Alle Probleme mit bewegten Körpern in der klassischen Mechanik erfordern Kenntnisse des Impulskonzepts. Dieser Artikel diskutiert dieses Konzept, gibt eine Antwort auf die Frage, wohin der Impulsvektor des Körpers gerichtet ist, und liefert auch ein Beispiel für die Lösung des Problems.
Anzahl der Bewegungen
Um herauszufinden, wohin der Impulsvektor des Körpers gerichtet ist, muss zunächst seine physikalische Bedeutung verstanden werden. Der Begriff wurde erstmals von Isaac Newton erklärt, es ist jedoch wichtig zu beachten, dass der italienische Wissenschaftler Galileo Galilei in seinen Werken bereits ein ähnliches Konzept verwendete. Um ein sich bewegendes Objekt zu charakterisieren, führte er eine Größe ein, die Aspiration, Ansturm oder eigentlicher Impuls (impeto auf Italienisch) genannt wird. Das Verdienst von Isaac Newton liegt darin, dass er diese Eigenschaft mit den auf den Körper wirkenden Kräften in Verbindung bringen konnte.
Was die meisten Menschen also unter dem Impuls des Körpers verstehen, nennen wir zunächst und korrekter den Impuls. Tatsächlich lautet die mathematische Formel für die betrachtete Größe wie folgt:
Dabei ist m die Masse des Körpers, v¯ seine Geschwindigkeit. Wie aus der Formel hervorgeht, handelt es sich nicht um einen Impuls, sondern nur um die Geschwindigkeit des Körpers und seine Masse, also um das Ausmaß der Bewegung.
Es ist wichtig zu beachten, dass diese Formel nicht aus mathematischen Beweisen oder Ausdrücken folgt. Sein Vorkommen in der Physik hat ausschließlich intuitiven, alltäglichen Charakter. Jeder Mensch ist sich also bewusst, dass, wenn sich eine Fliege und ein Lastwagen mit der gleichen Geschwindigkeit bewegen, der Lastwagen viel schwerer zu stoppen ist, da er viel mehr Bewegung hat als ein Insekt.

Der Ursprung des Konzepts des Impulsvektors des Körpers wird unten diskutiert.
Der Kraftimpuls ist die Ursache für die Impulsänderung
Newton konnte das intuitiv eingeführte Merkmal mit dem zweiten Hauptsatz in Verbindung bringen, der seinen Nachnamen trägt.
Der Kraftimpuls ist eine bekannte physikalische Größe, die dem Produkt der auf einen Körper zum Zeitpunkt seiner Wirkung ausgeübten äußeren Kraft entspricht. Unter Verwendung des bekannten Newtonschen Gesetzes und unter der Annahme, dass die Kraft nicht von der Zeit abhängt, können wir zu folgendem Ausdruck kommen:
F¯ * Δt = m * a¯ * Δt.
Dabei ist Δt die Wirkungszeit der Kraft F, a die lineare Beschleunigung, die die Kraft F auf einen Körper der Masse m ausübt. Wie Sie wissen, führt die Multiplikation der Beschleunigung eines Körpers mit der Zeitspanne, in der er wirkt, zu einer Erhöhung der Geschwindigkeit. Diese Tatsache ermöglicht es uns, die obige Formel in einer etwas anderen Form umzuschreiben:
F¯ * Δt = m * Δv¯, wobei Δv¯= a¯ * Δt.
Die rechte Seite der Gleichung stellt die Impulsänderung dar (siehe den Ausdruck im vorherigen Absatz). Dann wird sich herausstellen:
F¯ * Δt = Δp¯, wobei Δp¯ = m * Δv¯.
Unter Verwendung des Newtonschen Gesetzes und des Konzepts des Impulses einer Kraft kann man also zu einer wichtigen Schlussfolgerung kommen: Die Einwirkung einer äußeren Kraft auf ein Objekt für einige Zeit führt zu einer Änderung seines Impulses.

Nun wird klar, warum die Bewegungsgröße üblicherweise als Impuls bezeichnet wird, weil ihre Änderung mit dem Impuls der Kraft zusammenfällt (das Wort „Kraft“ wird in der Regel weggelassen).
Die Vektorgröße p¯

Über einigen Größen (F¯, v¯, a¯, p¯) befindet sich ein Balken. Es handelt sich also um eine Vektorcharakteristik. Das heißt, die Bewegungsgröße sowie Geschwindigkeit, Kraft und Beschleunigung werden neben dem Absolutwert (Modul) auch durch die Richtung beschrieben.
Da jeder Vektor in separate Komponenten zerlegt werden kann, können wir unter Verwendung des kartesischen rechtwinkligen Koordinatensystems die folgenden Gleichungen schreiben:
1) p¯ = m * v¯;
2) p x \u003d m * v x; p y = m * v y ; p z = m * v z ;
3) |p¯| = √(p x 2 + p y 2 + p z 2).
Hier ist der 1. Ausdruck die Vektorform der Impulsdarstellung, mit dem 2. Formelsatz können Sie jede der Impulskomponenten p¯ berechnen, wobei Sie die entsprechenden Geschwindigkeitskomponenten kennen (Indizes x, y, z geben die Projektion des Vektors an der entsprechenden Koordinatenachse). Mit der dritten Formel können Sie schließlich die Länge des Impulsvektors (den Absolutwert der Größe) anhand seiner Komponenten berechnen.
Wohin ist der Impulsvektor des Körpers gerichtet?
Nachdem man den Begriff des Impulses p¯ und seine Grundeigenschaften betrachtet hat, kann man die gestellte Frage leicht beantworten. Der Impulsvektor des Körpers ist auf die gleiche Weise gerichtet wie der lineare Geschwindigkeitsvektor. Tatsächlich ist aus der Mathematik bekannt, dass die Multiplikation des Vektors a¯ mit der Zahl k zur Bildung eines neuen Vektors b¯ mit folgenden Eigenschaften führt:
- seine Länge ist gleich dem Produkt aus Zahl und Modul des ursprünglichen Vektors, also |b¯| = k * |a¯|;
- wenn k > 0, ist er genauso gerichtet wie der ursprüngliche Vektor, andernfalls ist er entgegengesetzt zu a¯ gerichtet.
In diesem Fall spielt die Geschwindigkeit v¯ die Rolle des Vektors a¯, der Impuls p¯ ist der neue Vektor b¯ und die Zahl k ist die Masse des Körpers m. Da letzterer immer positiv ist (m>0), sollte man bei der Beantwortung der Frage: Welche Richtung hat der Impulsvektor des Körpers p¯ sagen, dass er mit der Geschwindigkeit v¯ gleichgerichtet ist.
Impulsänderungsvektor
Es ist interessant, eine andere ähnliche Frage zu betrachten: Wo ist der Vektor der Impulsänderung des Körpers gerichtet, also Δp¯? Um diese Frage zu beantworten, sollten Sie die oben erhaltene Formel verwenden:
F¯ * Δt = m * Δv¯ = Δp¯.
Basierend auf den Überlegungen im vorherigen Absatz können wir sagen, dass die Richtung der Impulsänderung Δp¯ mit der Richtung des Kraftvektors F¯ (Δt > 0) oder mit der Richtung des Geschwindigkeitsänderungsvektors Δv¯ ( m > 0).
Es ist wichtig, hier nicht zu verwechseln, dass es sich um einen Wertewandel handelt. Im Allgemeinen fallen die Vektoren p¯ und Δp¯ nicht zusammen, da sie in keiner Beziehung zueinander stehen. Wenn beispielsweise die Kraft F¯ gegen die Geschwindigkeit v¯ des Objekts wirkt, sind p¯ und Δp¯ in entgegengesetzte Richtungen gerichtet.
Wo ist es wichtig, die Vektornatur des Impulses zu berücksichtigen?

Die oben diskutierten Fragen: Wohin der Impulsvektor des Körpers und der Vektor seiner Änderung gerichtet sind, sind nicht auf einfache Neugier zurückzuführen. Der Punkt ist, dass das Impulserhaltungsgesetz p¯ für jede seiner Komponenten gilt. Das heißt, in seiner vollständigsten Form ist es wie folgt geschrieben:
p x = m * v x ; p y = m * v y ; p z = m * v z .
Jede Komponente des Vektors p¯ behält ihren Wert im System interagierender Objekte, die nicht von äußeren Kräften beeinflusst werden (Δp¯ = 0).
Wie können dieses Gesetz und Vektordarstellungen von p¯ verwendet werden, um Probleme bei der Wechselwirkung (Kollision) von Körpern zu lösen?
Problem mit zwei Bällen
Die folgende Abbildung zeigt zwei Kugeln unterschiedlicher Masse, die in unterschiedlichen Winkeln zu einer horizontalen Linie fliegen. Die Massen der Kugeln seien m 1 = 1 kg, m 2 = 0,5 kg, ihre Geschwindigkeiten v 1 = 2 m/s, v 2 = 3 m/s. Es ist notwendig, die Richtung des Impulses nach dem Aufprall der Kugeln zu bestimmen, vorausgesetzt, dass diese absolut unelastisch sind.

Um das Problem zu lösen, sollte man das Gesetz der Impulsinvarianz in Vektorform aufschreiben, das heißt:
p 1 ¯ + p 2 ¯ = const.
Da jede Impulskomponente erhalten bleiben muss, muss dieser Ausdruck umgeschrieben werden, wobei auch zu berücksichtigen ist, dass sich die beiden Kugeln nach der Kollision wie ein einziges Objekt zu bewegen beginnen (absolut unelastischer Stoß):
m 1 * v 1x + m 2 * v 2x = (m 1 + m 2) * u x ;
M 1 * v 1y + m 2 * v 2y = (m 1 + m 2) * u y .
Das Minuszeichen für die Projektion des Impulses des ersten Körpers auf die y-Achse erschien aufgrund seiner Richtung gegen den gewählten Vektor der y-Achse (siehe Abb.).
Jetzt müssen wir die unbekannten Komponenten der Geschwindigkeit u ausdrücken und dann die bekannten Werte in die Ausdrücke einsetzen (die entsprechenden Projektionen der Geschwindigkeiten werden durch Multiplikation der Module der Vektoren v 1 ¯ und v 2 ¯ mit trigonometrischen Funktionen bestimmt ):
u x = (m 1 * v 1x + m 2 * v 2x) / (m 1 + m 2), v 1x = v 1 * cos(45 o); v 2x = v 2 * cos(30o);
u x \u003d (1 * 2 * 0,7071 + 0,5 * 3 * 0,866) / (1 + 0,5) \u003d 1,8088 m / s;
u y = (-m 1 * v 1y + m 2 * v 2y) / (m 1 + m 2), v 1y = v 1 * sin(45 o); v 2y = v 2 * sin(30o);
u y = (-1 * 2 * 0,7071 + 0,5 * 3 * 0,5) / (1 + 0,5) = -0,4428 m/s.
Dies sind zwei Komponenten der Geschwindigkeit des Körpers nach dem Aufprall und dem „Anhaften“ der Kugeln. Da die Richtung der Geschwindigkeit mit dem Impulsvektor p¯ zusammenfällt, kann die Frage des Problems beantwortet werden, wenn wir u¯ definieren. Sein Winkel relativ zur horizontalen Achse ist gleich dem Arcustangens des Verhältnisses der Komponenten u y und u x:
α \u003d arctg (-0,4428 / 1,8088) \u003d -13,756 o.
Das Minuszeichen zeigt an, dass der Impuls (Geschwindigkeit) nach dem Aufprall von der x-Achse nach unten gerichtet ist.
Eine Kugel vom Kaliber 22 hat eine Masse von nur 2 g. Wenn jemand eine solche Kugel wirft, kann er sie auch ohne Handschuhe problemlos fangen. Wenn Sie versuchen, eine solche Kugel zu fangen, die mit einer Geschwindigkeit von 300 m/s aus der Mündung geflogen ist, dann helfen hier auch Handschuhe nicht weiter.
Wenn ein Spielzeugwagen auf Sie zurollt, können Sie ihn mit Ihrem Zeh stoppen. Wenn ein Lkw auf Sie zurollt, sollten Sie Ihre Füße nicht im Weg halten.


Betrachten wir ein Problem, das den Zusammenhang zwischen dem Impuls einer Kraft und einer Änderung des Impulses eines Körpers demonstriert.
Beispiel. Die Masse des Balls beträgt 400 g, die Geschwindigkeit, die der Ball nach dem Aufprall erreicht, beträgt 30 m/s. Die Kraft, mit der der Fuß auf den Ball einwirkte, betrug 1500 N, die Aufprallzeit betrug 8 ms. Bestimmen Sie den Kraftimpuls und die Impulsänderung des Körpers für den Ball.

Veränderung des Körperimpulses
Beispiel. Schätzen Sie die durchschnittliche Kraft, die von der Seite des Bodens auf den Ball beim Aufprall einwirkt.
1) Beim Aufprall wirken zwei Kräfte auf den Ball: Stützreaktionskraft, Schwerkraft.

Die Reaktionskraft ändert sich während der Aufprallzeit, sodass die durchschnittliche Bodenreaktionskraft ermittelt werden kann.
2) Impulsänderung  Körper wie im Bild gezeigt
Körper wie im Bild gezeigt

3) Aus Newtons zweitem Gesetz

Das Wichtigste, woran man sich erinnern sollte
1) Formeln für Körperimpuls, Kraftimpuls;
2) Die Richtung des Impulsvektors;
3) Finden Sie die Änderung des Körperimpulses
Allgemeine Ableitung des zweiten Newtonschen Gesetzes

F(t)-Diagramm. variable Kraft
Der Kraftimpuls ist numerisch gleich der Fläche der Figur unter dem Graphen F(t).

Ist die Kraft beispielsweise zeitlich nicht konstant, steigt sie linear an F=kt, dann ist der Impuls dieser Kraft gleich der Fläche des Dreiecks. Sie können diese Kraft durch eine solche konstante Kraft ersetzen, die den Impuls des Körpers im gleichen Zeitraum um den gleichen Betrag ändert.

Durchschnittliche resultierende Kraft
GESETZ DER ERHALTUNG DES MOMENTUMS
Online-Tests
Geschlossenes Körpersystem
Dies ist ein System von Körpern, die nur miteinander interagieren. Es gibt keine äußeren Wechselwirkungskräfte.
In der realen Welt kann ein solches System nicht existieren, es gibt keine Möglichkeit, jegliche externe Interaktion zu beseitigen. Ein geschlossenes Körpersystem ist ein physikalisches Modell, genau wie ein materieller Punkt ein Modell ist. Dies ist ein Modell eines Systems von Körpern, die angeblich nur miteinander interagieren, äußere Kräfte werden nicht berücksichtigt, sie werden vernachlässigt.
Gesetz der Impulserhaltung
In einem geschlossenen Körpersystem Vektor Die Summe der Impulse der Körper ändert sich nicht, wenn die Körper interagieren. Wenn der Impuls eines Körpers zugenommen hat, bedeutet dies, dass in diesem Moment der Impuls eines anderen Körpers (oder mehrerer Körper) um genau den gleichen Betrag abgenommen hat.
Betrachten wir ein solches Beispiel. Mädchen und Junge laufen Schlittschuh. Ein geschlossenes Körpersystem – ein Mädchen und ein Junge (Reibung und andere äußere Kräfte vernachlässigen wir). Das Mädchen steht still, ihr Impuls ist Null, da die Geschwindigkeit Null ist (siehe Formel für den Körperimpuls). Nachdem der Junge, der sich mit einiger Geschwindigkeit bewegt, mit dem Mädchen kollidiert, beginnt auch sie, sich zu bewegen. Jetzt hat ihr Körper Schwung. Der Zahlenwert des Impulses des Mädchens ist genau derselbe wie der Impuls des Jungen, der nach der Kollision abgenommen hat.
Ein Körper mit einer Masse von 20 kg bewegt sich mit einer Geschwindigkeit, der zweite Körper mit einer Masse von 4 kg bewegt sich in die gleiche Richtung mit einer Geschwindigkeit von . Welchen Impuls hat jeder Körper? Welche Dynamik hat das System?


Impuls des Körpersystems ist die Vektorsumme der Impulse aller Körper im System. In unserem Beispiel ist dies die Summe zweier Vektoren (da zwei Körper betrachtet werden), die also in die gleiche Richtung gerichtet sind

Berechnen wir nun den Impuls des Körpersystems aus dem vorherigen Beispiel, wenn sich der zweite Körper in die entgegengesetzte Richtung bewegt.

Da sich die Körper in entgegengesetzte Richtungen bewegen, erhalten wir die Vektorsumme der multidirektionalen Impulse. Mehr zur Summe von Vektoren.
Das Wichtigste, woran man sich erinnern sollte
1) Was ist ein geschlossenes Körpersystem?
2) Impulserhaltungssatz und seine Anwendung
Körperimpuls
Der Impuls eines Körpers ist eine Größe, die dem Produkt aus der Masse des Körpers und seiner Geschwindigkeit entspricht.
Es sollte daran erinnert werden, dass es sich um einen Körper handelt, der als materieller Punkt dargestellt werden kann. Der Impuls eines Körpers ($p$) wird auch Impuls genannt. Das Konzept des Impulses wurde von René Descartes (1596-1650) in die Physik eingeführt. Der Begriff „Impuls“ tauchte später auf (impulsus bedeutet auf Lateinisch „Stoß“). Der Impuls ist eine Vektorgröße (wie die Geschwindigkeit) und wird durch die Formel ausgedrückt:
$p↖(→)=mυ↖(→)$
Die Richtung des Impulsvektors stimmt immer mit der Richtung der Geschwindigkeit überein.
Die Impulseinheit in SI ist der Impuls eines Körpers mit einer Masse von $1$ kg, der sich mit einer Geschwindigkeit von $1$ m/s bewegt, daher ist die Impulseinheit $1$ kg $·$ m/s.
Wirkt auf einen Körper (materieller Punkt) während des Zeitintervalls $∆t$ eine konstante Kraft, dann ist auch die Beschleunigung konstant:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
wobei $(υ_1)↖(→)$ und $(υ_2)↖(→)$ die Anfangs- und Endgeschwindigkeiten des Körpers sind. Wenn wir diesen Wert in den Ausdruck des zweiten Newtonschen Gesetzes einsetzen, erhalten wir:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Wenn wir die Klammern öffnen und den Ausdruck für den Impuls des Körpers verwenden, erhalten wir:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Hier ist $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ die Impulsänderung über die Zeit $∆t$. Dann lautet die vorherige Gleichung:
$∆p↖(→)=F↖(→)∆t$
Der Ausdruck $∆p↖(→)=F↖(→)∆t$ ist eine mathematische Darstellung des zweiten Newtonschen Gesetzes.
Das Produkt einer Kraft und ihrer Dauer nennt man Kraftimpuls. Deshalb Die Impulsänderung eines Punktes ist gleich der Impulsänderung der auf ihn wirkenden Kraft.
Der Ausdruck $∆p↖(→)=F↖(→)∆t$ wird aufgerufen Körperbewegungsgleichung. Es ist zu beachten, dass die gleiche Wirkung – eine Änderung des Impulses eines Punktes – durch eine kleine Kraft in einem langen Zeitraum und durch eine große Kraft in einem kleinen Zeitraum erzielt werden kann.
Impuls des Systems Tel. Gesetz der Impulsänderung
Der Impuls (Impuls) eines mechanischen Systems ist ein Vektor, der der Summe der Impulse aller materiellen Punkte dieses Systems entspricht:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Die Änderungs- und Impulserhaltungsgesetze sind eine Folge des zweiten und dritten Newtonschen Gesetzes.
Betrachten Sie ein System, das aus zwei Körpern besteht. Die Kräfte ($F_(12)$ und $F_(21)$ in der Abbildung, mit denen die Körper des Systems miteinander interagieren, werden als intern bezeichnet.
Lassen Sie zusätzlich zu den inneren Kräften auch äußere Kräfte $(F_1)↖(→)$ und $(F_2)↖(→)$ auf das System wirken. Für jeden Körper kann die Gleichung $∆p↖(→)=F↖(→)∆t$ geschrieben werden. Wenn wir den linken und rechten Teil dieser Gleichungen addieren, erhalten wir:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Nach Newtons drittem Gesetz $(F_(12))↖(→)=-(F_(21))↖(→)$.
Somit,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
Auf der linken Seite ist die geometrische Summe der Impulsänderungen aller Körper des Systems, gleich der Impulsänderung des Systems selbst – $(∆p_(syst))↖(→)$. Damit Im Hinterkopf kann die Gleichheit $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ geschrieben werden:
$(∆p_(sys))↖(→)=F↖(→)∆t$
wobei $F↖(→)$ die Summe aller auf den Körper wirkenden äußeren Kräfte ist. Das erhaltene Ergebnis bedeutet, dass nur äußere Kräfte den Impuls des Systems ändern können und die Änderung des Impulses des Systems auf die gleiche Weise gerichtet ist wie die gesamte äußere Kraft. Dies ist die Essenz des Gesetzes der Impulsänderung eines mechanischen Systems.
Innere Kräfte können den Gesamtimpuls des Systems nicht verändern. Sie verändern lediglich die Impulse der einzelnen Körper des Systems.
Gesetz der Impulserhaltung
Aus der Gleichung $(∆p_(syst))↖(→)=F↖(→)∆t$ folgt das Impulserhaltungsgesetz. Wirken keine äußeren Kräfte auf das System, dann verschwindet die rechte Seite der Gleichung $(∆p_(sys))↖(→)=F↖(→)∆t$, was bedeutet, dass der Gesamtimpuls des Systems unverändert bleibt :
$(∆p_(sys))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Ein System, auf das keine äußeren Kräfte einwirken oder die Resultierende äußerer Kräfte gleich Null ist, heißt geschlossen.
Der Impulserhaltungssatz besagt:
Der Gesamtimpuls eines geschlossenen Systems von Körpern bleibt bei jeder Wechselwirkung der Körper des Systems untereinander konstant.
Das erhaltene Ergebnis gilt für ein System, das eine beliebige Anzahl von Körpern enthält. Wenn die Summe der äußeren Kräfte ungleich Null ist, die Summe ihrer Projektionen in eine Richtung jedoch gleich Null ist, ändert sich die Projektion des Impulses des Systems in diese Richtung nicht. So kann beispielsweise ein Körpersystem auf der Erdoberfläche aufgrund der auf alle Körper wirkenden Schwerkraft nicht als geschlossen betrachtet werden, die Summe der Impulsprojektionen in horizontaler Richtung kann jedoch unverändert bleiben (in Abwesenheit). der Reibung), da in dieser Richtung die Schwerkraft keine Wirkung hat.
Strahlantrieb
Betrachten Sie Beispiele, die die Gültigkeit des Impulserhaltungssatzes bestätigen.
Nehmen wir einen Kinder-Gummiballon, blasen ihn auf und lassen ihn los. Wir werden sehen, dass der Ballon selbst in die andere Richtung fliegt, wenn die Luft in eine Richtung austritt. Die Bewegung des Balls ist ein Beispiel für den Strahlantrieb. Es wird durch den Impulserhaltungssatz erklärt: Der Gesamtimpuls des Systems „Kugel plus Luft darin“ vor dem Ausströmen der Luft ist Null; er muss während der Bewegung gleich Null bleiben; Daher bewegt sich der Ball entgegen der Ausströmrichtung des Strahls und mit einer solchen Geschwindigkeit, dass sein Impuls im Absolutwert dem Impuls des Luftstrahls entspricht.
Strahlantrieb bezeichnet die Bewegung eines Körpers, die auftritt, wenn sich ein Teil davon mit einer bestimmten Geschwindigkeit von ihm trennt. Aufgrund des Impulserhaltungssatzes ist die Bewegungsrichtung des Körpers entgegengesetzt zur Bewegungsrichtung des abgetrennten Teils.
Raketenflüge basieren auf dem Prinzip des Strahlantriebs. Eine moderne Weltraumrakete ist ein sehr komplexes Flugzeug. Die Masse der Rakete ist die Summe der Masse des Arbeitsmediums (d. h. heißer Gase, die bei der Verbrennung von Treibstoff entstehen und in Form eines Strahlstroms ausgestoßen werden) und der endgültigen oder, wie man sagt, „trockenen“ Masse der Rakete, der nach dem Ausstoß des Arbeitsmediums aus der Rakete verbleibt.
Wenn ein reaktiver Gasstrahl mit hoher Geschwindigkeit aus einer Rakete ausgestoßen wird, rast die Rakete selbst in die entgegengesetzte Richtung. Nach dem Impulserhaltungssatz muss der von der Rakete aufgenommene Impuls $m_(p)υ_p$ gleich dem Impuls $m_(gas) υ_(gas)$ der ausgestoßenen Gase sein:
$m_(p)υ_p=m_(gas) υ_(gas)$
Daraus folgt die Geschwindigkeit der Rakete
$υ_p=((m_(gas))/(m_p)) υ_(gas)$
Aus dieser Formel ist ersichtlich, dass je größer die Geschwindigkeit der Rakete ist, desto größer ist die Geschwindigkeit der ausgestoßenen Gase und das Verhältnis der Masse des Arbeitsmediums (d. h. der Masse des Treibstoffs) zur endgültigen („trockenen“) Masse. Masse der Rakete.
Die Formel $υ_p=((m_(gas))/(m_p))·υ_(gas)$ ist ungefähr. Es berücksichtigt nicht, dass die Masse der fliegenden Rakete mit der Verbrennung des Treibstoffs immer kleiner wird. Die genaue Formel für die Geschwindigkeit einer Rakete wurde 1897 von K. E. Tsiolkovsky ermittelt und trägt seinen Namen.
Zwangsarbeit
Der Begriff „Arbeit“ wurde 1826 vom französischen Wissenschaftler J. Poncelet in die Physik eingeführt. Wenn im Alltag nur menschliche Arbeit als Arbeit bezeichnet wird, so ist es in der Physik und insbesondere in der Mechanik allgemein anerkannt, dass Arbeit durch Gewalt verrichtet wird. Die physische Arbeitsmenge wird üblicherweise mit dem Buchstaben $A$ bezeichnet.
Zwangsarbeit- Dies ist ein Maß für die Wirkung einer Kraft, abhängig von ihrem Modul und ihrer Richtung, sowie von der Verschiebung des Angriffspunktes der Kraft. Bei konstanter Kraft und geradliniger Bewegung wird die Arbeit durch die Gleichheit bestimmt:
$A=F|∆r↖(→)|cosα$
Dabei ist $F$ die auf den Körper wirkende Kraft, $∆r↖(→)$ die Verschiebung, $α$ der Winkel zwischen der Kraft und der Verschiebung.

Die Arbeit der Kraft ist gleich dem Produkt der Module Kraft und Weg und dem Kosinus des Winkels zwischen ihnen, also dem Skalarprodukt der Vektoren $F↖(→)$ und $∆r↖(→)$.
Arbeit ist eine skalare Größe. Wenn $α 0$ und wenn $90°
Wenn mehrere Kräfte auf einen Körper einwirken, ist die Gesamtarbeit (die Summe der Arbeit aller Kräfte) gleich der Arbeit der resultierenden Kraft.
Die SI-Arbeitseinheit ist Joule($1$J). $1$ J ist die Arbeit, die eine Kraft von $1$ N auf einem Weg von $1$ m in Richtung dieser Kraft verrichtet. Diese Einheit ist nach dem englischen Wissenschaftler J. Joule (1818-1889) benannt: $1$ J = $1$ N $·$ m. Oft werden auch Kilojoule und Millijoule verwendet: $1$ kJ $= 1.000$ J, $1$ mJ $ = 0,001$ J.
Die Arbeit der Schwerkraft
Betrachten wir einen Körper, der entlang einer schiefen Ebene mit einem Neigungswinkel $α$ und einer Höhe $H$ gleitet.

Wir drücken $∆x$ durch $H$ und $α$ aus:
$∆x=(H)/(sinα)$
Wenn man bedenkt, dass die Schwerkraft $F_т=mg$ einen Winkel ($90° - α$) mit der Bewegungsrichtung bildet, erhalten wir mit der Formel $∆x=(H)/(sin)α$ einen Ausdruck für die Arbeit der Schwerkraft $A_g$:
$A_g=mg cos(90°-α)(H)/(sinα)=mgH$
Aus dieser Formel ist ersichtlich, dass die Schwerkraftarbeit von der Höhe und nicht vom Neigungswinkel der Ebene abhängt.
Daraus folgt:
- die Arbeit der Schwerkraft hängt nicht von der Form der Flugbahn ab, entlang der sich der Körper bewegt, sondern nur von der Anfangs- und Endposition des Körpers;
- Wenn sich ein Körper entlang einer geschlossenen Flugbahn bewegt, ist die Schwerkraftarbeit Null, d. h. die Schwerkraft ist eine konservative Kraft (konservative Kräfte sind Kräfte, die diese Eigenschaft haben).
Die Arbeit der Reaktionskräfte, ist Null, weil die Reaktionskraft ($N$) senkrecht zur Verschiebung $∆x$ gerichtet ist.
Die Arbeit der Reibungskraft
Die Reibungskraft ist der Verschiebung $∆x$ entgegengesetzt und bildet mit dieser einen Winkel $180°$, daher ist die Arbeit der Reibungskraft negativ:
$A_(tr)=F_(tr)∆x cos180°=-F_(tr) ∆x$
Da $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ dann
$A_(tr)=μmgHctgα$
Die Arbeit der elastischen Kraft
Lassen Sie eine äußere Kraft $F↖(→)$ auf eine ungedehnte Feder der Länge $l_0$ wirken und sie um $∆l_0=x_0$ dehnen. In Position $x=x_0F_(control)=kx_0$. Nach Beendigung der Kraft $F↖(→)$ am Punkt $x_0$ wird die Feder unter der Wirkung der Kraft $F_(Steuerung)$ zusammengedrückt.

Bestimmen wir die Arbeit der elastischen Kraft, wenn sich die Koordinate des rechten Endes der Feder von $х_0$ auf $х$ ändert. Da sich die elastische Kraft in diesem Bereich linear ändert, kann im Hookeschen Gesetz ihr Durchschnittswert in diesem Bereich verwendet werden:
$F_(ex.av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Dann ist die Arbeit (unter Berücksichtigung der Tatsache, dass die Richtungen $(F_(exp.av.))↖(→)$ und $(∆x)↖(→)$ zusammenfallen) gleich:
$A_(exerc)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Es kann gezeigt werden, dass die Form der letzten Formel nicht vom Winkel zwischen $(F_(exp.av.))↖(→)$ und $(∆x)↖(→)$ abhängt. Die Arbeit der elastischen Kräfte hängt nur von den Verformungen der Feder im Anfangs- und Endzustand ab.
Somit ist die elastische Kraft wie die Schwerkraft eine konservative Kraft.
Macht der Gewalt
Leistung ist eine physikalische Größe, die durch das Verhältnis von Arbeit zur Zeitspanne, in der sie erzeugt wird, gemessen wird.
Mit anderen Worten: Die Leistung gibt an, wie viel Arbeit pro Zeiteinheit geleistet wird (in SI, für $1$ s).
Die Leistung wird durch die Formel bestimmt:
wobei $N$ die Leistung und $A$ die in der Zeit $∆t$ geleistete Arbeit ist.
Wenn wir in der Formel $N=(A)/(∆t)$ anstelle der Arbeit $A$ den Ausdruck $A=F|(∆r)↖(→)|cosα$ einsetzen, erhalten wir:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Die Leistung ist gleich dem Produkt der Module der Kraft- und Geschwindigkeitsvektoren und dem Kosinus des Winkels zwischen diesen Vektoren.
Die Leistung im SI-System wird in Watt (W) gemessen. Ein Watt ($1$ W) ist die Leistung, bei der $1$ J Arbeit in $1$ s verrichtet wird: $1$ W $= 1$ J/s.
Diese Einheit ist nach dem englischen Erfinder J. Watt (Watt) benannt, der die erste Dampfmaschine baute. J. Watt selbst (1736-1819) verwendete eine andere Leistungseinheit – Pferdestärke (PS), die er einführte, um die Leistung einer Dampfmaschine und eines Pferdes vergleichen zu können: $ 1 $ hp. $= 735,5$ Di.
In der Technik werden oft größere Leistungseinheiten verwendet – Kilowatt und Megawatt: $1$ kW = 1000$ W, $1$ MW $= 1000000$ W.
Kinetische Energie. Gesetz der Änderung der kinetischen Energie
Wenn ein Körper oder mehrere interagierende Körper (ein System von Körpern) Arbeit verrichten können, dann sagt man, dass sie Energie haben.
Das Wort „Energie“ (aus dem Griechischen. energia – Aktion, Aktivität) wird im Alltag häufig verwendet. So nennt man beispielsweise Menschen, die schnell arbeiten können, energisch, also Menschen mit großer Energie.
Die Energie, die ein Körper aufgrund seiner Bewegung besitzt, wird kinetische Energie genannt.
Wie bei der Definition von Energie im Allgemeinen können wir auch von der kinetischen Energie sagen, dass kinetische Energie die Fähigkeit eines sich bewegenden Körpers ist, Arbeit zu verrichten.
Finden wir die kinetische Energie eines Körpers mit der Masse $m$, der sich mit einer Geschwindigkeit von $υ$ bewegt. Da es sich bei der kinetischen Energie um die Bewegungsenergie handelt, ist der Nullzustand für sie der Ruhezustand des Körpers. Nachdem wir die Arbeit gefunden haben, die erforderlich ist, um dem Körper eine bestimmte Geschwindigkeit zu vermitteln, werden wir seine kinetische Energie ermitteln.
Dazu berechnen wir die auf dem Verschiebungsabschnitt $∆r↖(→)$ verrichtete Arbeit, wenn die Richtungen der Kraftvektoren $F↖(→)$ und der Verschiebung $∆r↖(→)$ übereinstimmen. In diesem Fall ist die Arbeit
wobei $∆x=∆r$

Für die Bewegung eines Punktes mit der Beschleunigung $α=const$ hat der Ausdruck für die Bewegung die Form:
$∆x=υ_1t+(at^2)/(2),$
wobei $υ_1$ die Anfangsgeschwindigkeit ist.
Wenn wir den Ausdruck für $∆x$ aus $∆x=υ_1t+(at^2)/(2)$ in die Gleichung $A=F ∆x$ einsetzen und Newtons zweites Gesetz $F=ma$ verwenden, erhalten wir:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Ausdrücken der Beschleunigung als Anfangsgeschwindigkeit $υ_1$ und Endgeschwindigkeit $υ_2$ $a=(υ_2-υ_1)/(t)$ und Einsetzen in $A=ma(υ_1t+(at^2)/(2))=( mat)/ (2)(2υ_1+at)$ haben wir:
$A=(m(υ_2-υ_1))/(2) (2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Wenn wir nun die Anfangsgeschwindigkeit mit Null gleichsetzen: $υ_1=0$, erhalten wir einen Ausdruck für kinetische Energie:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Somit verfügt ein bewegter Körper über kinetische Energie. Diese Energie entspricht der Arbeit, die geleistet werden muss, um die Geschwindigkeit des Körpers von Null auf $υ$ zu erhöhen.
Aus $E_K=(mυ)/(2)=(p^2)/(2m)$ folgt, dass die Arbeit einer Kraft, um einen Körper von einer Position in eine andere zu bewegen, gleich der Änderung der kinetischen Energie ist:
$A=E_(K_2)-E_(K_1)=∆E_K$
Die Gleichung $A=E_(K_2)-E_(K_1)=∆E_K$ drückt aus Satz über die Änderung der kinetischen Energie.
Änderung der kinetischen Energie des Körpers(materieller Punkt) für einen bestimmten Zeitraum ist gleich der Arbeit, die während dieser Zeit von der auf den Körper einwirkenden Kraft geleistet wird.
Potenzielle Energie
Potenzielle Energie ist die Energie, die durch die gegenseitige Anordnung interagierender Körper oder Teile desselben Körpers bestimmt wird.
Da Energie als die Fähigkeit eines Körpers definiert ist, Arbeit zu verrichten, wird potentielle Energie natürlich als die Arbeit einer Kraft definiert, die nur von der relativen Position der Körper abhängt. Dies ist die Arbeit der Schwerkraft $A=mgh_1-mgh_2=mgH$ und die Arbeit der Elastizität:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Die potentielle Energie des Körpers Die Wechselwirkung mit der Erde wird als Wert bezeichnet, der dem Produkt der Masse $m$ dieses Körpers und der freien Fallbeschleunigung $g$ sowie der Höhe $h$ des Körpers über der Erdoberfläche entspricht:
Die potentielle Energie eines elastisch verformten Körpers ist der Wert, der der Hälfte des Produkts aus dem Elastizitätskoeffizienten (Steifigkeit) $k$ des Körpers und dem Quadrat der Verformung $∆l$ entspricht:
$E_p=(1)/(2)k∆l^2$
Die Arbeit konservativer Kräfte (Schwerkraft und Elastizität) wird unter Berücksichtigung von $E_p=mgh$ und $E_p=(1)/(2)k∆l^2$ wie folgt ausgedrückt:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Mit dieser Formel können wir eine allgemeine Definition der potentiellen Energie geben.
Die potentielle Energie eines Systems ist ein von der Position der Körper abhängiger Wert, dessen Änderung beim Übergang des Systems vom Anfangszustand in den Endzustand gleich der Arbeit der inneren konservativen Kräfte des Systems ist. mit umgekehrtem Vorzeichen genommen.
Das Minuszeichen auf der rechten Seite der Gleichung $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ bedeutet, dass, wenn Arbeit durch innere Kräfte verrichtet wird ( (Beispiel: Fällt ein Körper unter der Wirkung der Schwerkraft im System „Stein-Erde“ auf den Boden), nimmt die Energie des Systems ab. Arbeit und Änderung der potentiellen Energie in einem System haben immer entgegengesetzte Vorzeichen.
Da die Arbeit nur die Änderung der potentiellen Energie bestimmt, hat in der Mechanik nur die Änderung der Energie physikalische Bedeutung. Daher ist die Wahl des Nullenergieniveaus willkürlich und wird ausschließlich durch Zweckmäßigkeitserwägungen bestimmt, beispielsweise durch die Einfachheit, die entsprechenden Gleichungen zu schreiben.
Das Gesetz der Änderung und Erhaltung mechanischer Energie
Gesamte mechanische Energie des Systems die Summe seiner kinetischen und potentiellen Energien heißt:
Sie wird durch die Position der Körper (potenzielle Energie) und ihre Geschwindigkeit (kinetische Energie) bestimmt.
Nach dem Satz der kinetischen Energie gilt
$E_k-E_(k_1)=A_p+A_(pr),$
wobei $А_ð$ die Arbeit potentieller Kräfte ist, $А_(pr)$ die Arbeit nichtpotentieller Kräfte.
Die Arbeit potentieller Kräfte wiederum ist gleich der Differenz der potentiellen Energie des Körpers im Anfangszustand $E_(p_1)$ und im Endzustand $E_p$. Vor diesem Hintergrund erhalten wir einen Ausdruck für das Gesetz der Änderung der mechanischen Energie:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
wobei die linke Seite der Gleichheit die Änderung der gesamten mechanischen Energie und die rechte Seite die Arbeit nichtpotentieller Kräfte ist.
Also, Gesetz der Änderung der mechanischen Energie lautet:
Die Änderung der mechanischen Energie des Systems ist gleich der Arbeit aller nichtpotentialen Kräfte.
Ein mechanisches System, in dem nur potentielle Kräfte wirken, wird als konservativ bezeichnet.
In einem konservativen System ist $A_(pr) = 0$. das impliziert Gesetz zur Erhaltung der mechanischen Energie:
In einem geschlossenen konservativen System bleibt die gesamte mechanische Energie erhalten (ändert sich nicht mit der Zeit):
$E_k+E_p=E_(k_1)+E_(p_1)$
Das Gesetz zur Erhaltung der mechanischen Energie leitet sich aus den Gesetzen der Newtonschen Mechanik ab, die auf ein System materieller Punkte (oder Makroteilchen) anwendbar sind.
Allerdings gilt das Gesetz der Erhaltung der mechanischen Energie auch für ein System von Mikropartikeln, bei dem die Newtonschen Gesetze selbst keine Anwendung mehr finden.
Der Erhaltungssatz der mechanischen Energie ist eine Folge der Homogenität der Zeit.
Einheitlichkeit der Zeit ist, dass der Ablauf physikalischer Prozesse unter gleichen Anfangsbedingungen nicht vom Zeitpunkt der Entstehung dieser Bedingungen abhängt.
Der Erhaltungssatz der gesamten mechanischen Energie besagt, dass sich bei einer Änderung der kinetischen Energie in einem konservativen System auch dessen potentielle Energie ändern muss, damit ihre Summe konstant bleibt. Damit ist die Möglichkeit gemeint, eine Energieart in eine andere umzuwandeln.
Entsprechend den verschiedenen Bewegungsformen der Materie werden verschiedene Arten von Energie berücksichtigt: mechanische, innere (gleich der Summe der kinetischen Energie der chaotischen Bewegung von Molekülen relativ zum Massenschwerpunkt des Körpers und der potentiellen Energie von die Wechselwirkung von Molekülen untereinander), elektromagnetische, chemische (die aus der kinetischen Energie der Bewegung von Elektronen und der elektrischen Energie ihrer Wechselwirkung untereinander und mit Atomkernen besteht), Kernenergie usw. Daraus ist ersichtlich Das Vorstehende weist darauf hin, dass die Aufteilung der Energie in verschiedene Arten eher willkürlich ist.
Naturphänomene gehen meist mit der Umwandlung einer Energieart in eine andere einher. So führt beispielsweise die Reibung von Teilen verschiedener Mechanismen zur Umwandlung mechanischer Energie in Wärme, also in innere Energie. Bei Wärmekraftmaschinen hingegen wird innere Energie in mechanische Energie umgewandelt; In galvanischen Zellen wird chemische Energie in elektrische Energie usw. umgewandelt.
Derzeit ist der Energiebegriff einer der Grundbegriffe der Physik. Dieses Konzept ist untrennbar mit der Idee der Umwandlung einer Bewegungsform in eine andere verbunden.
So wird der Energiebegriff in der modernen Physik formuliert:
Energie ist ein allgemeines quantitatives Maß für die Bewegung und Wechselwirkung aller Arten von Materie. Energie entsteht nicht aus dem Nichts und verschwindet nicht, sie kann nur von einer Form in eine andere übergehen. Der Energiebegriff verbindet alle Phänomene der Natur.
einfache Mechanismen. Effizienz des Mechanismus
Einfache Mechanismen sind Geräte, die die Größe oder Richtung der auf den Körper ausgeübten Kräfte ändern.
Sie dienen dazu, große Lasten mit geringem Kraftaufwand zu bewegen oder zu heben. Dazu gehören der Hebel und seine Varianten – Blöcke (beweglich und fest), das Tor, die schiefe Ebene und ihre Varianten – der Keil, die Schraube usw.
Hebelarm. Hebelregel
Der Hebel ist ein starrer Körper, der sich um eine feste Halterung drehen kann.

Die Leverage-Regel besagt:
Ein Hebel befindet sich im Gleichgewicht, wenn die auf ihn ausgeübten Kräfte umgekehrt proportional zu seinen Hebelarmen sind:
$(F_2)/(F_1)=(l_1)/(l_2)$
Aus der Formel $(F_2)/(F_1)=(l_1)/(l_2)$, indem wir die Proportionalitätseigenschaft darauf anwenden (das Produkt der Extremterme der Proportion ist gleich dem Produkt ihrer Mittelterme), erhalten wir kann die folgende Formel erhalten:
Aber $F_1l_1=M_1$ ist das Kraftmoment, das dazu neigt, den Hebel im Uhrzeigersinn zu drehen, und $F_2l_2=M_2$ ist das Kraftmoment, das dazu neigt, den Hebel gegen den Uhrzeigersinn zu drehen. Somit gilt $M_1=M_2$, was bewiesen werden sollte.
Der Hebel wurde bereits in der Antike von Menschen genutzt. Mit seiner Hilfe war es beim Bau der Pyramiden im alten Ägypten möglich, schwere Steinplatten zu heben. Ohne Hebelwirkung wäre dies nicht möglich gewesen. Tatsächlich wurden zum Beispiel für den Bau der Cheops-Pyramide, die eine Höhe von 147 $ m hat, mehr als zwei Millionen Steinblöcke verwendet, von denen der kleinste eine Masse von 2,5 $ Tonnen hatte!
Heutzutage werden Hebel sowohl in der Produktion (z. B. Kräne) als auch im Alltag (Scheren, Drahtschneider, Waagen) häufig verwendet.
Fester Block
Die Wirkung eines festen Blocks ähnelt der Wirkung eines Hebels mit gleicher Hebelwirkung: $l_1=l_2=r$. Die ausgeübte Kraft $F_1$ ist gleich der Last $F_2$ und die Gleichgewichtsbedingung ist:
Fester Block Wird verwendet, wenn Sie die Richtung einer Kraft ändern müssen, ohne ihre Größe zu ändern.
Beweglicher Block
Der bewegliche Block wirkt ähnlich wie ein Hebel, dessen Arme sind: $l_2=(l_1)/(2)=r$. In diesem Fall hat die Gleichgewichtsbedingung die Form:
wobei $F_1$ die ausgeübte Kraft und $F_2$ die Last ist. Die Verwendung eines beweglichen Blocks führt zu einem doppelten Kraftgewinn.
Polyspast (Blocksystem)

Ein gewöhnlicher Kettenzug besteht aus $n$ beweglichen und $n$ festen Blöcken. Wenn man es anwendet, erhält man einen Stärkegewinn um das 2n$-fache:
$F_1=(F_2)/(2n)$
Elektrokettenzug besteht aus n beweglichen und einem festen Block. Der Einsatz eines Kraftkettenzuges führt zu einem 2^n$-fachen Kraftgewinn:
$F_1=(F_2)/(2^n)$

Schrauben
Die Schraube ist eine um die Achse gewickelte schiefe Ebene.
Die Bedingung für das Gleichgewicht der auf die Schraube wirkenden Kräfte hat die Form:
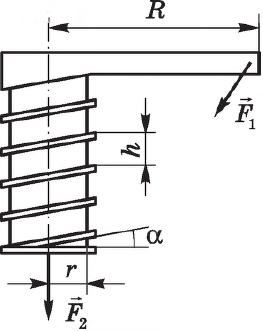
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

wobei $F_1$ eine äußere Kraft ist, die auf die Schraube wirkt und in einem Abstand $R$ von ihrer Achse wirkt; $F_2$ ist die Kraft, die in Richtung der Schraubenachse wirkt; $h$ - Schraubensteigung; $r$ ist der durchschnittliche Gewinderadius; $α$ ist der Winkel des Gewindes. $R$ ist die Länge des Hebels (Schraubenschlüssels), der die Schraube mit der Kraft $F_1$ dreht.
Effizienz
Leistungskoeffizient (COP) – das Verhältnis der nützlichen Arbeit zur gesamten aufgewendeten Arbeit.
Effizienz wird oft in Prozent ausgedrückt und mit dem griechischen Buchstaben $η$ („dies“) bezeichnet:
$η=(A_p)/(A_3) 100%$
Dabei ist $A_n$ die nützliche Arbeit und $A_3$ die gesamte aufgewendete Arbeit.
Nützliche Arbeit ist immer nur ein Teil der Gesamtarbeit, die eine Person mit diesem oder jenem Mechanismus aufwendet.
Ein Teil der geleisteten Arbeit wird für die Überwindung der Reibungskräfte aufgewendet. Da $А_3 > А_п$ ist, ist die Effizienz immer kleiner als $1$ (oder $< 100%$).
Da jede der Arbeiten in dieser Gleichung als Produkt der entsprechenden Kraft und der zurückgelegten Strecke ausgedrückt werden kann, kann sie wie folgt umgeschrieben werden: $F_1s_1≈F_2s_2$.
Daraus folgt, dass Wenn wir mit Hilfe des Mechanismus gewinnen, verlieren wir auf dem Weg genauso oft und umgekehrt. Dieses Gesetz wird die goldene Regel der Mechanik genannt.
Die goldene Regel der Mechanik ist ein Näherungsgesetz, da sie die Arbeit zur Überwindung von Reibung und Schwerkraft der Teile der verwendeten Geräte nicht berücksichtigt. Dennoch kann es bei der Analyse der Funktionsweise eines einfachen Mechanismus sehr nützlich sein.

Dank dieser Regel können wir beispielsweise sofort sagen, dass der in der Abbildung gezeigte Arbeiter bei einer doppelten Erhöhung der Hubkraft um 10 $ cm das gegenüberliegende Ende des Hebels um 20 $ absenken muss cm.
Kollision von Körpern. Elastische und unelastische Stöße
Um das Problem der Bewegung von Körpern nach einer Kollision zu lösen, werden die Gesetze der Impuls- und mechanischen Energieerhaltung genutzt: Aus den vor der Kollision bekannten Impulsen und Energien werden die Werte dieser Größen nach der Kollision bestimmt. Betrachten Sie die Fälle elastischer und unelastischer Stöße.
Man spricht von einem absolut unelastischen Stoß, nach dem die Körper einen einzigen Körper bilden, der sich mit einer bestimmten Geschwindigkeit bewegt. Das Problem der Geschwindigkeit des letzteren wird mithilfe des Impulserhaltungssatzes für ein System von Körpern mit den Massen $m_1$ und $m_2$ (wenn es sich um zwei Körper handelt) vor und nach dem Aufprall gelöst:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Offensichtlich bleibt die kinetische Energie von Körpern während eines inelastischen Stoßes nicht erhalten (zum Beispiel wird sie bei $(υ_1)↖(→)=-(υ_2)↖(→)$ und $m_1=m_2$ danach gleich Null Auswirkungen).
Man spricht von einem absolut elastischen Stoß, bei dem nicht nur die Summe der Impulse, sondern auch die Summe der kinetischen Energien der kollidierenden Körper erhalten bleibt.
Für einen absolut elastischen Stoß gelten die Gleichungen
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2 )^2)/(2)$
Dabei sind $m_1, m_2$ die Massen der Kugeln, $υ_1, υ_2$ die Geschwindigkeiten der Kugeln vor dem Aufprall, $υ"_1, υ"_2$ die Geschwindigkeiten der Kugeln nach dem Aufprall.
Nachdem wir die Newtonschen Gesetze studiert haben, sehen wir, dass es mit ihrer Hilfe möglich ist, die Hauptprobleme der Mechanik zu lösen, wenn wir alle auf den Körper wirkenden Kräfte kennen. Es gibt Situationen, in denen es schwierig oder sogar unmöglich ist, diese Größen zu bestimmen. Betrachten wir mehrere solcher Situationen.Wenn zwei Billardkugeln oder Autos kollidieren, können wir über die wirkenden Kräfte sagen, dass dies in ihrer Natur liegt, hier wirken elastische Kräfte. Wir werden jedoch weder ihre Module noch ihre Richtungen genau bestimmen können, zumal diese Kräfte eine äußerst kurze Wirkungsdauer haben.Auch bei der Bewegung von Raketen und Düsenflugzeugen können wir wenig über die Kräfte sagen, die diese Körper in Bewegung setzen.In solchen Fällen werden Methoden verwendet, die es ermöglichen, die Lösung der Bewegungsgleichungen zu vermeiden und die Konsequenzen dieser Gleichungen sofort zu nutzen. Gleichzeitig werden neue physikalische Größen eingeführt. Betrachten Sie eine dieser Größen, den sogenannten Impuls des Körpers
Ein Pfeil, der von einem Bogen abgefeuert wurde. Je länger der Kontakt der Bogensehne mit dem Pfeil (∆t) ist, desto größer ist die Impulsänderung des Pfeils (∆) und desto höher ist daher seine Endgeschwindigkeit.
Zwei kollidierende Bälle. Während sich die Kugeln berühren, wirken sie mit gleichen Kräften aufeinander, wie uns das dritte Newtonsche Gesetz lehrt. Das bedeutet, dass die Änderungen ihrer Impulse auch dann betragsmäßig gleich sein müssen, wenn die Massen der Kugeln nicht gleich sind.
Nach der Analyse der Formeln können zwei wichtige Schlussfolgerungen gezogen werden:
1. Die gleichen Kräfte, die über den gleichen Zeitraum wirken, bewirken bei verschiedenen Körpern die gleichen Impulsänderungen, unabhängig von deren Masse.
2. Die gleiche Änderung des Impulses eines Körpers kann entweder durch Einwirkung einer kleinen Kraft über einen längeren Zeitraum oder durch Einwirkung einer großen Kraft für kurze Zeit auf denselben Körper erreicht werden.
Nach dem zweiten Newtonschen Gesetz können wir schreiben:
∆t = ∆ = ∆ / ∆t
Das Verhältnis der Impulsänderung des Körpers zur Zeitspanne, in der diese Änderung auftrat, ist gleich der Summe der auf den Körper wirkenden Kräfte.
Nach der Analyse dieser Gleichung sehen wir, dass das zweite Newtonsche Gesetz es uns ermöglicht, die Klasse der zu lösenden Probleme zu erweitern und Probleme einzubeziehen, bei denen sich die Masse von Körpern im Laufe der Zeit ändert.
Wenn wir versuchen, Probleme mit einer variablen Masse von Körpern zu lösen, verwenden wir die übliche Formulierung des zweiten Newtonschen Gesetzes:
Dann würde der Versuch einer solchen Lösung zu einem Fehler führen.
Ein Beispiel hierfür sind die bereits erwähnten Düsenflugzeuge oder Weltraumraketen, die bei ihrer Bewegung Treibstoff verbrennen und die Produkte dieses verbrannten Materials in den umgebenden Raum geschleudert werden. Natürlich nimmt die Masse eines Flugzeugs oder einer Rakete mit dem Treibstoffverbrauch ab.
Trotz der Tatsache, dass das zweite Newtonsche Gesetz in der Form „Die resultierende Kraft ist gleich dem Produkt aus der Masse des Körpers und seiner Beschleunigung“ die Lösung einer ziemlich breiten Klasse von Problemen ermöglicht, gibt es Fälle von Körperbewegungen, die durch diese Gleichung nicht vollständig beschrieben werden können . In solchen Fällen ist es notwendig, eine andere Formulierung des zweiten Hauptsatzes anzuwenden, die die Änderung des Impulses des Körpers mit dem Impuls der resultierenden Kraft in Beziehung setzt. Darüber hinaus gibt es eine Reihe von Problemen, bei denen die Lösung der Bewegungsgleichungen mathematisch äußerst schwierig oder sogar unmöglich ist. In solchen Fällen ist es sinnvoll, das Konzept des Impulses zu verwenden.
Mithilfe des Impulserhaltungssatzes und der Beziehung zwischen dem Impuls einer Kraft und dem Impuls eines Körpers können wir Newtons zweites und drittes Gesetz ableiten.
Das zweite Newtonsche Gesetz leitet sich aus dem Verhältnis des Impulses der Kraft zum Impuls des Körpers ab.
Der Kraftimpuls ist gleich der Impulsänderung des Körpers:

Nachdem wir die entsprechenden Übertragungen durchgeführt haben, erhalten wir die Abhängigkeit der Kraft von der Beschleunigung, denn Beschleunigung ist definiert als das Verhältnis der Geschwindigkeitsänderung zur Zeit, in der diese Änderung stattgefunden hat:

Wenn wir die Werte in unsere Formel einsetzen, erhalten wir die Formel für das zweite Newtonsche Gesetz:
![]()
Um das dritte Newtonsche Gesetz abzuleiten, benötigen wir den Impulserhaltungssatz.
Vektoren betonen die vektorielle Natur der Geschwindigkeit, also die Tatsache, dass die Geschwindigkeit ihre Richtung ändern kann. Nach Transformationen erhalten wir:

Da das Zeitintervall in einem geschlossenen System für beide Körper ein konstanter Wert war, können wir schreiben:

Wir haben das dritte Newtonsche Gesetz erhalten: Zwei Körper interagieren miteinander mit Kräften gleicher Größe und entgegengesetzter Richtung. Die Vektoren dieser Kräfte sind aufeinander zu gerichtet bzw. die Module dieser Kräfte sind in ihrem Wert gleich.
Referenzliste
- Tikhomirova S.A., Yavorsky B.M. Physik (Grundniveau) - M.: Mnemozina, 2012.
- Gendenstein L.E., Dick Yu.I. Physik Klasse 10. - M.: Mnemosyne, 2014.
- Kikoin I.K., Kikoin A.K. Physik - 9, Moskau, Bildung, 1990.
Hausaufgaben
- Definieren Sie den Impuls eines Körpers, den Impuls einer Kraft.
- Wie hängt der Impuls eines Körpers mit dem Impuls einer Kraft zusammen?
- Welche Schlussfolgerungen lassen sich aus den Formeln für den Impuls des Körpers und den Impuls der Kraft ziehen?
- Internetportal Questions-physics.ru ().
- Internetportal Frutmrut.ru ().
- Internetportal Fizmat.by ().
Newtons Gesetze ermöglichen die Lösung verschiedener praktisch wichtiger Probleme der Wechselwirkung und Bewegung von Körpern. Eine Vielzahl solcher Probleme hängt beispielsweise damit zusammen, die Beschleunigung eines sich bewegenden Körpers zu ermitteln, wenn alle auf diesen Körper wirkenden Kräfte bekannt sind. Und dann werden andere Größen durch die Beschleunigung bestimmt (Momentangeschwindigkeit, Weg usw.).
Allerdings ist es oft sehr schwierig, die auf den Körper wirkenden Kräfte zu bestimmen. Um viele Probleme zu lösen, wird daher eine weitere wichtige physikalische Größe verwendet – der Impuls des Körpers.
- Der Impuls eines Körpers p ist eine vektorielle physikalische Größe, die dem Produkt aus der Masse des Körpers und seiner Geschwindigkeit entspricht
Impuls ist eine Vektorgröße. Die Richtung des Impulsvektors des Körpers stimmt immer mit der Richtung des Geschwindigkeitsvektors überein.
Die Impulseinheit im SI ist der Impuls eines Körpers mit einer Masse von 1 kg, der sich mit einer Geschwindigkeit von 1 m/s bewegt. Das bedeutet, dass die Impulseinheit eines Körpers im SI 1 kg m/s beträgt.
Bei der Berechnung verwenden sie die Gleichung für Projektionen von Vektoren: p x \u003d mv x.
Abhängig von der Richtung des Geschwindigkeitsvektors in Bezug auf die ausgewählte X-Achse kann die Projektion des Impulsvektors entweder positiv oder negativ sein.
Das Wort „Impuls“ (impulsus) bedeutet im Lateinischen „Stoß“. Einige Bücher verwenden den Begriff Momentum anstelle von Momentum.
Diese Größe wurde etwa zur gleichen Zeit in die Wissenschaft eingeführt, als Newton die später nach ihm benannten Gesetze entdeckte (also am Ende des 17. Jahrhunderts).
Wenn Körper interagieren, können sich ihre Impulse ändern. Dies kann durch ein einfaches Experiment überprüft werden.
Zwei Kugeln gleicher Masse werden an Fadenschlaufen an einem Holzlineal aufgehängt, das auf einem Stativring befestigt ist, wie in Abbildung 44, a dargestellt.
Reis. 44. Demonstration des Impulserhaltungssatzes
Kugel 2 wird um einen Winkel a aus der Vertikalen abgelenkt (Abb. 44, b) und freigegeben. Er kehrt in die vorherige Position zurück, schlägt den Ball 1 und stoppt. In diesem Fall kommt die Kugel 1 in Bewegung und weicht um den gleichen Winkel a aus (Abb. 44, c).
In diesem Fall ist es offensichtlich, dass sich durch die Wechselwirkung der Kugeln der Impuls jedes einzelnen von ihnen geändert hat: Um wie viel der Impuls von Ball 2 abnahm, um den gleichen Betrag nahm der Impuls von Ball 1 zu.
Wenn zwei oder mehr Körper nur miteinander interagieren (also keinen äußeren Kräften ausgesetzt sind), dann bilden diese Körper ein geschlossenes System.
Der Impuls jedes einzelnen Körpers in einem geschlossenen System kann sich durch seine Wechselwirkung untereinander ändern. Aber
- Die Vektorsumme der Impulse der Körper, die ein geschlossenes System bilden, ändert sich im Laufe der Zeit bei Bewegungen und Wechselwirkungen dieser Körper nicht
Dies ist das Gesetz der Impulserhaltung.
Der Impulserhaltungssatz ist auch dann erfüllt, wenn auf die Körper des Systems äußere Kräfte einwirken, deren Vektorsumme gleich Null ist. Zeigen wir dies, indem wir Newtons zweites und drittes Gesetz verwenden, um das Gesetz der Impulserhaltung abzuleiten. Stellen Sie sich der Einfachheit halber ein System vor, das nur aus zwei Körpern besteht – Kugeln mit den Massen m 1 und m 2, die sich mit den Geschwindigkeiten v 1 und v 2 geradlinig aufeinander zu bewegen (Abb. 45).

Reis. 45. Ein System aus zwei Körpern – Kugeln, die sich geradlinig aufeinander zu bewegen
Die auf die einzelnen Kugeln wirkenden Schwerkraftkräfte werden durch die elastischen Kräfte der Oberfläche, auf der sie rollen, ausgeglichen. Daher kann die Wirkung dieser Kräfte vernachlässigt werden. Die Widerstandskräfte gegen die Bewegung sind in diesem Fall gering, daher werden wir auch ihren Einfluss nicht berücksichtigen. Wir können also davon ausgehen, dass die Kugeln nur miteinander interagieren.
Abbildung 45 zeigt, dass die Kugeln nach einiger Zeit kollidieren. Während einer sehr kurzen Kollisionszeit t treten Wechselwirkungskräfte F 1 und F 2 auf, die jeweils auf die erste und zweite Kugel wirken. Durch die Krafteinwirkung verändern sich die Geschwindigkeiten der Kugeln. Bezeichnen wir die Geschwindigkeiten der Kugeln nach dem Zusammenstoß mit den Buchstaben v 1 und v 2 .
Gemäß dem dritten Newtonschen Gesetz sind die Wechselwirkungskräfte der Kugeln betragsmäßig gleich und in entgegengesetzte Richtungen gerichtet:
Nach dem zweiten Newtonschen Gesetz kann jede dieser Kräfte durch das Produkt aus Masse und Beschleunigung ersetzt werden, das jede der Kugeln während der Wechselwirkung erhält:
m 1 a 1 \u003d -m 2 a 2.
Wie Sie wissen, werden Beschleunigungen aus den Gleichungen bestimmt:

Wenn wir die entsprechenden Ausdrücke in der Gleichung für Beschleunigungskräfte ersetzen, erhalten wir:
![]()
Als Ergebnis der Reduzierung beider Teile der Gleichheit um t erhalten wir:
m1 (v "1 - v 1) \u003d -m 2 (v" 2 - v 2).
Wir gruppieren die Terme dieser Gleichung wie folgt:
m 1 v 1 "+ m 2 v 2" = m 1 v 1 = m 2 v 2. (1)
Unter Berücksichtigung von mv = p schreiben wir Gleichung (1) in der folgenden Form:
P "1 + P" 2 \u003d P 1 + P 2. (2)
Der linke Teil der Gleichungen (1) und (2) ist der Gesamtimpuls der Kugeln nach ihrer Wechselwirkung, der rechte Teil ist der Gesamtimpuls vor der Wechselwirkung.
Dies bedeutet, dass trotz der Tatsache, dass sich der Impuls jeder der Kugeln während der Wechselwirkung änderte, die Vektorsumme ihrer Impulse nach der Wechselwirkung dieselbe blieb wie vor der Wechselwirkung.
Die Gleichungen (1) und (2) sind die mathematische Aufzeichnung des Impulserhaltungssatzes.
Da dieser Kurs nur die Wechselwirkungen von Körpern berücksichtigt, die sich entlang einer geraden Linie bewegen, reicht zum Schreiben des Impulserhaltungssatzes in Skalarform eine Gleichung aus, die die Projektionen von Vektorgrößen auf die X-Achse enthält:
m 1 v "1x + m 2 v" 2x \u003d m 1 v 1x + m 2 v 2x.
Fragen
- Wie nennt man den Impuls des Körpers?
- Was lässt sich über die Richtungen der Impulsvektoren und die Geschwindigkeit eines bewegten Körpers sagen?
- Erzählen Sie uns etwas über den Verlauf des in Abbildung 44 gezeigten Experiments. Was bedeutet es?
- Was bedeutet die Aussage, dass mehrere Körper ein geschlossenes System bilden?
- Formulieren Sie den Impulserhaltungssatz.
- Schreiben Sie für ein geschlossenes System aus zwei Körpern den Impulserhaltungssatz in Form einer Gleichung auf, die die Massen und Geschwindigkeiten dieser Körper enthält. Erklären Sie, was jedes Symbol in dieser Gleichung bedeutet.
Übung 20
- Zwei Spielzeuguhrwerksmaschinen mit einem Gewicht von jeweils 0,2 kg bewegen sich geradlinig aufeinander zu. Die Geschwindigkeit jeder Maschine relativ zum Boden beträgt 0,1 m/s. Sind die Impulsvektoren der Maschinen gleich? Module von Impulsvektoren? Bestimmen Sie die Projektion des Impulses jeder Maschine auf die X-Achse parallel zu ihren Flugbahnen.
- Um wie viel ändert sich der Impuls eines Autos mit einer Masse von 1 Tonne (in absoluten Werten), wenn sich seine Geschwindigkeit von 54 auf 72 km/h ändert?
- Ein Mann sitzt in einem Boot und ruht auf der Oberfläche eines Sees. Irgendwann steht er auf und geht vom Heck zum Bug. Was passiert mit dem Boot? Erklären Sie das Phänomen anhand des Impulserhaltungssatzes.
- Ein 35 Tonnen schwerer Eisenbahnwaggon fährt auf einen auf dem gleichen Gleis stehenden 28 Tonnen schweren Eisenbahnwaggon zu und kuppelt automatisch mit diesem zusammen. Nach dem Ankuppeln bewegen sich die Wagen geradlinig mit einer Geschwindigkeit von 0,5 m/s. Wie schnell war das 35 Tonnen schwere Auto vor dem Ankuppeln?
