Mga paksa ng USE codifier: momentum ng isang katawan, momentum ng isang sistema ng mga katawan, batas ng konserbasyon ng momentum.
Pulse Ang katawan ay isang dami ng vector na katumbas ng produkto ng masa ng katawan at ang bilis nito:
Walang mga espesyal na yunit para sa pagsukat ng momentum. Ang dimensyon ng momentum ay produkto lamang ng dimensyon ng masa at ng dimensyon ng bilis:
Bakit kawili-wili ang konsepto ng momentum? Ito ay lumalabas na maaari itong magamit upang bigyan ang pangalawang batas ni Newton ng bahagyang naiiba, lubhang kapaki-pakinabang din na anyo.
Pangalawang batas ni Newton sa impulsive form
Hayaang maging resulta ng mga puwersang inilapat sa katawan ng masa. Magsisimula tayo sa karaniwang notasyon ng pangalawang batas ni Newton:
Dahil ang acceleration ng katawan ay katumbas ng derivative ng velocity vector, ang pangalawang batas ni Newton ay muling isinulat tulad ng sumusunod:
Ipinakilala namin ang isang pare-pareho sa ilalim ng tanda ng derivative:
Tulad ng nakikita mo, ang derivative ng momentum ay nakuha sa kaliwang bahagi:
. ( 1 )
Ang kaugnayan ( 1 ) ay isang bagong anyo ng ikalawang batas ni Newton.
Pangalawang batas ni Newton sa impulsive form. Ang derivative ng momentum ng isang katawan ay ang resulta ng mga puwersa na inilapat sa katawan.
Masasabi rin natin ito: ang nagresultang puwersa na kumikilos sa katawan ay katumbas ng rate ng pagbabago ng momentum ng katawan.
Ang derivative sa formula ( 1 ) ay maaaring palitan ng ratio ng mga huling increment:
. ( 2 )
Sa kasong ito, mayroong isang average na puwersa na kumikilos sa katawan sa pagitan ng oras. Kung mas maliit ang value , mas malapit ang kaugnayan sa derivative , at mas malapit ang average na puwersa sa agarang halaga nito sa isang partikular na oras.
Sa mga gawain, bilang panuntunan, ang agwat ng oras ay medyo maliit. Halimbawa, maaari itong maging ang oras ng epekto ng bola sa dingding, at pagkatapos - ang average na puwersa na kumikilos sa bola mula sa gilid ng dingding sa panahon ng epekto.
Ang vector sa kaliwang bahagi ng kaugnayan ( 2 ) ay tinatawag pagbabago ng momentum sa panahon ng . Ang pagbabago ng momentum ay ang pagkakaiba sa pagitan ng pangwakas at paunang momentum vectors. Ibig sabihin, kung ang momentum ng katawan sa ilang unang sandali ng oras, ay ang momentum ng katawan pagkatapos ng isang yugto ng panahon , kung gayon ang pagbabago sa momentum ay ang pagkakaiba:
Muli naming binibigyang-diin na ang pagbabago sa momentum ay ang pagkakaiba ng mga vectors (Larawan 1):
Hayaang, halimbawa, ang bola ay lumipad patayo sa dingding (ang momentum bago ang impact ay ) at tumalbog pabalik nang hindi nawawala ang bilis (ang momentum pagkatapos ng impact ay ). Sa kabila ng katotohanan na ang modulo momentum ay hindi nagbago (), mayroong pagbabago sa momentum:
Sa geometriko, ang sitwasyong ito ay ipinapakita sa Fig. 2:
Ang modulus ng pagbabago sa momentum, tulad ng nakikita natin, ay katumbas ng dalawang beses ang modulus ng paunang momentum ng bola: .
Isulat muli natin ang formula ( 2 ) tulad ng sumusunod:
, ( 3 )
o, isulat ang pagbabago ng momentum tulad ng nasa itaas:
Ang halaga ay tinatawag puwersang salpok. Walang espesyal na yunit ng pagsukat para sa salpok ng puwersa; ang dimensyon ng puwersang salpok ay produkto lamang ng mga sukat ng puwersa at oras:
(Tandaan na lumalabas na isa pang posibleng yunit ng sukat para sa momentum ng katawan.)
Ang pandiwang pagbabalangkas ng pagkakapantay-pantay ( 3 ) ay ang mga sumusunod: ang pagbabago sa momentum ng katawan ay katumbas ng momentum ng puwersa na kumikilos sa katawan para sa isang takdang panahon. Ito, siyempre, ay muli ang pangalawang batas ni Newton sa pabigla-bigla na anyo.
Halimbawa ng Force Calculation
Bilang isang halimbawa ng paglalapat ng pangalawang batas ni Newton sa pabigla-bigla na anyo, isaalang-alang natin ang sumusunod na problema.
Gawain.
Ang isang bola ng mass r, na lumilipad nang pahalang na may bilis na m/s, ay tumama sa isang makinis na patayong pader at tumalbog ito nang hindi nawawala ang bilis. Ang anggulo ng saklaw ng bola (iyon ay, ang anggulo sa pagitan ng direksyon ng bola at patayo sa dingding) ay . Ang hit ay tumatagal ng s. Hanapin ang average na lakas
kumikilos sa bola sa panahon ng impact.
Desisyon. Una sa lahat, ipapakita namin na ang anggulo ng pagmuni-muni ay katumbas ng anggulo ng saklaw, iyon ay, ang bola ay tumalbog sa dingding sa parehong anggulo (Larawan 3).
Ayon sa (3) mayroon tayong: . Ito ay sumusunod na ang momentum pagbabago vector co-directed may vector , ibig sabihin, nakadirekta patayo sa dingding patungo sa rebound ng bola (Larawan 5).
 |
| kanin. 5. Sa gawain |
Mga vector at
pantay sa modulus
(dahil hindi nagbago ang bilis ng bola). Samakatuwid, ang tatsulok na binubuo ng mga vectors , at , ay isosceles. Nangangahulugan ito na ang anggulo sa pagitan ng mga vector at ay katumbas ng , iyon ay, ang anggulo ng pagmuni-muni ay talagang katumbas ng anggulo ng saklaw.
Ngayon tandaan bilang karagdagan na ang aming isosceles triangle ay may isang anggulo (ito ang anggulo ng saklaw); kaya ang tatsulok na ito ay equilateral. Mula rito:
At pagkatapos ay ang nais na average na puwersa na kumikilos sa bola:
Salpok ng sistema ng katawan
Magsimula tayo sa isang simpleng sitwasyon ng isang dalawang-katawan na sistema. Ibig sabihin, hayaan ang katawan 1 at katawan 2 na may momenta at ayon sa pagkakabanggit. Ang impulse ng body data system ay ang vector sum ng mga impulses ng bawat katawan:
Ito ay lumalabas na para sa momentum ng isang sistema ng mga katawan mayroong isang formula na katulad ng pangalawang batas ni Newton sa anyo (1). Kunin natin ang formula na ito.
Lahat ng iba pang mga bagay kung saan nakikipag-ugnayan ang mga katawan 1 at 2 sa ilalim ng pagsasaalang-alang, tatawagan namin panlabas na katawan. Ang mga puwersa kung saan kumikilos ang mga panlabas na katawan sa mga katawan 1 at 2 ay tinatawag panlabas na pwersa. Hayaan - ang nagreresultang panlabas na puwersa na kumikilos sa katawan 1. Katulad nito - ang nagresultang panlabas na puwersa na kumikilos sa katawan 2 (Larawan 6).
Bilang karagdagan, ang mga katawan 1 at 2 ay maaaring makipag-ugnayan sa isa't isa. Hayaang kumilos ang katawan 2 sa katawan 1 nang may puwersa. Pagkatapos ang katawan 1 ay kumikilos sa katawan 2 nang may puwersa. Ayon sa ikatlong batas ni Newton, ang mga puwersa at ay pantay sa ganap na halaga at magkasalungat sa direksyon: . Puwersa at ay lakas ng loob, gumagana sa system.
Isulat natin para sa bawat katawan 1 at 2 ang pangalawang batas ni Newton sa anyo ( 1 ):
, ( 4 )
. ( 5 )
Magdagdag tayo ng mga pagkakapantay-pantay ( 4 ) at ( 5 ):
Sa kaliwang bahagi ng nagresultang pagkakapantay-pantay ay ang kabuuan ng mga derivatives, na katumbas ng derivative ng kabuuan ng mga vectors at . Sa kanang bahagi mayroon tayo, sa bisa ng ikatlong batas ni Newton:
Ngunit - ito ang salpok ng sistema ng mga katawan 1 at 2. Tinutukoy din natin - ito ang resulta ng mga panlabas na puwersa na kumikilos sa sistema. Nakukuha namin ang:
. ( 6 )
kaya, ang rate ng pagbabago ng momentum ng isang sistema ng mga katawan ay ang resulta ng mga panlabas na puwersa na inilapat sa sistema. Pagkakapantay-pantay ( 6 ), na gumaganap ng papel ng pangalawang batas ni Newton para sa sistema ng mga katawan, ang gusto nating makuha.
Ang Formula (6) ay hinango para sa kaso ng dalawang katawan. I-generalize natin ngayon ang ating pangangatwiran sa kaso ng isang di-makatwirang bilang ng mga katawan sa system.
Ang salpok ng sistema ng mga katawan Ang mga katawan ay tinatawag na vector sum ng mga impulses ng lahat ng katawan na kasama sa system. Kung ang sistema ay binubuo ng mga katawan, kung gayon ang momentum ng sistemang ito ay katumbas ng:
Pagkatapos ang lahat ay ginagawa sa eksaktong parehong paraan tulad ng nasa itaas (tanging teknikal na ito ay mukhang medyo mas kumplikado). Kung para sa bawat katawan ay nagsusulat tayo ng mga pagkakapantay-pantay na katulad ng ( 4 ) at ( 5 ), at pagkatapos ay idagdag ang lahat ng mga pagkakapantay-pantay na ito, pagkatapos ay sa kaliwang bahagi ay muli nating nakuha ang derivative ng momentum ng system, at sa kanang bahagi lamang ang kabuuan ng mga panlabas na puwersa. nananatili (mga panloob na puwersa, na nagdaragdag sa mga pares, ay magbibigay ng zero dahil sa ikatlong batas ni Newton). Samakatuwid, ang pagkakapantay-pantay (6) ay mananatiling wasto sa pangkalahatang kaso.
Batas ng konserbasyon ng momentum
Ang sistema ng katawan ay tinatawag sarado kung ang mga aksyon ng mga panlabas na katawan sa mga katawan ng isang partikular na sistema ay alinman sa bale-wala o kabayaran sa isa't isa. Kaya, sa kaso ng isang saradong sistema ng mga katawan, tanging ang pakikipag-ugnayan ng mga katawan na ito sa isa't isa ay mahalaga, ngunit hindi sa anumang iba pang mga katawan.
Ang resulta ng mga panlabas na puwersa na inilapat sa isang saradong sistema ay katumbas ng zero: . Sa kasong ito, mula sa ( 6 ) nakukuha natin ang:
Ngunit kung ang derivative ng vector ay nawala (ang rate ng pagbabago ng vector ay zero), kung gayon ang vector mismo ay hindi nagbabago sa oras:
Batas ng konserbasyon ng momentum. Ang momentum ng isang saradong sistema ng mga katawan ay nananatiling pare-pareho sa paglipas ng panahon para sa anumang pakikipag-ugnayan ng mga katawan sa loob ng sistemang ito.
Ang pinakasimpleng mga problema sa batas ng konserbasyon ng momentum ay nalutas ayon sa karaniwang pamamaraan, na ipapakita natin ngayon.
Gawain. Ang katawan ng mass r ay gumagalaw sa bilis na m/s sa isang makinis na pahalang na ibabaw. Ang isang katawan ng mass r ay gumagalaw patungo dito na may bilis na m/s. Ang isang ganap na hindi nababanat na epekto ay nangyayari (ang mga katawan ay magkadikit). Hanapin ang bilis ng mga katawan pagkatapos ng epekto.
Desisyon. Ang sitwasyon ay ipinapakita sa Fig. 7. Idirekta natin ang axis sa direksyon ng paggalaw ng unang katawan.
 |
| kanin. 7. Sa gawain |
Dahil makinis ang ibabaw, walang friction. Dahil ang ibabaw ay pahalang, at ang paggalaw ay nangyayari kasama nito, ang puwersa ng grabidad at ang reaksyon ng suporta ay nagbabalanse sa bawat isa:
Kaya, ang kabuuan ng vector ng mga puwersa na inilapat sa sistema ng mga katawan na ito ay katumbas ng zero. Nangangahulugan ito na ang sistema ng mga katawan ay sarado. Samakatuwid, natutugunan nito ang batas ng konserbasyon ng momentum:
. ( 7 )
Ang impulse ng system bago ang epekto ay ang kabuuan ng mga impulses ng mga katawan:
Matapos ang isang hindi nababanat na epekto, isang katawan ng masa ang nakuha, na gumagalaw sa nais na bilis:
Mula sa batas sa konserbasyon ng momentum ( 7 ) mayroon tayong:
Mula dito makikita natin ang bilis ng katawan na nabuo pagkatapos ng epekto:
Lumipat tayo sa mga projection sa axis:
Sa pamamagitan ng kundisyon, mayroon tayong: m/s, m/s, nang sa gayon
Ang minus sign ay nagpapahiwatig na ang mga malagkit na katawan ay gumagalaw sa direksyon na kabaligtaran sa axis. Target na bilis: m/s.
Batas sa konserbasyon ng momentum projection
Ang sumusunod na sitwasyon ay madalas na nangyayari sa mga gawain. Ang sistema ng mga katawan ay hindi sarado (ang vector sum ng mga panlabas na puwersa na kumikilos sa system ay hindi katumbas ng zero), ngunit mayroong isang axis, ang kabuuan ng mga projection ng mga panlabas na pwersa sa axis ay zero sa anumang punto ng oras. Pagkatapos ay maaari nating sabihin na sa kahabaan ng axis na ito, ang ating sistema ng mga katawan ay kumikilos bilang isang sarado, at ang projection ng momentum ng system papunta sa axis ay napanatili.
Ipakita natin ito nang mas mahigpit. Pagkakapantay-pantay ng proyekto ( 6 ) papunta sa axis :
Kung ang projection ng mga nagreresultang panlabas na pwersa ay naglalaho, kung gayon
Samakatuwid, ang projection ay pare-pareho:
Batas ng konserbasyon ng momentum projection. Kung ang projection sa axis ng kabuuan ng mga panlabas na pwersa na kumikilos sa system ay katumbas ng zero, kung gayon ang projection ng momentum ng system ay hindi nagbabago sa paglipas ng panahon.
Tingnan natin ang isang halimbawa ng isang partikular na problema, kung paano gumagana ang batas ng konserbasyon ng momentum projection.
Gawain. Isang mass boy, na nag-i-skate sa makinis na yelo, ang naghagis ng mass stone nang may bilis sa isang anggulo sa abot-tanaw. Hanapin ang bilis kung saan ang bata ay gumulong pabalik pagkatapos ng paghagis.
Desisyon. Ang sitwasyon ay schematically na ipinapakita sa Fig. walo . Ang batang lalaki ay inilalarawan bilang isang parihaba.
 |
| kanin. 8. Sa gawain |
Ang momentum ng "boy + stone" na sistema ay hindi pinananatili. Ito ay makikita kahit na mula sa katotohanan na pagkatapos ng paghagis, isang vertical na bahagi ng momentum ng system ang lilitaw (ibig sabihin, ang vertical na bahagi ng momentum ng bato), na wala roon bago ang paghagis.
Samakatuwid, ang sistema na ang batang lalaki at ang bato ay nabuo ay hindi sarado. Bakit? Ang katotohanan ay ang kabuuan ng vector ng mga panlabas na puwersa ay hindi katumbas ng zero sa panahon ng paghagis. Ang halaga ay mas malaki kaysa sa kabuuan, at dahil sa labis na ito, mismong ang patayong bahagi ng momentum ng system ang lalabas.
Gayunpaman, ang mga panlabas na puwersa ay kumikilos lamang patayo (walang alitan). Samakatuwid, ang projection ng momentum sa pahalang na axis ay napanatili. Bago ang paghagis, ang projection na ito ay katumbas ng zero. Ang pagdidirekta sa axis sa direksyon ng paghagis (upang ang batang lalaki ay pumunta sa direksyon ng negatibong semi-axis), nakuha namin.
momentum ng katawan
Ang momentum ng isang katawan ay isang dami na katumbas ng produkto ng masa ng katawan at ang bilis nito.
Dapat alalahanin na pinag-uusapan natin ang isang katawan na maaaring katawanin bilang isang materyal na punto. Ang momentum ng isang katawan ($p$) ay tinatawag ding momentum. Ang konsepto ng momentum ay ipinakilala sa pisika ni René Descartes (1596-1650). Ang terminong "impulse" ay lumitaw sa ibang pagkakataon (impulsus sa Latin ay nangangahulugang "push"). Ang momentum ay isang vector quantity (tulad ng velocity) at ipinahayag ng formula:
$p↖(→)=mυ↖(→)$
Ang direksyon ng momentum vector ay palaging tumutugma sa direksyon ng bilis.
Ang unit ng momentum sa SI ay ang momentum ng isang katawan na may mass na $1$ kg na gumagalaw sa bilis na $1$ m/s, samakatuwid, ang unit ng momentum ay $1$ kg $·$ m/s.
Kung ang isang pare-parehong puwersa ay kumikilos sa isang katawan (materyal na punto) sa pagitan ng oras na $∆t$, kung gayon ang acceleration ay magiging pare-pareho din:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
kung saan, ang $(υ_1)↖(→)$ at $(υ_2)↖(→)$ ay ang inisyal at huling bilis ng katawan. Ang pagpapalit ng halagang ito sa pagpapahayag ng pangalawang batas ni Newton, nakukuha natin:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Pagbukas ng mga bracket at paggamit ng expression para sa momentum ng katawan, mayroon tayong:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Dito $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ ang pagbabago ng momentum sa paglipas ng panahon $∆t$. Pagkatapos ang nakaraang equation ay magiging:
$∆p↖(→)=F↖(→)∆t$
Ang expression na $∆p↖(→)=F↖(→)∆t$ ay isang matematikal na representasyon ng pangalawang batas ni Newton.
Ang produkto ng isang puwersa at ang tagal nito ay tinatawag momentum ng puwersa. Kaya ang pagbabago sa momentum ng isang punto ay katumbas ng pagbabago sa momentum ng puwersang kumikilos dito.
Ang expression na $∆p↖(→)=F↖(→)∆t$ ay tinatawag equation ng paggalaw ng katawan. Dapat pansinin na ang parehong aksyon - isang pagbabago sa momentum ng isang punto - ay maaaring makuha sa pamamagitan ng isang maliit na puwersa sa mahabang panahon at sa pamamagitan ng isang malaking puwersa sa isang maliit na yugto ng panahon.
Impulse ng system tel. Batas ng pagbabago ng momentum
Ang impulse (momentum) ng isang mekanikal na sistema ay isang vector na katumbas ng kabuuan ng mga impulses ng lahat ng mga materyal na punto ng sistemang ito:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Ang mga batas ng pagbabago at konserbasyon ng momentum ay bunga ng pangalawa at pangatlong batas ni Newton.
Isaalang-alang ang isang sistema na binubuo ng dalawang katawan. Ang mga puwersa ($F_(12)$ at $F_(21)$ sa figure, kung saan ang mga katawan ng system ay nakikipag-ugnayan sa isa't isa, ay tinatawag na panloob.
Hayaang, bilang karagdagan sa mga panloob na puwersa, ang mga panlabas na puwersa na $(F_1)↖(→)$ at $(F_2)↖(→)$ ay kumilos sa sistema. Para sa bawat katawan, maaaring isulat ang equation na $∆p↖(→)=F↖(→)∆t$. Pagdaragdag ng kaliwa at kanang bahagi ng mga equation na ito, nakukuha natin ang:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Ayon sa ikatlong batas ni Newton $(F_(12))↖(→)=-(F_(21))↖(→)$.
Kaya naman,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
Sa kaliwang bahagi ay ang geometric na kabuuan ng mga pagbabago sa momentum ng lahat ng katawan ng system, katumbas ng pagbabago sa momentum ng system mismo - $(∆p_(syst))↖(→)$. sa isip, ang pagkakapantay-pantay na $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ ay maaaring isulat:
$(∆p_(sys))↖(→)=F↖(→)∆t$
kung saan ang $F↖(→)$ ay ang kabuuan ng lahat ng panlabas na puwersa na kumikilos sa katawan. Ang resulta na nakuha ay nangangahulugan na ang mga panlabas na pwersa lamang ang maaaring magbago ng momentum ng system, at ang pagbabago sa momentum ng system ay nakadirekta sa parehong paraan tulad ng kabuuang panlabas na puwersa. Ito ang kakanyahan ng batas ng pagbabago sa momentum ng isang mekanikal na sistema.
Hindi maaaring baguhin ng mga panloob na puwersa ang kabuuang momentum ng system. Binabago lamang nila ang mga impulses ng mga indibidwal na katawan ng system.
Batas ng konserbasyon ng momentum
Mula sa equation na $(∆p_(syst))↖(→)=F↖(→)∆t$ sumusunod ang batas sa konserbasyon ng momentum. Kung walang puwersang panlabas na kumikilos sa system, ang kanang bahagi ng equation na $(∆p_(sys))↖(→)=F↖(→)∆t$ ay mawawala, na nangangahulugan na ang kabuuang momentum ng system ay nananatiling hindi nagbabago. :
$(∆p_(sys))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Ang isang sistema kung saan walang mga panlabas na pwersa ang kumikilos o ang resulta ng mga panlabas na pwersa ay katumbas ng zero ay tinatawag sarado.
Ang batas ng konserbasyon ng momentum ay nagsasaad:
Ang kabuuang momentum ng isang saradong sistema ng mga katawan ay nananatiling pare-pareho para sa anumang pakikipag-ugnayan ng mga katawan ng system sa bawat isa.
Ang resulta na nakuha ay wasto para sa isang sistema na naglalaman ng isang arbitrary na bilang ng mga katawan. Kung ang kabuuan ng mga panlabas na puwersa ay hindi katumbas ng zero, ngunit ang kabuuan ng kanilang mga projection sa ilang direksyon ay katumbas ng zero, kung gayon ang projection ng momentum ng system sa direksyon na ito ay hindi nagbabago. Kaya, halimbawa, ang isang sistema ng mga katawan sa ibabaw ng Earth ay hindi maituturing na sarado dahil sa puwersa ng gravity na kumikilos sa lahat ng mga katawan, gayunpaman, ang kabuuan ng mga projection ng mga impulses sa pahalang na direksyon ay maaaring manatiling hindi nagbabago (sa kawalan. ng friction), dahil sa direksyong ito ang puwersa ng grabidad ay hindi wasto.
Pagpapaandar ng jet
Isaalang-alang ang mga halimbawa na nagpapatunay sa bisa ng batas ng konserbasyon ng momentum.
Kumuha tayo ng rubber balloon ng mga bata, palpasin at bitawan. Makikita natin na kapag ang hangin ay nagsimulang lumabas dito sa isang direksyon, ang lobo mismo ay lilipad sa kabilang direksyon. Ang paggalaw ng bola ay isang halimbawa ng jet propulsion. Ito ay ipinaliwanag ng batas ng konserbasyon ng momentum: ang kabuuang momentum ng sistema na "bola kasama ang hangin sa loob nito" bago ang pag-agos ng hangin ay zero; dapat itong manatiling katumbas ng zero sa panahon ng paggalaw; samakatuwid, ang bola ay gumagalaw sa direksyon na kabaligtaran sa direksyon ng pag-agos ng jet, at sa ganoong bilis na ang momentum nito ay katumbas ng ganap na halaga sa momentum ng air jet.
pagpapaandar ng jet tinatawag na paggalaw ng isang katawan na nangyayari kapag ang isang bahagi nito ay humiwalay dito sa ilang bilis. Dahil sa batas ng konserbasyon ng momentum, ang direksyon ng paggalaw ng katawan ay kabaligtaran sa direksyon ng paggalaw ng hiwalay na bahagi.
Ang mga rocket flight ay batay sa prinsipyo ng jet propulsion. Ang modernong space rocket ay isang napakakomplikadong sasakyang panghimpapawid. Ang masa ng rocket ay ang kabuuan ng masa ng gumaganang likido (i.e., mga mainit na gas na nagreresulta mula sa pagkasunog ng gasolina at inilabas sa anyo ng isang jet stream) at ang pangwakas, o, tulad ng sinasabi nila, "tuyo" na masa ng rocket, na natitira pagkatapos ng pagbuga ng gumaganang likido mula sa rocket.
Kapag ang isang reaktibong gas jet ay inilabas mula sa isang rocket sa mataas na bilis, ang rocket mismo ay nagmamadali sa kabilang direksyon. Ayon sa batas sa konserbasyon ng momentum, ang momentum na $m_(p)υ_p$ na nakuha ng rocket ay dapat na katumbas ng momentum na $m_(gas) υ_(gas)$ ng mga ejected gas:
$m_(p)υ_p=m_(gas) υ_(gas)$
Ito ay sumusunod na ang bilis ng rocket
$υ_p=((m_(gas))/(m_p)) υ_(gas)$
Makikita mula sa formula na ito na mas malaki ang bilis ng rocket, mas malaki ang bilis ng mga ejected gas at ang ratio ng mass ng working fluid (i.e., ang mass ng gasolina) hanggang sa huling ("tuyo") masa ng rocket.
Ang formula na $υ_p=((m_(gas))/(m_p))·υ_(gas)$ ay tinatayang. Hindi isinasaalang-alang na habang nasusunog ang gasolina, ang masa ng lumilipad na rocket ay nagiging mas maliit at mas maliit. Ang eksaktong pormula para sa bilis ng isang rocket ay nakuha noong 1897 ni K. E. Tsiolkovsky at dinala ang kanyang pangalan.
Pilitin ang trabaho
Ang terminong "trabaho" ay ipinakilala sa pisika noong 1826 ng Pranses na siyentipiko na si J. Poncelet. Kung sa pang-araw-araw na buhay ang paggawa lamang ng tao ay tinatawag na trabaho, kung gayon sa pisika at, lalo na, sa mekanika, karaniwang tinatanggap na ang trabaho ay ginagawa sa pamamagitan ng puwersa. Ang pisikal na dami ng trabaho ay karaniwang tinutukoy ng titik $A$.
Pilitin ang trabaho- ito ay isang sukatan ng pagkilos ng isang puwersa, depende sa module at direksyon nito, pati na rin sa pag-aalis ng punto ng paggamit ng puwersa. Para sa patuloy na puwersa at paggalaw ng rectilinear, ang gawain ay tinutukoy ng pagkakapantay-pantay:
$A=F|∆r↖(→)|cosα$
kung saan ang $F$ ay ang puwersang kumikilos sa katawan, ang $∆r↖(→)$ ay ang displacement, ang $α$ ay ang anggulo sa pagitan ng puwersa at ang displacement.

Ang gawain ng puwersa ay katumbas ng produkto ng mga module ng puwersa at displacement at ang cosine ng anggulo sa pagitan nila, ibig sabihin, ang scalar product ng mga vectors $F↖(→)$ at $∆r↖(→)$.
Ang trabaho ay isang scalar na dami. Kung $α 0$, at kung $90°
Kapag maraming pwersa ang kumilos sa isang katawan, ang kabuuang gawain (ang kabuuan ng gawain ng lahat ng pwersa) ay katumbas ng gawain ng nagresultang puwersa.
Ang SI unit ng trabaho ay joule($1$ J). Ang $1$ J ay ang gawaing ginawa ng puwersa na $1$ N sa isang landas na $1$ m sa direksyon ng puwersang ito. Ang yunit na ito ay pinangalanan sa English scientist na si J. Joule (1818-1889): $1$ J = $1$ N $·$ m. Madalas ding ginagamit ang kilojoules at millijoules: $1$ kJ $= 1,000$ J, $1$ mJ $ = 0.001$ J.
Ang gawain ng grabidad
Isaalang-alang natin ang isang katawan na dumudulas kasama ang isang inclined plane na may inclination angle na $α$ at isang taas na $H$.

Ipinapahayag namin ang $∆x$ sa mga tuntunin ng $H$ at $α$:
$∆x=(H)/(sinα)$
Isinasaalang-alang na ang gravity $F_т=mg$ ay gumagawa ng isang anggulo ($90° - α$) sa direksyon ng paggalaw, gamit ang formula na $∆x=(H)/(sin)α$, nakakakuha tayo ng expression para sa work of gravity $A_g$:
$A_g=mg cos(90°-α)(H)/(sinα)=mgH$
Mula sa formula na ito makikita na ang gawain ng grabidad ay nakasalalay sa taas at hindi nakasalalay sa anggulo ng pagkahilig ng eroplano.
Mula dito ay sumusunod na:
- ang gawain ng grabidad ay hindi nakasalalay sa hugis ng tilapon kung saan gumagalaw ang katawan, ngunit lamang sa paunang at panghuling posisyon ng katawan;
- kapag ang isang katawan ay gumagalaw sa isang saradong tilapon, ang gawain ng gravity ay zero, ibig sabihin, ang gravity ay isang konserbatibong puwersa (ang konserbatibong pwersa ay mga puwersa na may ganitong katangian).
Ang gawain ng mga puwersa ng reaksyon, ay zero dahil ang puwersa ng reaksyon ($N$) ay nakadirekta patayo sa displacement $∆x$.
Ang gawain ng puwersa ng friction
Ang friction force ay nakadirekta sa tapat ng displacement $∆x$ at gumagawa ng isang anggulo na $180°$ dito, kaya ang gawain ng friction force ay negatibo:
$A_(tr)=F_(tr)∆x cos180°=-F_(tr) ∆x$
Dahil $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ noon
$A_(tr)=μmgHctgα$
Ang gawain ng nababanat na puwersa
Hayaang kumilos ang panlabas na puwersa na $F↖(→)$ sa isang hindi nakaunat na spring na may haba na $l_0$, na umaabot dito ng $∆l_0=x_0$. Sa posisyon $x=x_0F_(control)=kx_0$. Pagkatapos ng pagwawakas ng puwersa na $F↖(→)$ sa puntong $x_0$, ang spring ay na-compress sa ilalim ng pagkilos ng puwersa na $F_(control)$.

Alamin natin ang gawain ng elastic force kapag ang coordinate ng kanang dulo ng spring ay nagbago mula sa $х_0$ hanggang $х$. Dahil ang nababanat na puwersa sa lugar na ito ay nagbabago nang linearly, sa batas ni Hooke, ang average na halaga nito sa lugar na ito ay maaaring gamitin:
$F_(ex.av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Pagkatapos ay ang gawain (isinasaalang-alang ang katotohanan na ang mga direksyon na $(F_(exp.av.))↖(→)$ at $(∆x)↖(→)$ ay pantay-pantay sa:
$A_(exerc)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Maaaring ipakita na ang anyo ng huling formula ay hindi nakadepende sa anggulo sa pagitan ng $(F_(exp.av.))↖(→)$ at $(∆x)↖(→)$. Ang gawain ng mga nababanat na puwersa ay nakasalalay lamang sa mga pagpapapangit ng tagsibol sa paunang at panghuling estado.
Kaya, ang nababanat na puwersa, tulad ng gravity, ay isang konserbatibong puwersa.
Kapangyarihan ng puwersa
Ang kapangyarihan ay isang pisikal na dami na sinusukat ng ratio ng trabaho sa tagal ng panahon kung kailan ito ginawa.
Sa madaling salita, ipinapakita ng kapangyarihan kung gaano karaming trabaho ang ginagawa bawat yunit ng oras (sa SI, para sa $1$ s).
Ang kapangyarihan ay tinutukoy ng formula:
kung saan ang $N$ ay ang kapangyarihan, ang $A$ ay ang gawaing ginawa sa oras na $∆t$.
Ang pagpapalit ng $A=F|(∆r)↖(→)|cosα$ sa formula na $N=(A)/(∆t)$ sa halip na ang gawaing $A$, makukuha natin ang:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Ang kapangyarihan ay katumbas ng produkto ng mga module ng puwersa at bilis ng mga vectors at ang cosine ng anggulo sa pagitan ng mga vectors na ito.
Ang kapangyarihan sa sistema ng SI ay sinusukat sa watts (W). Ang isang watt ($1$ W) ay ang kapangyarihan kung saan ang $1$ J ng trabaho ay ginagawa sa $1$ s: $1$ W $= 1$ J/s.
Ang yunit na ito ay pinangalanan sa Ingles na imbentor na si J. Watt (Watt), na nagtayo ng unang steam engine. Si J. Watt mismo (1736-1819) ay gumamit ng ibang yunit ng kapangyarihan - horsepower (hp), na ipinakilala niya upang maihambing ang pagganap ng isang steam engine at isang kabayo: $ 1 $ hp. $= 735.5$ Mar.
Sa teknolohiya, kadalasang ginagamit ang malalaking yunit ng kuryente - kilowatts at megawatts: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
Kinetic energy. Batas ng pagbabago ng kinetic energy
Kung ang isang katawan o ilang nakikipag-ugnayang katawan (isang sistema ng mga katawan) ay maaaring gumawa ng trabaho, pagkatapos ay sinasabi nila na sila ay may enerhiya.
Ang salitang "enerhiya" (mula sa Griyego. energia - aksyon, aktibidad) ay kadalasang ginagamit sa pang-araw-araw na buhay. Kaya, halimbawa, ang mga taong mabilis na makakagawa ng trabaho ay tinatawag na energetic, na may mahusay na enerhiya.
Ang enerhiyang taglay ng isang katawan dahil sa paggalaw ay tinatawag na kinetic energy.
Tulad ng sa kaso ng kahulugan ng enerhiya sa pangkalahatan, maaari nating sabihin tungkol sa kinetic energy na ang kinetic energy ay ang kakayahan ng isang gumagalaw na katawan na gumawa ng trabaho.
Hanapin natin ang kinetic energy ng isang katawan na may mass na $m$ na gumagalaw na may bilis na $υ$. Dahil ang kinetic energy ay ang enerhiya dahil sa paggalaw, ang zero state para dito ay ang estado kung saan ang katawan ay nagpapahinga. Ang pagkakaroon ng natagpuan ang trabaho na kinakailangan upang makipag-usap sa isang naibigay na bilis sa katawan, makikita natin ang kinetic energy nito.
Upang gawin ito, kinakalkula namin ang gawaing ginawa sa seksyon ng displacement $∆r↖(→)$ kapag ang mga direksyon ng force vectors $F↖(→)$ at displacement $∆r↖(→)$ ay nagtutugma. Sa kasong ito, ang trabaho ay
kung saan ang $∆x=∆r$

Para sa paggalaw ng isang punto na may acceleration $α=const$, ang expression para sa paggalaw ay may anyo:
$∆x=υ_1t+(sa^2)/(2),$
kung saan ang $υ_1$ ay ang paunang bilis.
Ang pagpapalit ng expression para sa $∆x$ mula sa $∆x=υ_1t+(at^2)/(2)$ sa equation na $A=F ∆x$ at gamit ang pangalawang batas ni Newton na $F=ma$, nakukuha natin ang:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Ang pagpapahayag ng acceleration sa mga tuntunin ng paunang $υ_1$ at panghuling $υ_2$ ay nagpapabilis ng $a=(υ_2-υ_1)/(t)$ at pinapalitan sa $A=ma(υ_1t+(at^2)/(2))=( banig)/ (2)(2υ_1+at)$ mayroon kaming:
$A=(m(υ_2-υ_1))/(2) (2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Ngayon equating ang paunang bilis sa zero: $υ_1=0$, kumuha kami ng isang expression para sa kinetic energy:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Kaya, ang isang gumagalaw na katawan ay may kinetic energy. Ang enerhiya na ito ay katumbas ng gawaing dapat gawin upang mapataas ang bilis ng katawan mula zero hanggang $υ$.
Mula sa $E_K=(mυ)/(2)=(p^2)/(2m)$ sumusunod na ang gawain ng isang puwersa upang ilipat ang isang katawan mula sa isang posisyon patungo sa isa pa ay katumbas ng pagbabago sa kinetic energy:
$A=E_(K_2)-E_(K_1)=∆E_K$
Ang pagkakapantay-pantay na $A=E_(K_2)-E_(K_1)=∆E_K$ ay nagpapahayag theorem sa pagbabago sa kinetic energy.
Pagbabago sa kinetic energy ng katawan(materyal point) para sa isang tiyak na tagal ng panahon ay katumbas ng gawaing ginawa sa panahong ito ng puwersang kumikilos sa katawan.
Potensyal na enerhiya
Ang potensyal na enerhiya ay ang enerhiya na tinutukoy ng magkaparehong pag-aayos ng mga nakikipag-ugnayan na mga katawan o mga bahagi ng parehong katawan.
Dahil ang enerhiya ay tinukoy bilang ang kakayahan ng isang katawan na gumawa ng trabaho, ang potensyal na enerhiya ay natural na tinukoy bilang ang gawain ng isang puwersa na nakasalalay lamang sa relatibong posisyon ng mga katawan. Ito ang gawain ng gravity $A=mgh_1-mgh_2=mgH$ at ang gawain ng elasticity:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Ang potensyal na enerhiya ng katawan ang pakikipag-ugnayan sa Earth ay tinatawag na halaga na katumbas ng produkto ng mass $m$ ng katawan na ito at ang free fall acceleration $g$ at ang taas $h$ ng katawan sa itaas ng ibabaw ng Earth:
Ang potensyal na enerhiya ng isang elastically deformed body ay ang halaga na katumbas ng kalahati ng produkto ng coefficient of elasticity (stiffness) $k$ ng katawan at ang square of deformation $∆l$:
$E_p=(1)/(2)k∆l^2$
Ang gawain ng mga konserbatibong pwersa (gravity at elasticity), na isinasaalang-alang ang $E_p=mgh$ at $E_p=(1)/(2)k∆l^2$, ay ipinahayag tulad ng sumusunod:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Ang formula na ito ay nagpapahintulot sa amin na magbigay ng pangkalahatang kahulugan ng potensyal na enerhiya.
Ang potensyal na enerhiya ng isang sistema ay isang halaga na nakasalalay sa posisyon ng mga katawan, ang pagbabago kung saan sa panahon ng paglipat ng sistema mula sa paunang estado hanggang sa pangwakas na estado ay katumbas ng gawain ng mga panloob na konserbatibong pwersa ng system, kinuha gamit ang kabaligtaran na tanda.
Ang minus sign sa kanang bahagi ng equation na $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ ay nangangahulugan na kapag ang trabaho ay ginawa ng panloob na pwersa ( halimbawa, ang pagbagsak ng katawan sa lupa sa ilalim ng pagkilos ng grabidad sa sistemang "bato-Earth"), bumababa ang enerhiya ng sistema. Ang trabaho at pagbabago sa potensyal na enerhiya sa isang sistema ay palaging may magkasalungat na mga palatandaan.
Dahil tinutukoy lamang ng trabaho ang pagbabago sa potensyal na enerhiya, tanging ang pagbabago sa enerhiya ang may pisikal na kahulugan sa mekanika. Samakatuwid, ang pagpili ng antas ng zero na enerhiya ay arbitrary at natutukoy lamang sa pamamagitan ng mga pagsasaalang-alang sa kaginhawahan, halimbawa, ang kadalian ng pagsulat ng kaukulang mga equation.
Ang batas ng pagbabago at pag-iingat ng mekanikal na enerhiya
Kabuuang mekanikal na enerhiya ng system ang kabuuan ng kinetic at potensyal na enerhiya nito ay tinatawag na:
Ito ay tinutukoy ng posisyon ng mga katawan (potensyal na enerhiya) at ang kanilang bilis (kinetic energy).
Ayon sa kinetic energy theorem,
$E_k-E_(k_1)=A_p+A_(pr),$
kung saan ang $А_р$ ay ang gawain ng mga potensyal na pwersa, ang $А_(pr)$ ay ang gawain ng mga hindi potensyal na pwersa.
Sa turn, ang gawain ng mga potensyal na pwersa ay katumbas ng pagkakaiba sa potensyal na enerhiya ng katawan sa paunang $E_(p_1)$ at huling $E_p$ na estado. Sa pag-iisip na ito, nakakakuha tayo ng ekspresyon para sa ang batas ng pagbabago ng mekanikal na enerhiya:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
kung saan ang kaliwang bahagi ng pagkakapantay-pantay ay ang pagbabago sa kabuuang mekanikal na enerhiya, at ang kanang bahagi ay ang gawain ng mga hindi potensyal na pwersa.
Kaya, batas ng pagbabago ng mekanikal na enerhiya nagbabasa:
Ang pagbabago sa mekanikal na enerhiya ng sistema ay katumbas ng gawain ng lahat ng hindi potensyal na pwersa.
Ang isang mekanikal na sistema kung saan ang mga potensyal na puwersa lamang ang kumikilos ay tinatawag na konserbatibo.
Sa isang konserbatibong sistema $A_(pr) = 0$. ito ay nagpapahiwatig batas ng konserbasyon ng mekanikal na enerhiya:
Sa isang saradong konserbatibong sistema, ang kabuuang mekanikal na enerhiya ay natipid (hindi nagbabago sa paglipas ng panahon):
$E_k+E_p=E_(k_1)+E_(p_1)$
Ang batas ng konserbasyon ng mekanikal na enerhiya ay nagmula sa mga batas ng Newtonian mechanics, na naaangkop sa isang sistema ng mga materyal na punto (o macroparticle).
Gayunpaman, ang batas ng konserbasyon ng mekanikal na enerhiya ay may bisa din para sa isang sistema ng microparticle, kung saan ang mga batas ni Newton mismo ay hindi na nalalapat.
Ang batas ng konserbasyon ng mekanikal na enerhiya ay bunga ng homogeneity ng oras.
Pagkakatulad ng oras ay iyon, sa ilalim ng parehong mga paunang kondisyon, ang kurso ng mga pisikal na proseso ay hindi nakasalalay sa sandali kung kailan nilikha ang mga kundisyong ito.
Ang batas ng konserbasyon ng kabuuang mekanikal na enerhiya ay nangangahulugan na kapag ang kinetic energy sa isang konserbatibong sistema ay nagbabago, ang potensyal na enerhiya nito ay dapat ding magbago, upang ang kanilang kabuuan ay mananatiling pare-pareho. Nangangahulugan ito ng posibilidad ng pag-convert ng isang uri ng enerhiya sa isa pa.
Alinsunod sa iba't ibang anyo ng paggalaw ng bagay, ang iba't ibang uri ng enerhiya ay isinasaalang-alang: mekanikal, panloob (katumbas ng kabuuan ng kinetic energy ng magulong paggalaw ng mga molekula na may kaugnayan sa sentro ng masa ng katawan at ang potensyal na enerhiya ng interaksyon ng mga molekula sa isa't isa), electromagnetic, kemikal (na binubuo ng kinetic energy ng paggalaw ng mga electron at electric ang enerhiya ng kanilang interaksyon sa isa't isa at sa atomic nuclei), nuclear energy, atbp. Ito ay makikita mula sa nabanggit na ang paghahati ng enerhiya sa iba't ibang uri ay sa halip arbitrary.
Ang mga likas na phenomena ay kadalasang sinasamahan ng pagbabago ng isang uri ng enerhiya sa isa pa. Kaya, halimbawa, ang alitan ng mga bahagi ng iba't ibang mga mekanismo ay humahantong sa conversion ng mekanikal na enerhiya sa init, ibig sabihin, sa panloob na enerhiya. Sa mga makina ng init, sa kabaligtaran, ang panloob na enerhiya ay na-convert sa mekanikal na enerhiya; sa galvanic cells, ang kemikal na enerhiya ay na-convert sa elektrikal na enerhiya, atbp.
Sa kasalukuyan, ang konsepto ng enerhiya ay isa sa mga pangunahing konsepto ng pisika. Ang konseptong ito ay inextricably na nauugnay sa ideya ng pagbabago ng isang anyo ng paggalaw patungo sa isa pa.
Narito kung paano nabuo ang konsepto ng enerhiya sa modernong pisika:
Ang enerhiya ay isang pangkalahatang sukat ng dami ng paggalaw at pakikipag-ugnayan ng lahat ng uri ng bagay. Ang enerhiya ay hindi nagmumula sa wala at hindi nawawala, maaari lamang itong lumipat mula sa isang anyo patungo sa isa pa. Ang konsepto ng enerhiya ay nagbubuklod sa lahat ng mga phenomena ng kalikasan.
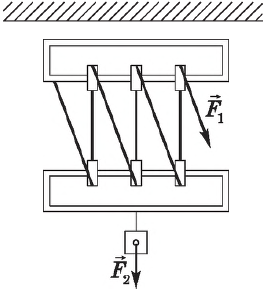
mga simpleng mekanismo. kahusayan ng mekanismo
Ang mga simpleng mekanismo ay mga aparato na nagbabago sa laki o direksyon ng mga puwersang inilapat sa katawan.
Ginagamit ang mga ito upang ilipat o buhatin ang malalaking kargada na may kaunting pagsisikap. Kabilang dito ang lever at ang mga varieties nito - mga bloke (movable at fixed), isang gate, isang hilig na eroplano at mga varieties nito - isang wedge, isang turnilyo, atbp.
braso ng pingga. Panuntunan ng pingga
Ang pingga ay isang matibay na katawan na may kakayahang umikot sa paligid ng isang nakapirming suporta.

Ang leverage rule ay nagsasabi:
Ang isang pingga ay nasa equilibrium kung ang mga puwersang inilapat dito ay inversely proportional sa kanilang mga braso:
$(F_2)/(F_1)=(l_1)/(l_2)$
Mula sa formula na $(F_2)/(F_1)=(l_1)/(l_2)$, inilalapat ang pag-aari ng proporsyon dito (ang produkto ng mga matinding termino ng proporsyon ay katumbas ng produkto ng mga gitnang termino nito), kami maaaring makuha ang sumusunod na formula:
Ngunit ang $F_1l_1=M_1$ ay ang sandali ng puwersa na may posibilidad na paikutin ang pingga pakanan, at ang $F_2l_2=M_2$ ay ang sandali ng puwersa na may posibilidad na paikutin ang pingga nang pakaliwa. Kaya, $M_1=M_2$, na dapat patunayan.
Ang pingga ay nagsimulang gamitin ng mga tao noong sinaunang panahon. Sa tulong nito, posible na iangat ang mabibigat na mga slab ng bato sa panahon ng pagtatayo ng mga pyramids sa sinaunang Egypt. Kung walang leverage, hindi ito magiging posible. Sa katunayan, halimbawa, para sa pagtatayo ng pyramid ng Cheops, na may taas na $147$ m, higit sa dalawang milyong bloke ng bato ang ginamit, ang pinakamaliit sa mga ito ay may bigat na $2.5$ tonelada!
Sa ngayon, ang mga lever ay malawakang ginagamit kapwa sa produksyon (halimbawa, mga crane) at sa pang-araw-araw na buhay (gunting, wire cutter, kaliskis).
Nakapirming bloke
Ang pagkilos ng isang nakapirming bloke ay katulad ng pagkilos ng isang pingga na may pantay na pagkilos: $l_1=l_2=r$. Ang inilapat na puwersa $F_1$ ay katumbas ng pagkarga $F_2$, at ang kondisyon ng equilibrium ay:
Nakapirming bloke ginagamit kapag kailangan mong baguhin ang direksyon ng isang puwersa nang hindi binabago ang magnitude nito.
Movable block
Ang movable block ay kumikilos katulad ng isang lever, na ang mga braso ay: $l_2=(l_1)/(2)=r$. Sa kasong ito, ang kondisyon ng ekwilibriyo ay may anyo:
kung saan ang $F_1$ ay ang inilapat na puwersa, ang $F_2$ ay ang pagkarga. Ang paggamit ng isang movable block ay nagbibigay ng pakinabang sa lakas ng dalawang beses.
Polyspast (block system)
Ang isang ordinaryong chain hoist ay binubuo ng $n$ movable at $n$ fixed blocks. Ang paglalapat nito ay nagbibigay ng pakinabang sa lakas ng $2n$ beses:
$F_1=(F_2)/(2n)$
Power chain hoist binubuo ng n movable at isang fixed block. Ang paggamit ng power chain hoist ay nagbibigay ng pagtaas sa lakas ng $2^n$ beses:
$F_1=(F_2)/(2^n)$

tornilyo
Ang tornilyo ay isang inclined plane wound sa axis.

Ang kondisyon para sa balanse ng mga puwersa na kumikilos sa tornilyo ay may anyo:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

kung saan ang $F_1$ ay isang panlabas na puwersa na inilapat sa turnilyo at kumikilos sa layo na $R$ mula sa axis nito; Ang $F_2$ ay ang puwersang kumikilos sa direksyon ng axis ng turnilyo; $h$ - turnilyo pitch; $r$ ay ang average na radius ng thread; $α$ ang anggulo ng thread. Ang $R$ ay ang haba ng lever (wrench) na umiikot sa turnilyo na may puwersang $F_1$.
Kahusayan
Coefficient of performance (COP) - ang ratio ng kapaki-pakinabang na trabaho sa lahat ng trabahong ginastos.
Ang kahusayan ay madalas na ipinahayag bilang isang porsyento at tinutukoy ng titik ng Griyego na $η$ ("ito"):
$η=(A_p)/(A_3) 100%$
kung saan ang $A_n$ ay kapaki-pakinabang na gawain, ang $A_3$ ay ang lahat ng gawaing ginugol.
Ang kapaki-pakinabang na trabaho ay palaging bahagi lamang ng kabuuang trabaho na ginugugol ng isang tao gamit ito o ang mekanismong iyon.
Ang bahagi ng gawaing ginawa ay ginugugol sa pagtagumpayan ng mga puwersa ng alitan. Dahil $А_3 > А_п$, ang kahusayan ay palaging mas mababa sa $1$ (o $< 100%$).
Dahil ang bawat isa sa mga gawa sa equation na ito ay maaaring ipahayag bilang produkto ng katumbas na puwersa at ang distansyang nilakbay, maaari itong muling isulat bilang mga sumusunod: $F_1s_1≈F_2s_2$.
Mula dito ay sumusunod na, nanalo sa tulong ng mekanismong ipinapatupad, natalo tayo sa parehong bilang ng beses sa daan, at kabaliktaran. Ang batas na ito ay tinatawag na ginintuang tuntunin ng mekanika.
Ang ginintuang tuntunin ng mekanika ay isang tinatayang batas, dahil hindi nito isinasaalang-alang ang gawain upang mapagtagumpayan ang alitan at gravity ng mga bahagi ng mga aparatong ginamit. Gayunpaman, maaari itong maging lubhang kapaki-pakinabang kapag sinusuri ang pagpapatakbo ng anumang simpleng mekanismo.

Kaya, halimbawa, salamat sa panuntunang ito, maaari nating agad na sabihin na ang manggagawa na ipinakita sa figure, na may dobleng pakinabang sa puwersa ng pag-angat na $10$ cm, ay kailangang ibaba ang kabaligtaran na dulo ng pingga ng $20$ cm.
Pagbangga ng mga katawan. Nababanat at hindi nababanat na mga epekto
Ang mga batas ng konserbasyon ng momentum at mekanikal na enerhiya ay ginagamit upang malutas ang problema ng paggalaw ng mga katawan pagkatapos ng banggaan: ang kilalang momenta at enerhiya bago ang banggaan ay ginagamit upang matukoy ang mga halaga ng mga dami na ito pagkatapos ng banggaan. Isaalang-alang ang mga kaso ng nababanat at hindi nababanat na mga epekto.
Ang isang ganap na hindi nababanat na epekto ay tinatawag, pagkatapos kung saan ang mga katawan ay bumubuo ng isang solong katawan na gumagalaw sa isang tiyak na bilis. Ang problema sa bilis ng huli ay nalutas gamit ang batas ng konserbasyon ng momentum para sa isang sistema ng mga katawan na may masa na $m_1$ at $m_2$ (kung pinag-uusapan natin ang tungkol sa dalawang katawan) bago at pagkatapos ng epekto:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Malinaw, ang kinetic energy ng mga katawan ay hindi natipid sa panahon ng isang hindi nababanat na epekto (halimbawa, sa $(υ_1)↖(→)=-(υ_2)↖(→)$ at $m_1=m_2$ ito ay magiging katumbas ng zero pagkatapos ng epekto).
Ang isang ganap na nababanat na epekto ay tinatawag, kung saan hindi lamang ang kabuuan ng mga impulses ay napanatili, kundi pati na rin ang kabuuan ng mga kinetic energies ng mga nagbabanggaang katawan.
Para sa isang ganap na nababanat na epekto, ang mga equation
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2 )^2)/(2)$
kung saan ang $m_1, m_2$ ay ang masa ng mga bola, ang $υ_1, υ_2$ ay ang mga bilis ng mga bola bago ang impact, ang $υ"_1, υ"_2$ ay ang mga bilis ng mga bola pagkatapos ng impact.
Salpok ng puwersa at momentum ng katawan
Tulad ng ipinakita, ang pangalawang batas ni Newton ay maaaring isulat bilang
Ft=mv-mv o=p-p o=D p.
Ang dami ng vector na Ft, katumbas ng produkto ng puwersa at oras ng pagkilos nito, ay tinatawag momentum ng puwersa. Ang dami ng vector p=mv, na katumbas ng produkto ng masa ng katawan at ang bilis nito, ay tinatawag momentum ng katawan.
Sa SI, ang unit ng momentum ay ang momentum ng isang katawan na may mass na 1 kg na gumagalaw sa bilis na 1 m/s, i.e. ang unit ng momentum ay kilometer per second (1 kg m/s).
Ang pagbabago sa momentum ng katawan D p sa paglipas ng panahon t ay katumbas ng momentum ng puwersa Ft na kumikilos sa katawan sa panahong ito.
Ang konsepto ng momentum ay isa sa mga pangunahing konsepto ng pisika. Ang momentum ng isang katawan ay isa sa mga dami na may kakayahang, sa ilalim ng ilang mga kundisyon, na mapanatili ang halaga nito nang hindi nagbabago.(ngunit modulo, at sa direksyon).
Conservation ng kabuuang momentum ng isang closed system
saradong sistema tumawag sa isang grupo ng mga katawan na hindi nakikipag-ugnayan sa anumang iba pang mga katawan na hindi bahagi ng grupong ito. Ang mga puwersa ng pakikipag-ugnayan sa pagitan ng mga katawan sa isang saradong sistema ay tinatawag panloob. (Ang mga panloob na puwersa ay karaniwang tinutukoy ng titik f).
Isaalang-alang ang pakikipag-ugnayan ng mga katawan sa loob ng saradong sistema. Hayaan ang dalawang bola ng parehong diameter, na gawa sa iba't ibang mga sangkap (iyon ay, pagkakaroon ng iba't ibang masa), gumulong sa isang perpektong makinis na pahalang na ibabaw at bumangga sa isa't isa. Sa panahon ng epekto, na isasaalang-alang namin ang sentral at ganap na nababanat, nagbabago ang mga bilis at momenta ng mga bola. Hayaan ang masa ng unang bola m 1 , ang bilis nito bago ang impact V 1 , at pagkatapos ng impact V 1 "; ang masa ng pangalawang bola m 2 , ang bilis nito bago ang impact v 2 , pagkatapos ng impact v 2 ". Ayon sa ikatlong batas ni Newton, ang mga puwersa ng pakikipag-ugnayan sa pagitan ng mga bola ay pantay sa ganap na halaga at kabaligtaran sa direksyon, i.e. f 1 \u003d -f 2.
Ayon sa ikalawang batas ni Newton, ang pagbabago sa momenta ng mga bola bilang resulta ng kanilang banggaan ay katumbas ng momentum ng mga puwersa ng pakikipag-ugnayan sa pagitan nila, i.e.
m 1 v 1 "-m 1 v 1 \u003d f 1 t (3.1)
m 2 v 2 "-m 2 v 2 \u003d f 2 t (3.2)
kung saan ang t ay ang oras ng pakikipag-ugnayan ng mga bola.
Ang pagdaragdag ng mga expression (3.1) at (3.2) na termino sa pamamagitan ng termino, nakita namin iyon
m 1 v 1 "-m 1 v 1 + m 2 v 2 "-m 2 v 2 \u003d 0.
Kaya naman,
m 1 v 1 "+m 2 v 2" \u003d m 1 v 1 + m 2 v 2
o kung hindi man
p 1 "+p 2" \u003d p 1 +p 2. (3.3)
Tukuyin natin ang p 1 "+p 2 "=p" at p 1 +p 2 =p.
Ang vector sum ng mga impulses ng lahat ng katawan na kasama sa system ay tinatawag buong salpok ng sistemang ito. Mula sa (3.3) makikita na ang p "= p, i.e. p" - p \u003d D p \u003d 0, samakatuwid,
p=p 1 +p 2 = const.
Ang formula (3.4) ay nagpapahayag batas ng konserbasyon ng momentum sa isang saradong sistema, na binabalangkas tulad ng sumusunod: ang kabuuang momentum ng isang saradong sistema ng mga katawan ay nananatiling pare-pareho para sa anumang pakikipag-ugnayan ng mga katawan ng sistemang ito sa isa't isa.
Sa madaling salita, hindi maaaring baguhin ng mga panloob na pwersa ang kabuuang momentum ng system alinman sa ganap na halaga o sa direksyon.
Pagbabago sa kabuuang momentum ng isang bukas na sistema
Ang isang pangkat ng mga katawan na nakikipag-ugnayan hindi lamang sa isa't isa, kundi pati na rin sa mga katawan na hindi bahagi ng pangkat na ito, ay tinatawag bukas na sistema. Ang mga puwersa kung saan ang mga katawan na hindi kasama sa sistemang ito ay kumikilos sa mga katawan ng isang partikular na sistema ay tinatawag na mga panlabas na pwersa (karaniwang panlabas na pwersa ay tinutukoy ng titik F).
Isaalang-alang ang pakikipag-ugnayan ng dalawang katawan sa isang bukas na sistema. Ang pagbabago sa mga impulses ng mga katawan na ito ay nangyayari kapwa sa ilalim ng pagkilos ng mga panloob na pwersa at sa ilalim ng pagkilos ng mga panlabas na pwersa.
Ayon sa pangalawang batas ni Newton, ang mga pagbabago sa momenta ng mga katawan na isinasaalang-alang para sa una at pangalawang katawan ay
D p 1 \u003d f 1 t + F 1 t (3.5)
D p 2 \u003d f 2 t + F 2 t (3.6)
kung saan ang t ay ang oras ng pagkilos ng mga panlabas at panloob na pwersa.
Ang pagdaragdag ng mga expression (3.5) at (3.6) na termino sa pamamagitan ng termino, nakita namin iyon
D (p 1 +p 2)=(f 1 +f 2)t +(F 1 +F 2)t (3.7)
Sa formula na ito, p \u003d p 1 + p 2 - ang kabuuang momentum ng system, f 1 + f 2 \u003d 0 (dahil, ayon sa ikatlong batas ni Newton (f 1 \u003d -f 2), F 1 + F 2 \u003d Ang F ay ang resulta ng lahat ng panlabas na puwersa , na kumikilos sa mga katawan ng ibinigay na sistema Sa pagtingin sa kung ano ang sinabi, ang formula (3.7) ay kumukuha ng anyo
Dp=Ft. (3.8)
Mula sa (3.8) makikita na ang kabuuang momentum ng system ay nagbabago lamang sa ilalim ng pagkilos ng mga panlabas na pwersa. Kung ang sistema ay sarado, ibig sabihin, F=0, pagkatapos ay D p=0 at, dahil dito, p=const. Kaya, ang formula (3.4) ay isang partikular na kaso ng formula (3.8), na nagpapakita sa ilalim ng kung anong mga kondisyon ang kabuuang momentum ng system ay napanatili, at sa ilalim ng kung anong mga kundisyon ang nagbabago.
Pagpapaandar ng jet.
Ang kahalagahan ng gawain ni Tsiolkovsky para sa mga astronautika
Ang paggalaw ng isang katawan na nangyayari bilang resulta ng paghihiwalay ng bahagi ng masa nito mula dito sa isang tiyak na bilis ay tinatawag reaktibo.
Ang lahat ng mga uri ng paggalaw, maliban sa reaktibo, ay imposible nang walang pagkakaroon ng mga puwersang panlabas sa isang naibigay na sistema, ibig sabihin, nang walang pakikipag-ugnayan ng mga katawan ng sistemang ito sa kapaligiran, at para sa pagpapatupad ng jet propulsion, ang pakikipag-ugnayan ng katawan sa kapaligiran ay hindi kinakailangan. Sa una, ang system ay nakapahinga, ibig sabihin, ang kabuuang momentum nito ay zero. Kapag ang isang bahagi ng masa nito ay nagsimulang ilabas mula sa system sa isang tiyak na bilis, kung gayon (dahil ang kabuuang momentum ng isang saradong sistema, ayon sa batas ng konserbasyon ng momentum, ay dapat manatiling hindi nagbabago), ang sistema ay tumatanggap ng isang bilis na nakadirekta sa ang kabaligtaran ng direksyon. Sa katunayan, dahil m 1 v 1 + m 2 v 2 \u003d 0, pagkatapos ay m 1 v 1 \u003d -m 2 v 2, i.e.
v 2 \u003d -v 1 m 1 / m 2.
Ito ay sumusunod mula sa formula na ito na ang bilis v 2 na nakuha ng system na may mass m 2 ay depende sa ejected mass m 1 at ang bilis v 1 ng pagbuga nito.
Ang isang heat engine kung saan ang thrust force na nagmumula sa reaksyon ng isang jet ng mga papalabas na mainit na gas ay direktang inilapat sa katawan nito ay tinatawag na jet engine. Hindi tulad ng ibang mga sasakyan, ang isang jet-powered device ay maaaring lumipat sa outer space.
Ang nagtatag ng teorya ng mga flight sa kalawakan ay ang natitirang siyentipikong Ruso na si Tsiolkovsky (1857 - 1935). Ibinigay niya ang pangkalahatang pundasyon ng teorya ng jet propulsion, binuo ang mga pangunahing prinsipyo at scheme ng jet aircraft, at pinatunayan ang pangangailangan ng paggamit ng multi-stage rocket para sa interplanetary flight. Ang mga ideya ni Tsiolkovsky ay matagumpay na ipinatupad sa USSR sa pagtatayo ng mga artipisyal na Earth satellite at spacecraft.
Ang nagtatag ng praktikal na astronautics ay ang siyentipikong Sobyet na si Academician Korolev (1906 - 1966). Sa ilalim ng kanyang pamumuno, ang unang artipisyal na Earth satellite ay nilikha at inilunsad, ang unang manned flight sa kalawakan sa kasaysayan ng sangkatauhan ay naganap. Ang unang cosmonaut ng Earth ay ang taong Sobyet na si Yu.A. Gagarin (1934 - 1968).
Mga tanong para sa pagpipigil sa sarili:
- Paano isinusulat ang ikalawang batas ni Newton sa impulsive form?
- Ano ang tinatawag na impulse of force? momentum ng katawan?
- Anong sistema ng mga katawan ang tinatawag na sarado?
- Ano ang tinatawag na panloob na pwersa?
- Gamit ang halimbawa ng pakikipag-ugnayan ng dalawang katawan sa isang saradong sistema, ipakita kung paano itinatag ang batas ng konserbasyon ng momentum. Paano ito nabuo?
- Ano ang kabuuang momentum ng isang sistema?
- Maaari bang baguhin ng mga panloob na puwersa ang kabuuang momentum ng system?
- Anong sistema ng mga katawan ang tinatawag na bukas?
- Anong mga puwersa ang tinatawag na panlabas?
- Magtatag ng isang formula na nagpapakita sa ilalim ng kung anong mga kundisyon ang kabuuang momentum ng system ay nagbabago, at sa ilalim ng kung anong mga kundisyon ito ay napanatili.
- Ano ang isang reaktibong kilusan?
- Maaari ba itong mangyari nang walang interaksyon ng gumagalaw na katawan sa kapaligiran?
- Ano ang batas ng jet propulsion?
- Ano ang kahalagahan ng gawain ni Tsiolkovsky para sa astronautics?
Kung sa isang katawan ng mass m para sa isang tiyak na tagal ng panahon Δ t kumikilos ang puwersa F →, pagkatapos ay sumusunod ang pagbabago sa bilis ng katawan ∆ v → = v 2 → - v 1 →. Nakukuha namin iyon sa panahon ng Δ t ang katawan ay patuloy na gumagalaw nang may pagbilis:
a → = ∆ v → ∆ t = v 2 → - v 1 → ∆ t .
Batay sa pangunahing batas ng dinamika, iyon ay, ang pangalawang batas ni Newton, mayroon tayong:
F → = m a → = m v 2 → - v 1 → ∆ t o F → ∆ t = m v 2 → - m v 1 → = m ∆ v → = ∆ m v → .
Kahulugan 1momentum ng katawan, o dami ng paggalaw ay isang pisikal na dami na katumbas ng produkto ng masa ng katawan at ang bilis ng paggalaw nito.
Ang momentum ng isang katawan ay itinuturing na dami ng vector, na sinusukat sa kilo-meter bawat segundo (k g m / s).
Kahulugan 2
Salpok ng puwersa ay isang pisikal na dami na katumbas ng produkto ng puwersa at ang oras ng pagkilos nito.
Ang momentum ay tinutukoy bilang mga dami ng vector. May isa pang pagbabalangkas ng kahulugan.
Kahulugan 3
Ang pagbabago sa momentum ng katawan ay katumbas ng momentum ng puwersa.
Sa momentum na ipinahiwatig p → Ang pangalawang batas ni Newton ay nakasulat bilang:
F → ∆t = ∆p → .
Ang form na ito ay nagpapahintulot sa amin na bumalangkas ng pangalawang batas ni Newton. Ang Force F → ay ang resulta ng lahat ng pwersang kumikilos sa katawan. Ang pagkakapantay-pantay ay isinulat bilang mga projection sa mga coordinate axes ng view:
F x Δ t = Δ p x ; F y ∆t = ∆p y ; Fz ∆t = ∆pz .
Larawan 1. labing-anim . isa. Modelo ng momentum ng katawan.
Ang pagbabago sa projection ng momentum ng katawan sa alinman sa tatlong mutually perpendicular axes ay katumbas ng projection ng force impulse sa parehong axis.
Kahulugan 4
Isang-dimensional na paggalaw ay ang paggalaw ng isang katawan kasama ang isa sa mga coordinate axes.
Halimbawa 1
Bilang halimbawa, isaalang-alang ang libreng pagkahulog ng isang katawan na may paunang bilis na v 0 sa ilalim ng pagkilos ng gravity sa loob ng isang panahon t. Kapag ang direksyon ng axis O Y ay patayo pababa, ang momentum ng gravity F t \u003d mg, na kumikilos sa oras t, ay katumbas m g t. Ang ganitong salpok ay katumbas ng pagbabago sa momentum ng katawan:
F t t \u003d m g t \u003d Δ p \u003d m (v - v 0), kung saan v \u003d v 0 + g t.
Ang entry ay tumutugma sa kinematic formula para sa pagtukoy ng bilis ng pantay na pinabilis na paggalaw. Ang modulus ng puwersa ay hindi nagbabago mula sa buong pagitan t. Kapag ito ay variable sa magnitude, kung gayon ang momentum formula ay nangangailangan ng pagpapalit ng average na halaga ng puwersa F na may p mula sa pagitan ng oras t. Larawan 1. labing-anim . Ipinapakita ng 2 kung paano tinutukoy ang momentum ng isang puwersa na nakasalalay sa oras.

Larawan 1. labing-anim . 2. Pagkalkula ng salpok ng puwersa mula sa plot ng F (t)
Ito ay kinakailangan upang piliin ang pagitan Δ t sa oras axis, ito ay malinaw na ang puwersa F(t) halos hindi nagbabago. Puwersa ang salpok F (t) Δ t para sa isang tagal ng panahon Δ t ay magiging katumbas ng lugar ng shaded figure. Kapag hinahati ang axis ng oras sa mga pagitan ng Δ t i sa pagitan mula 0 hanggang t, idagdag ang mga impulses ng lahat ng kumikilos na pwersa mula sa mga pagitan na ito Δ t i , kung gayon ang kabuuang salpok ng puwersa ay magiging katumbas ng lugar ng pagbuo gamit ang stepped at time axes.
Paglalapat ng limitasyon (Δ t i → 0) , mahahanap mo ang lugar na lilimitahan ng graph F(t) at ang t axis. Ang paggamit ng kahulugan ng salpok ng puwersa mula sa iskedyul ay naaangkop sa anumang mga batas kung saan may nagbabagong puwersa at oras. Ang solusyon na ito ay humahantong sa pagsasama ng function F(t) mula sa pagitan [ 0 ; t] .
Larawan 1. labing-anim . Ang 2 ay nagpapakita ng salpok ng puwersa, na nasa pagitan mula t 1 = 0 s hanggang t 2 = 10 .
Mula sa formula nakuha namin na F c p (t 2 - t 1) \u003d 1 2 F m a x (t 2 - t 1) \u003d 100 N s \u003d 100 kg m / s.
Iyon ay, ang halimbawa ay nagpapakita ng F na may p \u003d 1 2 F m a x \u003d 10 N.
May mga kaso kapag ang pagpapasiya ng average na puwersa F na may p ay posible sa kilalang oras at data sa naiulat na momentum. Sa isang malakas na epekto sa isang bola na may mass na 0.415 kg, maaaring maiulat ang isang bilis na katumbas ng v \u003d 30 m / s. Ang tinatayang oras ng epekto ay 8 10 – 3 s.
Pagkatapos ang formula ng momentum ay kumukuha ng form:
p = m v = 12.5 kg g m/s.
Upang matukoy ang average na puwersa F c p sa panahon ng epekto, kinakailangan F c p = p ∆ t = 1.56 10 3 N.
Nakakuha kami ng napakalaking halaga, na katumbas ng isang katawan na may mass na 160 kg.
Kapag ang paggalaw ay nangyari sa isang hubog na landas, pagkatapos ay ang paunang halaga p 1 → at ang pangwakas
p 2 → maaaring magkaiba sa modulus at direksyon. Upang matukoy ang momentum ∆ p → gamitin ang momentum diagram, kung saan mayroong mga vectors p 1 → at p 2 → , at ∆ p → = p 2 → - p 1 → na binuo ayon sa parallelogram rule.
Halimbawa 2
Ang Figure 1 ay ipinapakita bilang isang halimbawa. labing-anim . 2, kung saan iginuhit ang isang diagram ng mga impulses ng bolang tumatalbog sa dingding. Kapag naghahain, ang bola na may mass m na may bilis na v 1 → ay tumama sa ibabaw sa isang anggulo α sa normal at rebound nang may bilis na v 2 → na may anggulo β . Kapag tumama sa dingding, ang bola ay sumailalim sa puwersa F → nakadirekta sa parehong paraan tulad ng vector ∆ p → .

Larawan 1. labing-anim . 3 . Ball rebound mula sa isang magaspang na pader at momentum diagram.
Kung may normal na pagbagsak ng bola na may mass m sa isang nababanat na ibabaw na may bilis na v 1 → = v → , pagkatapos ay sa panahon ng rebound ito ay magbabago sa v 2 → = - v → . Nangangahulugan ito na para sa isang tiyak na tagal ng panahon ay magbabago ang momentum at magiging katumbas ng ∆ p → = - 2 m v → . Gamit ang mga projection sa ОХ, ang resulta ay isusulat bilang Δ p x = – 2 m v x . Mula sa pagguhit 1 . 16 . 3 makikita na ang ОХ axis ay nakadirekta palayo sa dingding, pagkatapos ay v x< 0 и Δ p x >0 . Mula sa formula nakuha namin na ang modulus Δ p ay nauugnay sa modulus ng bilis, na kumukuha ng form na Δ p = 2 m v.
Kung may napansin kang pagkakamali sa text, mangyaring i-highlight ito at pindutin ang Ctrl+Enter
Pulse (Dami ng paggalaw) ay isang vector pisikal na dami, na isang sukatan ng mekanikal na paggalaw ng katawan. Sa klasikal na mekanika, ang momentum ng isang katawan ay katumbas ng produkto ng masa m ang katawan na ito sa bilis nito v, ang direksyon ng momentum ay tumutugma sa direksyon ng velocity vector:
Momentum ng system ang mga particle ay ang vector sum ng momenta ng mga indibidwal na particle nito: p=(sums) pi, saan pi ay ang momentum ng i-th particle.
Theorem sa pagbabago sa momentum ng system: ang kabuuang momentum ng system ay mababago lamang sa pamamagitan ng pagkilos ng mga panlabas na puwersa: Fext=dp/dt(1), i.e. ang time derivative ng momentum ng system ay katumbas ng vector sum ng lahat ng panlabas na pwersa na kumikilos sa mga particle ng system. Tulad ng kaso ng isang particle, sumusunod ito mula sa expression (1) na ang pagtaas ng momentum ng system ay katumbas ng momentum ng resulta ng lahat ng panlabas na pwersa para sa kaukulang yugto ng panahon:
p2-p1= t & 0 F ext dt.
Sa classical mechanics, kumpleto momentum Ang sistema ng mga punto ng materyal ay tinatawag na dami ng vector na katumbas ng kabuuan ng mga produkto ng masa ng mga materyal na punto sa kanilang bilis:
![]()
nang naaayon, ang dami ay tinatawag na momentum ng isang materyal na punto. Ito ay isang dami ng vector na nakadirekta sa parehong direksyon ng bilis ng particle. Ang yunit ng momentum sa International System of Units (SI) ay kilo metro bawat segundo(kg m/s).
Kung tayo ay nakikitungo sa isang katawan na may hangganan na sukat, na hindi binubuo ng mga discrete material na puntos, upang matukoy ang momentum nito, kinakailangan na hatiin ang katawan sa maliliit na bahagi, na maaaring ituring bilang materyal na mga punto at kabuuan sa kanila, bilang isang resulta na makukuha natin:
Ang momentum ng isang sistema na hindi apektado ng anumang panlabas na pwersa (o sila ay nabayaran), iniingatan sa oras:
Ang konserbasyon ng momentum sa kasong ito ay sumusunod sa pangalawa at pangatlong batas ni Newton: ang pagsulat ng pangalawang batas ni Newton para sa bawat materyal na punto na bumubuo sa sistema at pagbubuod nito sa lahat ng materyal na punto na bumubuo sa sistema, sa bisa ng pangatlo ni Newton. batas na nakukuha natin ang pagkakapantay-pantay (*).
Sa relativistic mechanics, ang tatlong-dimensional na momentum ng isang sistema ng hindi nakikipag-ugnayan na mga punto ng materyal ay ang dami
 ,
,
saan m i- timbang i-ika materyal na punto.
Para sa isang saradong sistema ng hindi nakikipag-ugnayan na mga punto ng materyal, pinapanatili ang halagang ito. Gayunpaman, ang three-dimensional na momentum ay hindi isang relativistically invariant na dami, dahil ito ay nakasalalay sa frame of reference. Ang isang mas makabuluhang halaga ay isang four-dimensional na momentum, na para sa isang materyal na punto ay tinukoy bilang

Sa pagsasagawa, ang mga sumusunod na ugnayan sa pagitan ng masa, momentum, at enerhiya ng isang particle ay kadalasang ginagamit:
Sa prinsipyo, para sa isang sistema ng hindi nakikipag-ugnayan na mga punto ng materyal, ang kanilang 4 na sandali ay ibinubuo. Gayunpaman, para sa pakikipag-ugnayan ng mga particle sa relativistic mechanics, dapat isaalang-alang ang momenta hindi lamang ng mga particle na bumubuo sa system, kundi pati na rin ang momentum ng larangan ng pakikipag-ugnayan sa pagitan nila. Samakatuwid, ang isang mas makabuluhang dami sa relativistic mechanics ay ang energy-momentum tensor, na ganap na nakakatugon sa mga batas sa konserbasyon.
Mga Katangian ng Pulse
· Pagkadagdag. Ang pag-aari na ito ay nangangahulugan na ang impulse ng isang mekanikal na sistema na binubuo ng mga materyal na puntos ay katumbas ng kabuuan ng mga impulses ng lahat ng mga materyal na punto na kasama sa system.
· Invariance na may kinalaman sa pag-ikot ng frame of reference.
· Pagpapanatili. Ang momentum ay hindi nagbabago sa ilalim ng mga pakikipag-ugnayan na nagbabago lamang sa mga mekanikal na katangian ng system. Ang pag-aari na ito ay invariant kaugnay ng mga pagbabagong-anyo ng Galilea. Ang mga katangian ng konserbasyon ng kinetic energy, conservation ng momentum at ang pangalawang batas ni Newton ay sapat upang makuha ang mathematical formula para sa momentum.
Batas ng konserbasyon ng momentum (Batas ng konserbasyon ng momentum)- ang kabuuan ng vector ng mga impulses ng lahat ng mga katawan ng system ay isang pare-parehong halaga, kung ang kabuuan ng vector ng mga panlabas na puwersa na kumikilos sa system ay katumbas ng zero.
Sa klasikal na mekanika, ang batas ng konserbasyon ng momentum ay karaniwang hinango bilang resulta ng mga batas ni Newton. Mula sa mga batas ni Newton, maipapakita na kapag gumagalaw sa walang laman na espasyo, ang momentum ay pinananatili sa oras, at sa pagkakaroon ng pakikipag-ugnayan, ang rate ng pagbabago nito ay tinutukoy ng kabuuan ng inilapat na puwersa.
Tulad ng alinman sa mga pangunahing batas sa konserbasyon, ang batas ng konserbasyon ng momentum ay nauugnay, ayon sa teorama ni Noether, sa isa sa mga pangunahing simetriko - ang homogeneity ng espasyo
Ang pagbabago sa momentum ng isang katawan ay katumbas ng momentum ng resulta ng lahat ng pwersang kumikilos sa katawan. Ito ay isa pang pagbabalangkas ng pangalawang batas ni Newton.


