszeitpunkt der Impuls des Körpers nach einer gewissen Zeit ist, dann ist die Änderung des Impulses die Differenz:
Wir betonen noch einmal, dass die Impulsänderung die Differenz der Vektoren ist (Abb. 1):
Lassen Sie zum Beispiel den Ball senkrecht zur Wand fliegen (der Impuls vor dem Aufprall ist ) und prallt ohne Geschwindigkeitsverlust zurück (der Impuls nach dem Aufprall ist ). Trotz der Tatsache, dass sich der Modulo-Impuls nicht geändert hat (), gibt es eine Impulsänderung:
Geometrisch ist diese Situation in Abb. 2:
Der Impulsänderungsmodul ist, wie wir sehen, gleich dem doppelten Modul des Anfangsimpulses der Kugel: .
Schreiben wir die Formel ( 2 ) wie folgt um:
, ( 3 )
oder schreiben Sie die Impulsänderung wie oben:
Der Wert wird aufgerufen Kraftimpuls. Für den Kraftimpuls gibt es keine spezielle Maßeinheit; die Dimension des Kraftimpulses ist einfach das Produkt der Dimensionen Kraft und Zeit:
(Beachten Sie, dass sich dies als eine weitere mögliche Maßeinheit für den Körperimpuls herausstellt.)
Die verbale Formulierung der Gleichheit ( 3 ) lautet wie folgt: Die Änderung des Impulses des Körpers ist gleich dem Impuls der Kraft, die für einen bestimmten Zeitraum auf den Körper wirkt. Dies ist natürlich wieder Newtons zweites Gesetz in impulsiver Form.
Beispiel für die Kraftberechnung
Betrachten wir als Beispiel für die Anwendung des zweiten Newtonschen Gesetzes in impulsiver Form das folgende Problem.
Aufgabe.
Ein horizontal fliegender Ball der Masse r mit einer Geschwindigkeit von m/s trifft auf eine glatte senkrechte Wand und prallt ohne Geschwindigkeitsverlust von dieser ab. Der Einfallswinkel der Kugel (d. h. der Winkel zwischen der Richtung der Kugel und der Senkrechten zur Wand) ist . Der Schlag dauert s. Finden Sie die durchschnittliche Stärke
während des Aufpralls auf den Ball einwirken.
Entscheidung. Zunächst zeigen wir, dass der Reflexionswinkel gleich dem Einfallswinkel ist, dh der Ball prallt im gleichen Winkel von der Wand ab (Abb. 3).
Nach (3) gilt: . Daraus folgt, dass sich der Impulsvektor ändert Co-Regie mit Vektor , d. h. senkrecht zur Wand auf den Rückprall des Balls gerichtet (Abb. 5).
 |
| Reis. 5. Zur Aufgabe |
Vektoren und
modulo gleich
(weil sich die Geschwindigkeit des Balls nicht geändert hat). Daher ist das Dreieck aus den Vektoren , und , gleichschenklig. Das bedeutet, dass der Winkel zwischen den Vektoren und gleich ist, dh der Reflexionswinkel ist tatsächlich gleich dem Einfallswinkel.
Beachten Sie nun zusätzlich, dass unser gleichschenkliges Dreieck einen Winkel hat (das ist der Einfallswinkel); also ist dieses Dreieck gleichseitig. Von hier:
Und dann die gewünschte mittlere auf die Kugel wirkende Kraft:
Impuls des Körpersystems
Beginnen wir mit einer einfachen Situation eines Zweikörpersystems. Es seien nämlich Körper 1 und Körper 2 mit Impulsen bzw. vorhanden. Der Impuls des Körperdatensystems ist die Vektorsumme der Impulse jedes Körpers:
Es stellt sich heraus, dass es für den Impuls eines Körpersystems eine dem zweiten Newtonschen Gesetz ähnliche Formel in der Form ( 1 ) gibt. Lassen Sie uns diese Formel herleiten.
Alle anderen Objekte, mit denen die betrachteten Körper 1 und 2 interagieren, werden wir nennen externe Stellen. Die Kräfte, mit denen äußere Körper auf die Körper 1 und 2 einwirken, werden als bezeichnet äußere Kräfte. Lassen Sie - die resultierende äußere Kraft, die auf Körper 1 wirkt. Ebenso - die resultierende äußere Kraft, die auf Körper 2 wirkt (Abb. 6).
Außerdem können die Körper 1 und 2 miteinander interagieren. Körper 2 mit Kraft auf Körper 1 einwirken lassen. Dann wirkt Körper 1 mit Kraft auf Körper 2 . Nach dem dritten Newtonschen Gesetz sind die Kräfte und betragsmäßig gleich und entgegengesetzt gerichtet: . Kräfte und ist innere Stärke, im System operieren.
Schreiben wir für jeden Körper 1 und 2 Newtons zweites Gesetz in der Form ( 1 ):
, ( 4 )
. ( 5 )
Fügen wir Gleichheiten ( 4 ) und ( 5 ) hinzu:
Auf der linken Seite der resultierenden Gleichheit steht die Summe der Ableitungen, die gleich der Ableitung der Summe der Vektoren und ist. Auf der rechten Seite haben wir aufgrund des dritten Newtonschen Gesetzes:
Aber - das ist der Impuls des Systems der Körper 1 und 2. Wir bezeichnen auch - das ist die Resultierende äußerer Kräfte, die auf das System einwirken. Wir bekommen:
. ( 6 )
Auf diese Weise, Die Änderungsrate des Impulses eines Systems von Körpern ist die Resultierende äußerer Kräfte, die auf das System einwirken. Gleichheit ( 6 ), die die Rolle des zweiten Newtonschen Gesetzes für das Körpersystem spielt, wollten wir erreichen.
Formel (6) wurde für den Fall von zwei Körpern hergeleitet. Lassen Sie uns nun unsere Argumentation auf den Fall einer beliebigen Anzahl von Körpern im System verallgemeinern.
Der Impuls des Systems der Körper Körper wird die Vektorsumme der Impulse aller im System enthaltenen Körper genannt. Wenn das System aus Körpern besteht, dann ist der Impuls dieses Systems gleich:
Dann wird alles genauso gemacht wie oben (nur technisch sieht es etwas komplizierter aus). Wenn wir für jeden Körper Gleichungen ähnlich ( 4 ) und ( 5 ) schreiben und dann alle diese Gleichungen addieren, dann erhalten wir auf der linken Seite wieder die Ableitung des Systemimpulses und auf der rechten Seite nur die Summe der äußeren Kräfte bleibt (innere Kräfte, die sich paarweise addieren, ergeben aufgrund des dritten Newtonschen Gesetzes Null). Daher bleibt Gleichheit (6) im allgemeinen Fall gültig.
Impulserhaltungssatz
Das Körpersystem heißt geschlossen wenn die Einwirkungen externer Körper auf die Körper eines gegebenen Systems entweder vernachlässigbar sind oder sich gegenseitig kompensieren. Bei einem geschlossenen System von Körpern ist also nur die Wechselwirkung dieser Körper untereinander wesentlich, nicht aber mit anderen Körpern.
Die Resultierende äußerer Kräfte, die auf ein geschlossenes System einwirken, ist gleich Null: . In diesem Fall erhalten wir aus (6):
Aber wenn die Ableitung des Vektors verschwindet (die Änderungsrate des Vektors ist Null), dann ändert sich der Vektor selbst nicht mit der Zeit:
Impulserhaltungssatz. Der Impuls eines geschlossenen Körpersystems bleibt für alle Wechselwirkungen von Körpern innerhalb dieses Systems über die Zeit konstant.
Die einfachsten Probleme zum Impulserhaltungssatz werden nach dem Standardschema gelöst, das wir nun zeigen werden.
Aufgabe. Ein Körper der Masse r bewegt sich mit einer Geschwindigkeit m/s auf einer glatten horizontalen Fläche. Ein Körper der Masse r bewegt sich mit einer Geschwindigkeit von m/s darauf zu. Es entsteht ein absolut unelastischer Stoß (die Körper verkleben). Finden Sie die Geschwindigkeit der Körper nach dem Aufprall.
Entscheidung. Die Situation ist in Abb. 7. Lassen Sie uns die Achse in die Bewegungsrichtung des ersten Körpers richten.
 |
| Reis. 7. Zur Aufgabe |
Da die Oberfläche glatt ist, gibt es keine Reibung. Da die Oberfläche horizontal ist und die Bewegung entlang dieser stattfindet, gleichen sich die Schwerkraft und die Reaktion des Trägers aus:
Somit ist die Vektorsumme der auf das System dieser Körper ausgeübten Kräfte gleich Null. Damit ist das Körpersystem geschlossen. Daher erfüllt es das Impulserhaltungsgesetz:
. ( 7 )
Der Impuls des Systems vor dem Aufprall ist die Summe der Impulse der Körper:
Nach einem inelastischen Stoß wurde ein Massekörper erhalten, der sich mit der gewünschten Geschwindigkeit bewegt:
Aus dem Impulserhaltungssatz ( 7 ) haben wir:
Von hier aus finden wir die Geschwindigkeit des nach dem Aufprall gebildeten Körpers:
Kommen wir zu den Projektionen auf der Achse:
Als Bedingung haben wir: m/s, m/s, so dass
Das Minuszeichen zeigt an, dass sich die klebrigen Körper in die entgegengesetzte Richtung zur Achse bewegen. Zielgeschwindigkeit: m/s.
Gesetz zur Erhaltung der Impulsprojektion
Die folgende Situation tritt häufig in Aufgaben auf. Das Körpersystem ist nicht geschlossen (die Vektorsumme der auf das System einwirkenden äußeren Kräfte ist ungleich Null), aber es gibt eine solche Achse, die Summe der Projektionen äußerer Kräfte auf die Achse ist Null zu jedem Zeitpunkt. Dann können wir sagen, dass sich unser Körpersystem entlang dieser Achse wie ein geschlossenes verhält und die Projektion des Impulses des Systems auf die Achse erhalten bleibt.
Lassen Sie uns das strenger zeigen. Gleichheit (6) auf die Achse projizieren:
Wenn die Projektion der resultierenden äußeren Kräfte verschwindet, dann
Daher ist die Projektion eine Konstante:
Erhaltungssatz der Impulsprojektion. Wenn die Projektion der Summe der auf das System wirkenden äußeren Kräfte auf die Achse gleich Null ist, dann ändert sich die Projektion des Impulses des Systems nicht mit der Zeit.
Schauen wir uns ein Beispiel für ein spezifisches Problem an, wie das Erhaltungsgesetz der Impulsprojektion funktioniert.
Aufgabe. Ein Massenjunge, der auf glattem Eis Schlittschuh läuft, wirft einen Massenstein mit Geschwindigkeit schräg zum Horizont. Finden Sie die Geschwindigkeit, mit der der Junge nach dem Wurf zurückrollt.
Entscheidung. Die Situation ist schematisch in Abb. acht . Der Junge ist als Rechteck dargestellt.
 |
| Reis. 8. Zur Aufgabe |
Die Dynamik des Systems "Junge + Stein" wird nicht konserviert. Dies ist zumindest daran zu erkennen, dass nach dem Wurf eine vertikale Impulskomponente des Systems auftritt (nämlich die vertikale Impulskomponente des Steins), die vor dem Wurf nicht vorhanden war.
Daher ist das System, das den Jungen und den Stein bildet, nicht geschlossen. Wieso den? Tatsache ist, dass die Vektorsumme der äußeren Kräfte während des Wurfs nicht gleich Null ist. Der Wert ist größer als die Summe, und aufgrund dieses Überschusses tritt gerade die vertikale Komponente des Systemimpulses auf.
Äußere Kräfte wirken jedoch nur vertikal (keine Reibung). Daher bleibt die Projektion des Impulses auf der horizontalen Achse erhalten. Vor dem Wurf war dieser Vorsprung gleich Null. Wenn wir die Achse in Richtung des Wurfs richten (so dass der Junge in Richtung der negativen Halbachse ging), erhalten wir.
Körper Schwung
Der Impuls eines Körpers ist eine Größe, die gleich dem Produkt aus der Masse des Körpers und seiner Geschwindigkeit ist.
Es sei daran erinnert, dass es sich um einen Körper handelt, der als materieller Punkt dargestellt werden kann. Der Impuls eines Körpers ($p$) wird auch Impuls genannt. Der Impulsbegriff wurde von René Descartes (1596-1650) in die Physik eingeführt. Später tauchte der Begriff „Impuls“ auf (Impulsus bedeutet im Lateinischen „Stoß“). Momentum ist eine Vektorgröße (wie Geschwindigkeit) und wird durch die Formel ausgedrückt:
$p↖(→)=mυ↖(→)$
Die Richtung des Impulsvektors fällt immer mit der Richtung der Geschwindigkeit zusammen.
Die Impulseinheit in SI ist der Impuls eines Körpers mit einer Masse von $1$ kg, der sich mit einer Geschwindigkeit von $1$ m/s bewegt, daher ist die Impulseinheit $1$ kg $·$ m/s.
Wirkt auf einen Körper (materieller Punkt) im Zeitintervall $∆t$ eine konstante Kraft, so ist auch die Beschleunigung konstant:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
wobei $(υ_1)↖(→)$ und $(υ_2)↖(→)$ die Anfangs- und Endgeschwindigkeiten des Körpers sind. Setzen wir diesen Wert in den Ausdruck des zweiten Newtonschen Gesetzes ein, erhalten wir:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Wenn wir die Klammern öffnen und den Ausdruck für den Impuls des Körpers verwenden, haben wir:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Dabei ist $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ die Impulsänderung über die Zeit $∆t$. Dann wird die vorherige Gleichung:
$∆p↖(→)=F↖(→)∆t$
Der Ausdruck $∆p↖(→)=F↖(→)∆t$ ist eine mathematische Darstellung des zweiten Newtonschen Gesetzes.
Das Produkt aus einer Kraft und ihrer Dauer heißt Moment der Kraft. So Die Impulsänderung eines Punktes ist gleich der Impulsänderung der auf ihn wirkenden Kraft.
Der Ausdruck $∆p↖(→)=F↖(→)∆t$ wird aufgerufen Körperbewegungsgleichung. Es sollte beachtet werden, dass die gleiche Wirkung – eine Änderung des Impulses eines Punktes – durch eine kleine Kraft in einem langen Zeitraum und durch eine große Kraft in einem kleinen Zeitraum erreicht werden kann.
Impuls des Systems tel. Gesetz der Impulsänderung
Der Impuls (Impuls) eines mechanischen Systems ist ein Vektor, der gleich der Summe der Impulse aller materiellen Punkte dieses Systems ist:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Die Gesetze der Änderung und der Impulserhaltung sind eine Folge des zweiten und dritten Newtonschen Gesetzes.
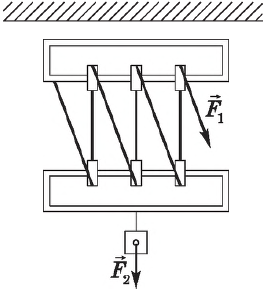
Stellen Sie sich ein System vor, das aus zwei Körpern besteht. Die Kräfte ($F_(12)$ und $F_(21)$ in der Abbildung, mit denen die Körper des Systems aufeinander einwirken, werden als innere Kräfte bezeichnet.
Auf das System wirken zusätzlich zu den inneren Kräften die äußeren Kräfte $(F_1)↖(→)$ und $(F_2)↖(→)$. Für jeden Körper kann die Gleichung $∆p↖(→)=F↖(→)∆t$ geschrieben werden. Wenn wir die linken und rechten Teile dieser Gleichungen addieren, erhalten wir:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Nach Newtons drittem Gesetz $(F_(12))↖(→)=-(F_(21))↖(→)$.
Somit,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
Auf der linken Seite ist die geometrische Summe der Impulsänderungen aller Körper des Systems, gleich der Impulsänderung des Systems selbst - $(∆p_(syst))↖(→)$ , die Gleichheit $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ kann geschrieben werden:
$(∆p_(sys))↖(→)=F↖(→)∆t$
wobei $F↖(→)$ die Summe aller äußeren Kräfte ist, die auf den Körper einwirken. Das erhaltene Ergebnis bedeutet, dass nur äußere Kräfte den Impuls des Systems ändern können und die Änderung des Impulses des Systems in die gleiche Richtung gerichtet ist wie die gesamte äußere Kraft. Dies ist die Essenz des Gesetzes der Änderung des Impulses eines mechanischen Systems.
Innere Kräfte können den Gesamtimpuls des Systems nicht ändern. Sie verändern nur die Impulse der einzelnen Körper des Systems.
Impulserhaltungssatz
Aus der Gleichung $(∆p_(syst))↖(→)=F↖(→)∆t$ folgt der Impulserhaltungssatz. Wirken keine äußeren Kräfte auf das System, so verschwindet die rechte Seite der Gleichung $(∆p_(syst))↖(→)=F↖(→)∆t$, was bedeutet, dass der Gesamtimpuls des Systems unverändert bleibt :
$(∆p_(sys))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Ein System, auf das keine äußeren Kräfte wirken oder die Resultierende äußerer Kräfte gleich Null ist, wird als System bezeichnet geschlossen.
Das Impulserhaltungsgesetz besagt:
Der Gesamtimpuls eines abgeschlossenen Systems von Körpern bleibt bei jeder Wechselwirkung der Körper des Systems untereinander konstant.
Das erhaltene Ergebnis gilt für ein System mit beliebig vielen Körpern. Wenn die Summe der äußeren Kräfte ungleich Null ist, aber die Summe ihrer Projektionen in eine Richtung gleich Null ist, ändert sich die Projektion des Impulses des Systems in diese Richtung nicht. So kann beispielsweise ein System von Körpern auf der Erdoberfläche aufgrund der auf alle Körper wirkenden Schwerkraft nicht als geschlossen betrachtet werden, die Summe der Projektionen von Impulsen in horizontaler Richtung kann jedoch unverändert bleiben (in Abwesenheit Reibung), da in dieser Richtung die Schwerkraft nicht gilt.
Strahlantrieb
Betrachten Sie Beispiele, die die Gültigkeit des Impulserhaltungsgesetzes bestätigen.
Nehmen wir einen Gummiballon für Kinder, blasen ihn auf und lassen ihn los. Wir werden sehen, dass der Ballon selbst in die andere Richtung fliegt, wenn die Luft in eine Richtung austritt. Die Bewegung des Balls ist ein Beispiel für Strahlantrieb. Es erklärt sich aus dem Impulserhaltungssatz: Der Gesamtimpuls des Systems "Ball plus Luft darin" vor dem Luftaustritt ist Null; er muss während der Bewegung gleich Null bleiben; daher bewegt sich die Kugel in der Richtung, die der Richtung des Strahlausflusses entgegengesetzt ist, und zwar mit einer solchen Geschwindigkeit, dass ihr Impuls im Absolutwert gleich dem Impuls des Luftstrahls ist.
Strahlantrieb wird die Bewegung eines Körpers genannt, die auftritt, wenn sich ein Teil davon mit einer bestimmten Geschwindigkeit von ihm trennt. Aufgrund des Impulserhaltungssatzes ist die Bewegungsrichtung des Körpers der Bewegungsrichtung des abgetrennten Teils entgegengesetzt.
Raketenflüge basieren auf dem Prinzip des Düsenantriebs. Eine moderne Weltraumrakete ist ein sehr komplexes Flugzeug. Die Masse der Rakete ist die Summe der Masse des Arbeitsmediums (d. h. heiße Gase, die bei der Verbrennung von Treibstoff entstehen und in Form eines Jetstreams ausgestoßen werden) und der endgültigen oder, wie sie sagen, „trockenen“ Masse der Rakete, die nach dem Ausstoß des Arbeitsfluids aus der Rakete zurückbleibt.
Wenn ein reaktiver Gasstrahl mit hoher Geschwindigkeit aus einer Rakete ausgestoßen wird, rast die Rakete selbst in die entgegengesetzte Richtung. Nach dem Impulserhaltungssatz muss der von der Rakete aufgenommene Impuls $m_(p)υ_p$ gleich dem Impuls $m_(gas) υ_(gas)$ der ausgestoßenen Gase sein:
$m_(p)υ_p=m_(Gas) υ_(Gas)$
Daraus folgt, dass die Geschwindigkeit der Rakete
$υ_p=((m_(Gas))/(m_p)) υ_(Gas)$
Aus dieser Formel ist ersichtlich, dass je größer die Geschwindigkeit der ausgestoßenen Gase und je größer das Verhältnis der Masse des Arbeitsfluids (d. h. der Masse des Brennstoffs) zur endgültigen („trockenen“) Masse der Rakete, die größer die Geschwindigkeit der Rakete.
Die Formel $υ_p=((m_(gas))/(m_p))·υ_(gas)$ ist ungefähr. Dabei wird nicht berücksichtigt, dass beim Verbrennen des Treibstoffs die Masse der fliegenden Rakete immer kleiner wird. Die genaue Formel für die Geschwindigkeit einer Rakete wurde 1897 von K. E. Tsiolkovsky erhalten und trägt seinen Namen.
Arbeit erzwingen
Der Begriff „Arbeit“ wurde 1826 von dem französischen Wissenschaftler J. Poncelet in die Physik eingeführt. Wenn im Alltag nur menschliche Arbeit als Arbeit bezeichnet wird, dann ist es in der Physik und insbesondere in der Mechanik allgemein anerkannt, dass Arbeit mit Gewalt verrichtet wird. Die physische Arbeitsmenge wird üblicherweise mit dem Buchstaben $A$ bezeichnet.
Arbeit erzwingen- Dies ist ein Maß für die Wirkung einer Kraft, abhängig von ihrem Modul und ihrer Richtung, sowie von der Verschiebung des Angriffspunkts der Kraft. Bei konstanter Kraft und geradliniger Bewegung wird die Arbeit durch die Gleichheit bestimmt:
$A=F|∆r↖(→)|cosα$
wobei $F$ die auf den Körper wirkende Kraft, $∆r↖(→)$ die Verschiebung, $α$ der Winkel zwischen Kraft und Verschiebung ist.

Die Arbeit der Kraft ist gleich dem Produkt aus Kraft- und Wegmodul und dem Kosinus des Winkels zwischen ihnen, also dem Skalarprodukt der Vektoren $F↖(→)$ und $∆r↖(→)$.
Arbeit ist eine skalare Größe. Wenn $α 0$ ist und wenn $90°
Wirken mehrere Kräfte auf einen Körper, so ist die Gesamtarbeit (die Summe der Arbeit aller Kräfte) gleich der Arbeit der resultierenden Kraft.
Die SI-Einheit der Arbeit ist Joule($1$J). $1$ J ist die Arbeit, die eine Kraft von $1$ N auf einem Weg von $1$ m in Richtung dieser Kraft verrichtet. Diese Einheit ist nach dem englischen Wissenschaftler J. Joule (1818-1889) benannt: $1$ J = $1$ N $·$ m. Oft werden auch Kilojoule und Millijoule verwendet: $1$ kJ $= 1.000$ J, $1$ mJ $ = 0,001 $ J.
Die Arbeit der Schwerkraft
Betrachten wir einen Körper, der entlang einer schiefen Ebene mit einem Neigungswinkel $α$ und einer Höhe $H$ gleitet.

Wir drücken $∆x$ durch $H$ und $α$ aus:
$∆x=(H)/(sinα)$
Bedenkt man, dass die Schwerkraft $F_т=mg$ einen Winkel ($90° - α$) mit der Bewegungsrichtung bildet, erhält man mit der Formel $∆x=(H)/(sin)α$ einen Ausdruck für die Arbeit der Schwerkraft $A_g$:
$A_g=mg cos(90°-α)(H)/(sinα)=mgH$
Aus dieser Formel ist ersichtlich, dass die Schwerkraftarbeit von der Höhe abhängt und nicht vom Neigungswinkel der Ebene.
Daraus folgt:
- die Arbeit der Schwerkraft hängt nicht von der Form der Bahn ab, entlang der sich der Körper bewegt, sondern nur von der Anfangs- und Endposition des Körpers;
- Wenn sich ein Körper entlang einer geschlossenen Bahn bewegt, ist die Schwerkraftarbeit Null, d.h. die Schwerkraft ist eine konservative Kraft (Kräfte mit dieser Eigenschaft werden konservativ genannt).
Die Arbeit der Reaktionskräfte, ist Null, weil die Reaktionskraft ($N$) senkrecht zur Verschiebung $∆x$ gerichtet ist.
Die Arbeit der Reibungskraft
Die Reibungskraft ist der Verschiebung $∆x$ entgegengerichtet und bildet mit ihr einen Winkel $180°$, die Arbeit der Reibungskraft ist also negativ:
$A_(tr)=F_(tr)∆x cos180°=-F_(tr) ∆x$
Da $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ dann
$A_(tr)=μmgHctgα$
Die Arbeit der elastischen Kraft
Auf eine ungedehnte Feder der Länge $l_0$ soll eine äußere Kraft $F↖(→)$ wirken, die sich um $∆l_0=x_0$ dehnt. In Position $x=x_0F_(control)=kx_0$. Nach Beendigung der Kraft $F↖(→)$ im Punkt $x_0$ wird die Feder unter der Wirkung der Kraft $F_(control)$ zusammengedrückt.

Bestimmen wir die Arbeit der elastischen Kraft, wenn sich die Koordinate des rechten Endes der Feder von $х_0$ auf $х$ ändert. Da sich die elastische Kraft in diesem Bereich linear ändert, kann im Hookeschen Gesetz ihr Mittelwert in diesem Bereich verwendet werden:
$F_(ex.av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Dann ist die Arbeit (unter Berücksichtigung der Tatsache, dass die Richtungen $(F_(exp.av.))↖(→)$ und $(∆x)↖(→)$ zusammenfallen) gleich:
$A_(exerc)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Es lässt sich zeigen, dass die Form der letzten Formel nicht vom Winkel zwischen $(F_(exp.av.))↖(→)$ und $(∆x)↖(→)$ abhängt. Die Arbeit der elastischen Kräfte hängt nur von den Verformungen der Feder im Anfangs- und Endzustand ab.
Somit ist die elastische Kraft wie die Schwerkraft eine konservative Kraft.
Macht der Kraft
Leistung ist eine physikalische Größe, die durch das Verhältnis von Arbeit zu der Zeit, in der sie erzeugt wird, gemessen wird.
Mit anderen Worten, die Leistung zeigt, wie viel Arbeit pro Zeiteinheit (in SI, für $1$ s) geleistet wird.
Die Leistung wird durch die Formel bestimmt:
wobei $N$ die Leistung ist, $A$ die in der Zeit $∆t$ verrichtete Arbeit.
Setzt man $A=F|(∆r)↖(→)|cosα$ in die Formel $N=(A)/(∆t)$ anstelle der Arbeit $A$ ein, erhält man:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Die Leistung ist gleich dem Produkt der Module der Kraft- und Geschwindigkeitsvektoren und dem Kosinus des Winkels zwischen diesen Vektoren.
Die Leistung im SI-System wird in Watt (W) gemessen. Ein Watt ($1$ W) ist die Leistung, bei der $1$ J Arbeit in $1$ s verrichtet wird: $1$ W $= 1$ J/s.
Benannt ist dieses Gerät nach dem englischen Erfinder J. Watt (Watt), der die erste Dampfmaschine baute. J. Watt selbst (1736-1819) verwendete eine andere Leistungseinheit – Pferdestärken (PS), die er einführte, um die Leistung einer Dampfmaschine und eines Pferdes vergleichen zu können: 1 $ PS. $= 735,5$
In der Technik werden oft größere Leistungseinheiten verwendet - Kilowatt und Megawatt: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
Kinetische Energie. Gesetz der Änderung der kinetischen Energie
Wenn ein Körper oder mehrere zusammenwirkende Körper (ein System von Körpern) Arbeit verrichten können, dann sagen sie, dass sie Energie haben.
Das Wort „Energie“ (von griech. energia – Handlung, Tätigkeit) wird im Alltag oft verwendet. So nennt man zum Beispiel Menschen, die schnell arbeiten können, energisch, mit großer Energie.
Die Energie, die ein Körper aufgrund von Bewegung besitzt, wird kinetische Energie genannt.
Wie bei der Definition von Energie im Allgemeinen können wir über kinetische Energie sagen, dass kinetische Energie die Fähigkeit eines sich bewegenden Körpers ist, Arbeit zu verrichten.
Finden wir die kinetische Energie eines Körpers der Masse $m$, der sich mit einer Geschwindigkeit von $υ$ bewegt. Da kinetische Energie die Energie aufgrund von Bewegung ist, ist der Nullzustand dafür der Zustand, in dem sich der Körper in Ruhe befindet. Nachdem wir die Arbeit gefunden haben, die notwendig ist, um dem Körper eine bestimmte Geschwindigkeit mitzuteilen, werden wir seine kinetische Energie finden.
Dazu berechnen wir die auf der Wegstrecke $∆r↖(→)$ geleistete Arbeit, wenn die Richtungen der Kraftvektoren $F↖(→)$ und Weg $∆r↖(→)$ übereinstimmen. In diesem Fall ist die Arbeit
wobei $∆x=∆r$

Für die Bewegung eines Punktes mit der Beschleunigung $α=const$ hat der Bewegungsausdruck die Form:
$∆x=υ_1t+(at^2)/(2),$
wobei $υ_1$ die Anfangsgeschwindigkeit ist.
Setzen wir den Ausdruck für $∆x$ von $∆x=υ_1t+(at^2)/(2)$ in die Gleichung $A=F ∆x$ ein und verwenden das zweite Newtonsche Gesetz $F=ma$, erhalten wir:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Ausdrücken der Beschleunigung in Form von $υ_1$ Anfangs- und $υ_2$ Endgeschwindigkeiten $a=(υ_2-υ_1)/(t)$ und Einsetzen in $A=ma(υ_1t+(at^2)/(2))=( mat)/ (2)(2υ_1+at)$ haben wir:
$A=(m(υ_2-υ_1))/(2) (2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Setzen wir nun die Anfangsgeschwindigkeit gleich Null: $υ_1=0$, erhalten wir einen Ausdruck für kinetische Energie:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Ein sich bewegender Körper hat also kinetische Energie. Diese Energie entspricht der Arbeit, die verrichtet werden muss, um die Geschwindigkeit des Körpers von Null auf $υ$ zu erhöhen.
Aus $E_K=(mυ)/(2)=(p^2)/(2m)$ folgt, dass die Arbeit einer Kraft, um einen Körper von einer Position zur anderen zu bewegen, gleich der Änderung der kinetischen Energie ist:
$A=E_(K_2)-E_(K_1)=∆E_K$
Die Gleichheit $A=E_(K_2)-E_(K_1)=∆E_K$ drückt aus Satz über die Änderung der kinetischen Energie.
Änderung der kinetischen Energie des Körpers(Stoffpunkt) für eine bestimmte Zeit ist gleich der Arbeit, die in dieser Zeit durch die auf den Körper einwirkende Kraft verrichtet wird.
Potenzielle Energie
Potenzielle Energie ist die Energie, die durch die gegenseitige Anordnung von wechselwirkenden Körpern oder Teilen desselben Körpers bestimmt wird.
Da Energie als die Fähigkeit eines Körpers definiert ist, Arbeit zu leisten, wird potentielle Energie natürlich als die Arbeit einer Kraft definiert, die nur von der relativen Position der Körper abhängt. Dies ist die Schwerkraftarbeit $A=mgh_1-mgh_2=mgH$ und die Elastizitätsarbeit:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Die potentielle Energie des Körpers Wechselwirkung mit der Erde heißt der Wert gleich dem Produkt aus der Masse $m$ dieses Körpers und der Fallbeschleunigung $g$ und der Höhe $h$ des Körpers über der Erdoberfläche:
Die potentielle Energie eines elastisch verformten Körpers ist gleich dem halben Produkt aus dem Elastizitätskoeffizienten (Steifigkeit) $k$ des Körpers und dem Verformungsquadrat $∆l$:
$E_p=(1)/(2)k∆l^2$
Die Arbeit konservativer Kräfte (Schwerkraft und Elastizität) unter Berücksichtigung von $E_p=mgh$ und $E_p=(1)/(2)k∆l^2$ wird wie folgt ausgedrückt:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Diese Formel erlaubt uns, eine allgemeine Definition der potentiellen Energie zu geben.
Die potentielle Energie des Systems ist eine von der Position der Körper abhängige Größe, deren Änderung beim Übergang des Systems vom Anfangszustand in den Endzustand gleich der Arbeit der inneren konservativen Kräfte des Systems ist, mit umgekehrtem Vorzeichen aufgenommen.
Das Minuszeichen auf der rechten Seite der Gleichung $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ bedeutet, dass bei der Arbeit durch Schnittgrößen ( B. fallende Körper unter der Wirkung der Schwerkraft im "Stein-Erde"-System), nimmt die Energie des Systems ab. Arbeit und Änderung der potentiellen Energie in einem System haben immer entgegengesetzte Vorzeichen.
Da die Arbeit nur die Änderung der potentiellen Energie bestimmt, hat in der Mechanik nur die Energieänderung physikalische Bedeutung. Daher ist die Wahl des Nullenergieniveaus willkürlich und wird ausschließlich durch Bequemlichkeitserwägungen bestimmt, beispielsweise die Einfachheit des Schreibens der entsprechenden Gleichungen.
Das Gesetz der Veränderung und Erhaltung der mechanischen Energie
Gesamte mechanische Energie des Systems die Summe seiner kinetischen und potentiellen Energien heißt:
Sie wird durch die Position der Körper (potenzielle Energie) und ihre Geschwindigkeit (kinetische Energie) bestimmt.
Nach dem Satz über die kinetische Energie gilt
$E_k-E_(k_1)=A_p+A_(pr),$
wobei $А_р$ die Arbeit potentieller Kräfte ist, $А_(pr)$ die Arbeit nicht-potentieller Kräfte.
Die Arbeit der potentiellen Kräfte wiederum ist gleich der Differenz der potentiellen Energie des Körpers im Anfangszustand $E_(p_1)$ und im Endzustand $E_p$. Vor diesem Hintergrund erhalten wir einen Ausdruck für das Gesetz der Änderung der mechanischen Energie:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
wobei die linke Seite der Gleichheit die Änderung der gesamten mechanischen Energie und die rechte Seite die Arbeit nicht-potentieller Kräfte ist.
So, Gesetz der Änderung der mechanischen Energie liest:
Die Änderung der mechanischen Energie des Systems ist gleich der Arbeit aller nicht-potentiellen Kräfte.
Ein mechanisches System, in dem nur potentielle Kräfte wirken, nennt man konservativ.
In einem konservativen System ist $A_(pr) = 0$. dies impliziert Erhaltungssatz der mechanischen Energie:
In einem geschlossenen konservativen System bleibt die gesamte mechanische Energie erhalten (ändert sich nicht mit der Zeit):
$E_k+E_p=E_(k_1)+E_(p_1)$
Der Erhaltungssatz der mechanischen Energie leitet sich aus den Gesetzen der Newtonschen Mechanik ab, die auf ein System materieller Punkte (oder Makroteilchen) anwendbar sind.
Der Erhaltungssatz der mechanischen Energie gilt aber auch für ein System von Mikropartikeln, wo die Newtonschen Gesetze selbst nicht mehr gelten.
Der Erhaltungssatz der mechanischen Energie ist eine Folge der Homogenität der Zeit.
Einheitlichkeit der Zeit ist, dass bei gleichen Anfangsbedingungen der Ablauf physikalischer Prozesse nicht davon abhängt, in welchem Moment diese Bedingungen geschaffen werden.
Das Gesetz der Erhaltung der gesamten mechanischen Energie bedeutet, dass sich bei einer Änderung der kinetischen Energie in einem konservativen System auch seine potentielle Energie ändern muss, damit ihre Summe konstant bleibt. Darunter versteht man die Möglichkeit, eine Energieart in eine andere umzuwandeln.
Entsprechend den verschiedenen Bewegungsformen der Materie werden verschiedene Arten von Energie betrachtet: mechanisch, intern (gleich der Summe der kinetischen Energie der chaotischen Bewegung von Molekülen relativ zum Massenmittelpunkt des Körpers und der potentiellen Energie der Wechselwirkung von Molekülen untereinander), elektromagnetische, chemische (die aus der kinetischen Energie der Bewegung von Elektronen und elektrische Energie ihrer Wechselwirkung untereinander und mit Atomkernen besteht), Kernenergie usw. Es kann aus der gesehen werden Vorweg, dass die Aufteilung der Energie in verschiedene Arten eher willkürlich ist.
Naturphänomene gehen in der Regel mit der Umwandlung einer Energieart in eine andere einher. So führt beispielsweise die Reibung von Teilen verschiedener Mechanismen zur Umwandlung mechanischer Energie in Wärme, d.h. in innere Energie. Bei Wärmekraftmaschinen hingegen wird innere Energie in mechanische Energie umgewandelt; in galvanischen zellen wird chemische energie in elektrische energie umgewandelt usw.
Derzeit ist der Energiebegriff einer der Grundbegriffe der Physik. Dieses Konzept ist untrennbar mit der Idee der Transformation einer Bewegungsform in eine andere verbunden.
So wird der Energiebegriff in der modernen Physik formuliert:
Energie ist ein allgemeines quantitatives Maß für die Bewegung und Wechselwirkung aller Arten von Materie. Energie entsteht nicht aus dem Nichts und verschwindet nicht, sie kann nur von einer Form in eine andere übergehen. Der Energiebegriff verbindet alle Phänomene der Natur.
einfache Mechanismen. Effizienz des Mechanismus
Einfache Mechanismen sind Geräte, die die Größe oder Richtung der auf den Körper ausgeübten Kräfte ändern.
Sie werden verwendet, um große Lasten mit geringem Kraftaufwand zu bewegen oder zu heben. Dazu gehören der Hebel und seine Varianten - Blöcke (beweglich und fest), ein Tor, eine schiefe Ebene und ihre Varianten - ein Keil, eine Schraube usw.
Hebelarm. Hebelregel
Der Hebel ist ein starrer Körper, der sich um einen festen Träger drehen kann.

Die Leverage-Regel besagt:
Ein Hebel befindet sich im Gleichgewicht, wenn die auf ihn wirkenden Kräfte umgekehrt proportional zu ihren Armen sind:
$(F_2)/(F_1)=(l_1)/(l_2)$
Aus der Formel $(F_2)/(F_1)=(l_1)/(l_2)$ unter Anwendung der Proportionseigenschaft (das Produkt der äußersten Terme des Anteils ist gleich dem Produkt seiner mittleren Terme), wir kann die folgende Formel erhalten:
Aber $F_1l_1=M_1$ ist das Kraftmoment, das dazu neigt, den Hebel im Uhrzeigersinn zu drehen, und $F_2l_2=M_2$ ist das Kraftmoment, das dazu neigt, den Hebel gegen den Uhrzeigersinn zu drehen. Also $M_1=M_2$, was zu beweisen war.
Der Hebel wurde schon in der Antike von Menschen benutzt. Mit seiner Hilfe war es möglich, beim Bau der Pyramiden im alten Ägypten schwere Steinplatten anzuheben. Ohne Leverage wäre dies nicht möglich gewesen. Immerhin wurden beispielsweise für den Bau der Cheops-Pyramide, die eine Höhe von 147 $ m hat, mehr als zwei Millionen Steinblöcke verwendet, von denen der kleinste eine Masse von 2,5 $ Tonnen hatte!
Hebel sind heute sowohl in der Produktion (z. B. Kräne) als auch im Alltag (Scheren, Drahtschneider, Waagen) weit verbreitet.
Fester Block
Die Wirkungsweise eines festen Blocks ähnelt der Wirkungsweise eines Hebels mit gleicher Hebelwirkung: $l_1=l_2=r$. Die aufgebrachte Kraft $F_1$ ist gleich der Last $F_2$, und die Gleichgewichtsbedingung ist:
Fester Block Wird verwendet, wenn Sie die Richtung einer Kraft ändern müssen, ohne ihre Größe zu ändern.
Beweglicher Block
Der bewegliche Block wirkt ähnlich wie ein Hebel, dessen Arme sind: $l_2=(l_1)/(2)=r$. Die Gleichgewichtsbedingung hat in diesem Fall die Form:
wobei $F_1$ die aufgebrachte Kraft ist, $F_2$ die Last. Die Verwendung eines beweglichen Blocks führt zu einem doppelten Kraftgewinn.
Polyspast (Blocksystem)
Ein gewöhnlicher Kettenzug besteht aus $n$ beweglichen und $n$ festen Blöcken. Die Anwendung ergibt einen Kraftgewinn von $2n$-mal:
$F_1=(F_2)/(2n)$
Kraftkettenzug besteht aus n beweglichen und einem festen Block. Die Verwendung eines Kettenzugs ergibt einen Kraftzuwachs von $2^n$ mal:
$F_1=(F_2)/(2^n)$

Schraube
Die Schraube ist eine um die Achse gewickelte schiefe Ebene.

Die Bedingung für das Kräftegleichgewicht an der Schraube hat die Form:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

wobei $F_1$ eine externe Kraft ist, die auf die Schraube wirkt und in einem Abstand $R$ von ihrer Achse wirkt; $F_2$ ist die in Richtung der Schraubenachse wirkende Kraft; $h$ - Schraubensteigung; $r$ ist der durchschnittliche Gewinderadius; $α$ ist der Gewindewinkel. $R$ ist die Länge des Hebels (Schraubenschlüssels), der die Schraube mit der Kraft $F_1$ dreht.
Effizienz
Leistungskoeffizient (COP) - das Verhältnis der nützlichen Arbeit zur gesamten aufgewendeten Arbeit.
Die Effizienz wird oft in Prozent ausgedrückt und mit dem griechischen Buchstaben $η$ ("dies") bezeichnet:
$η=(A_p)/(A_3) 100%$
wobei $A_n$ nützliche Arbeit ist, $A_3$ die gesamte aufgewendete Arbeit.
Nutzarbeit ist immer nur ein Teil der Gesamtarbeit, die eine Person mit diesem oder jenem Mechanismus aufwendet.
Ein Teil der geleisteten Arbeit wird für die Überwindung der Reibungskräfte aufgewendet. Da $А_3 > А_п$, ist die Effizienz immer kleiner als $1$ (oder $< 100%$).
Da jede der Arbeiten in dieser Gleichung als Produkt aus der entsprechenden Kraft und dem zurückgelegten Weg ausgedrückt werden kann, kann sie wie folgt umgeschrieben werden: $F_1s_1≈F_2s_2$.
Daraus folgt, Wenn wir mit Hilfe des geltenden Mechanismus gewinnen, verlieren wir auf dem Weg die gleiche Anzahl von Malen und umgekehrt. Dieses Gesetz wird die goldene Regel der Mechanik genannt.
Die goldene Regel der Mechanik ist ein ungefähres Gesetz, da sie die Arbeit zur Überwindung von Reibung und Schwerkraft der Teile der verwendeten Geräte nicht berücksichtigt. Dennoch kann es sehr nützlich sein, wenn die Funktionsweise eines einfachen Mechanismus analysiert wird.

So können wir zum Beispiel dank dieser Regel sofort sagen, dass der in der Abbildung gezeigte Arbeiter mit einem doppelten Gewinn an Hubkraft von $ 10 $ cm das gegenüberliegende Ende des Hebels um $ 20 $ cm senken muss.
Kollision von Körpern. Elastische und unelastische Stöße
Zur Lösung des Problems der Bewegung von Körpern nach einer Kollision werden die Erhaltungssätze von Impuls und mechanischer Energie verwendet: Die bekannten Impulse und Energien vor der Kollision werden verwendet, um die Werte dieser Größen nach der Kollision zu bestimmen. Betrachten Sie die Fälle elastischer und unelastischer Stöße.
Es wird ein absolut unelastischer Stoß genannt, wonach die Körper einen einzigen Körper bilden, der sich mit einer bestimmten Geschwindigkeit bewegt. Das Problem der Geschwindigkeit des letzteren wird mit dem Impulserhaltungssatz für ein System von Körpern mit den Massen $m_1$ und $m_2$ (wenn es sich um zwei Körper handelt) vor und nach dem Stoß gelöst:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Offensichtlich bleibt die kinetische Energie von Körpern bei einem inelastischen Stoß nicht erhalten (z. B. bei $(υ_1)↖(→)=-(υ_2)↖(→)$ und $m_1=m_2$ wird sie nach dem gleich Null Einschlag).
Man spricht von einem absolut elastischen Stoß, bei dem nicht nur die Summe der Impulse erhalten bleibt, sondern auch die Summe der kinetischen Energien der kollidierenden Körper.
Für einen absolut elastischen Stoß gelten die Gleichungen
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2 )^2)/(2)$
wobei $m_1, m_2$ die Massen der Kugeln, $υ_1, υ_2$ die Geschwindigkeiten der Kugeln vor dem Aufprall, $υ"_1, υ"_2$ die Geschwindigkeiten der Kugeln nach dem Aufprall sind.
Kraftimpuls und Impuls des Körpers
Wie gezeigt, kann das zweite Newtonsche Gesetz geschrieben werden als
Ft=mv-mv o=p-p o=D p.
Die Vektorgröße Ft, gleich dem Produkt aus der Kraft und der Zeit ihrer Wirkung, wird aufgerufen Moment der Kraft. Man nennt die Vektorgröße p=mv, die gleich dem Produkt aus der Masse des Körpers und seiner Geschwindigkeit ist Körper Schwung.
In SI ist die Einheit des Impulses der Impuls eines Körpers mit einer Masse von 1 kg, der sich mit einer Geschwindigkeit von 1 m/s bewegt, d.h. die Einheit des Impulses ist Kilogrammmeter pro Sekunde (1 kg m/s).
Die Änderung des Impulses des Körpers D p über die Zeit t ist gleich dem Impuls der in dieser Zeit auf den Körper wirkenden Kraft Ft.
Das Konzept des Impulses ist eines der grundlegenden Konzepte der Physik. Der Impuls eines Körpers ist eine der Größen, die unter bestimmten Bedingungen seinen Wert unverändert beibehalten können.(aber modulo und in Richtung).
Erhaltung des Gesamtimpulses eines abgeschlossenen Systems
geschlossenes System Nennen Sie eine Gruppe von Körpern, die nicht mit anderen Körpern interagieren, die nicht Teil dieser Gruppe sind. Die Wechselwirkungskräfte zwischen Körpern in einem geschlossenen System werden genannt intern. (Schnittkräfte werden üblicherweise mit dem Buchstaben f bezeichnet).
Betrachten Sie die Interaktion von Körpern in einem geschlossenen System. Lassen Sie zwei Kugeln gleichen Durchmessers, die aus unterschiedlichen Stoffen bestehen (d. h. unterschiedliche Massen haben), auf einer vollkommen glatten horizontalen Oberfläche rollen und miteinander kollidieren. Beim Aufprall, den wir als zentral und absolut elastisch betrachten wollen, ändern sich die Geschwindigkeiten und Impulse der Kugeln. Die Masse der ersten Kugel m 1 , ihre Geschwindigkeit vor dem Aufprall V 1 und nach dem Aufprall V 1 "; die Masse der zweiten Kugel m 2 , ihre Geschwindigkeit vor dem Aufprall v 2 , nach dem Aufprall v 2 ". Nach dem dritten Newtonschen Gesetz sind die Wechselwirkungskräfte zwischen den Kugeln betragsmäßig gleich und entgegengesetzt gerichtet, d.h. f 1 \u003d -f 2.
Nach dem zweiten Newtonschen Gesetz ist die Änderung des Impulses der Kugeln infolge ihres Zusammenstoßes gleich dem Impuls der Wechselwirkungskräfte zwischen ihnen, d.h.
m 1 v 1 "-m 1 v 1 \u003d f 1 t (3.1)
m 2 v 2 "-m 2 v 2 \u003d f 2 t (3.2)
wobei t die Wechselwirkungszeit der Kugeln ist.
Wenn wir die Ausdrücke (3.1) und (3.2) Term für Term addieren, finden wir das
m 1 v 1 "-m 1 v 1 + m 2 v 2 "-m 2 v 2 \u003d 0.
Somit,
m 1 v 1 "+ m 2 v 2" \u003d m 1 v 1 + m 2 v 2
oder andernfalls
p 1 "+p 2" \u003d p 1 + p 2. (3.3)
Lassen Sie uns p 1 "+p 2 "=p" und p 1 +p 2 =p bezeichnen.
Die Vektorsumme der Impulse aller im System enthaltenen Körper wird aufgerufen vollen Impuls dieses Systems. Aus (3.3) ist ersichtlich, dass p "= p, d. H. p" - p \u003d D p \u003d 0, daher
p=p 1 + p 2 = konst.
Formel (3.4) drückt aus Gesetz der Impulserhaltung in einem abgeschlossenen System, die wie folgt formuliert ist: der Gesamtimpuls eines abgeschlossenen Systems von Körpern bleibt für alle Wechselwirkungen der Körper dieses Systems untereinander konstant.
Mit anderen Worten, innere Kräfte können den Gesamtimpuls des Systems weder im Betrag noch in der Richtung ändern.
Änderung des Gesamtimpulses eines offenen Systems
Eine Gruppe von Körpern, die nicht nur untereinander interagieren, sondern auch mit Körpern, die nicht Teil dieser Gruppe sind, wird als bezeichnet offenes System. Die Kräfte, mit denen Körper, die nicht in diesem System enthalten sind, auf die Körper eines bestimmten Systems einwirken, werden als äußere Kräfte bezeichnet (normalerweise werden äußere Kräfte mit dem Buchstaben F bezeichnet).
Betrachten Sie die Wechselwirkung zweier Körper in einem offenen System. Die Änderung der Impulse dieser Körper erfolgt sowohl unter Einwirkung innerer Kräfte als auch unter Einwirkung äußerer Kräfte.
Nach dem zweiten Newtonschen Gesetz sind die Änderungen der Impulse der betrachteten Körper für den ersten und zweiten Körper
D p 1 \u003d f 1 t + F 1 t (3,5)
D p 2 \u003d f 2 t + F 2 t (3,6)
wobei t die Einwirkungszeit äußerer und innerer Kräfte ist.
Wenn wir die Ausdrücke (3.5) und (3.6) Term für Term addieren, finden wir das
D (p 1 + p 2) = (f 1 + f 2)t + (F 1 + F 2)t (3.7)
In dieser Formel ist p \u003d p 1 + p 2 - der Gesamtimpuls des Systems, f 1 + f 2 \u003d 0 (da nach Newtons drittem Gesetz (f 1 \u003d -f 2) F 1 + F 2 \u003d F ist die Resultierende aller äußeren Kräfte , die auf die Körper des gegebenen Systems einwirken Angesichts des Gesagten nimmt die Formel (3.7) die Form an
Dp=Ft. (3.8)
Aus (3.8) sieht man das der Gesamtimpuls des Systems ändert sich nur unter Einwirkung äußerer Kräfte. Wenn das System geschlossen ist, also F=0, dann ist D p=0 und folglich p=const. Formel (3.4) ist also ein Spezialfall von Formel (3.8), die zeigt, unter welchen Bedingungen der Gesamtimpuls des Systems erhalten bleibt und unter welchen Bedingungen er sich ändert.
Strahlantrieb.
Die Bedeutung von Tsiolkovskys Arbeit für die Raumfahrt
Die Bewegung eines Körpers, die durch die Trennung eines Teils seiner Masse von ihm mit einer bestimmten Geschwindigkeit auftritt, wird als bezeichnet reaktiv.
Alle Arten von Bewegung, mit Ausnahme der reaktiven, sind ohne das Vorhandensein von Kräften außerhalb eines gegebenen Systems unmöglich, d.h. ohne die Wechselwirkung der Körper dieses Systems mit der Umgebung, und Für die Umsetzung des Strahlantriebs ist die Interaktion des Körpers mit der Umgebung nicht erforderlich. Das System befindet sich zunächst in Ruhe, d.h. sein Gesamtimpuls ist Null. Wenn bei einer bestimmten Geschwindigkeit ein Teil seiner Masse aus dem System herausgeschleudert wird, dann (da der Gesamtimpuls eines abgeschlossenen Systems nach dem Impulserhaltungssatz unverändert bleiben muss) erhält das System eine nach innen gerichtete Geschwindigkeit die andere Richtung. In der Tat, da m 1 v 1 + m 2 v 2 \u003d 0, dann m 1 v 1 \u003d -m 2 v 2, d.h.
v 2 \u003d -v 1 m 1 / m 2.
Aus dieser Formel folgt, dass die von einem System mit der Masse m 2 erhaltene Geschwindigkeit v 2 von der ausgestoßenen Masse m 1 und der Geschwindigkeit v 1 ihres Ausstoßes abhängt.
Eine Wärmekraftmaschine, bei der die Schubkraft, die durch die Reaktion eines Strahls emittierter heißer Gase entsteht, direkt auf ihren Körper ausgeübt wird, wird als Strahltriebwerk bezeichnet. Im Gegensatz zu anderen Fahrzeugen kann sich ein Jet-angetriebenes Gerät durch den Weltraum bewegen.
Der Begründer der Theorie der Raumflüge ist der herausragende russische Wissenschaftler Tsiolkovsky (1857 - 1935). Er legte die allgemeinen Grundlagen der Theorie des Düsenantriebs vor, entwickelte die Grundprinzipien und Schemata von Düsenflugzeugen und bewies die Notwendigkeit der Verwendung einer mehrstufigen Rakete für interplanetare Flüge. Tsiolkovskys Ideen wurden in der UdSSR beim Bau von künstlichen Erdsatelliten und Raumfahrzeugen erfolgreich umgesetzt.
Der Begründer der praktischen Raumfahrt ist der sowjetische Wissenschaftler Akademiker Korolev (1906 - 1966). Unter seiner Führung wurde der weltweit erste künstliche Satellit der Erde geschaffen und gestartet, der erste bemannte Raumflug in der Geschichte der Menschheit fand statt. Der erste Kosmonaut der Erde war der Sowjetmann Yu.A. Gagarin (1934 - 1968).
Fragen zur Selbstkontrolle:
- Wie wird Newtons zweites Gesetz in impulsiver Form geschrieben?
- Was heißt Kraftimpuls? Körper Schwung?
- Welches System von Körpern wird geschlossen genannt?
- Was nennt man innere Kräfte?
- Zeigen Sie am Beispiel der Wechselwirkung zweier Körper in einem abgeschlossenen System, wie sich der Impulserhaltungssatz aufstellt. Wie ist es formuliert?
- Wie groß ist der Gesamtimpuls eines Systems?
- Können innere Kräfte den Gesamtimpuls des Systems verändern?
- Welches Körpersystem heißt offen?
- Welche Kräfte nennt man äußerlich?
- Stellen Sie eine Formel auf, die zeigt, unter welchen Bedingungen sich der Gesamtimpuls des Systems ändert und unter welchen Bedingungen er erhalten bleibt.
- Was ist eine reaktive Bewegung?
- Kann es ohne die Wechselwirkung des sich bewegenden Körpers mit der Umgebung geschehen?
- Was ist das Gesetz des Strahlantriebs?
- Welche Bedeutung hat Tsiolkovskys Arbeit für die Raumfahrt?
Wenn auf einem Körper der Masse m für eine bestimmte Zeit Δ t die Kraft F → wirkt, dann folgt die Geschwindigkeitsänderung des Körpers ∆ v → = v 2 → - v 1 →. Das bekommen wir während der Zeit Δ t Der Körper bewegt sich mit Beschleunigung weiter:
a → = ∆ v → ∆ t = v 2 → - v 1 → ∆ t .
Basierend auf dem Grundgesetz der Dynamik, also dem zweiten Newtonschen Gesetz, haben wir:
F → = m a → = m v 2 → - v 1 → ∆ t oder F → ∆ t = m v 2 → - m v 1 → = m ∆ v → = ∆ m v → .
Bestimmung 1Körper Schwung, oder Menge an Bewegung ist eine physikalische Größe, die gleich dem Produkt aus der Masse des Körpers und der Geschwindigkeit seiner Bewegung ist.
Der Impuls eines Körpers wird als vektorielle Größe betrachtet, die in Kilogramm-Meter pro Sekunde (k g m / s) gemessen wird.
Bestimmung 2
Kraftimpuls ist eine physikalische Größe gleich dem Produkt aus der Kraft und der Zeit ihrer Einwirkung.
Impulse werden als Vektorgrößen bezeichnet. Es gibt eine andere Formulierung der Definition.
Bestimmung 3
Die Impulsänderung des Körpers ist gleich dem Impuls der Kraft.
Mit Impuls bezeichnet p → Newtons zweites Gesetz wird geschrieben als:
F → ∆t = ∆p → .
Diese Form erlaubt uns, das zweite Newtonsche Gesetz zu formulieren. Kraft F → ist die Resultierende aller auf den Körper wirkenden Kräfte. Gleichheit wird als Projektion auf die Koordinatenachsen der Ansicht geschrieben:
F x Δ t = Δ p x ; F y ∆t = ∆p y ; Fz ∆t = ∆pz .
Bild 1 . Sechszehn . ein . Körperimpulsmodell.
Die Änderung der Projektion des Körperimpulses auf eine der drei zueinander senkrechten Achsen ist gleich der Projektion des Kraftimpulses auf dieselbe Achse.
Bestimmung 4
Eindimensionale Bewegung ist die Bewegung eines Körpers entlang einer der Koordinatenachsen.
Beispiel 1
Betrachten Sie als Beispiel den freien Fall eines Körpers mit einer Anfangsgeschwindigkeit v 0 unter Einwirkung der Schwerkraft über einen Zeitraum t. Wenn die Richtung der Achse O Y vertikal nach unten gerichtet ist, ist der Gravitationsimpuls F t \u003d mg, der zur Zeit t wirkt, gleich m g t. Ein solcher Impuls ist gleich einer Änderung des Impulses des Körpers:
F t t \u003d m g t \u003d Δ p \u003d m (v - v 0), woher v \u003d v 0 + g t.
Die Eingabe stimmt mit der kinematischen Formel zur Bestimmung der Geschwindigkeit einer gleichförmig beschleunigten Bewegung überein. Der Kraftmodul ändert sich über das gesamte Intervall t nicht. Wenn sie betragsmäßig veränderlich ist, dann erfordert die Impulsformel die Substitution des Mittelwertes der Kraft F durch p aus dem Zeitintervall t. Bild 1 . Sechszehn . 2 zeigt, wie der Impuls einer zeitabhängigen Kraft bestimmt wird.

Bild 1 . Sechszehn . 2. Berechnung des Kraftimpulses aus dem Diagramm von F (t)
Es ist notwendig, das Intervall Δ t auf der Zeitachse zu wählen, es ist klar, dass die Kraft F(t) praktisch unverändert. Kraftstoß F (t) Δ t für eine Zeitspanne Δ t wird gleich der Fläche der schattierten Figur sein. Bei Teilung der Zeitachse in Intervalle durch Δ t i addieren Sie auf dem Intervall von 0 bis t die Impulse aller wirkenden Kräfte aus diesen Intervallen Δ t i , dann ist der Gesamtkraftimpuls gleich dem Formationsbereich unter Verwendung der Stufen- und Zeitachse.
Durch Anwenden der Grenze (Δ t i → 0) können Sie den Bereich finden, der durch den Graphen begrenzt wird F(t) und die t-Achse. Die Verwendung der Definition des Kraftimpulses aus dem Zeitplan ist bei allen Gesetzen anwendbar, bei denen sich Kräfte und Zeit ändern. Diese Lösung führt zur Integration der Funktion F(t) aus dem Intervall [ 0 ; t] .
Bild 1 . Sechszehn . 2 zeigt den Kraftimpuls, der im Intervall von t 1 = 0 s bis t 2 = 10 liegt.
Aus der Formel erhalten wir, dass F c p (t 2 - t 1) \u003d 1 2 F m a x (t 2 - t 1) \u003d 100 N s \u003d 100 kg m / s.
Das heißt, das Beispiel zeigt F mit p \u003d 1 2 F m a x \u003d 10 N.
Es gibt Fälle, in denen die Bestimmung der mittleren Kraft F mit p bei bekannter Zeit und Daten über den gemeldeten Impuls möglich ist. Bei einem starken Aufprall auf einen Ball mit einer Masse von 0,415 kg kann eine Geschwindigkeit von v \u003d 30 m / s gemeldet werden. Die ungefähre Einwirkzeit beträgt 8 10 – 3 s.
Dann nimmt die Impulsformel die Form an:
p = m v = 12,5 kg g m/s.
Um die mittlere Kraft F c p beim Aufprall zu bestimmen, ist F c p = p ∆ t = 1,56 10 3 N erforderlich.
Wir haben einen sehr großen Wert erhalten, der einem Körper mit einer Masse von 160 kg entspricht.
Wenn die Bewegung entlang einer gekrümmten Bahn erfolgt, dann der Anfangswert p 1 → und der Endwert
p 2 → kann im Betrag und in der Richtung unterschiedlich sein. Zur Bestimmung des Impulses ∆ p → verwenden Sie das Impulsdiagramm, in dem es Vektoren p 1 → und p 2 → gibt und ∆ p → = p 2 → - p 1 → nach der Parallelogrammregel aufgebaut ist.
Beispiel 2
Abbildung 1 ist als Beispiel dargestellt. Sechszehn . 2, wo ein Diagramm der Impulse eines Balls gezeichnet ist, der von einer Wand abprallt. Beim Aufschlag trifft ein Ball der Masse m mit einer Geschwindigkeit v 1 → unter einem Winkel α zur Normalen auf die Oberfläche und prallt mit einer Geschwindigkeit v 2 → mit einem Winkel β ab. Beim Auftreffen auf die Wand wurde der Ball der Kraft F → ausgesetzt, die in die gleiche Richtung wie der Vektor ∆ p → gerichtet ist.

Bild 1 . Sechszehn . 3 . Ballrückprall von einer rauen Wand und Impulsdiagramm.
Fällt ein Ball der Masse m normal auf eine elastische Unterlage mit der Geschwindigkeit v 1 → = v → , so ändert er sich beim Rückprall zu v 2 → = -v → . Das bedeutet, dass sich für eine gewisse Zeit der Impuls ändert und gleich ∆ p → = -2 m v → ist. Unter Verwendung von Projektionen auf ОХ wird das Ergebnis als Δ p x = – 2 m v x geschrieben. Vom Zeichnen 1 . 16 . 3 man sieht, dass die ОХ-Achse von der Wand weg gerichtet ist, dann v x< 0 и Δ p x >0 . Aus der Formel ergibt sich, dass der Modul Δ p dem Geschwindigkeitsmodul zugeordnet ist, der die Form Δ p = 2 m v annimmt.
Wenn Sie einen Fehler im Text bemerken, markieren Sie ihn bitte und drücken Sie Strg+Enter
Impuls (Quantität der Bewegung) ist eine vektorielle physikalische Größe, die ein Maß für die mechanische Bewegung des Körpers ist. In der klassischen Mechanik ist der Impuls eines Körpers gleich dem Produkt der Masse m dieser Körper mit seiner Geschwindigkeit v, fällt die Richtung des Impulses mit der Richtung des Geschwindigkeitsvektors zusammen:
Systemdynamik Partikel ist die Vektorsumme der Impulse seiner einzelnen Partikel: p=(sums) Pi, wo Pi ist der Impuls des i-ten Teilchens.
Satz über die Änderung des Impulses des Systems: der Gesamtimpuls des Systems kann nur durch Einwirkung äußerer Kräfte geändert werden: Fext=dp/dt(1), d.h. die zeitliche Ableitung des Impulses des Systems ist gleich der Vektorsumme aller äußeren Kräfte, die auf die Teilchen des Systems einwirken. Wie im Falle eines einzelnen Teilchens folgt aus Ausdruck (1), dass das Inkrement des Impulses des Systems gleich dem Impuls der Resultierenden aller äußeren Kräfte für die entsprechende Zeitdauer ist:
p2-p1= t & 0 F ext dt.
In klassischer Mechanik, komplett Schwung System von materiellen Punkten wird als Vektorgröße bezeichnet, die gleich der Summe der Produkte der Massen von materiellen Punkten bei ihrer Geschwindigkeit ist:
![]()
entsprechend heißt die Größe Impuls eines materiellen Punktes. Es ist eine Vektorgröße, die in die gleiche Richtung wie die Geschwindigkeit des Teilchens gerichtet ist. Die Einheit des Impulses im Internationalen Einheitensystem (SI) ist Kilogramm Meter pro Sekunde(kgm/s).
Wenn wir es mit einem Körper endlicher Größe zu tun haben, der nicht aus diskreten materiellen Punkten besteht, ist es zur Bestimmung seines Impulses notwendig, den Körper in kleine Teile zu zerlegen, die als materielle Punkte betrachtet und über sie als a summiert werden können Ergebnis erhalten wir:
Der Impuls eines Systems, das von keinen äußeren Kräften beeinflusst wird (oder diese kompensiert werden), konserviert rechtzeitig:
Die Impulserhaltung folgt in diesem Fall aus Newtons zweitem und drittem Gesetz: Nachdem man Newtons zweites Gesetz für jeden der materiellen Punkte geschrieben hat, aus denen das System besteht, und es über alle materiellen Punkte summiert, aus denen das System besteht, aufgrund von Newtons drittem Gesetz Gesetz erhalten wir die Gleichheit (*).
In der relativistischen Mechanik ist der dreidimensionale Impuls eines Systems nicht wechselwirkender materieller Punkte die Größe
 ,
,
wo m ich- Last ich-ter materieller Punkt.
Für ein geschlossenes System nicht wechselwirkender materieller Punkte bleibt dieser Wert erhalten. Der dreidimensionale Impuls ist jedoch keine relativistisch invariante Größe, da er vom Bezugssystem abhängt. Ein aussagekräftigerer Wert wird ein vierdimensionaler Impuls sein, der für einen materiellen Punkt definiert ist als

In der Praxis werden häufig folgende Beziehungen zwischen Masse, Impuls und Energie eines Teilchens verwendet:
Im Prinzip werden für ein System nicht wechselwirkender materieller Punkte ihre 4-Impulse summiert. Für wechselwirkende Teilchen in der relativistischen Mechanik sollte man jedoch nicht nur die Impulse der Teilchen berücksichtigen, aus denen das System besteht, sondern auch den Impuls des Wechselwirkungsfeldes zwischen ihnen. Daher ist eine viel aussagekräftigere Größe in der relativistischen Mechanik der Energie-Impuls-Tensor, der die Erhaltungssätze vollständig erfüllt.
Impulseigenschaften
· Additivität. Diese Eigenschaft bedeutet, dass der Impuls eines aus materiellen Punkten bestehenden mechanischen Systems gleich der Summe der Impulse aller im System enthaltenen materiellen Punkte ist.
· Invarianz bezüglich der Drehung des Bezugsrahmens.
· Erhaltung. Der Impuls ändert sich nicht während Wechselwirkungen, die nur die mechanischen Eigenschaften des Systems ändern. Diese Eigenschaft ist invariant gegenüber Galilei-Transformationen.Die Eigenschaften der Erhaltung der kinetischen Energie, der Impulserhaltung und des zweiten Newtonschen Gesetzes reichen aus, um die mathematische Formel für den Impuls herzuleiten.
Impulserhaltungssatz (Impulserhaltungssatz)- Die Vektorsumme der Impulse aller Körper des Systems ist ein konstanter Wert, wenn die Vektorsumme der auf das System einwirkenden äußeren Kräfte gleich Null ist.
In der klassischen Mechanik wird der Impulserhaltungssatz meist als Folge der Newtonschen Gesetze abgeleitet. Aus den Newtonschen Gesetzen kann gezeigt werden, dass bei der Bewegung im leeren Raum der Impuls zeitlich erhalten bleibt und bei Vorhandensein von Wechselwirkung die Geschwindigkeit seiner Änderung durch die Summe der aufgebrachten Kräfte bestimmt wird.
Wie alle grundlegenden Erhaltungssätze ist das Impulserhaltungsgesetz nach dem Satz von Noether mit einer der grundlegenden Symmetrien verbunden - der Homogenität des Raums
Die Impulsänderung eines Körpers ist gleich dem Impuls der Resultierenden aller auf den Körper wirkenden Kräfte. Dies ist eine andere Formulierung des zweiten Newtonschen Gesetzes.


