E ពេញ \u003d E kin + U
E kin \u003d mv 2 / 2 + Jw 2 / 2 - ថាមពល kinetic នៃចលនាបកប្រែ និងបង្វិល,
U = mgh គឺជាថាមពលសក្តានុពលនៃតួនៃម៉ាស់ m នៅកម្ពស់ h ពីលើផ្ទៃផែនដី។
F tr \u003d kN - កម្លាំងកកិតរអិល, N - កម្លាំងសម្ពាធធម្មតា, k - មេគុណកកិត។
នៅក្នុងករណីនៃផលប៉ះពាល់ក្រៅមជ្ឈមណ្ឌលច្បាប់នៃការអភិរក្សនៃសន្ទុះ
ស ទំ= const ត្រូវបានសរសេរក្នុងការព្យាករលើអ័ក្សកូអរដោណេ។
ច្បាប់នៃការអភិរក្សនៃសន្ទុះមុំ និងច្បាប់នៃថាមវន្តនៃចលនាបង្វិល
ស អិល= const គឺជាច្បាប់នៃការអភិរក្សនៃសន្ទុះមុំ
L OS \u003d Jw - សន្ទុះមុំអ័ក្ស,
L orb = [ rp] គឺជាសន្ទុះមុំនៃគន្លង,
dL / dt = SM ext - ច្បាប់នៃឌីណាមិកចលនារង្វិល,
ម= [RF] = rFsina – ពេលនៃកម្លាំង, F – កម្លាំង, a – មុំរវាងកាំវ៉ិចទ័រ និងកម្លាំង។
A \u003d òMdj - ដំណើរការក្នុងអំឡុងពេលចលនាបង្វិល។
ផ្នែកមេកានិច
Kinematics
កិច្ចការមួយ។
កិច្ចការមួយ។ ការពឹងផ្អែកនៃផ្លូវដែលធ្វើដំណើរដោយរាងកាយទាន់ពេលវេលាត្រូវបានផ្តល់ឱ្យដោយសមីការ s = A–Bt + Ct 2 ។ ស្វែងរកល្បឿន និងការបង្កើនល្បឿននៃរាងកាយនៅពេល t ។
ឧទាហរណ៍ដំណោះស្រាយ
v \u003d ds / dt \u003d -B + 2Ct, a \u003d dv / dt \u003d ds 2 / dt 2 \u003d 2C ។
ជម្រើស
១.១. ការពឹងផ្អែកនៃផ្លូវដែលធ្វើដំណើរដោយរាងកាយទាន់ពេលវេលាត្រូវបានផ្តល់ឱ្យដោយ
សមីការ s \u003d A + Bt + Ct 2 ដែល A \u003d 3m, B \u003d 2 m / s, C \u003d 1 m / s 2 ។
ស្វែងរកល្បឿនក្នុងវិនាទីទីបី។
២.១. ការពឹងផ្អែកនៃផ្លូវដែលធ្វើដំណើរដោយរាងកាយទាន់ពេលវេលាត្រូវបានផ្តល់ឱ្យដោយ
សមីការ s \u003d A + Bt + Ct 2 + Dt 3 ដែល C \u003d 0.14m / s 2 និង D \u003d 0.01 v / c 3 ។
បន្ទាប់ពីរយៈពេលប៉ុន្មានបន្ទាប់ពីការចាប់ផ្តើមនៃចលនាការបង្កើនល្បឿននៃរាងកាយ
នឹងស្មើនឹង 1 m / s 2 ។
3.1. កង់ដែលបង្វិលបង្កើនល្បឿនស្មើគ្នាបានឈានដល់ល្បឿនមុំ
20 rad/s តាមរយៈ N = 10 បដិវត្តន៍បន្ទាប់ពីការចាប់ផ្តើមនៃចលនា។ ស្វែងរក
ការបង្កើនល្បឿនមុំនៃកង់។
4.1. កង់ដែលមានកាំ 0.1 m បង្វិល ដូច្នេះការពឹងផ្អែកនៃមុំ
j \u003d A + Bt + Ct 3 ដែល B \u003d 2 rad / s និង C \u003d 1 rad / s 3 ។ សម្រាប់ចំណុចនិយាយកុហក
នៅលើគែមកង់ ស្វែងរកបន្ទាប់ពី 2 វិនាទីបន្ទាប់ពីការចាប់ផ្តើមនៃចលនា៖
1) ល្បឿនមុំ 2) ល្បឿនលីនេអ៊ែរ 3) មុំ
ការបង្កើនល្បឿន 4) ការបង្កើនល្បឿន tangential ។
5.1. កង់មួយដែលមានកាំ 5 សង់ទីម៉ែត្របង្វិលដូច្នេះការពឹងផ្អែកនៃមុំ
ការបង្វិលកាំកង់ធៀបនឹងពេលវេលាត្រូវបានផ្តល់ដោយសមីការ
j \u003d A + Bt + Ct 2 + Dt 3 ដែល D \u003d 1 rad / s 3 ។ ស្វែងរកចំណុចនិយាយកុហក
នៅលើគែមកង់, ការផ្លាស់ប្តូរនៅក្នុងការបង្កើនល្បឿន tangential សម្រាប់
រាល់វិនាទីនៃចលនា។
6.1. កង់ដែលមានកាំ 10 សង់ទីម៉ែត្របង្វិលដូច្នេះការពឹងផ្អែក
ល្បឿនលីនេអ៊ែរនៃចំណុចដែលស្ថិតនៅលើគែមកង់ ពី
ពេលវេលាត្រូវបានផ្តល់ដោយសមីការ v \u003d At + Bt 2 ដែល A \u003d 3 cm / s 2 និង
B \u003d 1 cm / s ៣. រកមុំដែលបង្កើតឡើងដោយវ៉ិចទ័រនៃពេញលេញ
ការបង្កើនល្បឿនជាមួយកាំកង់នៅពេល t = 5s បន្ទាប់ពី
ការចាប់ផ្តើមនៃចលនា។
7.1. កង់បង្វិលដូច្នេះភាពអាស្រ័យនៃមុំបង្វិលនៃកាំ
កង់ធៀបនឹងពេលវេលាត្រូវបានផ្តល់ដោយសមីការ j = A + Bt + Ct 2 + Dt 3 ដែល
B \u003d 1 rad / s, C \u003d 1 rad / s 2, D \u003d 1 rad / s 3 ។ ស្វែងរកកាំនៃកង់,
ប្រសិនបើគេដឹងថានៅចុងបញ្ចប់នៃវិនាទីទីពីរនៃចលនា
ការបង្កើនល្បឿនធម្មតានៃចំនុចដែលស្ថិតនៅលើគែមកង់គឺ
និង n \u003d 346 m / s 2 ។
8.1. វ៉ិចទ័រកាំនៃចំណុចសម្ភារៈផ្លាស់ប្តូរតាមពេលវេលា
ច្បាប់ រ=t ៣ ខ្ញុំ+ t2 j.កំណត់ពេលវេលានៃពេលវេលា t = 1 s:
ម៉ូឌុលល្បឿន និងម៉ូឌុលបង្កើនល្បឿន។
9.1. វ៉ិចទ័រកាំនៃចំណុចសម្ភារៈប្រែប្រួលតាមពេលវេលា
ច្បាប់ រ=4t2 ខ្ញុំ+ 3t j+2ទៅ។សរសេរកន្សោមសម្រាប់វ៉ិចទ័រ
ល្បឿននិងការបង្កើនល្បឿន។ កំណត់សម្រាប់ពេលវេលា t = 2 s
ម៉ូឌុលល្បឿន។
10.1. ចំណុចមួយផ្លាស់ទីក្នុងយន្តហោះ xy ពីទីតាំងដែលមានកូអរដោណេ
x 1 = y 1 = 0 ជាមួយនឹងល្បឿន v= ក ខ្ញុំ+Bx j. កំណត់សមីការ
គន្លងនៃចំនុច y(x) និងរូបរាងនៃគន្លង។
គ្រានៃនិចលភាព
ចម្ងាយ L/3 ពីដើមដំបង។
ឧទាហរណ៍នៃដំណោះស្រាយ។
M - ម៉ាស់ដំបង J = J st + J gr
L - ប្រវែងដំបង J st1 \u003d mL 2 / 12 - រំពេចនៃនិចលភាព
2m គឺជាទំងន់នៃទំងន់ដែលទាក់ទងទៅនឹងកណ្តាលរបស់វា។ តាមទ្រឹស្តីបទ
Steiner ស្វែងរកពេលនៃនិចលភាព
J=? ដំបងទាក់ទងទៅនឹងអ័ក្ស o គម្លាតពីកណ្តាលដោយចម្ងាយ a = L/2 - L/3 = L/6 ។
J st \u003d mL 2 / 12 + m (L / 6) 2 \u003d mL 2 / 9 ។
នេះបើយោងតាមគោលការណ៍នៃ superposition
J \u003d mL 2 / 9 + 2m (2L / 3) 2 \u003d mL ២.
ជម្រើស
១.២. កំណត់ពេលនៃនិចលភាពនៃដំបងដែលមានម៉ាស់ 2m ទាក់ទងទៅនឹងអ័ក្សដែលមានគម្លាតពីដើមដំបងដោយចម្ងាយ L/4 ។ នៅចុងបញ្ចប់នៃដំបង, ម៉ាស់ប្រមូលផ្តុំ m ។
2.2. កំណត់ពេលនៃនិចលភាពនៃដំបងដែលមានម៉ាស់ m ទាក់ទងទៅនឹង
អ័ក្សគម្លាតពីដើមដំបងនៅចម្ងាយ L / 5 ។ នៅចុងបញ្ចប់
ដំបងប្រមូលផ្តុំម៉ាស់ 2 ម។
៣.២. កំណត់ពេលនៃនិចលភាពនៃដំបងដែលមានម៉ាស់ 2m អំពីអ័ក្សដែលមានគម្លាតពីដើមដំបងដោយចម្ងាយ L/6 ។ នៅចុងបញ្ចប់នៃដំបង, ម៉ាស់ប្រមូលផ្តុំ m ។
៤.២. កំណត់ពេលនៃនិចលភាពនៃដំបងដែលមានម៉ាស់ 3m អំពីអ័ក្សដែលមានគម្លាតពីដើមដំបងដោយចម្ងាយ L/8 ។ នៅចុងបញ្ចប់នៃដំបងម៉ាស់ប្រមូលផ្តុំគឺ 2 ម។
៥.២. កំណត់ពេលនៃនិចលភាពនៃដំបងដែលមានម៉ាស់ 2m អំពីអ័ក្សឆ្លងកាត់ដើមដំបង។ ម៉ាស់ប្រមូលផ្តុំ m ត្រូវបានភ្ជាប់ទៅនឹងចុងនិងពាក់កណ្តាលនៃដំបង។
៦.២. កំណត់ពេលនៃនិចលភាពនៃដំបងដែលមានម៉ាស់ 2m អំពីអ័ក្សឆ្លងកាត់ដើមដំបង។ ម៉ាស់ប្រមូលផ្តុំ 2m ត្រូវបានភ្ជាប់ទៅនឹងចុងដំបង ហើយម៉ាស់ប្រមូលផ្តុំ 2m ត្រូវបានភ្ជាប់ទៅកណ្តាល។
៧.២. កំណត់ពេលនៃនិចលភាពនៃដំបងជាមួយនឹងម៉ាស់ m អំពីអ័ក្សដែលជា L/4 ពីដើមដំបង។ ម៉ាស់ប្រមូលផ្តុំ m ត្រូវបានភ្ជាប់ទៅនឹងចុងនិងពាក់កណ្តាលនៃដំបង។
៨.២. រកពេលនៃនិចលភាពនៃរង្វង់មូលស្តើងនៃម៉ាស់ m និងកាំ r អំពីអ័ក្សដែលស្ថិតនៅក្នុងយន្តហោះនៃសង្វៀន ហើយគម្លាតពីកណ្តាលរបស់វាដោយ r/2 ។
៩.២. ស្វែងរកពេលនៃនិចលភាពនៃថាសដូចគ្នាស្តើងនៃម៉ាស់ m និងកាំ r អំពីអ័ក្សដែលស្ថិតនៅក្នុងយន្តហោះនៃឌីស ហើយគម្លាតពីកណ្តាលរបស់វាដោយ r/2 ។
១០.២. ស្វែងរកពេលនៃនិចលភាពនៃបាល់ដូចគ្នានៃម៉ាស់ m និងកាំ
r ទាក់ទងទៅនឹងអ័ក្សដែលមានគម្លាតពីកណ្តាលរបស់វាដោយ r/2 ។
Tomsk: TUSUR, 2012.- 136 ទំ។
សៀវភៅណែនាំនេះមាន 13 ជំពូកលើផ្នែកសំខាន់ៗនៃមេកានិច ដែលផ្តល់ដោយស្តង់ដារមូលដ្ឋាននៃការអប់រំកាយសម្រាប់និស្សិតនៃឯកទេសបច្ចេកទេសនៃសាកលវិទ្យាល័យ។ នៅកម្រិតវិធីសាស្រ្តដើម សៀវភៅដៃរៀបរាប់ពីមូលដ្ឋានគ្រឹះនៃវិធីសាស្ត្រកូអរដោណេ និងបរិធានគំនិតវ៉ិចទ័រនៃមេកានិច មូលដ្ឋានគ្រឹះនៃ kinematics និងថាមវន្តនៃចលនាបកប្រែ និងបង្វិលនៃរាងកាយរឹង ច្បាប់នៃការអភិរក្សថាមពល និងសន្ទុះនៃមេកានិច។ ប្រព័ន្ធ; មេកានិចនៃរូបធាតុរឹងរាវ និងយឺត ទ្រឹស្តីបុរាណនៃទំនាញ និងចលនានៃរូបកាយសេឡេស្ទាល លក្ខណៈសម្បត្តិជាមូលដ្ឋាននៃលំយោលអាម៉ូនិក មូលដ្ឋានគ្រឹះរូបវន្តនៃទំនាក់ទំនងពិសេស។ សៀវភៅណែនាំអំពីរូបវិទ្យានេះត្រូវបានបង្ហាញជាភាសាសង្ខេបបំផុត ប៉ុន្តែជាភាសាដែលផ្តល់ព័ត៌មាន។ ជាទូទៅសៀវភៅណែនាំនេះហាក់ដូចជាមានប្រយោជន៍មិនត្រឹមតែសម្រាប់និស្សិតឆ្នាំទី 1 ប៉ុណ្ណោះទេ ប៉ុន្តែសម្រាប់និស្សិតបញ្ចប់ការសិក្សាទាំងអស់នៃសាកលវិទ្យាល័យបច្ចេកទេសផងដែរ។ គ្រូរូបវិទ្យាក៏នឹងរកឃើញវិធីសាស្រ្តថ្មីៗផងដែរនៅក្នុងបទបង្ហាញនៃផ្នែកមួយចំនួន។
ទម្រង់៖ pdf
ទំហំ: 1.7 មេកាបៃ
មើល, ទាញយក៖yandex.disk
តារាងមាតិកា
សេចក្តីផ្តើម ៦
1 វិធីសាស្រ្តសំរបសំរួល។ វ៉ិចទ័រ ៩
១.១ និយមន័យនៃពាក្យរូបវន្តបឋម ៩
១.២ ប្រព័ន្ធសំរបសំរួល ១០
1.3 ល្បឿននិងការបង្កើនល្បឿន 11
1.4 សំរបសំរួលការផ្លាស់ប្តូរជាអាំងតេក្រាលនៃល្បឿន 12
1.5 ទូទៅចំពោះករណីនៃចលនាបីវិមាត្រ ១៣
១.៦ វ៉ិចទ័រ ១៤
១.៧ ពិជគណិតវ៉ិចទ័រ ១៦
2 Kinematics of material point 19
2.1 ល្បឿន Curvilinear និងការបង្កើនល្បឿន 19
2.2 ផលិតផលឆ្លងកាត់ 21
២.៣ Kinematics of rotary motion ២៤
2.4 ចលនារបស់រាងកាយបោះនៅមុំមួយទៅផ្ដេក 26
៣ ច្បាប់ចលនា ២៩
៣.១ គំនិតនៃកម្លាំង ២៩
3.2 ច្បាប់ទីពីររបស់ញូតុន។ ទម្ងន់ ៣០
៣.៣ ច្បាប់ទីបីរបស់ញូតុន ៣១
3.4 ស៊ុម Inertial នៃសេចក្តីយោង 33
៣.៥ ស៊ុមមិននិចលភាពនៃសេចក្តីយោង ៣៤
៣.៦ គោលការណ៍នៃទំនាក់ទំនងរបស់កាលីលេ ៣៥
៣.៧ ឧទហរណ៍នៃកម្លាំងផ្សេងៗ ៣៦
៤ សន្ទុះ និងថាមពល ៤០
4.1 មជ្ឈមណ្ឌលនៃនិចលភាព (កណ្តាលនៃម៉ាស) នៃរាងកាយពង្រីក 40
៤.២ ការកំណត់ទីតាំងនៃចំណុចកណ្តាលនៃអង្គធាតុសាមញ្ញ ៤២
៤.៣ សន្ទុះរាងកាយ ៤៣
៤.៤ ការងារមេកានិក និងថាមពល kinetic ៤៤
៤.៥ កម្លាំងអភិរក្ស ៤៦
4.6 ថាមពលសក្តានុពល។ ជម្រាល ៤៧
៤.៧ ច្បាប់នៃការអភិរក្សថាមពលមេកានិច ៤៩
៥ ការប៉ះទង្គិចនៃភាគល្អិតពីរ ៥១
5.1 ថាមពលខាងក្នុងនៃប្រព័ន្ធមេកានិច 51
៥.២ ចំណាត់ថ្នាក់នៃការប៉ះទង្គិចទ្វេ ៥២
5.3 ផលប៉ះពាល់ផ្នែកកណ្តាល (ផ្នែកខាងមុខ) យ៉ាងពេញលេញ 53
5.4 ផលប៉ះពាល់ inelastic ដាច់ខាត 54
5.5 ការប៉ះទង្គិចនៅក្នុងប្រព័ន្ធ C 55
5.6 ភាពយឺតយ៉ាវមិនប៉ះពាល់កណ្តាល 55
៦ មេកានិចរាវ ៥៨
៦.១ ច្បាប់របស់ប៉ាស្កាល់ ៥៨
6.2 សម្ពាធអ៊ីដ្រូស្តាទិច។ កម្លាំងរបស់ Archimedes ៥៩
6.3 លំហូរថេរនៃវត្ថុរាវដ៏ល្អមួយ 60
6.4 ឧទាហរណ៍នៃការប្រើប្រាស់សមីការ Bernoulli 62
៦.៥ កកិត viscous ៦៤
6.6 លំហូរនៃអង្គធាតុរាវ viscous តាមបំពង់ 65
6.7 លំហូរច្របូកច្របល់។ Reynolds លេខ 66
6.8 កម្លាំងតស៊ូនៅពេលដែលសាកសពផ្លាស់ទីក្នុងសារធាតុរាវ viscous 67
7 លក្ខណៈសម្បត្តិ Elastic នៃសារធាតុរឹង 69
៧.១ ភាពតានតឹង និងសំពាធ ៦៩
7.2 ច្បាប់របស់ហុក។ ម៉ូឌុលរបស់ Young និងសមាមាត្ររបស់ Poisson 71
7.3 ថាមពលនៃការខូចទ្រង់ទ្រាយយឺតនៃមធ្យម 72
៧.៤ ការបង្ហាប់គ្រប់ជ្រុងជ្រោយ ៧២
7.5 ការខូចទ្រង់ទ្រាយបង្ហាប់នៃរបារថេរ 73
7.6 ការខូចទ្រង់ទ្រាយកំដៅនៃសារធាតុរឹង 74
7.7 ការខូចទ្រង់ទ្រាយ Shear 75
៨ ថាមវន្តនៃតួរឹង ៧៨
៨.១ សន្ទុះនៃនិចលភាពនៃរាងកាយរឹង ៧៨
8.2 Moments of inertia of some simple body 79
៨.៣ កម្លាំង ៨១
៨.៤ កម្លាំងបង្វិលជុំ ៨២
៨.៥ ថាមវន្តរង្វិល ៨៣
8.6 រំកិលតួរាងមូលចុះពីយន្តហោះទំនោរ 84
9 ការបង្វិល 3D នៃតួរឹង 87
9.1 Tensor នៃពេលនៃនិចលភាពនៃរាងកាយរឹង 87
៩.២ ថាមពល និងសន្ទុះមុំនៃតួមិនស្មើគ្នា ៨៩
៩.៣ ជីរ៉ូស្កូប ៨៩
9.4 កម្លាំង Centrifugal និង Coriolis 91
១០ ទំនាញ ៩៤
១០.១ ច្បាប់ទំនាញរបស់ញូតុន ៩៤
10.2 ទំនាញនៅជិតសាកសពពង្រីក 96
១០.៣ កម្លាំងទឹករលក ៩៨
10.4 បញ្ហា Kepler 99
១០.៥ ប៉ារ៉ាម៉ែត្រនៃគន្លងរាងអេលីប ១០១
10.6 ក្បួនដោះស្រាយសម្រាប់គណនាគន្លងនៃរូបកាយសេឡេស្ទាល 103
១១ អាម៉ូនិក ១០៤
១១.១ រំញ័រតូច ១០៤
១១.២ ថាមពលចលនារំញ័រ ១០៦
11.3 ការបន្ថែមនៃលំយោលមួយវិមាត្រ។ Beats ១០៦
១១.៤ ការបន្ថែមរំញ័រកាត់កែងគ្នា ១០៧
១១.៥ លំយោលនៃប៉ោលគូ ១០៨
១២ គោលការណ៍នៃទំនាក់ទំនង ១១២
12.1 ល្បឿននៃពន្លឺ និង postulate របស់ Einstein 112
12.2 ការផ្លាស់ប្តូរ Lorentz 114
12.3 ផលវិបាកនៃការផ្លាស់ប្តូរ Lorentz 116
១២.៣.១ ទំនាក់ទំនងនៃភាពស្របគ្នា ១១៦
12.3.2 ទំនាក់ទំនងនៃប្រវែងចម្រៀក 117
12.3.3 ទំនាក់ទំនងនៃចន្លោះពេលរវាងព្រឹត្តិការណ៍។ . ១១៨
12.4 ការបន្ថែមល្បឿន 119
12.5 ពន្លឺ aberration 120
១៣ ឌីណាមិកទំនាក់ទំនង ១២២
១៣.១ សន្ទុះទំនាក់ទំនង ១២២
១៣.២ ថាមពលនៃភាគល្អិតទំនាក់ទំនង ១២៣
១៣.៣ ច្បាប់នៃការអភិរក្សថាមពលសរុប ១២៤
13.4 ការប៉ះទង្គិចគ្នាដោយ Inelastic នៃភាគល្អិតទំនាក់ទំនងពីរ 126
១៣.៥ លំហ ៤ វិមាត្រ ១២៧
13.6 ផលិតផលចំនុចនៃ 4 វ៉ិចទ័រ 129
១៣.៧ ឥទ្ធិពលអុបទិក ១៣១
សេចក្តីសន្និដ្ឋាន 134
អក្សរសិល្ប៍ ១៣៥
សៀវភៅណែនាំនេះមាន 13 ជំពូកលើផ្នែកសំខាន់ៗនៃមេកានិច ដែលផ្តល់ដោយស្តង់ដារមូលដ្ឋាននៃការអប់រំកាយសម្រាប់និស្សិតនៃឯកទេសបច្ចេកទេសនៃសាកលវិទ្យាល័យ។
នៅកម្រិតវិធីសាស្រ្តដើម សៀវភៅដៃរៀបរាប់ពីមូលដ្ឋានគ្រឹះនៃវិធីសាស្ត្រកូអរដោណេ និងបរិធានគំនិតវ៉ិចទ័រនៃមេកានិច មូលដ្ឋានគ្រឹះនៃ kinematics និងថាមវន្តនៃចលនាបកប្រែ និងបង្វិលនៃរាងកាយរឹង ច្បាប់នៃការអភិរក្សថាមពល និងសន្ទុះនៃមេកានិច។ ប្រព័ន្ធ មេកានិកនៃអង្គធាតុរាវ និងអង្គធាតុរឹងយឺត ទ្រឹស្តីបុរាណនៃទំនាញ និងចលនានៃរូបកាយសេឡេស្ទាល លក្ខណៈសម្បត្តិជាមូលដ្ឋាននៃលំយោលអាម៉ូនិក មូលដ្ឋានគ្រឹះរូបវន្តនៃទ្រឹស្តីពិសេសនៃទំនាក់ទំនង។
ខ្លឹមសារនៃជំពូកគឺជាបទបង្ហាញដែលស៊ីសង្វាក់គ្នា និងស៊ីសង្វាក់គ្នានៃសម្ភារៈ ដែលក្នុងនោះធាតុសំខាន់បំផុតត្រូវបានគូសបញ្ជាក់ជាពិសេស៖ និយមន័យនៃពាក្យថ្មី សេចក្តីថ្លែងការណ៍ដែលមានកម្លាំងទ្រឹស្តីបទ អង្គហេតុ ឬបទប្បញ្ញត្តិដែលត្រូវការការយកចិត្តទុកដាក់ជាពិសេសពីអ្នកអាន។ នៅចុងបញ្ចប់នៃជំពូកនីមួយៗ គឺជាបញ្ជីសំណួរត្រួតពិនិត្យ ដែលអ្នកអានគួរតែអាចឆ្លើយបានក្នុងអំឡុងពេលសន្ទនា ឬសន្ទនាជាមួយគ្រូ។
បរិមាណវ៉ិចទ័រទាំងអស់នៅក្នុងរូបមន្ត និងអត្ថបទត្រូវបានចង្អុលបង្ហាញជាដិត ឧទាហរណ៍ វ៉ិចទ័រ វ៉ិចទ័រ v ។ ផលិតផលមាត្រដ្ឋាននៃវ៉ិចទ័រត្រូវបានតាងដោយចំនុចរវាងវ៉ិចទ័រកត្តា - Fv និងផលិតផលវ៉ិចទ័រដោយឈើឆ្កាង - g xp ។ វង់ក្រចកក្នុងរូបមន្តគណិតវិទ្យាត្រូវបានប្រើសម្រាប់តែការដាក់ជាក្រុមស្តង់ដារនៃប្រតិបត្តិការគណិតវិទ្យា និងការកំណត់អាគុយម៉ង់មុខងារប៉ុណ្ណោះ។
សៀវភៅណែនាំអំពីរូបវិទ្យានេះត្រូវបានបង្ហាញជាភាសាសង្ខេបបំផុត ប៉ុន្តែជាភាសាដែលផ្តល់ព័ត៌មាន។ ជាទូទៅសៀវភៅណែនាំនេះហាក់ដូចជាមានប្រយោជន៍មិនត្រឹមតែសម្រាប់និស្សិតឆ្នាំទី 1 ប៉ុណ្ណោះទេ ប៉ុន្តែសម្រាប់និស្សិតបញ្ចប់ការសិក្សាទាំងអស់នៃសាកលវិទ្យាល័យបច្ចេកទេសផងដែរ។ គ្រូរូបវិទ្យាក៏នឹងរកឃើញវិធីសាស្រ្តថ្មីៗផងដែរនៅក្នុងបទបង្ហាញនៃផ្នែកមួយចំនួន។
ថាមពល និងសន្ទុះ គឺជាគោលគំនិតសំខាន់បំផុតក្នុងរូបវិទ្យា។ វាប្រែថាច្បាប់អភិរក្សដើរតួនាទីយ៉ាងសំខាន់នៅក្នុងធម្មជាតិជាទូទៅ។ ការស្វែងរកបរិមាណដែលបានរក្សាទុក និងច្បាប់ដែលពួកគេអាចទទួលបានគឺជាប្រធានបទនៃការស្រាវជ្រាវនៅក្នុងផ្នែកជាច្រើននៃរូបវិទ្យា។ ចូរយើងទាញយកច្បាប់ទាំងនេះតាមរបៀបសាមញ្ញបំផុតពីច្បាប់ទីពីររបស់ញូតុន។
ច្បាប់នៃការអភិរក្សសន្ទុះ។ជីពចរ, ឬ បរិមាណនៃចលនាទំកំណត់ជាផលិតផលនៃម៉ាស់ មចំណុចសម្ភារៈក្នុងមួយល្បឿន វ: ទំ= មវ. ច្បាប់ទីពីររបស់ញូតុន ដោយប្រើនិយមន័យនៃសន្ទុះត្រូវបានសរសេរជា
= ឃទំ= ច, (1.3.1)
នៅទីនេះ ចគឺជាលទ្ធផលនៃកម្លាំងដែលបានអនុវត្តទៅលើរាងកាយ។
ប្រព័ន្ធបិទហៅថាប្រព័ន្ធដែលផលបូកនៃកម្លាំងខាងក្រៅដែលធ្វើសកម្មភាពលើរាងកាយគឺស្មើនឹងសូន្យ៖
ច= å ចខ្ញុំ= 0 . (1.3.2)
បន្ទាប់មកការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃរាងកាយនៅក្នុងប្រព័ន្ធបិទមួយយោងទៅតាមច្បាប់ទីពីររបស់ញូវតុន (1.3.1), (1.3.2) គឺ
ឃទំ= 0 . (1.3.3)
ក្នុងករណីនេះសន្ទុះនៃប្រព័ន្ធភាគល្អិតនៅតែថេរ៖
ទំ= å ទំខ្ញុំ= const ។ (1.3.4)
កន្សោមនេះគឺ ច្បាប់នៃការអភិរក្សនៃសន្ទុះដែលត្រូវបានបង្កើតដូចខាងក្រោម៖ នៅពេលដែលផលបូកនៃកម្លាំងខាងក្រៅដែលធ្វើសកម្មភាពលើរាងកាយ ឬប្រព័ន្ធនៃសាកសពគឺស្មើនឹងសូន្យ សន្ទុះនៃរាងកាយ ឬប្រព័ន្ធនៃសាកសពគឺជាតម្លៃថេរ។
ច្បាប់នៃការអភិរក្សថាមពល។នៅក្នុងជីវិតប្រចាំថ្ងៃ តាមគំនិតនៃ "ការងារ" យើងយល់ពីការងារដែលមានប្រយោជន៍របស់មនុស្សម្នាក់។ នៅក្នុងរូបវិទ្យាវាត្រូវបានសិក្សា ការងារមេកានិចដែលកើតឡើងតែនៅពេលដែលរាងកាយផ្លាស់ទីនៅក្រោមសកម្មភាពនៃកម្លាំងមួយ។ ការងារមេកានិច ∆A ត្រូវបានកំណត់ជាផលិតផលមាត្រដ្ឋាននៃកម្លាំង ចបានអនុវត្តទៅលើរាងកាយ និងការផ្លាស់ទីលំនៅរបស់រាងកាយ Δ rជាលទ្ធផលនៃកម្លាំងនេះ៖
ក ក= (ច, Δ r) = ចក r cosα។ (1.3.5)
នៅក្នុងរូបមន្ត (1.3.5) សញ្ញានៃការងារត្រូវបានកំណត់ដោយសញ្ញានៃ cos α។
ចង់រើគណៈរដ្ឋមន្ត្រី យើងសង្កត់វាដោយកម្លាំង ប៉ុន្តែបើវាមិនរើក្នុងពេលតែមួយទេ យើងមិនធ្វើការងារមេកានិកទេ។ មនុស្សម្នាក់អាចស្រមៃមើលករណីនៅពេលដែលរាងកាយផ្លាស់ទីដោយគ្មានការចូលរួមពីកម្លាំង (ដោយនិចលភាព)
ក្នុងករណីនេះក៏មិនមានការងារមេកានិកដែរ។ ប្រសិនបើប្រព័ន្ធរាងកាយអាចដំណើរការបាន នោះវាមានថាមពល។
ថាមពលគឺជាគោលគំនិតដ៏សំខាន់បំផុតមួយ មិនត្រឹមតែនៅក្នុងមេកានិចប៉ុណ្ណោះទេ ប៉ុន្តែក៏មានផ្នែកផ្សេងទៀតនៃរូបវិទ្យាផងដែរ៖ ទែម៉ូឌីណាមិក និងរូបវិទ្យាម៉ូលេគុល អគ្គិសនី អុបទិក អាតូម នុយក្លេអ៊ែរ និងរូបវិទ្យាភាគល្អិត។
នៅក្នុងប្រព័ន្ធណាមួយដែលជាកម្មសិទ្ធិរបស់ពិភពរូបវន្ត ថាមពលត្រូវបានអភិរក្សនៅក្នុងដំណើរការណាមួយ។ មានតែទម្រង់ដែលវាឆ្លងកាត់ប៉ុណ្ណោះដែលអាចផ្លាស់ប្តូរបាន។ ជាឧទាហរណ៍ នៅពេលដែលគ្រាប់កាំភ្លើងប៉ះឥដ្ឋមួយផ្នែកនៃថាមពល kinetic (លើសពីនេះទៅទៀត) ត្រូវបានបំប្លែងទៅជាកំដៅ។ ហេតុផលសម្រាប់នេះគឺវត្តមាននៃកម្លាំងកកិតរវាងគ្រាប់កាំភ្លើងនិងឥដ្ឋដែលក្នុងនោះវាផ្លាស់ទីជាមួយនឹងការកកិតយ៉ាងខ្លាំង។ នៅពេលដែល rotor ទួរប៊ីនបង្វិល ថាមពលមេកានិកត្រូវបានបំប្លែងទៅជាថាមពលអគ្គិសនី ហើយក្នុងពេលជាមួយគ្នានោះ ចរន្តមួយលេចឡើងនៅក្នុងសៀគ្វីបិទ។ ថាមពលដែលបានបញ្ចេញក្នុងអំឡុងពេលចំហេះនៃឥន្ធនៈគីមី, i.e. ថាមពលនៃចំណងម៉ូលេគុលត្រូវបានបំប្លែងទៅជាថាមពលកម្ដៅ។ ធម្មជាតិនៃថាមពលគីមី គឺជាថាមពលនៃចំណងអន្តរម៉ូលេគុល និងអន្តរអាតូមិក ដែលតំណាងឱ្យថាមពលម៉ូលេគុល ឬអាតូមិក។
ថាមពលគឺជាបរិមាណមាត្រដ្ឋានដែលបង្ហាញពីសមត្ថភាពរបស់រាងកាយក្នុងការធ្វើការងារ៖
E2-E1= ∆A។ (1.3.6)
នៅពេលដែលការងារមេកានិចត្រូវបានអនុវត្ត ថាមពលនៃរាងកាយផ្លាស់ប្តូរពីទម្រង់មួយទៅទម្រង់មួយទៀត។ ថាមពលនៃរាងកាយអាចមាននៅក្នុងទម្រង់នៃថាមពល kinetic ឬសក្តានុពល។
ថាមពលនៃចលនាមេកានិច
វញាតិ = ។
ហៅ ថាមពល kineticចលនាទៅមុខនៃរាងកាយ។ ការងារ និងថាមពលនៅក្នុងប្រព័ន្ធ SI នៃឯកតាត្រូវបានវាស់ជា joules (J)។
ថាមពលអាចត្រូវបានកំណត់មិនត្រឹមតែដោយចលនានៃសាកសពប៉ុណ្ណោះទេ ថែមទាំងដោយការរៀបចំ និងរូបរាងទៅវិញទៅមករបស់ពួកគេផងដែរ។ ថាមពលនេះត្រូវបានគេហៅថា សក្តានុពល.
ថាមពលដែលមានសក្តានុពលត្រូវបានផ្ទុកទាក់ទងគ្នាទៅវិញទៅមកដោយបន្ទុកពីរដែលតភ្ជាប់ដោយនិទាឃរដូវមួយ ឬដោយរាងកាយដែលមានទីតាំងនៅកម្ពស់ជាក់លាក់មួយពីលើផែនដី។ ឧទាហរណ៍ចុងក្រោយនេះ សំដៅលើថាមពលទំនាញផែនដី នៅពេលដែលរាងកាយផ្លាស់ទីពីកម្ពស់មួយពីលើផែនដីទៅមួយទៀត។ វាត្រូវបានគណនាតាមរូបមន្ត
ថាមពលមេកានិច។
ការពឹងផ្អែកនៃសន្ទុះលើល្បឿននៃចលនានៃសាកសពពីរ។ តើរាងកាយមួយណាមានម៉ាសធំជាង និងប៉ុន្មាន? 1) ម៉ាស់រាងកាយដូចគ្នា 2) ម៉ាស់រាងកាយ 1 ធំជាង 3.5 ដង 3) ម៉ាសរាងកាយ 2 ធំជាង 3.5 ដង 4) យោងតាមក្រាហ្វ ម៉ាស់សាកសពមិនអាចប្រៀបធៀបបានទេ។
រំកិលក្នុងល្បឿន v វាបុកជាមួយនឹងដុំប្លាស្ទិកដែលនៅសល់ទំហំ ២ តោន។ បន្ទាប់ពីផលប៉ះពាល់ បាល់នៅជាប់គ្នា ហើយផ្លាស់ទីជាមួយគ្នា។ តើល្បឿននៃចលនារបស់ពួកគេគឺជាអ្វី? 1) v/3 2) 2v/3 3) v/2 4) មិនមានទិន្នន័យគ្រប់គ្រាន់ដើម្បីឆ្លើយ
ពួកវាផ្លាស់ទីតាមបណ្តោយផ្លូវដែក rectilinear ជាមួយនឹងល្បឿន ការពឹងផ្អែកនៃការព្យាករដែលនៅលើអ័ក្សស្របទៅនឹងផ្លូវដែកទាន់ពេលវេលាត្រូវបានបង្ហាញនៅក្នុងរូបភាព។ បន្ទាប់ពី 20 វិនាទីការភ្ជាប់ដោយស្វ័យប្រវត្តិបានកើតឡើងរវាងរថយន្ត។ តើគោយន្តកន្ត្រៃទាំងពីរនឹងទៅទិសណាក្នុងល្បឿនប៉ុន្មាន? 1) 1.4 m/s ឆ្ពោះទៅរកចលនាដំបូង 1. 2) 0.2 m/s ឆ្ពោះទៅរកចលនាដំបូង 1. 3) 1.4 m/s ឆ្ពោះទៅរកចលនាដំបូង 2. 4) 0.2 m/s ក្នុងទិសដៅនៃចលនាដំបូង ២.
តម្លៃដែលបង្ហាញថាការងារណាដែលអាចធ្វើបានដោយរាងកាយ ការងារដ៏ល្អឥតខ្ចោះគឺស្មើនឹងការផ្លាស់ប្តូរថាមពលរបស់រាងកាយ
យោងតាមសមីការ x: = 2 + 30 t − 2 t2 សរសេរជា SI ។ ទំងន់រាងកាយ 5 គីឡូក្រាម។ តើថាមពល kinetic នៃរាងកាយ 3 វិនាទីបន្ទាប់ពីការចាប់ផ្តើមចលនាគឺជាអ្វី? 1) 810 J 2) 1440 J 3) 3240 J 4) 4410 J
រាងកាយខូចទ្រង់ទ្រាយ
នេះត្រូវបានបញ្ចប់ការងារ 2 J. តើការងារអ្វីដែលគួរធ្វើដើម្បីលាតសន្ធឹងនិទាឃរដូវមួយទៀត 4 សង់ទីម៉ែត្រ 1) 16 J 2) 4 J 3) 8 J 4) 2 J
កំណត់ថាមពល kinetic Ek ដែលរាងកាយមាននៅផ្នែកខាងលើនៃគន្លង (មើលរូប)? 1) EK=mgH 2) EK=m(V0)2/2 + mgh-mgH 3) EK=mgH-mgh 4) EK=m(V0)2/2 + mgH
ល្បឿនដំបូងដូចគ្នា។ លើកទីមួយ វ៉ិចទ័រល្បឿនរបស់បាល់ត្រូវបានដឹកនាំបញ្ឈរចុះក្រោម លើកទីពីរ - បញ្ឈរឡើងលើ លើកទីបី - ផ្ដេក។ មិនអើពើនឹងភាពធន់នឹងខ្យល់។ ម៉ូឌុលនៃល្បឿនបាល់នៅពេលជិតដល់ដីនឹងមានៈ 1) ច្រើននៅក្នុងករណីទី 1 2) បន្ថែមទៀតនៅក្នុងករណីទីពីរ 3) ច្រើនទៀតនៅក្នុងករណីទីបី 4) ដូចគ្នាក្នុងគ្រប់ករណីទាំងអស់។
រូបថតនៃការរៀបចំសម្រាប់សិក្សាការរអិលនៃរទេះរុញដែលមានទម្ងន់ 40 ក្រាមតាមបណ្តោយយន្តហោះដែលមានទំនោរនៅមុំ 30º។ នៅពេលចាប់ផ្តើមចលនា ឧបករណ៏ខាងលើនឹងបើកនាឡិកាបញ្ឈប់។ នៅពេលដែលការដឹកជញ្ជូនឆ្លងកាត់ឧបករណ៏ខាងក្រោម នាឡិកាឈប់។ ប៉ាន់ប្រមាណបរិមាណនៃកំដៅដែលបានបញ្ចេញនៅពេលដែលទូរថភ្លើងរអិលចុះក្រោមយន្តហោះទំនោររវាងឧបករណ៍ចាប់សញ្ញា។
វាចុះពីចំណុចទី 1 ដល់ចំណុចទី 3 (រូបភាព) ។ តើថាមពល kinetic របស់វាមានតម្លៃធំបំផុតនៅត្រង់ចំណុចណា? 1) នៅចំណុច 1. 2) នៅចំណុច 2. 3) នៅចំណុច 3. 4) នៅគ្រប់ចំនុចទាំងអស់ តម្លៃថាមពលគឺដូចគ្នា។
ពួកគេឡើងតាមជម្រាលទល់មុខរបស់វាដល់កម្ពស់ 2 ម៉ែត្រ (ដល់ចំណុច 2 ក្នុងរូបភាព) ហើយឈប់។ ទំងន់នៃស្លាយគឺ 5 គីឡូក្រាម។ ល្បឿនរបស់ពួកគេនៅបាតជ្រោះគឺ 10 m/s ។ តើថាមពលមេកានិកសរុបនៃ sled បានផ្លាស់ប្តូរនៅពេលផ្លាស់ទីពីចំណុច 1 ដល់ចំណុច 2 ? 1) មិនបានផ្លាស់ប្តូរ។ 2) កើនឡើង 100 J. 3) ថយចុះ 100 J. 4) ថយចុះ 150 J. 2
សន្ទុះរាងកាយ
សន្ទុះនៃរាងកាយគឺជាបរិមាណស្មើនឹងផលិតផលនៃម៉ាសនៃរាងកាយ និងល្បឿនរបស់វា។
វាគួរតែត្រូវបានចងចាំក្នុងចិត្តថាយើងកំពុងនិយាយអំពីរាងកាយដែលអាចត្រូវបានតំណាងជាចំណុចសម្ភារៈមួយ។ សន្ទុះនៃរាងកាយ ($p$) ត្រូវបានគេហៅថាសន្ទុះ។ គំនិតនៃសន្ទុះត្រូវបានបញ្ចូលទៅក្នុងរូបវិទ្យាដោយ René Descartes (1596-1650) ។ ពាក្យ "ជំរុញ" បានបង្ហាញខ្លួននៅពេលក្រោយ (ការជំរុញជាភាសាឡាតាំងមានន័យថា "រុញ") ។ សន្ទុះគឺជាបរិមាណវ៉ិចទ័រ (ដូចជាល្បឿន) ហើយត្រូវបានបង្ហាញដោយរូបមន្ត៖
$p↖(→)=mυ↖(→)$
ទិសដៅនៃវ៉ិចទ័រសន្ទុះតែងតែស្របគ្នានឹងទិសដៅនៃល្បឿន។
ឯកតានៃសន្ទុះនៅក្នុង SI គឺជាសន្ទុះនៃរាងកាយដែលមានម៉ាស់ $1$ kg ផ្លាស់ទីក្នុងល្បឿន $1$ m/s ដូច្នេះឯកតានៃសន្ទុះគឺ $1$ kg $·$ m/s ។
ប្រសិនបើកម្លាំងថេរធ្វើសកម្មភាពលើរាងកាយ (ចំណុចសម្ភារៈ) ក្នុងចន្លោះពេល $∆t$ នោះការបង្កើនល្បឿនក៏នឹងថេរដែរ៖
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
ដែល $(υ_1)↖(→)$ និង $(υ_2)↖(→)$ គឺជាល្បឿនដំបូង និងចុងក្រោយនៃរាងកាយ។ ការជំនួសតម្លៃនេះទៅក្នុងកន្សោមនៃច្បាប់ទីពីររបស់ញូតុន យើងទទួលបាន៖
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
ការបើកតង្កៀប និងការប្រើប្រាស់កន្សោមសម្រាប់សន្ទុះនៃរាងកាយ យើងមាន៖
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
នៅទីនេះ $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ គឺជាការផ្លាស់ប្តូរសន្ទុះតាមពេលវេលា $∆t$។ បន្ទាប់មកសមីការមុនក្លាយជា៖
$∆p↖(→)=F↖(→)∆t$
កន្សោម $∆p↖(→)=F↖(→)∆t$ គឺជាតំណាងគណិតវិទ្យានៃច្បាប់ទីពីររបស់ញូតុន។
ផលិតផលនៃកម្លាំងនិងរយៈពេលរបស់វាត្រូវបានគេហៅថា សន្ទុះនៃកម្លាំង. នោះហើយជាមូលហេតុដែល ការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃចំណុចមួយគឺស្មើនឹងការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃកម្លាំងដែលធ្វើសកម្មភាពលើវា។
កន្សោម $∆p↖(→)=F↖(→)∆t$ ត្រូវបានគេហៅថា សមីការចលនារាងកាយ. វាគួរតែត្រូវបានកត់សម្គាល់ថាសកម្មភាពដូចគ្នា - ការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃចំណុចមួយ - អាចទទួលបានដោយកម្លាំងតូចមួយក្នុងរយៈពេលយូរនិងដោយកម្លាំងធំក្នុងរយៈពេលតូចមួយនៃពេលវេលា។
Impulse នៃប្រព័ន្ធ tel. ច្បាប់នៃការផ្លាស់ប្តូរសន្ទុះ
កម្លាំងរុញច្រាន (សន្ទុះ) នៃប្រព័ន្ធមេកានិក គឺជាវ៉ិចទ័រស្មើនឹងផលបូកនៃកម្លាំងរុញច្រាននៃចំណុចសម្ភារៈទាំងអស់នៃប្រព័ន្ធនេះ៖
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
ច្បាប់នៃការផ្លាស់ប្តូរ និងការអភិរក្សនៃសន្ទុះគឺជាផលវិបាកនៃច្បាប់ទីពីរ និងទីបីរបស់ញូតុន។
ពិចារណាប្រព័ន្ធមួយដែលមានតួពីរ។ កម្លាំង ($F_(12)$ និង $F_(21)$ នៅក្នុងរូប ដែលរាងកាយនៃប្រព័ន្ធមានអន្តរកម្មជាមួយគ្នា ត្រូវបានគេហៅថាផ្ទៃក្នុង។
អនុញ្ញាតឱ្យបន្ថែមលើកម្លាំងខាងក្នុង កម្លាំងខាងក្រៅ $(F_1)↖(→)$ និង $(F_2)↖(→)$ ធ្វើសកម្មភាពលើប្រព័ន្ធ។ សម្រាប់តួនីមួយៗ សមីការ $∆p↖(→)=F↖(→)∆t$ អាចត្រូវបានសរសេរ។ ការបន្ថែមផ្នែកខាងឆ្វេង និងខាងស្តាំនៃសមីការទាំងនេះ យើងទទួលបាន៖
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
យោងតាមច្បាប់ទីបីរបស់ញូតុន $(F_(12))↖(→)=-(F_(21))↖(→)$ ។
អាស្រ័យហេតុនេះ
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
នៅផ្នែកខាងឆ្វេងគឺជាផលបូកធរណីមាត្រនៃការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃតួទាំងអស់នៃប្រព័ន្ធ ស្មើនឹងការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃប្រព័ន្ធខ្លួនវា - $(∆p_(syst))↖(→)$ ។ ភាពស្មើគ្នា $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ អាចសរសេរបាន៖
$(∆p_(sys))↖(→)=F↖(→)∆t$
ដែល $F↖(→)$ គឺជាផលបូកនៃកម្លាំងខាងក្រៅទាំងអស់ដែលធ្វើសកម្មភាពលើរាងកាយ។ លទ្ធផលដែលទទួលបានមានន័យថាមានតែកម្លាំងខាងក្រៅប៉ុណ្ណោះដែលអាចផ្លាស់ប្តូរសន្ទុះនៃប្រព័ន្ធបាន ហើយការផ្លាស់ប្តូរសន្ទុះនៃប្រព័ន្ធត្រូវបានដឹកនាំតាមរបៀបដូចគ្នាទៅនឹងកម្លាំងខាងក្រៅសរុប។ នេះគឺជាខ្លឹមសារនៃច្បាប់នៃការផ្លាស់ប្តូរនៅក្នុងសន្ទុះនៃប្រព័ន្ធមេកានិចមួយ។
កម្លាំងខាងក្នុងមិនអាចផ្លាស់ប្តូរសន្ទុះសរុបនៃប្រព័ន្ធបានទេ។ ពួកគេគ្រាន់តែផ្លាស់ប្តូរការជំរុញនៃសាកសពបុគ្គលនៃប្រព័ន្ធ។
ច្បាប់នៃការអភិរក្សសន្ទុះ
ពីសមីការ $(∆p_(syst))↖(→)=F↖(→)∆t$ ច្បាប់អភិរក្សសន្ទុះដូចខាងក្រោម។ ប្រសិនបើគ្មានកម្លាំងខាងក្រៅធ្វើសកម្មភាពលើប្រព័ន្ធទេ នោះផ្នែកខាងស្តាំនៃសមីការ $(∆p_(syst))↖(→)=F↖(→)∆t$ រលាយបាត់ ដែលមានន័យថាសន្ទុះសរុបនៃប្រព័ន្ធនៅតែមិនផ្លាស់ប្តូរ។ :
$(∆p_(sys))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
ប្រព័ន្ធដែលមិនមានកម្លាំងខាងក្រៅធ្វើសកម្មភាព ឬលទ្ធផលនៃកម្លាំងខាងក្រៅស្មើនឹងសូន្យត្រូវបានគេហៅថា បិទ។
ច្បាប់នៃការអភិរក្សសន្ទុះចែងថា:
សន្ទុះសរុបនៃប្រព័ន្ធបិទជិតនៃសាកសពនៅតែថេរសម្រាប់អន្តរកម្មនៃសាកសពនៃប្រព័ន្ធជាមួយគ្នាទៅវិញទៅមក។
លទ្ធផលដែលទទួលបានគឺត្រឹមត្រូវសម្រាប់ប្រព័ន្ធដែលមានចំនួនសាកសពតាមអំពើចិត្ត។ ប្រសិនបើផលបូកនៃកម្លាំងខាងក្រៅមិនស្មើនឹងសូន្យ ប៉ុន្តែផលបូកនៃការព្យាកររបស់ពួកគេលើទិសដៅខ្លះគឺស្មើនឹងសូន្យ នោះការព្យាករណ៍នៃសន្ទុះនៃប្រព័ន្ធលើទិសដៅនេះមិនផ្លាស់ប្តូរទេ។ ដូច្នេះ ជាឧទាហរណ៍ ប្រព័ន្ធនៃសាកសពនៅលើផ្ទៃផែនដីមិនអាចត្រូវបានគេចាត់ទុកថាបិទនោះទេ ដោយសារតែកម្លាំងទំនាញដែលធ្វើសកម្មភាពលើសាកសពទាំងអស់ ទោះជាយ៉ាងណាក៏ដោយ ផលបូកនៃការព្យាករណ៍នៃកម្លាំងរុញច្រានលើទិសផ្ដេកអាចនៅតែមិនផ្លាស់ប្តូរ (ក្នុងករណីដែលមិនមាន នៃការកកិត) ព្រោះក្នុងទិសដៅនេះកម្លាំងទំនាញមិនត្រឹមត្រូវទេ។
ការរុញច្រានយន្តហោះ
ពិចារណាឧទាហរណ៍ដែលបញ្ជាក់ពីសុពលភាពនៃច្បាប់នៃការអភិរក្សសន្ទុះ។
ចូរយកប៉េងប៉ោងកៅស៊ូរបស់កុមារមកបំប៉ោងវាទៅ។ យើងនឹងឃើញថា នៅពេលដែលខ្យល់ចាប់ផ្តើមចេញពីវាក្នុងទិសដៅមួយ នោះប៉េងប៉ោងខ្លួនឯងនឹងហោះហើរក្នុងទិសដៅផ្សេង។ ចលនារបស់បាល់គឺជាឧទាហរណ៍នៃការជំរុញដោយយន្តហោះ។ វាត្រូវបានពន្យល់ដោយច្បាប់នៃការអភិរក្សនៃសន្ទុះ: សន្ទុះសរុបនៃប្រព័ន្ធ "បាល់បូកខ្យល់នៅក្នុងវា" មុនពេលលំហូរចេញនៃខ្យល់គឺសូន្យ; វាត្រូវតែនៅតែស្មើសូន្យក្នុងអំឡុងពេលចលនា; ដូច្នេះ បាល់ផ្លាស់ទីក្នុងទិសដៅផ្ទុយទៅនឹងទិសដៅនៃលំហូរចេញនៃយន្តហោះ ហើយជាមួយនឹងល្បឿនដែលសន្ទុះរបស់វាស្មើនឹងតម្លៃដាច់ខាតទៅនឹងសន្ទុះនៃយន្តហោះប្រតិកម្ម។
ការជំរុញយន្តហោះហៅថាចលនានៃរាងកាយដែលកើតឡើងនៅពេលដែលផ្នែកមួយរបស់វាបំបែកចេញពីវាក្នុងល្បឿនណាមួយ។ ដោយសារតែច្បាប់នៃការអភិរក្សនៃសន្ទុះទិសដៅនៃចលនានៃរាងកាយគឺផ្ទុយទៅនឹងទិសដៅនៃចលនានៃផ្នែកដែលបំបែក។
ការហោះហើររ៉ុក្កែតគឺផ្អែកលើគោលការណ៍នៃការជំរុញយន្តហោះ។ រ៉ុក្កែតអវកាសទំនើប គឺជាយន្តហោះដែលស្មុគស្មាញបំផុត។ ម៉ាស់របស់គ្រាប់រ៉ុក្កែត គឺជាផលបូកនៃម៉ាសនៃអង្គធាតុរាវដែលធ្វើការ (ឧ. ឧស្ម័នក្តៅ ដែលកើតចេញពីការចំហេះនៃឥន្ធនៈ និងបានច្រានចេញក្នុងទម្រង់ជាស្ទ្រីមយន្តហោះ) និងចុងក្រោយ ឬដូចដែលពួកគេនិយាយថា ម៉ាស់ "ស្ងួត"។ នៃគ្រាប់រ៉ុក្កែត ដែលនៅសេសសល់បន្ទាប់ពីការបញ្ចោញសារធាតុរាវការងារចេញពីគ្រាប់រ៉ុក្កែត។
នៅពេលដែលយន្តហោះប្រតិកម្មឧស្ម័នត្រូវបានច្រានចេញពីរ៉ុក្កែតក្នុងល្បឿនលឿន គ្រាប់រ៉ុក្កែតខ្លួនវាប្រញាប់ប្រញាល់ក្នុងទិសដៅផ្ទុយ។ យោងតាមច្បាប់អភិរក្សសន្ទុះ សន្ទុះ $m_(p)υ_p$ ដែលទទួលបានដោយរ៉ុក្កែតត្រូវតែស្មើនឹងសន្ទុះ $m_(ហ្គាស) υ_(ឧស្ម័ន)$ នៃឧស្ម័នដែលបានបញ្ចេញ៖
$m_(p)υ_p=m_(ឧស្ម័ន) υ_(ឧស្ម័ន)$
វាធ្វើតាមល្បឿននៃគ្រាប់រ៉ុក្កែត
$υ_p=((m_(ឧស្ម័ន))/(m_p)) υ_(ឧស្ម័ន)$
វាអាចត្រូវបានគេមើលឃើញពីរូបមន្តនេះថា ល្បឿននៃឧស្ម័នដែលបញ្ចេញចេញកាន់តែច្រើន និងសមាមាត្រនៃម៉ាសនៃអង្គធាតុរាវដំណើរការកាន់តែច្រើន (ពោលគឺម៉ាស់ឥន្ធនៈ) ដល់ម៉ាស់ចុងក្រោយ ("ស្ងួត") នៃគ្រាប់រ៉ុក្កែត។ ល្បឿនរ៉ុក្កែតកាន់តែធំ។
រូបមន្ត $υ_p=((m_(ឧស្ម័ន))/(m_p))·υ_(ឧស្ម័ន)$ គឺប្រហាក់ប្រហែល។ វាមិនគិតថានៅពេលឥន្ធនៈឆេះនោះ ម៉ាស់របស់គ្រាប់រ៉ុក្កែតហោះកាន់តែតូចទៅៗ។ រូបមន្តពិតប្រាកដសម្រាប់ល្បឿនរ៉ុក្កែតមួយត្រូវបានទទួលនៅឆ្នាំ 1897 ដោយ K. E. Tsiolkovsky ហើយដាក់ឈ្មោះរបស់គាត់។
បង្ខំការងារ
ពាក្យ "ការងារ" ត្រូវបានបញ្ចូលទៅក្នុងរូបវិទ្យានៅឆ្នាំ 1826 ដោយអ្នកវិទ្យាសាស្ត្របារាំង J. Poncelet ។ ប្រសិនបើនៅក្នុងជីវិតប្រចាំថ្ងៃ មានតែកម្លាំងពលកម្មរបស់មនុស្សទេដែលត្រូវបានគេហៅថាការងារ នោះនៅក្នុងរូបវិទ្យា និងជាពិសេសនៅក្នុងមេកានិច វាត្រូវបានទទួលយកជាទូទៅថាការងារត្រូវបានធ្វើឡើងដោយកម្លាំង។ បរិមាណការងារជាធម្មតាត្រូវបានបញ្ជាក់ដោយអក្សរ $A$ ។
បង្ខំការងារ- នេះគឺជារង្វាស់នៃសកម្មភាពនៃកម្លាំង អាស្រ័យលើម៉ូឌុល និងទិសដៅរបស់វា ក៏ដូចជាលើការផ្លាស់ទីលំនៅចំណុចនៃការអនុវត្តកម្លាំង។ សម្រាប់កម្លាំងថេរ និងចលនា rectilinear ការងារត្រូវបានកំណត់ដោយសមភាព៖
$A=F|∆r↖(→)|cosα$
ដែល $F$ គឺជាកម្លាំងដែលធ្វើសកម្មភាពលើរាងកាយ $∆r↖(→)$ គឺជាការផ្លាស់ទីលំនៅ $α$ គឺជាមុំរវាងកម្លាំង និងការផ្លាស់ទីលំនៅ។

ការងាររបស់កម្លាំងគឺស្មើនឹងផលិតផលនៃម៉ូឌុលនៃកម្លាំង និងការផ្លាស់ទីលំនៅ និងកូស៊ីនុសនៃមុំរវាងពួកវា ពោលគឺផលិតផលមាត្រដ្ឋាននៃវ៉ិចទ័រ $F↖(→)$ និង $∆r↖(→)$ ។
ការងារគឺជាបរិមាណមាត្រដ្ឋាន។ ប្រសិនបើ $α 0$ ហើយប្រសិនបើ $90°
នៅពេលដែលកម្លាំងជាច្រើនធ្វើសកម្មភាពលើរាងកាយមួយ ការងារសរុប (ផលបូកនៃការងាររបស់កម្លាំងទាំងអស់) គឺស្មើនឹងការងារនៃកម្លាំងលទ្ធផល។
ឯកតា SI នៃការងារគឺ ជូល។($1$J)។ $1$ J គឺជាការងារដែលធ្វើដោយកម្លាំង $1$ N នៅលើផ្លូវ $1$m ក្នុងទិសដៅនៃកម្លាំងនេះ។ អង្គភាពនេះត្រូវបានដាក់ឈ្មោះតាមអ្នកវិទ្យាសាស្ត្រអង់គ្លេស J. Joule (1818-1889): $1$ J = $1$ N $·$ m. Kilojoules និង millijoules ត្រូវបានគេប្រើជាញឹកញាប់ផងដែរ: $1$ kJ $= 1,000$ J, $1$ mJ $ = 0.001$ J.
ការងារទំនាញផែនដី
ចូរយើងពិចារណាលើដងខ្លួនរអិលតាមយន្តហោះទំនោរដែលមានមុំទំនោរ $α$ និងកម្ពស់ $H$ ។

យើងបង្ហាញ $∆x$ នៅក្នុងលក្ខខណ្ឌនៃ $H$ និង $α$:
$∆x=(H)/(sinα)$
ដោយពិចារណាថាទំនាញ $F_т=mg$ បង្កើតមុំមួយ ($90° - α$) ជាមួយនឹងទិសដៅនៃចលនា ដោយប្រើរូបមន្ត $∆x=(H)/(sin)α$ យើងទទួលបានកន្សោមសម្រាប់ការងារទំនាញ $A_g$៖
$A_g=mg cos(90°-α)(H)/(sinα)=mgH$
ពីរូបមន្តនេះគេអាចមើលឃើញថាការងារទំនាញអាស្រ័យលើកម្ពស់ ហើយមិនអាស្រ័យលើមុំទំនោរនៃយន្តហោះនោះទេ។
ពីនេះវាដូចខាងក្រោម:
- ការងារទំនាញមិនអាស្រ័យលើរូបរាងនៃគន្លងដែលរាងកាយផ្លាស់ទីនោះទេប៉ុន្តែបានតែនៅលើទីតាំងដំបូងនិងចុងក្រោយនៃរាងកាយ;
- នៅពេលដែលរាងកាយផ្លាស់ទីតាមគន្លងបិទជិត ការងារទំនាញគឺសូន្យ ពោលគឺទំនាញគឺជាកម្លាំងអភិរក្ស (កម្លាំងដែលមានទ្រព្យសម្បត្តិនេះត្រូវបានគេហៅថា អភិរក្ស)។
ការងារនៃកម្លាំងប្រតិកម្ម, គឺសូន្យព្រោះកម្លាំងប្រតិកម្ម ($N$) ត្រូវបានដឹកនាំកាត់កែងទៅនឹងការផ្លាស់ទីលំនៅ $∆x$។
ការងាររបស់កម្លាំងកកិត
កម្លាំងកកិតត្រូវបានតម្រង់ផ្ទុយទៅនឹងការផ្លាស់ទីលំនៅ $∆x$ ហើយធ្វើមុំ $180°$ ជាមួយវា ដូច្នេះការងាររបស់កម្លាំងកកិតគឺអវិជ្ជមាន៖
$A_(tr)=F_(tr)∆x cos180°=-F_(tr) ∆x$
ចាប់តាំងពី $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα), $ បន្ទាប់មក
$A_(tr)=μmgHctgα$
ការងាររបស់កម្លាំងបត់បែន
អនុញ្ញាតឱ្យកម្លាំងខាងក្រៅ $F↖(→)$ ធ្វើសកម្មភាពលើនិទាឃរដូវដែលមិនលាតសន្ធឹង $l_0$ ដោយលាតសន្ធឹងដោយ $∆l_0=x_0$ ។ នៅក្នុងទីតាំង $x=x_0F_(control)=kx_0$ ។ បន្ទាប់ពីការបញ្ចប់នៃកម្លាំង $F↖(→)$ នៅចំណុច $x_0$ និទាឃរដូវត្រូវបានបង្ហាប់ក្រោមសកម្មភាពរបស់កម្លាំង $F_(control)$ ។

អនុញ្ញាតឱ្យយើងកំណត់ការងាររបស់កម្លាំងយឺតនៅពេលដែលកូអរដោនេនៃចុងខាងស្តាំនៃនិទាឃរដូវផ្លាស់ប្តូរពី $х_0$ ទៅ $х$ ។ ចាប់តាំងពីកម្លាំងយឺតនៅក្នុងតំបន់នេះផ្លាស់ប្តូរលីនេអ៊ែរ នៅក្នុងច្បាប់របស់ Hooke តម្លៃមធ្យមរបស់វានៅក្នុងតំបន់នេះអាចត្រូវបានប្រើ៖
$F_(ex.av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
បន្ទាប់មកការងារ (ដោយគិតគូរពីការពិតដែលថាទិសដៅ $(F_(exp.av.))↖(→)$ និង $(∆x)↖(→)$ coincide) គឺស្មើនឹង៖
$A_(exerc)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
វាអាចត្រូវបានបង្ហាញថាទម្រង់នៃរូបមន្តចុងក្រោយមិនអាស្រ័យលើមុំរវាង $(F_(exp.av.))↖(→)$ និង $(∆x)↖(→)$ ទេ។ ការងាររបស់កម្លាំងយឺតអាស្រ័យតែលើការខូចទ្រង់ទ្រាយនៃនិទាឃរដូវនៅក្នុងរដ្ឋដំបូងនិងចុងក្រោយ។
ដូច្នេះ កម្លាំងយឺត ដូចជាទំនាញផែនដី គឺជាកម្លាំងអភិរក្ស។
អំណាចនៃកម្លាំង
ថាមពលគឺជាបរិមាណរូបវន្តដែលវាស់វែងដោយសមាមាត្រនៃការងារទៅនឹងរយៈពេលដែលវាត្រូវបានផលិត។
ម្យ៉ាងវិញទៀត ថាមពលបង្ហាញពីចំនួនការងារដែលត្រូវធ្វើក្នុងមួយឯកតានៃពេលវេលា (ក្នុង SI សម្រាប់ $1$s)។
ថាមពលត្រូវបានកំណត់ដោយរូបមន្ត៖
ដែល $N$ ជាអំណាច $A$ គឺជាការងារដែលបានធ្វើនៅក្នុងពេលវេលា $∆t$ ។
ការជំនួស $A=F|(∆r)↖(→)|cosα$ ទៅក្នុងរូបមន្ត $N=(A)/(∆t)$ ជំនួសឱ្យការងារ $A$ យើងទទួលបាន៖
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
ថាមពលគឺស្មើនឹងផលិតផលនៃម៉ូឌុលនៃវ៉ិចទ័រកម្លាំង និងល្បឿន និងកូស៊ីនុសនៃមុំរវាងវ៉ិចទ័រទាំងនេះ។
ថាមពលនៅក្នុងប្រព័ន្ធ SI ត្រូវបានវាស់ជាវ៉ាត់ (W) ។ មួយវ៉ាត់ ($1$ W) គឺជាថាមពលដែល $1$ J នៃការងារត្រូវបានធ្វើក្នុង $1$s: $1$ W $= 1$ J/s ។
អង្គភាពនេះត្រូវបានដាក់ឈ្មោះតាមអ្នកបង្កើតជនជាតិអង់គ្លេស J. Watt (វ៉ាត់) ដែលបានសាងសង់ម៉ាស៊ីនចំហាយទឹកដំបូង។ J. Watt ខ្លួនគាត់ (1736-1819) បានប្រើឯកតាផ្សេងគ្នានៃថាមពល - សេះ (hp) ដែលគាត់បានណែនាំដើម្បីអាចប្រៀបធៀបដំណើរការរបស់ម៉ាស៊ីនចំហាយទឹកនិងសេះ: $ 1 $ hp ។ $= 735.5$ ថ្ងៃអង្គារ។
ក្នុងបច្ចេកវិជ្ជា ឯកតាធំនៃថាមពលច្រើនតែត្រូវបានប្រើប្រាស់ - គីឡូវ៉ាត់ និងមេហ្គាវ៉ាត់៖ $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W ។
ថាមពល Kinetic ។ ច្បាប់នៃការផ្លាស់ប្តូរថាមពល kinetic
ប្រសិនបើរាងកាយ ឬសាកសពអន្តរកម្មជាច្រើន (ប្រព័ន្ធសាកសព) អាចដំណើរការបាន នោះពួកគេនិយាយថា ពួកគេមានថាមពល។
ពាក្យ "ថាមពល" (មកពីភាសាក្រិច។ ថាមពល - សកម្មភាពសកម្មភាព) ត្រូវបានគេប្រើជាញឹកញាប់នៅក្នុងជីវិតប្រចាំថ្ងៃ។ ដូច្នេះជាឧទាហរណ៍ មនុស្សដែលអាចធ្វើការបានរហ័សត្រូវបានគេហៅថាស្វាហាប់ដោយថាមពលដ៏អស្ចារ្យ។
ថាមពលដែលរាងកាយមានដោយសារចលនាត្រូវបានគេហៅថា ថាមពល kinetic ។
ដូចនៅក្នុងករណីនៃនិយមន័យនៃថាមពលជាទូទៅ យើងអាចនិយាយអំពីថាមពល kinetic ថាថាមពល kinetic គឺជាសមត្ថភាពរបស់រាងកាយដែលមានចលនាដើម្បីធ្វើការ។
អនុញ្ញាតឱ្យយើងរកឃើញថាមពល kinetic នៃតួនៃម៉ាស់ $m$ ផ្លាស់ទីដោយល្បឿន $υ$ ។ ដោយសារថាមពល kinetic គឺជាថាមពលដោយសារចលនា ស្ថានភាពសូន្យសម្រាប់វាគឺជាស្ថានភាពដែលរាងកាយសម្រាក។ ដោយបានរកឃើញការងារចាំបាច់ដើម្បីទាក់ទងល្បឿនដែលបានផ្តល់ឱ្យរាងកាយ យើងនឹងរកឃើញថាមពល kinetic របស់វា។
ដើម្បីធ្វើដូច្នេះ ចូរយើងគណនាការងារលើផ្នែកផ្លាស់ទីលំនៅ $∆r↖(→)$ នៅពេលដែលទិសដៅនៃវ៉ិចទ័រកម្លាំង $F↖(→)$ និងការផ្លាស់ទីលំនៅ $∆r↖(→)$ ស្របគ្នា។ ក្នុងករណីនេះការងារគឺ
ដែល $∆x=∆r$

សម្រាប់ចលនានៃចំណុចដែលមានការបង្កើនល្បឿន $α=const$ កន្សោមសម្រាប់ចលនាមានទម្រង់៖
$∆x=υ_1t+(នៅ^2)/(2),$
ដែល $υ_1$ គឺជាល្បឿនដំបូង។
ការជំនួសកន្សោមសម្រាប់ $∆x$ ពី $∆x=υ_1t+(at^2)/(2)$ ទៅក្នុងសមីការ $A=F ∆x$ ហើយដោយប្រើច្បាប់ទីពីររបស់ញូតុន $F=ma$ យើងទទួលបាន៖
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
បង្ហាញពីការបង្កើនល្បឿនក្នុងលក្ខខណ្ឌនៃ $υ_1$ ដំបូង និងចុងក្រោយ $υ_2$ ល្បឿន $a=(υ_2-υ_1)/(t)$ ហើយជំនួសទៅជា $A=ma(υ_1t+(at^2)/(2))=( mat)/ (2)(2υ_1+at)$ យើងមាន៖
$A=(m(υ_2-υ_1))/(2) (2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
ឥឡូវនេះ ស្មើនឹងល្បឿនដំបូងទៅសូន្យ៖ $υ_1=0$ យើងទទួលបានកន្សោមសម្រាប់ ថាមពល kinetic:
$E_K=(mυ)/(2)=(p^2)/(2m)$
ដូច្នេះរាងកាយដែលមានចលនាមានថាមពល kinetic ។ ថាមពលនេះគឺស្មើនឹងការងារដែលត្រូវធ្វើដើម្បីបង្កើនល្បឿននៃរាងកាយពីសូន្យទៅ $υ$ ។
ចាប់ពី $E_K=(mυ)/(2)=(p^2)/(2m)$ វាធ្វើតាមថា ការងាររបស់កម្លាំងដើម្បីផ្លាស់ទីរាងកាយពីទីតាំងមួយទៅទីតាំងមួយទៀត គឺស្មើនឹងការផ្លាស់ប្តូរថាមពល kinetic៖
$A=E_(K_2)-E_(K_1)=∆E_K$
សមភាព $A=E_(K_2)-E_(K_1)=∆E_K$ បង្ហាញ ទ្រឹស្តីបទស្តីពីការផ្លាស់ប្តូរថាមពល kinetic ។
ការផ្លាស់ប្តូរថាមពល kinetic នៃរាងកាយ(ចំណុចសម្ភារៈ) សម្រាប់រយៈពេលជាក់លាក់មួយគឺស្មើនឹងការងារដែលបានធ្វើក្នុងអំឡុងពេលនេះដោយកម្លាំងដែលធ្វើសកម្មភាពលើរាងកាយ។
ថាមពលសក្តានុពល
ថាមពលសក្តានុពលគឺជាថាមពលដែលកំណត់ដោយការរៀបចំទៅវិញទៅមកនៃសាកសពអន្តរកម្ម ឬផ្នែកនៃរាងកាយដូចគ្នា។
ដោយសារថាមពលត្រូវបានកំណត់ថាជាសមត្ថភាពរបស់រាងកាយក្នុងការធ្វើការងារ ថាមពលសក្តានុពលត្រូវបានកំណត់ពីធម្មជាតិថាជាការងាររបស់កម្លាំងដែលអាស្រ័យតែលើទីតាំងដែលទាក់ទងនៃសាកសពប៉ុណ្ណោះ។ នេះគឺជាការងារទំនាញ $A=mgh_1-mgh_2=mgH$ និងការងារនៃការបត់បែន៖
$A=(kx_0^2)/(2)-(kx^2)/(2)$
ថាមពលសក្តានុពលនៃរាងកាយអន្តរកម្មជាមួយផែនដីត្រូវបានគេហៅថាតម្លៃស្មើនឹងផលិតផលនៃម៉ាស់ $m$ នៃរាងកាយនេះ និងការបង្កើនល្បឿនធ្លាក់ចុះដោយឥតគិតថ្លៃ $g$ និងកម្ពស់ $h$ នៃរាងកាយពីលើផ្ទៃផែនដី៖
ថាមពលសក្តានុពលនៃរាងកាយដែលខូចទ្រង់ទ្រាយយឺតគឺតម្លៃស្មើនឹងពាក់កណ្តាលនៃផលិតផលនៃមេគុណនៃការបត់បែន (ភាពរឹង) $k$ នៃរាងកាយ និងការ៉េនៃការខូចទ្រង់ទ្រាយ $∆l$:
$E_p=(1)/(2)k∆l^2$
ការងារនៃកម្លាំងអភិរក្ស (ទំនាញផែនដី និងការបត់បែន) ដោយគិតគូរពី $E_p=mgh$ និង $E_p=(1)/(2)k∆l^2$ ត្រូវបានបង្ហាញដូចខាងក្រោម៖
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
រូបមន្តនេះអនុញ្ញាតឱ្យយើងផ្តល់និយមន័យទូទៅនៃថាមពលសក្តានុពល។
ថាមពលសក្តានុពលនៃប្រព័ន្ធគឺជាបរិមាណដែលអាស្រ័យលើទីតាំងនៃសាកសពការផ្លាស់ប្តូរដែលក្នុងអំឡុងពេលនៃការផ្លាស់ប្តូរប្រព័ន្ធពីស្ថានភាពដំបូងទៅរដ្ឋចុងក្រោយគឺស្មើនឹងការងាររបស់កងកម្លាំងអភិរក្សផ្ទៃក្នុងនៃប្រព័ន្ធ។ យកជាមួយសញ្ញាផ្ទុយ។
សញ្ញាដកនៅជ្រុងខាងស្តាំនៃសមីការ $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ មានន័យថានៅពេលដែលការងារត្រូវបានធ្វើដោយកម្លាំងផ្ទៃក្នុង ( ឧទាហរណ៍ ការធ្លាក់ខ្លួនប្រាណទៅដីក្រោមសកម្មភាពនៃទំនាញនៅក្នុងប្រព័ន្ធ "ថ្ម-ផែនដី") ថាមពលនៃប្រព័ន្ធថយចុះ។ ការងារ និងការផ្លាស់ប្តូរថាមពលសក្តានុពលនៅក្នុងប្រព័ន្ធតែងតែមានសញ្ញាផ្ទុយគ្នា។
ដោយសារការងារកំណត់តែការផ្លាស់ប្តូរថាមពលសក្តានុពល មានតែការផ្លាស់ប្តូរថាមពលប៉ុណ្ណោះដែលមានអត្ថន័យរូបវន្តនៅក្នុងមេកានិច។ ដូច្នេះជម្រើសនៃកម្រិតថាមពលសូន្យគឺបំពានហើយត្រូវបានកំណត់ដោយការពិចារណាលើភាពងាយស្រួលឧទាហរណ៍ភាពងាយស្រួលនៃការសរសេរសមីការដែលត្រូវគ្នា។
ច្បាប់នៃការផ្លាស់ប្តូរ និងការអភិរក្សថាមពលមេកានិក
ថាមពលមេកានិកសរុបនៃប្រព័ន្ធផលបូកនៃថាមពល kinetic និងសក្តានុពលរបស់វាត្រូវបានគេហៅថា:
វាត្រូវបានកំណត់ដោយទីតាំងនៃសាកសព (ថាមពលសក្តានុពល) និងល្បឿនរបស់វា (ថាមពល kinetic) ។
យោងទៅតាមទ្រឹស្តីបទថាមពល kinetic ។
$E_k-E_(k_1)=A_p+A_(pr),$
ដែលជាកន្លែងដែល $А_р$ គឺជាការងាររបស់កម្លាំងសក្តានុពល $А_(pr)$ គឺជាការងាររបស់កងកម្លាំងគ្មានសក្តានុពល។
នៅក្នុងវេន ការងារនៃកម្លាំងសក្តានុពលគឺស្មើនឹងភាពខុសគ្នានៃថាមពលសក្តានុពលនៃរាងកាយនៅក្នុងរដ្ឋ $E_(p_1)$ និងចុងក្រោយ $E_p$ ។ ជាមួយនឹងគំនិតនេះ យើងទទួលបានការបញ្ចេញមតិសម្រាប់ ច្បាប់នៃការផ្លាស់ប្តូរថាមពលមេកានិច៖
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
ដែលផ្នែកខាងឆ្វេងនៃសមភាពគឺជាការផ្លាស់ប្តូរថាមពលមេកានិកសរុប ហើយផ្នែកខាងស្តាំគឺជាការងាររបស់កម្លាំងគ្មានសក្តានុពល។
ដូច្នេះ ច្បាប់នៃការផ្លាស់ប្តូរថាមពលមេកានិចអាន៖
ការផ្លាស់ប្តូរថាមពលមេកានិកនៃប្រព័ន្ធគឺស្មើនឹងការងាររបស់កងកម្លាំងមិនសក្តានុពលទាំងអស់។
ប្រព័ន្ធមេកានិកដែលមានតែកម្លាំងដែលមានសក្តានុពលប៉ុណ្ណោះដែលធ្វើសកម្មភាពត្រូវបានគេហៅថាអភិរក្ស។
នៅក្នុងប្រព័ន្ធអភិរក្ស $A_(pr) = 0$ ។ នេះបង្កប់ន័យ ច្បាប់នៃការអភិរក្សថាមពលមេកានិច៖
នៅក្នុងប្រព័ន្ធអភិរក្សបិទជិត ថាមពលមេកានិកសរុបត្រូវបានរក្សាទុក (មិនផ្លាស់ប្តូរតាមពេលវេលា)៖
$E_k+E_p=E_(k_1)+E_(p_1)$
ច្បាប់នៃការអភិរក្សថាមពលមេកានិកគឺបានមកពីច្បាប់នៃមេកានិចញូតុន ដែលអាចអនុវត្តបានចំពោះប្រព័ន្ធនៃចំណុចសម្ភារៈ (ឬម៉ាក្រូភាគល្អិត)។
ទោះជាយ៉ាងណាក៏ដោយ ច្បាប់នៃការអភិរក្សថាមពលមេកានិកក៏មានសុពលភាពសម្រាប់ប្រព័ន្ធនៃមីក្រូភាគល្អិត ដែលច្បាប់របស់ញូតុនខ្លួនឯងលែងអនុវត្តទៀតហើយ។
ច្បាប់នៃការអភិរក្សថាមពលមេកានិចគឺជាផលវិបាកនៃភាពដូចគ្នានៃពេលវេលា។
ភាពស្របគ្នានៃពេលវេលាគឺថានៅក្រោមលក្ខខណ្ឌដំបូងដូចគ្នា ដំណើរនៃដំណើរការរាងកាយមិនអាស្រ័យលើពេលដែលលក្ខខណ្ឌទាំងនេះត្រូវបានបង្កើតឡើងនោះទេ។
ច្បាប់នៃការអភិរក្សថាមពលមេកានិកសរុបមានន័យថានៅពេលដែលថាមពល kinetic នៅក្នុងប្រព័ន្ធអភិរក្សផ្លាស់ប្តូរ ថាមពលសក្តានុពលរបស់វាក៏ត្រូវតែផ្លាស់ប្តូរដែរ ដូច្នេះហើយផលបូករបស់វានៅតែថេរ។ នេះមានន័យថាលទ្ធភាពនៃការបំប្លែងថាមពលមួយប្រភេទទៅជាថាមពលមួយទៀត។
យោងទៅតាមទម្រង់ផ្សេងៗនៃចលនានៃរូបធាតុ ប្រភេទផ្សេងគ្នានៃថាមពលត្រូវបានពិចារណា៖ មេកានិច ខាងក្នុង (ស្មើនឹងផលបូកនៃថាមពល kinetic នៃចលនាច្របូកច្របល់នៃម៉ូលេគុលដែលទាក់ទងទៅនឹងកណ្តាលនៃម៉ាសនៃរាងកាយ និងថាមពលសក្តានុពលនៃ អន្តរកម្មនៃម៉ូលេគុលជាមួយគ្នាទៅវិញទៅមក), អេឡិចត្រូម៉ាញ៉េទិច, គីមី (ដែលរួមមានថាមពល kinetic នៃចលនារបស់អេឡិចត្រុង និងថាមពលអគ្គិសនីនៃអន្តរកម្មរបស់ពួកគេជាមួយគ្នាទៅវិញទៅមក និងជាមួយស្នូលអាតូមិច) ថាមពលនុយក្លេអ៊ែរ។ល។ ដោយគិតទុកជាមុនថា ការបែងចែកថាមពលទៅជាប្រភេទផ្សេងគ្នាគឺខុស។
បាតុភូតធម្មជាតិជាធម្មតាត្រូវបានអមដោយការបំប្លែងថាមពលប្រភេទមួយទៅជាថាមពលមួយទៀត។ ដូច្នេះ ជាឧទាហរណ៍ ការកកិតនៃផ្នែកនៃយន្តការផ្សេងៗនាំទៅដល់ការបំប្លែងថាមពលមេកានិកទៅជាកំដៅ ពោលគឺទៅជា ថាមពលខាងក្នុង។នៅក្នុងម៉ាស៊ីនកំដៅ, នៅលើផ្ទុយមកវិញ, ថាមពលខាងក្នុងត្រូវបានបម្លែងទៅជាថាមពលមេកានិច; នៅក្នុងកោសិកា galvanic ថាមពលគីមីត្រូវបានបំប្លែងទៅជាថាមពលអគ្គិសនី។ល។
បច្ចុប្បន្ននេះ គំនិតនៃថាមពល គឺជាគំនិតជាមូលដ្ឋានមួយនៃរូបវិទ្យា។ គំនិតនេះត្រូវបានភ្ជាប់ដោយ inextricably ជាមួយនឹងគំនិតនៃការផ្លាស់ប្តូរនៃទម្រង់មួយនៃចលនាទៅជាមួយផ្សេងទៀត។
នេះជារបៀបដែលគំនិតនៃថាមពលត្រូវបានបង្កើតឡើងនៅក្នុងរូបវិទ្យាទំនើប៖
ថាមពលគឺជារង្វាស់បរិមាណទូទៅនៃចលនា និងអន្តរកម្មនៃរូបធាតុគ្រប់ប្រភេទ។ ថាមពលមិនកើតចេញពីអ្វីទាំងអស់ហើយមិនបាត់ទៅវិញទេ វាអាចឆ្លងពីទម្រង់មួយទៅទម្រង់មួយប៉ុណ្ណោះ។ គំនិតនៃថាមពលភ្ជាប់ជាមួយបាតុភូតទាំងអស់នៃធម្មជាតិ។
យន្តការសាមញ្ញ។ ប្រសិទ្ធភាពនៃយន្តការ
យន្តការសាមញ្ញ គឺជាឧបករណ៍ដែលផ្លាស់ប្តូរទំហំ ឬទិសដៅនៃកម្លាំងដែលបានអនុវត្តទៅលើរាងកាយ។
ពួកវាត្រូវបានប្រើដើម្បីផ្លាស់ទី ឬលើកបន្ទុកធំដោយមានការខិតខំប្រឹងប្រែងតិចតួច។ ទាំងនេះរួមបញ្ចូលដងថ្លឹង និងពូជរបស់វា - ប្លុក (ចល័ត និងថេរ) ច្រកទ្វារ យន្តហោះទំនោរ និងពូជរបស់វា - ក្រូចឆ្មារ វីស។ល។
ដៃចង្កូត។ ក្បួនដង្ហែ
ដងថ្លឹងគឺជាតួរឹងដែលមានសមត្ថភាពបង្វិលជុំវិញជំនួយថេរ។

ច្បាប់អានុភាពនិយាយថា៖
ដងថ្លឹងស្ថិតក្នុងលំនឹង ប្រសិនបើកម្លាំងដែលបានអនុវត្តទៅលើវាមានសមាមាត្រច្រាសទៅនឹងដៃរបស់ពួកគេ៖
$(F_2)/(F_1)=(l_1)/(l_2)$
ពីរូបមន្ត $(F_2)/(F_1)=(l_1)/(l_2)$ អនុវត្តទ្រព្យសម្បត្តិសមាមាត្រទៅវា (ផលិតផលនៃលក្ខខណ្ឌខ្លាំងនៃសមាមាត្រគឺស្មើនឹងផលិតផលនៃលក្ខខណ្ឌកណ្តាលរបស់វា) យើង អាចទទួលបានរូបមន្តដូចខាងក្រោមៈ
ប៉ុន្តែ $F_1l_1=M_1$ គឺជាពេលវេលានៃកម្លាំងដែលទំនោរទៅបង្វិលដងថ្លឹងតាមទ្រនិចនាឡិកា ហើយ $F_2l_2=M_2$ គឺជាពេលវេលានៃកម្លាំងដែលទំនោរទៅបង្វិលដងថ្លឹងច្រាសទ្រនិចនាឡិកា។ ដូច្នេះ $M_1=M_2$ ដែលត្រូវបង្ហាញ។
ដង្កៀបចាប់ផ្ដើមប្រើដោយមនុស្សនៅសម័យបុរាណ។ ដោយមានជំនួយរបស់វា វាអាចធ្វើទៅបានដើម្បីលើកបន្ទះថ្មធ្ងន់ៗកំឡុងពេលសាងសង់ពីរ៉ាមីតនៅប្រទេសអេហ្ស៊ីបបុរាណ។ បើគ្មានអានុភាព វានឹងមិនអាចទៅរួចនោះទេ។ ជាឧទាហរណ៍ សម្រាប់ការសាងសង់ពីរ៉ាមីត Cheops ដែលមានកម្ពស់ 147$ m ដុំថ្មជាងពីរលានត្រូវបានប្រើប្រាស់ ដែលតូចបំផុតមានទម្ងន់ 2.5$ តោន!
នាពេលបច្ចុប្បន្ននេះ ឡេវត្រូវបានប្រើប្រាស់យ៉ាងទូលំទូលាយទាំងក្នុងការផលិត (ឧទាហរណ៍ ស្ទូច) និងក្នុងជីវិតប្រចាំថ្ងៃ (កន្ត្រៃ កាត់ខ្សែ ជញ្ជីង)។
ប្លុកថេរ
សកម្មភាពនៃប្លុកថេរគឺស្រដៀងគ្នាទៅនឹងសកម្មភាពនៃ lever ដែលមានអានុភាពស្មើគ្នា៖ $l_1=l_2=r$ ។ កម្លាំងដែលបានអនុវត្ត $F_1$ គឺស្មើនឹងបន្ទុក $F_2$ ហើយលក្ខខណ្ឌលំនឹងគឺ៖
ប្លុកថេរប្រើនៅពេលដែលអ្នកត្រូវការផ្លាស់ប្តូរទិសដៅនៃកម្លាំងដោយមិនផ្លាស់ប្តូរទំហំរបស់វា។
ប្លុកដែលអាចចល័តបាន។
ប្លុកដែលអាចចល័តបានធ្វើសកម្មភាពស្រដៀងគ្នាទៅនឹងដងថ្លឹង ដែលដៃមាន៖ $l_2=(l_1)/(2)=r$។ ក្នុងករណីនេះ លក្ខខណ្ឌលំនឹងមានទម្រង់៖
ដែល $F_1$ គឺជាកម្លាំងអនុវត្ត $F_2$ គឺជាបន្ទុក។ ការប្រើប្រាស់ប្លុកដែលអាចចល័តបានផ្តល់នូវការកើនឡើងនៃកម្លាំងពីរដង។
Polyspast (ប្រព័ន្ធប្លុក)
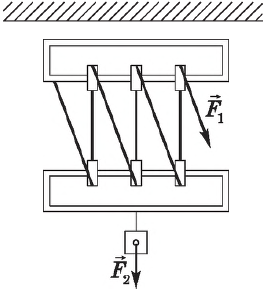
ឧបករណ៍លើកខ្សែសង្វាក់ធម្មតាមាន $n$ ចល័ត និង $n$ ប្លុកថេរ។ ការអនុវត្តវាផ្តល់នូវកម្លាំង 2n$ ដង៖
$F_1=(F_2)/(2n)$
ខ្សែសង្វាក់ថាមពលមាន n អាចចល័តបាន និងប្លុកថេរមួយ។ ការប្រើប្រាស់ឧបករណ៍ស្ទូចខ្សែសង្វាក់ថាមពលផ្តល់នូវកម្លាំង 2^n$ ដង៖
$F_1=(F_2)/(2^n)$

វីស
វីសគឺជាយន្តហោះទំនោរដែលរងរបួសនៅលើអ័ក្ស។

លក្ខខណ្ឌសម្រាប់តុល្យភាពនៃកម្លាំងដែលដើរតួនៅលើវីសមានទម្រង់:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

ដែលជាកន្លែងដែល $F_1$ គឺជាកម្លាំងខាងក្រៅដែលបានអនុវត្តទៅវីស និងធ្វើសកម្មភាពនៅចម្ងាយ $R$ ពីអ័ក្សរបស់វា; $F_2$ គឺជាកម្លាំងដែលដើរតួក្នុងទិសដៅនៃអ័ក្សវីស។ $h$ - វីសស្ពឺ; $r$ គឺជាកាំខ្សែស្រឡាយមធ្យម; $α$ គឺជាមុំនៃខ្សែស្រឡាយ។ $R$ គឺជាប្រវែងនៃដងថ្លឹង ( wrench) ដែលបង្វិលវីសដោយកម្លាំង $F_1$ ។
ប្រសិទ្ធភាព
មេគុណនៃការអនុវត្ត (COP) - សមាមាត្រនៃការងារមានប្រយោជន៍ចំពោះការងារទាំងអស់ដែលបានចំណាយ។
ប្រសិទ្ធភាពត្រូវបានបង្ហាញជាភាគរយជាញឹកញាប់ ហើយត្រូវបានបង្ហាញដោយអក្សរក្រិក $η$ ("នេះ"):
$η=(A_p)/(A_3) 100%$
ដែល $A_n$ ជាការងារមានប្រយោជន៍ $A_3$ គឺជាការងារទាំងអស់ដែលត្រូវចំណាយ។
ការងារដែលមានប្រយោជន៍គឺតែងតែជាផ្នែកមួយនៃការងារសរុបដែលមនុស្សម្នាក់ចំណាយដោយប្រើយន្តការនេះឬនោះ។
ផ្នែកមួយនៃការងារដែលបានធ្វើគឺត្រូវចំណាយលើការយកឈ្នះលើកម្លាំងនៃការកកិត។ ចាប់តាំងពី $А_3 > А_п$ ប្រសិទ្ធភាពគឺតែងតែតិចជាង $1$ (ឬ $< 100%$).
ដោយសារការងារនីមួយៗនៅក្នុងសមីការនេះអាចត្រូវបានបង្ហាញជាផលិតផលនៃកម្លាំងដែលត្រូវគ្នា និងចម្ងាយដែលបានធ្វើដំណើរ វាអាចត្រូវបានសរសេរឡើងវិញដូចខាងក្រោម៖ $F_1s_1≈F_2s_2$ ។
ពីនេះវាដូចខាងក្រោម, ការឈ្នះដោយមានជំនួយពីយន្តការជាធរមាន យើងចាញ់ចំនួនដងដូចគ្នានៅតាមផ្លូវ ហើយច្រាសមកវិញ. ច្បាប់នេះត្រូវបានគេហៅថាច្បាប់មាសនៃមេកានិច។
ច្បាប់មាសនៃមេកានិចគឺជាច្បាប់ប្រហាក់ប្រហែល ព្រោះវាមិនគិតពីការងារដើម្បីជំនះការកកិត និងទំនាញនៃផ្នែកនៃឧបករណ៍ដែលបានប្រើ។ ទោះជាយ៉ាងណាក៏ដោយ វាអាចមានប្រយោជន៍ខ្លាំងណាស់នៅពេលវិភាគប្រតិបត្តិការនៃយន្តការសាមញ្ញណាមួយ។

ដូច្នេះ ជាឧទាហរណ៍ ដោយសារច្បាប់នេះ យើងអាចនិយាយបានភ្លាមៗថា កម្មករដែលបង្ហាញក្នុងរូបនោះ ជាមួយនឹងការកើនឡើងទ្វេដងនៃកម្លាំងលើក 10$ សង់ទីម៉ែត្រ នឹងត្រូវបន្ថយចុងម្ខាងនៃដងថ្លឹង 20$ សង់ទីម៉ែត្រ។
ការប៉ះទង្គិចនៃសាកសព។ ផលប៉ះពាល់នៃការបត់បែននិង inelastic
ច្បាប់នៃការអភិរក្សនៃសន្ទុះ និងថាមពលមេកានិក ត្រូវបានប្រើដើម្បីដោះស្រាយបញ្ហានៃចលនារបស់សាកសពបន្ទាប់ពីការប៉ះទង្គិចគ្នា: momenta និងថាមពលដែលគេស្គាល់មុនពេលប៉ះទង្គិចត្រូវបានប្រើដើម្បីកំណត់តម្លៃនៃបរិមាណទាំងនេះបន្ទាប់ពីការប៉ះទង្គិច។ ពិចារណាករណីនៃផលប៉ះពាល់នៃការបត់បែន និង inelastic ។
ផលប៉ះពាល់ដែលមិនអាចបត់បែនបានយ៉ាងពិតប្រាកដត្រូវបានគេហៅថា បន្ទាប់ពីនោះសាកសពបង្កើតបានជារូបកាយតែមួយដែលផ្លាស់ទីក្នុងល្បឿនជាក់លាក់មួយ។ បញ្ហានៃល្បឿននៃក្រោយគឺត្រូវបានដោះស្រាយដោយប្រើច្បាប់នៃការអភិរក្សនៃសន្ទុះសម្រាប់ប្រព័ន្ធនៃសាកសពដែលមានម៉ាស់ $m_1$ និង $m_2$ (ប្រសិនបើយើងកំពុងនិយាយអំពីសាកសពពីរ) មុននិងក្រោយផលប៉ះពាល់:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
ជាក់ស្តែង ថាមពល kinetic នៃរូបកាយមិនត្រូវបានរក្សាកំឡុងពេលមានផលប៉ះពាល់មិនស្មើគ្នាទេ (ឧទាហរណ៍ នៅ $(υ_1)↖(→)=-(υ_2)↖(→)$ និង $m_1=m_2$ វាក្លាយជាស្មើសូន្យបន្ទាប់ពី ផលប៉ះពាល់) ។
ផលប៉ះពាល់នៃការបត់បែនយ៉ាងពិតប្រាកដត្រូវបានគេហៅថា ដែលក្នុងនោះមិនត្រឹមតែផលបូកនៃកម្លាំងរុញច្រានត្រូវបានរក្សាទុកប៉ុណ្ណោះទេ ប៉ុន្តែក៏ជាផលបូកនៃថាមពល kinetic នៃសាកសពដែលប៉ះទង្គិចគ្នាផងដែរ។
សម្រាប់ផលប៉ះពាល់នៃការបត់បែនយ៉ាងពិតប្រាកដ សមីការ
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2) )^2)/(2)$
ដែល $m_1, m_2$ គឺជាម៉ាស់របស់បាល់ $υ_1, υ_2$ គឺជាល្បឿននៃបាល់មុនពេលប៉ះ, $υ"_1, υ"_2$ គឺជាល្បឿននៃបាល់បន្ទាប់ពីការប៉ះ។
