E voll \u003d E kin + U
E kin \u003d mv 2 / 2 + Jw 2 / 2 - kinetische Energie der Translations- und Rotationsbewegung,
U = mgh ist die potentielle Energie eines Körpers der Masse m in einer Höhe h über der Erdoberfläche.
F tr \u003d kN - Gleitreibungskraft, N - Normaldruckkraft, k - Reibungskoeffizient.
Bei einem außermittigen Stoß gilt der Impulserhaltungssatz
S p ich= const wird in Projektionen auf die Koordinatenachsen geschrieben.
Das Gesetz der Drehimpulserhaltung und das Gesetz der Dynamik der Rotationsbewegung
S L ich= const ist das Gesetz der Drehimpulserhaltung,
L OS \u003d Jw - axialer Drehimpuls,
L Kugel = [ Rp] ist der Bahndrehimpuls,
dL/dt=SM ext - das Gesetz der Drehbewegungsdynamik,
M= [Rf] = rFsina – Kraftmoment, F – Kraft, a – Winkel zwischen Radius-Vektor und Kraft.
A \u003d òMdj - Arbeit während der Drehbewegung.
Abschnitt Mechanik
Kinematik
Aufgabe
Aufgabe. Die Abhängigkeit des vom Körper zurückgelegten Weges von der Zeit ist durch die Gleichung s = A–Bt+Ct 2 gegeben. Finden Sie die Geschwindigkeit und Beschleunigung des Körpers zum Zeitpunkt t.
Lösungsbeispiel
v \u003d ds / dt \u003d -B + 2Ct, a \u003d dv / dt \u003d ds 2 / dt 2 \u003d 2C.
Optionen
1.1. Die Abhängigkeit des vom Körper zurückgelegten Weges von der Zeit ist gegeben durch
die Gleichung s \u003d A + Bt + Ct 2, wobei A \u003d 3m, B \u003d 2 m / s, C \u003d 1 m / s 2.
Finden Sie die Geschwindigkeit in der dritten Sekunde.
2.1. Die Abhängigkeit des vom Körper zurückgelegten Weges von der Zeit ist gegeben durch
die Gleichung s \u003d A + Bt + Ct 2 + Dt 3, wobei C \u003d 0,14 m / s 2 und D \u003d 0,01 v / c 3.
Nach wie viel Zeit nach Bewegungsbeginn erfolgt die Beschleunigung des Körpers
wird gleich 1 m / s 2 sein.
3.1 Das gleichmäßig beschleunigt drehende Rad hat die Winkelgeschwindigkeit erreicht
20 rad/s durch N = 10 Umdrehungen nach Bewegungsbeginn. Finden
Winkelbeschleunigung des Rades.
4.1 Ein Rad mit einem Radius von 0,1 m dreht sich so, dass die Abhängigkeit vom Winkel
j \u003d A + Bt + Ct 3, wobei B \u003d 2 rad / s und C \u003d 1 rad / s 3. Für Punkte liegen
am Radkranz, finden Sie nach 2 s nach Bewegungsbeginn:
1) Winkelgeschwindigkeit, 2) Lineargeschwindigkeit, 3) Winkelgeschwindigkeit
Beschleunigung, 4) Tangentialbeschleunigung.
5.1 Ein Rad mit einem Radius von 5 cm dreht sich so, dass die Winkelabhängigkeit
Die Drehung des Radradius gegenüber der Zeit ist durch die Gleichung gegeben
j \u003d A + Bt + Ct 2 + Dt 3, wobei D \u003d 1 rad / s 3. Finden Sie nach liegenden Punkten
am Radkranz die Änderung der Tangentialbeschleunigung z
jede Sekunde der Bewegung.
6.1 Ein Rad mit einem Radius von 10 cm dreht sich so, dass die Abhängigkeit
Lineargeschwindigkeit der auf dem Radkranz liegenden Punkte, aus
Die Zeit ergibt sich aus der Gleichung v \u003d At + Bt 2, wobei A \u003d 3 cm / s 2 und
B \u003d 1 cm / s 3. Finden Sie den Winkel, der durch den Vektor des Vollständigen gebildet wird
Beschleunigung mit Radradius zum Zeitpunkt t = 5s nach
Beginn der Bewegung.
7.1 Das Rad dreht sich damit die Abhängigkeit des Drehwinkels vom Radius
Rad über der Zeit ist durch die Gleichung j = A + Bt + Ct 2 + Dt 3 gegeben, wobei gilt:
B \u003d 1 rad / s, C \u003d 1 rad / s 2, D \u003d 1 rad / s 3. Finden Sie den Radius des Rades,
wenn bekannt ist, dass bis zum Ende der zweiten Bewegungssekunde
die Normalbeschleunigung der auf dem Radkranz liegenden Punkte ist
und n \u003d 346 m / s 2.
8.1 Der Radiusvektor eines materiellen Punktes ändert sich mit der Zeit gem
Gesetz R=t 3 ich+ t2 j. Bestimmen Sie für den Zeitpunkt t = 1 s:
Geschwindigkeitsmodul und Beschleunigungsmodul.
9.1 Der Radiusvektor eines materiellen Punktes ändert sich mit der Zeit gem
Gesetz R=4t2 ich+ 3t j+2zu. Schreiben Sie einen Ausdruck für einen Vektor
Geschwindigkeit und Beschleunigung. Bestimmen Sie für die Zeit t = 2 s
Geschwindigkeitsmodul.
10.1 Ein Punkt bewegt sich in der xy-Ebene von einer Position mit Koordinaten
x 1 = y 1 = 0 mit Geschwindigkeit v= A ich+Bx j. Gleichung definieren
die Bahn des Punktes y(x) und die Form der Bahn.
Trägheitsmoment
Abstand L/3 vom Stangenanfang.
Lösungsbeispiel.
M - Stangenmasse J = J st + J gr
L - Stangenlänge J st1 \u003d ml 2 / 12 - Trägheitsmoment der Stange
2m ist das Gewicht des Gewichts relativ zu seinem Mittelpunkt. Nach Satz
Steiner findet das Trägheitsmoment
J=? Stab relativ zur o-Achse, beabstandet von der Mitte durch einen Abstand a = L/2 - L/3 = L/6.
J st \u003d ml 2/12 + m (L / 6) 2 \u003d ml 2/9.
Nach dem Superpositionsprinzip
J \u003d ml 2 / 9 + 2m (2L / 3) 2 \u003d ml 2.
Optionen
1.2. Bestimmen Sie das Trägheitsmoment eines Stabes mit einer Masse von 2 m relativ zu einer Achse, die vom Anfang des Stabes um den Abstand L/4 entfernt ist. Am Ende des Stabes befindet sich die konzentrierte Masse m.
2.2 Bestimmen Sie das Trägheitsmoment des Stabes mit der Masse m relativ zu
Achse vom Beginn der Stange in einem Abstand L / 5 beabstandet. Am Ende
Stab konzentrierte Masse 2m.
3.2. Bestimmen Sie das Trägheitsmoment eines Stabes mit einer Masse von 2 m um eine Achse, die vom Anfang des Stabes um den Abstand L/6 entfernt ist. Am Ende des Stabes befindet sich die konzentrierte Masse m.
4.2. Bestimmen Sie das Trägheitsmoment einer Stange mit einer Masse von 3 m um eine Achse, die vom Anfang der Stange um einen Abstand L/8 entfernt ist. Am Ende der Stange beträgt die konzentrierte Masse 2 m.
5.2. Bestimmen Sie das Trägheitsmoment eines Stabes mit einer Masse von 2m um die durch den Stabanfang verlaufende Achse. Am Ende und in der Mitte des Stabes sind konzentrierte Massen m angebracht.
6.2. Bestimmen Sie das Trägheitsmoment eines Stabes mit einer Masse von 2m um die durch den Stabanfang verlaufende Achse. Am Ende des Stabes ist ein 2m großes konzentriertes Gewicht und in der Mitte ein 2m großes konzentriertes Gewicht angebracht.
7.2. Bestimmen Sie das Trägheitsmoment des Stabes mit der Masse m um die Achse, das L/4 vom Anfang des Stabes ist. Am Ende und in der Mitte des Stabes sind konzentrierte Massen m angebracht.
8.2. Finden Sie das Trägheitsmoment eines dünnen homogenen Rings der Masse m und des Radius r um eine Achse, die in der Ebene des Rings liegt und von seinem Mittelpunkt um r/2 beabstandet ist.
9.2. Finden Sie das Trägheitsmoment einer dünnen homogenen Scheibe der Masse m und des Radius r um eine Achse, die in der Ebene der Scheibe liegt und von ihrem Mittelpunkt um r/2 beabstandet ist.
10.2. Finden Sie das Trägheitsmoment einer homogenen Kugel mit Masse m und Radius
r relativ zu der Achse, die von ihrem Mittelpunkt um r/2 beabstandet ist.
Tomsk: TUSUR, 2012.- 136 p.
Dieses Handbuch enthält 13 Kapitel zu den Hauptbereichen der Mechanik, die von der Grundnorm des Sportunterrichts für Studenten technischer Fachrichtungen an Universitäten bereitgestellt werden. Auf der ursprünglichen methodischen Ebene skizziert das Handbuch die Grundlagen der Koordinatenmethode und des vektorkonzeptionellen Apparats der Mechanik, die Grundlagen der Kinematik und Dynamik der Translations- und Rotationsbewegung eines starren Körpers, die Erhaltungssätze von Energie und Impuls der Mechanik Systeme; Mechanik von Flüssigkeiten und elastischen Festkörpern, klassische Gravitationstheorie und Bewegung von Himmelskörpern, grundlegende Eigenschaften harmonischer Schwingungen, physikalische Grundlagen der speziellen Relativitätstheorie. Dieses Handbuch zur Physik wird in der prägnantesten, aber recht informativen Sprache präsentiert. Generell scheint dieses Handbuch nicht nur für Studienanfänger, sondern für alle Absolventen technischer Hochschulen sinnvoll zu sein. Auch bei der Darstellung einiger Abschnitte finden Physiklehrer neue Ansätze.
Format: pdf
Die Größe: 1,7 MB
Ansehen, herunterladen:yandex.disk
INHALTSVERZEICHNIS
Einführung 6
1 Koordinatenmethode. Vektoren 9
1.1 Definitionen primärer physikalischer Begriffe 9
1.2 Koordinatensystem 10
1.3 Geschwindigkeit und Beschleunigung 11
1.4 Koordinatenänderung als Integral der Geschwindigkeit 12
1.5 Verallgemeinerung auf den Fall der dreidimensionalen Bewegung 13
1.6 Vektoren 14
1.7 Vektoralgebra 16
2 Materialkinematik Punkt 19
2.1 Kurvengeschwindigkeit und Beschleunigung 19
2.2 Kreuzprodukt 21
2.3 Kinematik der Drehbewegung 24
2.4 Bewegung eines schräg zur Horizontalen geworfenen Körpers 26
3 Bewegungsgesetze 29
3.1 Der Machtbegriff 29
3.2 Zweites Newtonsches Gesetz. Gewicht 30
3.3 Newtons drittes Gesetz 31
3.4 Trägheitsbezugssystem 33
3.5 Nicht-Trägheitsbezugssystem 34
3.6 Galileis Relativitätsprinzip 35
3.7 Beispiele verschiedener Kräfte 36
4 Schwung und Energie 40
4.1 Trägheitszentrum (Schwerpunkt) eines ausgedehnten Körpers 40
4.2 Bestimmung der Schwerpunktlage einfacher Körper 42
4.3 Körperschwung 43
4.4 Mechanische Arbeit und kinetische Energie 44
4.5 Konservative Kräfte 46
4.6 Potentielle Energie. Steigung 47
4.7 Der Erhaltungssatz der mechanischen Energie 49
5 Kollision zweier Teilchen 51
5.1 Innere Energie eines mechanischen Systems 51
5.2 Klassifizierung von Doppelkollisionen 52
5.3 Absolut elastischer zentraler (frontaler) Aufprall 53
5.4 Absolut unelastischer Stoß 54
5.5 Kollision im C-System 55
5.6 Absolut elastischer außermittiger Stoß 55
6 Strömungsmechanik 58
6.1 Pascalsches Gesetz 58
6.2 Hydrostatischer Druck. Stärke von Archimedes 59
6.3 Stationäre Strömung eines idealen Fluids 60
6.4 Anwendungsbeispiele der Bernoulli-Gleichung 62
6.5 Viskose Reibung 64
6.6 Die Strömung einer viskosen Flüssigkeit durch ein Rohr 65
6.7 Turbulente Strömung. Reynolds-Nummer 66
6.8 Widerstandskräfte bei der Bewegung von Körpern in einer viskosen Flüssigkeit 67
7 Elastische Eigenschaften von Festkörpern 69
7.1 Stress und Belastung 69
7.2 Hookesches Gesetz. Elastizitätsmodul und Querkontraktionszahl 71
7.3 Energie der elastischen Verformung des Mediums 72
7.4 Rundumkompression 72
7.5 Druckverformung eines feststehenden Stabes 73
7.6 Thermische Verformung von Festkörpern 74
7.7 Schubverformung 75
8 Dynamik eines starren Körpers 78
8.1 Trägheitsmoment eines starren Körpers 78
8.2 Trägheitsmomente einiger einfacher Körper 79
8.3 Kraftmoment 81
8.4 Winkelmoment 82
8.5 Rotationsdynamik 83
8.6 Herunterrollen eines runden Körpers auf einer schiefen Ebene 84
9 3D-Rotation starrer Körper 87
9.1 Tensor des Trägheitsmoments eines starren Körpers 87
9.2 Energie und Drehimpuls eines asymmetrischen Körpers 89
9.3 Kreisel 89
9.4 Zentrifugal- und Corioliskräfte 91
10 Schwerkraft 94
10.1 Newtonsches Gravitationsgesetz 94
10.2 Schwerkraft in der Nähe ausgedehnter Körper 96
10.3 Gezeitenkräfte 98
10.4 Kepler-Problem 99
10.5 Parameter von Ellipsenbahnen 101
10.6 Algorithmus zur Berechnung der Flugbahn eines Himmelskörpers 103
11 Oberschwingungen 104
11.1 Kleine Vibrationen 104
11.2 Vibrationsbewegungsenergie 106
11.3 Addition eindimensionaler Schwingungen. Schläge 106
11.4 Addition senkrecht aufeinander stehender Schwingungen 107
11.5 Schwingungen gekoppelter Pendel 108
12 Das Relativitätsprinzip 112
12.1 Die Lichtgeschwindigkeit und Einsteins Postulat 112
12.2 Lorentztransformationen 114
12.3 Folgen von Lorentztransformationen 116
12.3.1 Relativität der Gleichzeitigkeit 116
12.3.2 Relativität von Segmentlängen 117
12.3.3 Relativität von Zeitintervallen zwischen Ereignissen. . 118
12.4 Geschwindigkeitszusatz 119
12.5 Lichtfehler 120
13 Relativistische Dynamik 122
13.1 Relativistischer Impuls 122
13.2 Energie relativistischer Teilchen 123
13.3 Erhaltungssatz der Gesamtenergie 124
13.4 Inelastischer Stoß zweier relativistischer Teilchen 126
13.5 Vierdimensionale Raumzeit 127
13.6 Skalarprodukt von 4-Vektoren 129
13.7 Optischer Doppler-Effekt 131
Fazit 134
Literatur 135
Dieses Handbuch enthält 13 Kapitel zu den Hauptbereichen der Mechanik, die von der Grundnorm des Sportunterrichts für Studenten technischer Fachrichtungen an Universitäten bereitgestellt werden.
Auf der ursprünglichen methodischen Ebene skizziert das Handbuch die Grundlagen der Koordinatenmethode und des vektorkonzeptionellen Apparats der Mechanik, die Grundlagen der Kinematik und Dynamik der Translations- und Rotationsbewegung eines starren Körpers, die Gesetze der Energieerhaltung und des Impulses der Mechanik Systeme, Mechanik von Flüssigkeiten und elastischen Festkörpern, klassische Gravitationstheorie und Bewegung von Himmelskörpern, Grundeigenschaften harmonischer Schwingungen, physikalische Grundlagen der speziellen Relativitätstheorie.
Der Inhalt der Kapitel ist eine kohärente und konsistente Darstellung des Materials, in der die wichtigsten Elemente besonders hervorgehoben werden: Definitionen neuer Begriffe, Aussagen, die die Kraft von Theoremen haben, Tatsachen oder Bestimmungen, die vom Leser besondere Aufmerksamkeit erfordern. Am Ende jedes Kapitels befindet sich eine Liste mit Kontrollfragen, die der Leser während des Kolloquiums oder Gesprächs mit dem Lehrer beantworten können sollte.
Alle Vektorgrößen in Formeln und Text sind fett dargestellt, z. B. der Geschwindigkeitsvektor v. Das Skalarprodukt von Vektoren wird durch einen Punkt zwischen den Faktorvektoren - Fv und das Vektorprodukt durch ein Kreuz - g xp gekennzeichnet. Klammern in mathematischen Formeln werden nur für die standardmäßige Gruppierung mathematischer Operationen und die Bezeichnung von Funktionsargumenten verwendet.
Dieses Handbuch zur Physik wird in der prägnantesten, aber recht informativen Sprache präsentiert. Generell scheint dieses Handbuch nicht nur für Studienanfänger, sondern für alle Absolventen technischer Hochschulen sinnvoll zu sein. Auch bei der Darstellung einiger Abschnitte finden Physiklehrer neue Ansätze.
Energie und Impuls sind die wichtigsten Begriffe der Physik. Es stellt sich heraus, dass Naturschutzgesetze generell eine wichtige Rolle spielen. Die Suche nach Erhaltungsgrößen und den Gesetzmäßigkeiten, aus denen sie gewonnen werden können, ist Gegenstand der Forschung in vielen Bereichen der Physik. Lassen Sie uns diese Gesetze am einfachsten aus dem zweiten Newtonschen Gesetz ableiten.
Impulserhaltungssatz.Impuls, oder Menge an Bewegungp als Produkt der Masse definiert m Materialpunkt pro Geschwindigkeit v: p= mv. Newtons zweites Gesetz, das die Definition des Impulses verwendet, wird geschrieben als
= dp= F, (1.3.1)
hier F ist die Resultierende der auf den Körper wirkenden Kräfte.
geschlossenes System wird ein System genannt, bei dem die Summe der auf den Körper wirkenden äußeren Kräfte gleich Null ist:
F= å Fich= 0 . (1.3.2)
Dann ist die Änderung des Impulses des Körpers in einem abgeschlossenen System nach Newtons zweitem Gesetz (1.3.1), (1.3.2).
dp= 0 . (1.3.3)
In diesem Fall bleibt der Impuls des Teilchensystems konstant:
p= å pich= konstant . (1.3.4)
Dieser Ausdruck ist Gesetz der Impulserhaltung, die wie folgt formuliert wird: Wenn die Summe der auf einen Körper oder Körpersystem wirkenden äußeren Kräfte gleich Null ist, ist der Impuls des Körpers oder Körpersystems ein konstanter Wert.
Gesetz der Energieeinsparung. Im Alltag verstehen wir unter dem Begriff „Arbeit“ jede nützliche Arbeit eines Menschen. In der Physik wird es studiert mechanische Arbeit, die nur auftritt, wenn sich der Körper unter Einwirkung einer Kraft bewegt. Die mechanische Arbeit ∆A ist definiert als das Skalarprodukt der Kraft F auf den Körper aufgebracht, und Körperverschiebung Δ r als Ergebnis dieser Kraft:
EIN EIN= (F, Δ r) = F EIN r cosα. (1.3.5)
In Formel (1.3.5) wird das Vorzeichen der Arbeit durch das Vorzeichen von cos α bestimmt.
Wenn wir den Schrank bewegen wollen, drücken wir mit Kraft darauf, aber wenn er sich nicht gleichzeitig bewegt, leisten wir keine mechanische Arbeit. Man kann sich den Fall vorstellen, wenn sich der Körper ohne Beteiligung von Kräften (durch Trägheit) bewegt,
in diesem Fall wird auch keine mechanische Arbeit geleistet. Wenn ein Körpersystem Arbeit verrichten kann, dann hat es Energie.
Energie ist einer der wichtigsten Begriffe nicht nur in der Mechanik, sondern auch in anderen Bereichen der Physik: Thermodynamik und Molekülphysik, Elektrizität, Optik, Atom-, Kern- und Teilchenphysik.
In jedem System, das zur physischen Welt gehört, wird bei jedem Prozess Energie gespart. Nur die Form, in die sie übergeht, kann sich ändern. Wenn beispielsweise eine Kugel auf einen Ziegelstein trifft, wird ein Teil der kinetischen Energie (mehr noch) in Wärme umgewandelt. Der Grund dafür ist das Vorhandensein einer Reibungskraft zwischen der Kugel und dem Ziegel, in der sie sich mit großer Reibung bewegt. Wenn sich der Turbinenrotor dreht, wird mechanische Energie in elektrische Energie umgewandelt und gleichzeitig tritt in einem geschlossenen Stromkreis ein Strom auf. Die bei der Verbrennung chemischer Brennstoffe freigesetzte Energie, d.h. die Energie molekularer Bindungen wird in thermische Energie umgewandelt. Die Natur der chemischen Energie ist die Energie intermolekularer und interatomarer Bindungen, die im Wesentlichen molekulare oder atomare Energie darstellt.
Energie ist eine skalare Größe, die die Fähigkeit eines Körpers charakterisiert, Arbeit zu verrichten:
E2-E1= ∆A. (1.3.6)
Wenn mechanische Arbeit verrichtet wird, ändert sich die Energie eines Körpers von einer Form in eine andere. Die Energie eines Körpers kann in Form von kinetischer oder potentieller Energie vorliegen.
Die Energie der mechanischen Bewegung
W Verwandte = .
namens kinetische Energie Vorwärtsbewegung des Körpers. Arbeit und Energie werden im SI-Einheitensystem in Joule (J) gemessen.
Energie kann nicht nur durch die Bewegung von Körpern bestimmt werden, sondern auch durch ihre gegenseitige Anordnung und Form. Diese Energie heißt Potenzial.
Potenzielle Energie besitzen relativ zueinander zwei Lasten, die durch eine Feder verbunden sind, oder ein Körper, der sich in einer bestimmten Höhe über der Erde befindet. Dieses letzte Beispiel bezieht sich auf die potenzielle Energie der Gravitation, wenn sich ein Körper von einer Höhe über der Erde zu einer anderen bewegt. Er wird nach der Formel berechnet
mechanische Energie.
Abhängigkeiten des Impulses von der Bewegungsgeschwindigkeit zweier Körper. Welcher Körper hat die größere Masse und um wie viel? 1) Die Massen der Körper sind gleich 2) Die Masse des Körpers 1 ist 3,5-mal größer 3) Die Masse des Körpers 2 ist 3,5-mal größer 4) Die Massen der Körper sind laut Diagramm nicht vergleichbar
Es bewegt sich mit einer Geschwindigkeit v und kollidiert mit einer ruhenden Plastilinkugel der Masse 2t. Nach dem Aufprall kleben die Kugeln zusammen und bewegen sich gemeinsam. Wie groß ist ihre Bewegungsgeschwindigkeit? 1) v/3 2) 2v/3 3) v/2 4) Nicht genügend Daten, um zu antworten
Sie bewegen sich entlang einer geradlinigen Eisenbahnstrecke mit Geschwindigkeiten, deren zeitliche Abhängigkeit der Projektionen auf eine Achse parallel zu den Gleisen in der Abbildung dargestellt ist. Nach 20 Sekunden erfolgte eine automatische Kopplung zwischen den Autos. Mit welcher Geschwindigkeit und in welche Richtung sollen die gekuppelten Waggons fahren? 1) 1,4 m/s, Richtung Anfangsbewegung 1. 2) 0,2 m/s, Richtung Anfangsbewegung 1. 3) 1,4 m/s, Richtung Anfangsbewegung 2. 4) 0,2 m/s, Richtung Anfangsbewegung 2.
Der Wert, der angibt, welche Arbeit der Körper verrichten kann Perfekte Arbeit entspricht der Veränderung der Energie des Körpers
Nach der Gleichung x: = 2 + 30 t - 2 t2, geschrieben in SI. Körpergewicht 5 kg. Wie groß ist die kinetische Energie des Körpers 3 Sekunden nach Beginn der Bewegung? 1) 810 J 2) 1440 J 3) 3240 J 4) 4410 J
deformierter Körper
Dies ist Arbeit 2 J. Welche Arbeit sollte getan werden, um die Feder weitere 4 cm zu dehnen. 1) 16 J 2) 4 J 3) 8 J 4) 2 J
Bestimmen Sie die kinetische Energie Ek, die der Körper am Scheitelpunkt der Bahn hat (siehe Abbildung)? 1) EK=mgH 2) EK=m(V0)2/2 + mgh-mgH 3) EK=mgH-mgh 4) EK=m(V0)2/2 + mgH
gleiche Anfangsgeschwindigkeit. Das erste Mal war der Geschwindigkeitsvektor des Balls vertikal nach unten gerichtet, das zweite Mal – vertikal nach oben, das dritte Mal – horizontal. Luftwiderstand ignorieren. Der Geschwindigkeitsmodul des Balls bei Annäherung an den Boden ist: 1) mehr im ersten Fall 2) mehr im zweiten Fall 3) mehr im dritten Fall 4) in allen Fällen gleich
Foto des Aufbaus zur Untersuchung des Gleitens eines 40 g schweren Schlittens entlang einer schiefen Ebene in einem Winkel von 30º. Im Moment des Beginns der Bewegung schaltet der obere Sensor die Stoppuhr ein. Wenn der Schlitten den unteren Sensor passiert, stoppt die Stoppuhr. Schätzen Sie die Wärmemenge ab, die freigesetzt wird, wenn der Schlitten die geneigte Ebene zwischen den Sensoren hinuntergleitet.
Es fällt von Punkt 1 nach Punkt 3 ab (Abb.). An welchem Punkt der Flugbahn hat seine kinetische Energie den größten Wert? 1) An Punkt 1. 2) An Punkt 2. 3) An Punkt 3. 4) An allen Punkten sind die Energiewerte gleich.
Sie steigen entlang des gegenüberliegenden Abhangs bis zu einer Höhe von 2 m (bis Punkt 2 in der Abbildung) und stoppen. Das Gewicht des Schlittens beträgt 5 kg. Ihre Geschwindigkeit am Grund der Schlucht betrug 10 m/s. Wie hat sich die mechanische Gesamtenergie des Schlittens bei der Bewegung von Punkt 1 nach Punkt 2 verändert? 1) Hat sich nicht geändert. 2) Erhöht um 100 J. 3) Verringert um 100 J. 4) Verringert um 150 J. 2
Körper Schwung
Der Impuls eines Körpers ist eine Größe, die gleich dem Produkt aus der Masse des Körpers und seiner Geschwindigkeit ist.
Es sei daran erinnert, dass es sich um einen Körper handelt, der als materieller Punkt dargestellt werden kann. Der Impuls eines Körpers ($p$) wird auch Impuls genannt. Der Impulsbegriff wurde von René Descartes (1596-1650) in die Physik eingeführt. Später tauchte der Begriff „Impuls“ auf (Impulsus bedeutet im Lateinischen „Stoß“). Momentum ist eine Vektorgröße (wie Geschwindigkeit) und wird durch die Formel ausgedrückt:
$p↖(→)=mυ↖(→)$
Die Richtung des Impulsvektors fällt immer mit der Richtung der Geschwindigkeit zusammen.
Die Impulseinheit in SI ist der Impuls eines Körpers mit einer Masse von $1$ kg, der sich mit einer Geschwindigkeit von $1$ m/s bewegt, daher ist die Impulseinheit $1$ kg $·$ m/s.
Wirkt auf einen Körper (materieller Punkt) im Zeitintervall $∆t$ eine konstante Kraft, so ist auch die Beschleunigung konstant:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
wobei $(υ_1)↖(→)$ und $(υ_2)↖(→)$ die Anfangs- und Endgeschwindigkeiten des Körpers sind. Setzen wir diesen Wert in den Ausdruck des zweiten Newtonschen Gesetzes ein, erhalten wir:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Wenn wir die Klammern öffnen und den Ausdruck für den Impuls des Körpers verwenden, haben wir:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Dabei ist $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ die Impulsänderung über die Zeit $∆t$. Dann wird die vorherige Gleichung:
$∆p↖(→)=F↖(→)∆t$
Der Ausdruck $∆p↖(→)=F↖(→)∆t$ ist eine mathematische Darstellung des zweiten Newtonschen Gesetzes.
Das Produkt aus einer Kraft und ihrer Dauer heißt Moment der Kraft. So Die Impulsänderung eines Punktes ist gleich der Impulsänderung der auf ihn wirkenden Kraft.
Der Ausdruck $∆p↖(→)=F↖(→)∆t$ wird aufgerufen Körperbewegungsgleichung. Es sollte beachtet werden, dass die gleiche Wirkung – eine Änderung des Impulses eines Punktes – durch eine kleine Kraft in einem langen Zeitraum und durch eine große Kraft in einem kleinen Zeitraum erreicht werden kann.
Impuls des Systems tel. Gesetz der Impulsänderung
Der Impuls (Impuls) eines mechanischen Systems ist ein Vektor, der gleich der Summe der Impulse aller materiellen Punkte dieses Systems ist:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Die Gesetze der Änderung und der Impulserhaltung sind eine Folge des zweiten und dritten Newtonschen Gesetzes.
Stellen Sie sich ein System vor, das aus zwei Körpern besteht. Die Kräfte ($F_(12)$ und $F_(21)$ in der Abbildung, mit denen die Körper des Systems aufeinander einwirken, werden als innere Kräfte bezeichnet.
Auf das System wirken zusätzlich zu den inneren Kräften die äußeren Kräfte $(F_1)↖(→)$ und $(F_2)↖(→)$. Für jeden Körper kann die Gleichung $∆p↖(→)=F↖(→)∆t$ geschrieben werden. Wenn wir die linken und rechten Teile dieser Gleichungen addieren, erhalten wir:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Nach Newtons drittem Gesetz $(F_(12))↖(→)=-(F_(21))↖(→)$.
Somit,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
Auf der linken Seite ist die geometrische Summe der Impulsänderungen aller Körper des Systems, gleich der Impulsänderung des Systems selbst - $(∆p_(syst))↖(→)$ , die Gleichheit $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ kann geschrieben werden:
$(∆p_(sys))↖(→)=F↖(→)∆t$
wobei $F↖(→)$ die Summe aller äußeren Kräfte ist, die auf den Körper einwirken. Das erhaltene Ergebnis bedeutet, dass nur äußere Kräfte den Impuls des Systems ändern können und die Änderung des Impulses des Systems in die gleiche Richtung gerichtet ist wie die gesamte äußere Kraft. Dies ist die Essenz des Gesetzes der Änderung des Impulses eines mechanischen Systems.
Innere Kräfte können den Gesamtimpuls des Systems nicht ändern. Sie verändern nur die Impulse der einzelnen Körper des Systems.
Impulserhaltungssatz
Aus der Gleichung $(∆p_(syst))↖(→)=F↖(→)∆t$ folgt der Impulserhaltungssatz. Wirken keine äußeren Kräfte auf das System, so verschwindet die rechte Seite der Gleichung $(∆p_(syst))↖(→)=F↖(→)∆t$, was bedeutet, dass der Gesamtimpuls des Systems unverändert bleibt :
$(∆p_(sys))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Ein System, auf das keine äußeren Kräfte wirken oder die Resultierende äußerer Kräfte gleich Null ist, wird als System bezeichnet geschlossen.
Das Impulserhaltungsgesetz besagt:
Der Gesamtimpuls eines abgeschlossenen Systems von Körpern bleibt bei jeder Wechselwirkung der Körper des Systems untereinander konstant.
Das erhaltene Ergebnis gilt für ein System mit beliebig vielen Körpern. Wenn die Summe der äußeren Kräfte nicht gleich Null ist, aber die Summe ihrer Projektionen in eine Richtung gleich Null ist, dann ändert sich die Projektion des Impulses des Systems in diese Richtung nicht. So kann beispielsweise ein System von Körpern auf der Erdoberfläche aufgrund der auf alle Körper wirkenden Schwerkraft nicht als geschlossen betrachtet werden, die Summe der Projektionen von Impulsen in horizontaler Richtung kann jedoch unverändert bleiben (in Abwesenheit Reibung), da in dieser Richtung die Schwerkraft nicht gilt.
Strahlantrieb
Betrachten Sie Beispiele, die die Gültigkeit des Impulserhaltungsgesetzes bestätigen.
Nehmen wir einen Gummiballon für Kinder, blasen ihn auf und lassen ihn los. Wir werden sehen, dass der Ballon selbst in die andere Richtung fliegt, wenn die Luft in eine Richtung austritt. Die Bewegung des Balls ist ein Beispiel für Strahlantrieb. Es erklärt sich aus dem Impulserhaltungssatz: Der Gesamtimpuls des Systems "Ball plus Luft darin" vor dem Luftaustritt ist Null; er muss während der Bewegung gleich Null bleiben; daher bewegt sich die Kugel in der Richtung, die der Richtung des Strahlausflusses entgegengesetzt ist, und zwar mit einer solchen Geschwindigkeit, dass ihr Impuls im Absolutwert gleich dem Impuls des Luftstrahls ist.
Strahlantrieb wird die Bewegung eines Körpers genannt, die auftritt, wenn sich ein Teil davon mit einer bestimmten Geschwindigkeit von ihm trennt. Aufgrund des Impulserhaltungssatzes ist die Bewegungsrichtung des Körpers der Bewegungsrichtung des abgetrennten Teils entgegengesetzt.
Raketenflüge basieren auf dem Prinzip des Düsenantriebs. Eine moderne Weltraumrakete ist ein sehr komplexes Flugzeug. Die Masse der Rakete ist die Summe der Masse des Arbeitsmediums (d. h. heiße Gase, die bei der Verbrennung von Treibstoff entstehen und in Form eines Jetstreams ausgestoßen werden) und der endgültigen oder, wie sie sagen, „trockenen“ Masse der Rakete, die nach dem Ausstoß des Arbeitsfluids aus der Rakete zurückbleibt.
Wenn ein reaktiver Gasstrahl mit hoher Geschwindigkeit aus einer Rakete ausgestoßen wird, rast die Rakete selbst in die entgegengesetzte Richtung. Nach dem Impulserhaltungssatz muss der von der Rakete aufgenommene Impuls $m_(p)υ_p$ gleich dem Impuls $m_(gas) υ_(gas)$ der ausgestoßenen Gase sein:
$m_(p)υ_p=m_(Gas) υ_(Gas)$
Daraus folgt, dass die Geschwindigkeit der Rakete
$υ_p=((m_(Gas))/(m_p)) υ_(Gas)$
Aus dieser Formel ist ersichtlich, dass je größer die Geschwindigkeit der Rakete ist, desto größer ist die Geschwindigkeit der ausgestoßenen Gase und das Verhältnis der Masse des Arbeitsfluids (d. h. der Masse des Brennstoffs) zum endgültigen ("trockenen") Masse der Rakete.
Die Formel $υ_p=((m_(gas))/(m_p))·υ_(gas)$ ist ungefähr. Dabei wird nicht berücksichtigt, dass beim Verbrennen des Treibstoffs die Masse der fliegenden Rakete immer kleiner wird. Die genaue Formel für die Geschwindigkeit einer Rakete wurde 1897 von K. E. Tsiolkovsky erhalten und trägt seinen Namen.
Arbeit erzwingen
Der Begriff „Arbeit“ wurde 1826 von dem französischen Wissenschaftler J. Poncelet in die Physik eingeführt. Wenn im Alltag nur menschliche Arbeit als Arbeit bezeichnet wird, dann ist es in der Physik und insbesondere in der Mechanik allgemein anerkannt, dass Arbeit mit Gewalt verrichtet wird. Die physische Arbeitsmenge wird üblicherweise mit dem Buchstaben $A$ bezeichnet.
Arbeit erzwingen- Dies ist ein Maß für die Wirkung einer Kraft, abhängig von ihrem Modul und ihrer Richtung, sowie von der Verschiebung des Angriffspunkts der Kraft. Bei konstanter Kraft und geradliniger Bewegung wird die Arbeit durch die Gleichheit bestimmt:
$A=F|∆r↖(→)|cosα$
wobei $F$ die auf den Körper wirkende Kraft, $∆r↖(→)$ die Verschiebung, $α$ der Winkel zwischen Kraft und Verschiebung ist.

Die Arbeit der Kraft ist gleich dem Produkt aus Kraft- und Wegmodul und dem Kosinus des Winkels zwischen ihnen, also dem Skalarprodukt der Vektoren $F↖(→)$ und $∆r↖(→)$.
Arbeit ist eine skalare Größe. Wenn $α 0$ ist und wenn $90°
Wirken mehrere Kräfte auf einen Körper, so ist die Gesamtarbeit (die Summe der Arbeit aller Kräfte) gleich der Arbeit der resultierenden Kraft.
Die SI-Einheit der Arbeit ist Joule($1$J). $1$ J ist die Arbeit, die eine Kraft von $1$ N auf einem Weg von $1$ m in Richtung dieser Kraft verrichtet. Diese Einheit ist nach dem englischen Wissenschaftler J. Joule (1818-1889) benannt: $1$ J = $1$ N $·$ m. Oft werden auch Kilojoule und Millijoule verwendet: $1$ kJ $= 1.000$ J, $1$ mJ $ = 0,001 $ J.
Die Arbeit der Schwerkraft
Betrachten wir einen Körper, der entlang einer schiefen Ebene mit einem Neigungswinkel $α$ und einer Höhe $H$ gleitet.

Wir drücken $∆x$ durch $H$ und $α$ aus:
$∆x=(H)/(sinα)$
Bedenkt man, dass die Schwerkraft $F_т=mg$ einen Winkel ($90° - α$) mit der Bewegungsrichtung bildet, erhält man mit der Formel $∆x=(H)/(sin)α$ einen Ausdruck für die Arbeit der Schwerkraft $A_g$:
$A_g=mg cos(90°-α)(H)/(sinα)=mgH$
Aus dieser Formel ist ersichtlich, dass die Schwerkraftarbeit von der Höhe abhängt und nicht vom Neigungswinkel der Ebene.
Daraus folgt:
- die Arbeit der Schwerkraft hängt nicht von der Form der Bahn ab, entlang der sich der Körper bewegt, sondern nur von der Anfangs- und Endposition des Körpers;
- Wenn sich ein Körper entlang einer geschlossenen Bahn bewegt, ist die Schwerkraftarbeit Null, d.h. die Schwerkraft ist eine konservative Kraft (Kräfte mit dieser Eigenschaft werden konservativ genannt).
Die Arbeit der Reaktionskräfte, ist Null, weil die Reaktionskraft ($N$) senkrecht zur Verschiebung $∆x$ gerichtet ist.
Die Arbeit der Reibungskraft
Die Reibungskraft ist der Verschiebung $∆x$ entgegengerichtet und bildet mit ihr einen Winkel $180°$, die Arbeit der Reibungskraft ist also negativ:
$A_(tr)=F_(tr)∆x cos180°=-F_(tr) ∆x$
Da $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ dann
$A_(tr)=μmgHctgα$
Die Arbeit der elastischen Kraft
Auf eine ungedehnte Feder der Länge $l_0$ soll eine äußere Kraft $F↖(→)$ wirken, die sich um $∆l_0=x_0$ dehnt. In Position $x=x_0F_(control)=kx_0$. Nach Beendigung der Kraft $F↖(→)$ im Punkt $x_0$ wird die Feder unter der Wirkung der Kraft $F_(control)$ zusammengedrückt.

Bestimmen wir die Arbeit der elastischen Kraft, wenn sich die Koordinate des rechten Endes der Feder von $х_0$ auf $х$ ändert. Da sich die elastische Kraft in diesem Bereich linear ändert, kann im Hookeschen Gesetz ihr Mittelwert in diesem Bereich verwendet werden:
$F_(ex.av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Dann ist die Arbeit (unter Berücksichtigung der Tatsache, dass die Richtungen $(F_(exp.av.))↖(→)$ und $(∆x)↖(→)$ zusammenfallen) gleich:
$A_(exerc)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Es lässt sich zeigen, dass die Form der letzten Formel nicht vom Winkel zwischen $(F_(exp.av.))↖(→)$ und $(∆x)↖(→)$ abhängt. Die Arbeit der elastischen Kräfte hängt nur von den Verformungen der Feder im Anfangs- und Endzustand ab.
Somit ist die elastische Kraft wie die Schwerkraft eine konservative Kraft.
Macht der Kraft
Leistung ist eine physikalische Größe, die durch das Verhältnis von Arbeit zu der Zeit, in der sie erzeugt wird, gemessen wird.
Mit anderen Worten, die Leistung zeigt, wie viel Arbeit pro Zeiteinheit (in SI, für $1$ s) geleistet wird.
Die Leistung wird durch die Formel bestimmt:
wobei $N$ die Leistung ist, $A$ die in der Zeit $∆t$ verrichtete Arbeit.
Setzt man $A=F|(∆r)↖(→)|cosα$ in die Formel $N=(A)/(∆t)$ anstelle der Arbeit $A$ ein, erhält man:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Die Leistung ist gleich dem Produkt der Module der Kraft- und Geschwindigkeitsvektoren und dem Kosinus des Winkels zwischen diesen Vektoren.
Die Leistung im SI-System wird in Watt (W) gemessen. Ein Watt ($1$ W) ist die Leistung, bei der $1$ J Arbeit in $1$ s verrichtet wird: $1$ W $= 1$ J/s.
Benannt ist dieses Gerät nach dem englischen Erfinder J. Watt (Watt), der die erste Dampfmaschine baute. J. Watt selbst (1736-1819) verwendete eine andere Leistungseinheit – Pferdestärken (PS), die er einführte, um die Leistung einer Dampfmaschine und eines Pferdes vergleichen zu können: 1 $ PS. $= 735,5$
In der Technik werden oft größere Leistungseinheiten verwendet - Kilowatt und Megawatt: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
Kinetische Energie. Gesetz der Änderung der kinetischen Energie
Wenn ein Körper oder mehrere zusammenwirkende Körper (ein System von Körpern) Arbeit verrichten können, dann sagen sie, dass sie Energie haben.
Das Wort „Energie“ (von griech. energia – Handlung, Tätigkeit) wird im Alltag oft verwendet. So nennt man zum Beispiel Menschen, die schnell arbeiten können, energisch, mit großer Energie.
Die Energie, die ein Körper aufgrund von Bewegung besitzt, wird kinetische Energie genannt.
Wie bei der Definition von Energie im Allgemeinen können wir über kinetische Energie sagen, dass kinetische Energie die Fähigkeit eines sich bewegenden Körpers ist, Arbeit zu verrichten.
Finden wir die kinetische Energie eines Körpers der Masse $m$, der sich mit einer Geschwindigkeit von $υ$ bewegt. Da kinetische Energie die Energie aufgrund von Bewegung ist, ist der Nullzustand dafür der Zustand, in dem sich der Körper in Ruhe befindet. Nachdem wir die Arbeit gefunden haben, die notwendig ist, um dem Körper eine bestimmte Geschwindigkeit mitzuteilen, werden wir seine kinetische Energie finden.
Dazu berechnen wir die auf der Wegstrecke $∆r↖(→)$ geleistete Arbeit, wenn die Richtungen der Kraftvektoren $F↖(→)$ und Weg $∆r↖(→)$ übereinstimmen. In diesem Fall ist die Arbeit
wobei $∆x=∆r$

Für die Bewegung eines Punktes mit der Beschleunigung $α=const$ hat der Bewegungsausdruck die Form:
$∆x=υ_1t+(at^2)/(2),$
wobei $υ_1$ die Anfangsgeschwindigkeit ist.
Setzen wir den Ausdruck für $∆x$ von $∆x=υ_1t+(at^2)/(2)$ in die Gleichung $A=F ∆x$ ein und verwenden das zweite Newtonsche Gesetz $F=ma$, erhalten wir:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Ausdrücken der Beschleunigung in Form von $υ_1$ Anfangs- und $υ_2$ Endgeschwindigkeiten $a=(υ_2-υ_1)/(t)$ und Einsetzen in $A=ma(υ_1t+(at^2)/(2))=( mat)/ (2)(2υ_1+at)$ haben wir:
$A=(m(υ_2-υ_1))/(2) (2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Setzen wir nun die Anfangsgeschwindigkeit gleich Null: $υ_1=0$, erhalten wir einen Ausdruck für kinetische Energie:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Ein sich bewegender Körper hat also kinetische Energie. Diese Energie entspricht der Arbeit, die verrichtet werden muss, um die Geschwindigkeit des Körpers von Null auf $υ$ zu erhöhen.
Aus $E_K=(mυ)/(2)=(p^2)/(2m)$ folgt, dass die Arbeit einer Kraft, um einen Körper von einer Position zur anderen zu bewegen, gleich der Änderung der kinetischen Energie ist:
$A=E_(K_2)-E_(K_1)=∆E_K$
Die Gleichheit $A=E_(K_2)-E_(K_1)=∆E_K$ drückt aus Satz über die Änderung der kinetischen Energie.
Änderung der kinetischen Energie des Körpers(Stoffpunkt) für eine bestimmte Zeit ist gleich der Arbeit, die in dieser Zeit durch die auf den Körper einwirkende Kraft verrichtet wird.
Potenzielle Energie
Potenzielle Energie ist die Energie, die durch die gegenseitige Anordnung von wechselwirkenden Körpern oder Teilen desselben Körpers bestimmt wird.
Da Energie als die Fähigkeit eines Körpers definiert ist, Arbeit zu verrichten, wird potentielle Energie natürlich als die Arbeit einer Kraft definiert, die nur von der relativen Position der Körper abhängt. Dies ist die Schwerkraftarbeit $A=mgh_1-mgh_2=mgH$ und die Elastizitätsarbeit:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Die potentielle Energie des Körpers Wechselwirkung mit der Erde heißt der Wert gleich dem Produkt aus der Masse $m$ dieses Körpers und der Fallbeschleunigung $g$ und der Höhe $h$ des Körpers über der Erdoberfläche:
Die potentielle Energie eines elastisch verformten Körpers ist gleich dem halben Produkt aus dem Elastizitätskoeffizienten (Steifigkeit) $k$ des Körpers und dem Verformungsquadrat $∆l$:
$E_p=(1)/(2)k∆l^2$
Die Arbeit konservativer Kräfte (Schwerkraft und Elastizität) unter Berücksichtigung von $E_p=mgh$ und $E_p=(1)/(2)k∆l^2$ wird wie folgt ausgedrückt:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Diese Formel erlaubt uns, eine allgemeine Definition der potentiellen Energie zu geben.
Die potentielle Energie des Systems ist eine von der Position der Körper abhängige Größe, deren Änderung beim Übergang des Systems vom Anfangszustand in den Endzustand gleich der Arbeit der inneren konservativen Kräfte des Systems ist, mit umgekehrtem Vorzeichen aufgenommen.
Das Minuszeichen auf der rechten Seite der Gleichung $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ bedeutet, dass bei der Arbeit durch Schnittgrößen ( B. fallende Körper unter der Wirkung der Schwerkraft im "Stein-Erde"-System), nimmt die Energie des Systems ab. Arbeit und Änderung der potentiellen Energie in einem System haben immer entgegengesetzte Vorzeichen.
Da die Arbeit nur die Änderung der potentiellen Energie bestimmt, hat in der Mechanik nur die Energieänderung physikalische Bedeutung. Daher ist die Wahl des Nullenergieniveaus willkürlich und wird ausschließlich durch Bequemlichkeitserwägungen bestimmt, beispielsweise die Einfachheit des Schreibens der entsprechenden Gleichungen.
Das Gesetz der Veränderung und Erhaltung der mechanischen Energie
Gesamte mechanische Energie des Systems die Summe seiner kinetischen und potentiellen Energien heißt:
Sie wird durch die Position der Körper (potenzielle Energie) und ihre Geschwindigkeit (kinetische Energie) bestimmt.
Nach dem Satz über die kinetische Energie gilt
$E_k-E_(k_1)=A_p+A_(pr),$
wobei $А_р$ die Arbeit potentieller Kräfte ist, $А_(pr)$ die Arbeit nicht-potentieller Kräfte.
Die Arbeit der potentiellen Kräfte wiederum ist gleich der Differenz der potentiellen Energie des Körpers im Anfangszustand $E_(p_1)$ und im Endzustand $E_p$. Vor diesem Hintergrund erhalten wir einen Ausdruck für das Gesetz der Änderung der mechanischen Energie:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
wobei die linke Seite der Gleichheit die Änderung der gesamten mechanischen Energie und die rechte Seite die Arbeit nicht-potentieller Kräfte ist.
So, Gesetz der Änderung der mechanischen Energie liest:
Die Änderung der mechanischen Energie des Systems ist gleich der Arbeit aller nicht-potentiellen Kräfte.
Ein mechanisches System, in dem nur potentielle Kräfte wirken, nennt man konservativ.
In einem konservativen System ist $A_(pr) = 0$. dies impliziert Erhaltungssatz der mechanischen Energie:
In einem geschlossenen konservativen System bleibt die gesamte mechanische Energie erhalten (ändert sich nicht mit der Zeit):
$E_k+E_p=E_(k_1)+E_(p_1)$
Der Erhaltungssatz der mechanischen Energie leitet sich aus den Gesetzen der Newtonschen Mechanik ab, die auf ein System materieller Punkte (oder Makroteilchen) anwendbar sind.
Der Erhaltungssatz der mechanischen Energie gilt aber auch für ein System von Mikropartikeln, wo die Newtonschen Gesetze selbst nicht mehr gelten.
Der Erhaltungssatz der mechanischen Energie ist eine Folge der Homogenität der Zeit.
Einheitlichkeit der Zeit ist, dass bei gleichen Anfangsbedingungen der Ablauf physikalischer Prozesse nicht davon abhängt, in welchem Moment diese Bedingungen geschaffen werden.
Das Gesetz der Erhaltung der gesamten mechanischen Energie bedeutet, dass sich bei einer Änderung der kinetischen Energie in einem konservativen System auch seine potentielle Energie ändern muss, damit ihre Summe konstant bleibt. Darunter versteht man die Möglichkeit, eine Energieart in eine andere umzuwandeln.
Entsprechend den verschiedenen Bewegungsformen der Materie werden verschiedene Arten von Energie betrachtet: mechanisch, intern (gleich der Summe der kinetischen Energie der chaotischen Bewegung von Molekülen relativ zum Massenmittelpunkt des Körpers und der potentiellen Energie der Wechselwirkung von Molekülen untereinander), elektromagnetische, chemische (die aus der kinetischen Energie der Bewegung von Elektronen und elektrische Energie ihrer Wechselwirkung untereinander und mit Atomkernen besteht), Kernenergie usw. Es kann aus der gesehen werden Vorweg, dass die Aufteilung der Energie in verschiedene Arten ziemlich willkürlich ist.
Naturphänomene gehen in der Regel mit der Umwandlung einer Energieart in eine andere einher. So führt beispielsweise die Reibung von Teilen verschiedener Mechanismen zur Umwandlung mechanischer Energie in Wärme, d.h. in innere Energie. Bei Wärmekraftmaschinen hingegen wird innere Energie in mechanische Energie umgewandelt; in galvanischen zellen wird chemische energie in elektrische energie umgewandelt usw.
Derzeit ist der Energiebegriff einer der Grundbegriffe der Physik. Dieses Konzept ist untrennbar mit der Idee der Transformation einer Bewegungsform in eine andere verbunden.
So wird der Energiebegriff in der modernen Physik formuliert:
Energie ist ein allgemeines quantitatives Maß für die Bewegung und Wechselwirkung aller Arten von Materie. Energie entsteht nicht aus dem Nichts und verschwindet nicht, sie kann nur von einer Form in eine andere übergehen. Der Energiebegriff verbindet alle Phänomene der Natur.
einfache Mechanismen. Effizienz des Mechanismus
Einfache Mechanismen sind Geräte, die die Größe oder Richtung der auf den Körper ausgeübten Kräfte ändern.
Sie werden verwendet, um große Lasten mit geringem Kraftaufwand zu bewegen oder zu heben. Dazu gehören der Hebel und seine Varianten - Blöcke (beweglich und fest), ein Tor, eine schiefe Ebene und ihre Varianten - ein Keil, eine Schraube usw.
Hebelarm. Hebelregel
Der Hebel ist ein starrer Körper, der sich um einen festen Träger drehen kann.

Die Leverage-Regel besagt:
Ein Hebel befindet sich im Gleichgewicht, wenn die auf ihn wirkenden Kräfte umgekehrt proportional zu ihren Armen sind:
$(F_2)/(F_1)=(l_1)/(l_2)$
Aus der Formel $(F_2)/(F_1)=(l_1)/(l_2)$ unter Anwendung der Proportionseigenschaft (das Produkt der äußersten Terme des Anteils ist gleich dem Produkt seiner mittleren Terme), wir kann die folgende Formel erhalten:
Aber $F_1l_1=M_1$ ist das Kraftmoment, das dazu neigt, den Hebel im Uhrzeigersinn zu drehen, und $F_2l_2=M_2$ ist das Kraftmoment, das dazu neigt, den Hebel gegen den Uhrzeigersinn zu drehen. Also $M_1=M_2$, was zu beweisen war.
Der Hebel wurde schon in der Antike von Menschen benutzt. Mit seiner Hilfe war es möglich, beim Bau der Pyramiden im alten Ägypten schwere Steinplatten anzuheben. Ohne Leverage wäre dies nicht möglich gewesen. Tatsächlich wurden zum Beispiel für den Bau der Cheops-Pyramide, die eine Höhe von 147 $ m hat, mehr als zwei Millionen Steinblöcke verwendet, von denen der kleinste eine Masse von 2,5 $ Tonnen hatte!
Hebel sind heute sowohl in der Produktion (z. B. Kräne) als auch im Alltag (Scheren, Drahtschneider, Waagen) weit verbreitet.
Fester Block
Die Wirkungsweise eines festen Blocks ähnelt der Wirkungsweise eines Hebels mit gleicher Hebelwirkung: $l_1=l_2=r$. Die aufgebrachte Kraft $F_1$ ist gleich der Last $F_2$, und die Gleichgewichtsbedingung ist:
Fester Block Wird verwendet, wenn Sie die Richtung einer Kraft ändern müssen, ohne ihre Größe zu ändern.
Beweglicher Block
Der bewegliche Block wirkt ähnlich wie ein Hebel, dessen Arme sind: $l_2=(l_1)/(2)=r$. Die Gleichgewichtsbedingung hat in diesem Fall die Form:
wobei $F_1$ die aufgebrachte Kraft ist, $F_2$ die Last. Die Verwendung eines beweglichen Blocks führt zu einem doppelten Kraftgewinn.
Polyspast (Blocksystem)
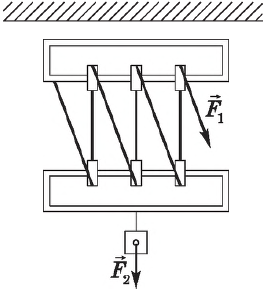
Ein gewöhnlicher Kettenzug besteht aus $n$ beweglichen und $n$ festen Blöcken. Die Anwendung ergibt einen Kraftgewinn von $2n$-mal:
$F_1=(F_2)/(2n)$
Kraftkettenzug besteht aus n beweglichen und einem festen Block. Die Verwendung eines Kettenzugs ergibt einen Kraftzuwachs von $2^n$ Mal:
$F_1=(F_2)/(2^n)$

Schraube
Die Schraube ist eine um die Achse gewickelte schiefe Ebene.

Die Bedingung für das Kräftegleichgewicht an der Schraube hat die Form:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

wobei $F_1$ eine externe Kraft ist, die auf die Schraube wirkt und in einem Abstand $R$ von ihrer Achse wirkt; $F_2$ ist die in Richtung der Schraubenachse wirkende Kraft; $h$ - Schraubensteigung; $r$ ist der durchschnittliche Gewinderadius; $α$ ist der Gewindewinkel. $R$ ist die Länge des Hebels (Schraubenschlüssels), der die Schraube mit der Kraft $F_1$ dreht.
Effizienz
Leistungskoeffizient (COP) - das Verhältnis der nützlichen Arbeit zur gesamten aufgewendeten Arbeit.
Die Effizienz wird oft in Prozent ausgedrückt und mit dem griechischen Buchstaben $η$ ("dies") bezeichnet:
$η=(A_p)/(A_3) 100%$
wobei $A_n$ nützliche Arbeit ist, $A_3$ die gesamte aufgewendete Arbeit.
Nutzarbeit ist immer nur ein Teil der Gesamtarbeit, die eine Person mit diesem oder jenem Mechanismus aufwendet.
Ein Teil der geleisteten Arbeit wird für die Überwindung der Reibungskräfte aufgewendet. Da $А_3 > А_п$, ist die Effizienz immer kleiner als $1$ (oder $< 100%$).
Da jede der Arbeiten in dieser Gleichung als Produkt aus der entsprechenden Kraft und dem zurückgelegten Weg ausgedrückt werden kann, kann sie wie folgt umgeschrieben werden: $F_1s_1≈F_2s_2$.
Daraus folgt, Wenn wir mit Hilfe des geltenden Mechanismus gewinnen, verlieren wir auf dem Weg die gleiche Anzahl von Malen und umgekehrt. Dieses Gesetz wird die goldene Regel der Mechanik genannt.
Die goldene Regel der Mechanik ist ein ungefähres Gesetz, da sie die Arbeit zur Überwindung von Reibung und Schwerkraft der Teile der verwendeten Geräte nicht berücksichtigt. Dennoch kann es sehr nützlich sein, wenn die Funktionsweise eines einfachen Mechanismus analysiert wird.

So können wir zum Beispiel dank dieser Regel sofort sagen, dass der in der Abbildung gezeigte Arbeiter mit einem doppelten Gewinn an Hubkraft von $ 10 $ cm das gegenüberliegende Ende des Hebels um $ 20 $ cm senken muss.
Kollision von Körpern. Elastische und unelastische Stöße
Zur Lösung des Problems der Bewegung von Körpern nach einer Kollision werden die Erhaltungssätze von Impuls und mechanischer Energie verwendet: Die bekannten Impulse und Energien vor der Kollision werden verwendet, um die Werte dieser Größen nach der Kollision zu bestimmen. Betrachten Sie die Fälle elastischer und unelastischer Stöße.
Es wird ein absolut unelastischer Stoß genannt, wonach die Körper einen einzigen Körper bilden, der sich mit einer bestimmten Geschwindigkeit bewegt. Das Problem der Geschwindigkeit des letzteren wird mit dem Impulserhaltungssatz für ein System von Körpern mit den Massen $m_1$ und $m_2$ (wenn es sich um zwei Körper handelt) vor und nach dem Stoß gelöst:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Offensichtlich bleibt die kinetische Energie von Körpern bei einem inelastischen Stoß nicht erhalten (z. B. bei $(υ_1)↖(→)=-(υ_2)↖(→)$ und $m_1=m_2$ wird sie nach dem gleich Null Einschlag).
Man spricht von einem absolut elastischen Stoß, bei dem nicht nur die Summe der Impulse erhalten bleibt, sondern auch die Summe der kinetischen Energien der kollidierenden Körper.
Für einen absolut elastischen Stoß gelten die Gleichungen
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2 )^2)/(2)$
wobei $m_1, m_2$ die Massen der Kugeln, $υ_1, υ_2$ die Geschwindigkeiten der Kugeln vor dem Aufprall, $υ"_1, υ"_2$ die Geschwindigkeiten der Kugeln nach dem Aufprall sind.
