एक सामान्य उत्पत्ति (मूल) और लंबाई की एक सामान्य इकाई के साथ एक दूसरे के लंबवत दो या तीन प्रतिच्छेदन अक्षों की एक क्रमबद्ध प्रणाली कहलाती है आयताकार कार्टेशियन समन्वय प्रणाली .
सामान्य कार्टेशियन समन्वय प्रणाली (एफ़िन समन्वय प्रणाली) में आवश्यक रूप से लंबवत अक्ष भी शामिल नहीं हो सकते हैं। फ्रांसीसी गणितज्ञ रेने डेसकार्टेस (1596-1662) के सम्मान में, एक ऐसी समन्वय प्रणाली का नाम दिया गया है जिसमें लंबाई की एक सामान्य इकाई को सभी अक्षों पर गिना जाता है और कुल्हाड़ियां सीधी होती हैं।
समतल पर आयताकार कार्टेशियन समन्वय प्रणाली दो अक्ष हैं अंतरिक्ष में आयताकार कार्टेशियन समन्वय प्रणाली - तीन कुल्हाड़ियों। एक विमान या अंतरिक्ष में प्रत्येक बिंदु निर्देशांक के एक आदेशित सेट द्वारा निर्धारित किया जाता है - समन्वय प्रणाली की इकाई लंबाई के अनुसार संख्याएं।
ध्यान दें, जैसा कि परिभाषा से निम्नानुसार है, एक सीधी रेखा पर एक कार्टेशियन समन्वय प्रणाली है, जो कि एक आयाम में है। एक सीधी रेखा पर कार्तीय निर्देशांक की शुरूआत उन तरीकों में से एक है जिसमें एक सीधी रेखा पर किसी भी बिंदु को एक अच्छी तरह से परिभाषित वास्तविक संख्या, यानी एक निर्देशांक निर्दिष्ट किया जाता है।
निर्देशांक की विधि, जो रेने डेसकार्टेस के कार्यों में उत्पन्न हुई, ने सभी गणित के क्रांतिकारी पुनर्गठन को चिह्नित किया। ज्यामितीय छवियों (ग्राफ) के रूप में बीजीय समीकरणों (या असमानताओं) की व्याख्या करना और इसके विपरीत, विश्लेषणात्मक सूत्रों, समीकरणों की प्रणालियों का उपयोग करके ज्यामितीय समस्याओं के समाधान की खोज करना संभव हो गया। हाँ, असमानता जेड < 3 геометрически означает полупространство, лежащее ниже плоскости, параллельной координатной плоскости xOyऔर इस विमान के ऊपर 3 इकाइयों द्वारा स्थित है।
कार्तीय निर्देशांक प्रणाली की सहायता से, किसी बिंदु का दिए गए वक्र से संबंध इस तथ्य से मेल खाता है कि संख्याएं एक्सतथा आपकुछ समीकरण संतुष्ट करें। तो, किसी दिए गए बिंदु पर केंद्रित वृत्त के एक बिंदु के निर्देशांक ( एक; बी) समीकरण को संतुष्ट करें (एक्स - एक)² + ( आप - बी)² = आर² .
समतल पर आयताकार कार्टेशियन समन्वय प्रणाली
एक समान मूल और समान पैमाने की इकाई के साथ एक समतल पर दो लंबवत कुल्हाड़ियाँ विमान पर कार्तीय समन्वय प्रणाली . इन अक्षों में से एक को अक्ष कहा जाता है बैल, या X- अक्ष , अन्य - अक्ष ओए, या शाफ़्ट . इन अक्षों को निर्देशांक अक्ष भी कहा जाता है। द्वारा निरूपित करें एमएक्सतथा एमआपक्रमशः एक मनमाना बिंदु का प्रक्षेपण एमधुरी पर बैलतथा ओए. अनुमान कैसे प्राप्त करें? बिंदु से गुजरें एम बैल. यह रेखा अक्ष को काटती है बैलबिंदु पर एमएक्स. बिंदु से गुजरें एमअक्ष के लंबवत सीधी रेखा ओए. यह रेखा अक्ष को काटती है ओएबिंदु पर एमआप. यह नीचे दिए गए चित्र में दिखाया गया है।
एक्सतथा आपअंक एमहम क्रमशः निर्देशित खंडों के परिमाण को बुलाएंगे ओएमएक्सतथा ओएमआप. इन दिशात्मक खंडों के मूल्यों की गणना क्रमशः की जाती है एक्स = एक्स0 - 0 तथा आप = आप0 - 0 . कार्तीय निर्देशांक एक्सतथा आपअंक एम सूच्याकार आकृति का भुज तथा तालमेल . तथ्य यह है कि डॉट एमनिर्देशांक हैं एक्सतथा आप, निम्नानुसार दर्शाया गया है: एम(एक्स, आप) .
निर्देशांक अक्ष विमान को चार . में विभाजित करते हैं वृत्त का चतुर्थ भाग , जिसका क्रमांक नीचे चित्र में दिखाया गया है। यह एक या दूसरे चतुर्थांश में उनके स्थान के आधार पर, बिंदुओं के निर्देशांक के लिए संकेतों की व्यवस्था को भी इंगित करता है।
समतल में कार्टेशियन आयताकार निर्देशांक के अलावा, ध्रुवीय समन्वय प्रणाली को भी अक्सर माना जाता है। एक समन्वय प्रणाली से दूसरे में संक्रमण की विधि के बारे में - पाठ में ध्रुवीय समन्वय प्रणाली .

अंतरिक्ष में आयताकार कार्टेशियन समन्वय प्रणाली
अंतरिक्ष में कार्टेशियन निर्देशांक एक विमान पर कार्टेशियन निर्देशांक के साथ पूर्ण सादृश्य में पेश किए जाते हैं।
एक सामान्य मूल के साथ अंतरिक्ष में तीन परस्पर लंबवत कुल्हाड़ियों (निर्देशांक कुल्हाड़ियों) हेऔर एक ही पैमाने की इकाई रूप अंतरिक्ष में कार्तीय आयताकार समन्वय प्रणाली .
इन अक्षों में से एक को अक्ष कहा जाता है बैल, या X- अक्ष , अन्य - अक्ष ओए, या शाफ़्ट , तीसरा - अक्ष आउंस, या अनुप्रयुक्त अक्ष . होने देना एमएक्स, एमआप एमजेड- एक मनमाना बिंदु के अनुमान एमअक्ष पर रिक्त स्थान बैल , ओएतथा आउंसक्रमश।
बिंदु से गुजरें एम बैलबैलबिंदु पर एमएक्स. बिंदु से गुजरें एमअक्ष के लंबवत समतल ओए. यह तल अक्ष को काटता है ओएबिंदु पर एमआप. बिंदु से गुजरें एमअक्ष के लंबवत समतल आउंस. यह तल अक्ष को काटता है आउंसबिंदु पर एमजेड.

कार्तीय आयताकार निर्देशांक एक्स , आपतथा जेडअंक एमहम क्रमशः निर्देशित खंडों के परिमाण को बुलाएंगे ओएमएक्स, ओएमआपतथा ओएमजेड. इन दिशात्मक खंडों के मूल्यों की गणना क्रमशः की जाती है एक्स = एक्स0 - 0 , आप = आप0 - 0 तथा जेड = जेड0 - 0 .
कार्तीय निर्देशांक एक्स , आपतथा जेडअंक एमतदनुसार नामित हैं सूच्याकार आकृति का भुज , तालमेल तथा पिपली .
जोड़े में लिया गया, समन्वय अक्ष समन्वय विमानों में स्थित हैं xOy , योज़तथा zOx .
कार्तीय समन्वय प्रणाली में बिंदुओं के बारे में समस्याएं
उदाहरण 1
ए(2; -3) ;
बी(3; -1) ;
सी(-5; 1) .
x-अक्ष पर इन बिंदुओं के प्रक्षेपणों के निर्देशांक ज्ञात कीजिए।
समाधान। इस पाठ के सैद्धांतिक भाग के अनुसार, x-अक्ष पर एक बिंदु का प्रक्षेपण x-अक्ष पर ही स्थित है, अर्थात अक्ष बैल, और इसलिए बिंदु के भुज के बराबर एक भुज है, और एक निर्देशांक (अक्ष पर निर्देशांक) ओए, जिसे x-अक्ष बिंदु 0 पर प्रतिच्छेद करता है), शून्य के बराबर। तो हमें x-अक्ष पर इन बिंदुओं के निम्नलिखित निर्देशांक प्राप्त होते हैं:
एएक्स(2;0);
बीएक्स(3;0);
सीएक्स(-5;0).
उदाहरण 2विमान पर कार्तीय समन्वय प्रणाली में अंक दिए गए हैं
ए(-3; 2) ;
बी(-5; 1) ;
सी(3; -2) .
y-अक्ष पर इन बिंदुओं के प्रक्षेपणों के निर्देशांक ज्ञात कीजिए।
समाधान। इस पाठ के सैद्धांतिक भाग के अनुसार, y-अक्ष पर एक बिंदु का प्रक्षेपण y-अक्ष पर ही स्थित है, अर्थात अक्ष ओए, और इसलिए बिंदु के कोटि के बराबर एक कोटि है, और एक एब्सिस्सा (अक्ष पर निर्देशांक) बैल, जिसे y-अक्ष बिंदु 0 पर प्रतिच्छेद करता है), शून्य के बराबर। तो हमें y-अक्ष पर इन बिंदुओं के निम्नलिखित निर्देशांक प्राप्त होते हैं:
एवाई(0; 2);
बीवाई (0; 1);
सीवाई(0;-2).
उदाहरण 3विमान पर कार्तीय समन्वय प्रणाली में अंक दिए गए हैं
ए(2; 3) ;
बी(-3; 2) ;
सी(-1; -1) .
बैल .
बैल बैल बैल, दिए गए बिंदु के समान भुज होगा, और कोटि दिए गए बिंदु की कोटि के निरपेक्ष मान के बराबर होगी, और इसके विपरीत चिह्न होगा। तो हम अक्ष के बारे में इन बिंदुओं के सममित बिंदुओं के निम्नलिखित निर्देशांक प्राप्त करते हैं बैल :
ए"(2; -3) ;
बी"(-3; -2) ;
सी"(-1; 1) .
कार्टेशियन समन्वय प्रणाली की समस्याओं को स्वयं हल करें, और फिर समाधान देखें
उदाहरण 4निर्धारित करें कि किस क्वाड्रंट्स (क्वार्टर, क्वाड्रंट्स के साथ फिगर - पैराग्राफ के अंत में "आयताकार कार्टेशियन कोऑर्डिनेट सिस्टम ऑन प्लेन") बिंदु स्थित हो सकता है एम(एक्स; आप) , यदि
1) xy > 0 ;
2) xy < 0 ;
3) एक्स − आप = 0 ;
4) एक्स + आप = 0 ;
5) एक्स + आप > 0 ;
6) एक्स + आप < 0 ;
7) एक्स − आप > 0 ;
8) एक्स − आप < 0 .
उदाहरण 5विमान पर कार्तीय समन्वय प्रणाली में अंक दिए गए हैं
ए(-2; 5) ;
बी(3; -5) ;
सी(एक; बी) .
अक्ष के बारे में इन बिंदुओं के सममित बिंदुओं के निर्देशांक खोजें ओए .
हम एक साथ समस्याओं को हल करना जारी रखते हैं
उदाहरण 6विमान पर कार्तीय समन्वय प्रणाली में अंक दिए गए हैं
ए(-1; 2) ;
बी(3; -1) ;
सी(-2; -2) .
अक्ष के बारे में इन बिंदुओं के सममित बिंदुओं के निर्देशांक खोजें ओए .
समाधान। अक्ष के चारों ओर 180 डिग्री घुमाएँ ओएएक अक्ष से निर्देशित रेखा खंड ओएयहां तक। चित्र में, जहाँ समतल के चतुर्थांश दर्शाए गए हैं, हम देखते हैं कि अक्ष के संबंध में बिंदु सममित है ओए, दिए गए बिंदु के समान कोटि होगी, और दिए गए बिंदु के भुज के निरपेक्ष मान के बराबर एक भुज, और इसके विपरीत चिह्न होगा। तो हम अक्ष के बारे में इन बिंदुओं के सममित बिंदुओं के निम्नलिखित निर्देशांक प्राप्त करते हैं ओए :
ए"(1; 2) ;
बी"(-3; -1) ;
सी"(2; -2) .
उदाहरण 7विमान पर कार्तीय समन्वय प्रणाली में अंक दिए गए हैं
ए(3; 3) ;
बी(2; -4) ;
सी(-2; 1) .
उन बिन्दुओं के निर्देशांक ज्ञात कीजिए जो मूल बिन्दु के सन्दर्भ में इन बिन्दुओं के सममित हैं।
समाधान। हम मूल से दिए गए बिंदु तक जाने वाले निर्देशित खंड के मूल के चारों ओर 180 डिग्री घुमाते हैं। चित्र में, जहां समतल के चतुर्थांश दर्शाए गए हैं, हम देखते हैं कि निर्देशांक की उत्पत्ति के संबंध में किसी दिए गए बिंदु के सममित बिंदु में एक भुज और दिए गए बिंदु के एब्सिस्सा और कोर्डिनेट के निरपेक्ष मान के बराबर एक कोटि होगी। , लेकिन उनके संकेत के विपरीत। तो हम मूल के संबंध में इन बिंदुओं के सममित बिंदुओं के निम्नलिखित निर्देशांक प्राप्त करते हैं:
ए"(-3; -3) ;
बी"(-2; 4) ;
सी(2; -1) .
उदाहरण 8
ए(4; 3; 5) ;
बी(-3; 2; 1) ;
सी(2; -3; 0) .
इन बिंदुओं के अनुमानों के निर्देशांक खोजें:
1) हवाई जहाज़ पर ऑक्सी ;
2) विमान के लिए ऑक्सज़ू ;
3) विमान के लिए ओयज़ू ;
4) भुज अक्ष पर;
5) y-अक्ष पर;
6) पिपली अक्ष पर।
1) एक बिंदु का समतल पर प्रक्षेपण ऑक्सीइस विमान पर ही स्थित है, और इसलिए एक एब्सिस्सा है और दिए गए बिंदु के एब्सिस्सा और कोर्डिनेट के बराबर है, और एक एप्लीकेट शून्य के बराबर है। तो हमें इन बिंदुओं के अनुमानों के निम्नलिखित निर्देशांक मिलते हैं ऑक्सी :
एxy(4;3;0);
बीxy (-3; 2; 0);
सीxy(2;-3;0).
2) एक समतल पर एक बिंदु का प्रक्षेपण ऑक्सज़ूइस विमान पर ही स्थित है, और इसलिए एक एब्सिस्सा है और दिए गए बिंदु के एब्सिस्सा और एप्लीकेट के बराबर है, और एक कोटि शून्य के बराबर है। तो हमें इन बिंदुओं के अनुमानों के निम्नलिखित निर्देशांक मिलते हैं ऑक्सज़ू :
एxz (4; 0; 5);
बीxz (-3; 0; 1);
सीxz(2;0;0).
3) एक बिंदु का समतल पर प्रक्षेपण ओयज़ूइस तल पर ही स्थित है, और इसलिए किसी दिए गए बिंदु के कोटि और अनुप्रस्थ के बराबर एक कोटि और एक अनुप्रस्थ है, और एक भुज शून्य के बराबर है। तो हमें इन बिंदुओं के अनुमानों के निम्नलिखित निर्देशांक मिलते हैं ओयज़ू :
एyz (0; 3; 5);
बीyz (0; 2; 1);
सीyz(0;-3;0).
4) इस पाठ के सैद्धांतिक भाग से निम्नानुसार है, एक्स-अक्ष पर एक बिंदु का प्रक्षेपण एक्स-अक्ष पर ही स्थित है, अर्थात अक्ष बैल, और इसलिए बिंदु के भुज के बराबर एक भुज होता है, और प्रक्षेपण की कोटि और अनुप्रस्थ शून्य के बराबर होते हैं (चूंकि निर्देशांक और अनुप्रयुक्त कुल्हाड़ियां भुज को बिंदु 0 पर प्रतिच्छेद करती हैं)। हमें x-अक्ष पर इन बिंदुओं के अनुमानों के निम्नलिखित निर्देशांक प्राप्त होते हैं:
एएक्स(4;0;0);
बीएक्स(-3;0;0);
सीएक्स(2;0;0).
5) y-अक्ष पर एक बिंदु का प्रक्षेपण y-अक्ष पर ही स्थित होता है, अर्थात अक्ष ओए, और इसलिए बिंदु के कोटि के बराबर एक कोटि है, और एब्सिस्सा और प्रोजेक्शन का एप्लिकेट शून्य के बराबर है (चूंकि एब्सिस्सा और एप्लिकेट अक्ष, कोटि अक्ष को बिंदु 0 पर प्रतिच्छेद करते हैं)। हमें y-अक्ष पर इन बिंदुओं के अनुमानों के निम्नलिखित निर्देशांक प्राप्त होते हैं:
एवाई(0;3;0);
बीवाई(0;2;0);
सीवाई(0;-3;0).
6) अनुप्रयुक्त अक्ष पर एक बिंदु का प्रक्षेपण अनुप्रयुक्त अक्ष पर ही स्थित होता है, अर्थात अक्ष आउंस, और इसलिए बिंदु के अनुप्रयुक्त के बराबर एक अनुप्रयोग है, और प्रक्षेपण के भुज और निर्देशांक शून्य के बराबर हैं (चूंकि भुज और निर्देशांक अक्ष अनुप्रयुक्त अक्ष को बिंदु 0 पर प्रतिच्छेद करते हैं)। हम अनुप्रयुक्त अक्ष पर इन बिंदुओं के अनुमानों के निम्नलिखित निर्देशांक प्राप्त करते हैं:
एजेड(0; 0; 5);
बीजेड(0;0;1);
सीजेड (0; 0; 0).
उदाहरण 9अंतरिक्ष में कार्तीय निर्देशांक प्रणाली में अंक दिए गए हैं
ए(2; 3; 1) ;
बी(5; -3; 2) ;
सी(-3; 2; -1) .
उन बिंदुओं के निर्देशांक ज्ञात कीजिए जो इन बिंदुओं के संबंध में सममित हैं:
1) प्लेन ऑक्सी ;
2) विमान ऑक्सज़ू ;
3) विमान ओयज़ू ;
4) एब्सिस्सा अक्ष;
5) वाई-अक्ष;
6) पिपली अक्ष;
7) निर्देशांक की उत्पत्ति।
1) अक्ष के दूसरी ओर स्थित बिंदु को "अग्रिम" करें ऑक्सी ऑक्सी, में एक एब्सिस्सा और एक कोर्डिनेट होगा जो दिए गए बिंदु के एब्सिस्सा और कोर्डिनेट के बराबर होगा, और एक एप्लीकेट परिमाण में दिए गए बिंदु के एप्लीकेट के बराबर होगा, लेकिन इसके विपरीत साइन इन होगा। तो, हमें विमान के संबंध में डेटा के सममित बिंदुओं के निम्नलिखित निर्देशांक मिलते हैं ऑक्सी :
ए"(2; 3; -1) ;
बी"(5; -3; -2) ;
सी"(-3; 2; 1) .
2) अक्ष के दूसरी ओर स्थित बिंदु को "अग्रिम" करें ऑक्सज़ूउसी दूरी के लिए। निर्देशांक स्थान को प्रदर्शित करने वाली आकृति के अनुसार, हम देखते हैं कि अक्ष के संबंध में बिंदु सममित है ऑक्सज़ू, में एक एब्सिस्सा होगा और दिए गए बिंदु के एब्सिस्सा और एप्लीकेट के बराबर होगा, और दिए गए बिंदु के कोटि के परिमाण के बराबर एक कोर्डिनेट होगा, लेकिन इसके विपरीत साइन इन होगा। तो, हमें विमान के संबंध में डेटा के सममित बिंदुओं के निम्नलिखित निर्देशांक मिलते हैं ऑक्सज़ू :
ए"(2; -3; 1) ;
बी"(5; 3; 2) ;
सी"(-3; -2; -1) .
3) अक्ष के दूसरी ओर स्थित बिंदु को "अग्रिम" करें ओयज़ूउसी दूरी के लिए। निर्देशांक स्थान को प्रदर्शित करने वाली आकृति के अनुसार, हम देखते हैं कि अक्ष के संबंध में बिंदु सममित है ओयज़ू, में दिए गए बिंदु के कोर्डिनेट और एप्लीकेट के बराबर एक कोर्डिनेट और एक एप्लीकेट होगा, और दिए गए बिंदु के एब्सिस्सा के परिमाण के बराबर एक एब्सिसा होगा, लेकिन इसके विपरीत साइन इन होगा। तो, हमें विमान के संबंध में डेटा के सममित बिंदुओं के निम्नलिखित निर्देशांक मिलते हैं ओयज़ू :
ए"(-2; 3; 1) ;
बी"(-5; -3; 2) ;
सी"(3; 2; -1) .
समतल पर सममित बिंदुओं के अनुरूप और विमानों के संबंध में डेटा के सममित अंतरिक्ष में बिंदुओं के साथ, हम ध्यान दें कि अंतरिक्ष में कार्टेशियन समन्वय प्रणाली के कुछ अक्ष के बारे में समरूपता के मामले में, उस अक्ष पर समन्वय जिसके बारे में समरूपता सेट है अपना चिह्न बनाए रखेगा, और अन्य दो अक्षों पर निर्देशांक दिए गए बिंदु के निर्देशांक के समान निरपेक्ष मान में होंगे, लेकिन संकेत में विपरीत होंगे।
4) भुज अपना चिन्ह बनाए रखेगा, जबकि कोर्डिनेट और अनुप्रयुक्त संकेत बदलेंगे। तो, हम x-अक्ष के बारे में डेटा के सममित बिंदुओं के निम्नलिखित निर्देशांक प्राप्त करते हैं:
ए"(2; -3; -1) ;
बी"(5; 3; -2) ;
सी"(-3; -2; 1) .
5) कोर्डिनेट अपना चिन्ह बनाए रखेगा, जबकि भुज और अनुप्रयुक्त संकेत बदलेंगे। तो, हम y-अक्ष के बारे में डेटा के सममित बिंदुओं के निम्नलिखित निर्देशांक प्राप्त करते हैं:
ए"(-2; 3; -1) ;
बी"(-5; -3; -2) ;
सी"(3; 2; 1) .
6) एप्लीकेट अपने चिन्ह को बनाए रखेगा, और एब्सिस्सा और कोर्डिनेट संकेतों को बदल देगा। इसलिए, हम एप्लिकेट अक्ष के बारे में डेटा के सममित बिंदुओं के निम्नलिखित निर्देशांक प्राप्त करते हैं:
ए"(-2; -3; 1) ;
बी"(-5; 3; 2) ;
सी"(3; -2; -1) .
7) समतल पर बिंदुओं के मामले में समरूपता के अनुरूप, निर्देशांक की उत्पत्ति के बारे में समरूपता के मामले में, किसी दिए गए बिंदु के सममित बिंदु के सभी निर्देशांक किसी दिए गए बिंदु के निर्देशांक के निरपेक्ष मान के बराबर होंगे, लेकिन उनके संकेत के विपरीत। इसलिए, हमें बिंदुओं के निम्नलिखित निर्देशांक प्राप्त होते हैं जो मूल के संबंध में डेटा के सममित होते हैं।
परिभाषा 1। संख्यात्मक अक्ष ( संख्या रेखा, समन्वय रेखा) ऑक्स को एक सीधी रेखा कहा जाता है जिस पर बिंदु O चुना जाता है संदर्भ बिंदु (निर्देशांक की उत्पत्ति)(अंजीर। 1), दिशा
हे → एक्स
के रूप में सूचीबद्ध सकारात्मक दिशाऔर एक खंड को चिह्नित किया जाता है, जिसकी लंबाई के रूप में लिया जाता है लंबाई की इकाई.

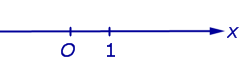
परिभाषा 2. जिस खंड की लंबाई को लंबाई की इकाई के रूप में लिया जाता है, उसे पैमाना कहा जाता है।
संख्यात्मक अक्ष के प्रत्येक बिंदु का एक निर्देशांक होता है, जो एक वास्तविक संख्या होती है। बिंदु O का निर्देशांक शून्य के बराबर है। किरण ऑक्स पर स्थित एक मनमाना बिंदु A का निर्देशांक खंड OA की लंबाई के बराबर है। संख्यात्मक अक्ष के एक मनमाना बिंदु A का निर्देशांक, जो किरण ऑक्स पर नहीं है, ऋणात्मक है, और निरपेक्ष मान में यह खंड OA की लंबाई के बराबर है।
परिभाषा 3. विमान पर आयताकार कार्टेशियन समन्वय प्रणाली ऑक्सीदोनों को परस्पर बुलाओ सीधासंख्यात्मक अक्षों के साथ ऑक्स और ओए एक ही पैमानातथा सामान्य उत्पत्तिइसके अलावा, बिंदु ओ पर, जैसे कि किरण ऑक्स से 90 डिग्री के कोण के माध्यम से किरण ओए तक घूर्णन दिशा में किया जाता है वामा व्रत(रेखा चित्र नम्बर 2)।


टिप्पणी । चित्र 2 में दर्शाए गए आयताकार कार्टेशियन समन्वय प्रणाली ऑक्सी को कहा जाता है सही समन्वय प्रणाली, विपरीत वाम समन्वय प्रणाली, जिसमें बीम ओए से 90 डिग्री के कोण पर बीम ऑक्स का घूर्णन दक्षिणावर्त दिशा में किया जाता है। इस गाइड में, हम केवल सही समन्वय प्रणाली पर विचार करेंविशेष रूप से इसका उल्लेख किए बिना।
यदि हम समतल पर आयताकार कार्टेशियन निर्देशांक ऑक्सी की कुछ प्रणाली पेश करते हैं, तो विमान का प्रत्येक बिंदु प्राप्त करेगा दो निर्देशांक – सूच्याकार आकृति का भुजतथा तालमेलहैं, जिनकी गणना निम्न प्रकार से की जाती है। मान लीजिए A समतल का एक मनमाना बिंदु है। आइए हम बिंदु A से लंबों को छोड़ते हैं आ 1 और आ 2 से क्रमशः ऑक्स और ओए की रेखाएँ, (चित्र 3)।
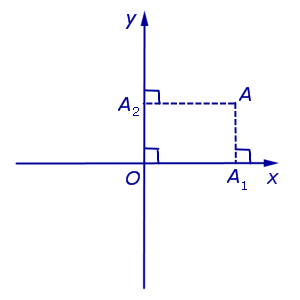

परिभाषा 4. बिंदु A का भुज बिंदु का निर्देशांक है ए 1 संख्यात्मक अक्ष ऑक्स पर, बिंदु A की कोटि बिंदु का निर्देशांक है ए 2 अंकीय अक्ष पर ओए।
पद । एक बिंदु के निर्देशांक (भुज और निर्देशांक) A आयताकार कार्टेशियन निर्देशांक प्रणाली में ऑक्सी (चित्र 4) को आमतौर पर निरूपित किया जाता है ए(एक्स;आप) या ए = (एक्स; आप).
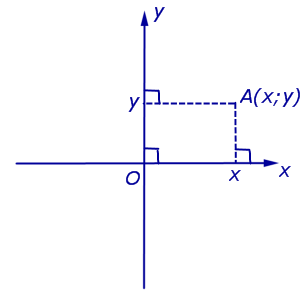

टिप्पणी । प्वाइंट ओ, कहा जाता है मूल, निर्देशांक हैं हे(0 ; 0) .
परिभाषा 5. आयताकार कार्टेशियन समन्वय प्रणाली ऑक्सी में, ऑक्स संख्यात्मक अक्ष को भुज अक्ष कहा जाता है, और ओए संख्यात्मक अक्ष को समन्वय अक्ष (चित्र 5) कहा जाता है।
परिभाषा 6. प्रत्येक आयताकार कार्टेशियन समन्वय प्रणाली विमान को 4 तिमाहियों में विभाजित करती है ( चतुर्भुज), जिसकी संख्या चित्र 5 में दिखाई गई है।


परिभाषा 7. वह तल जिस पर एक आयताकार कार्तीय निर्देशांक प्रणाली दी गई हो, कहलाती है कार्तिकये निर्देशांक.
टिप्पणी । भुज अक्ष को निर्देशांक तल पर समीकरण द्वारा दिया जाता है आप= 0, निर्देशांक तल पर y-अक्ष समीकरण द्वारा दिया गया है एक्स = 0.
कथन 1। दो बिंदुओं के बीच की दूरीकार्तिकये निर्देशांक
ए 1 (एक्स 1 ;आप 1) तथा ए 2 (एक्स 2 ;आप 2)
गणना सूत्र के अनुसार
सबूत । चित्र 6 पर विचार करें।

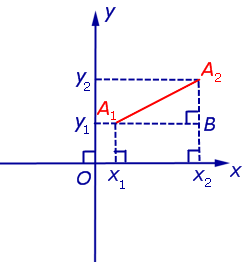
| |ए 1 ए 2 | 2 = = (एक्स 2 -एक्स 1) 2 + (आप 2 -आप 1) 2 . | (1) |
फलस्वरूप,
क्यू.ई.डी.
निर्देशांक तल पर वृत्त का समीकरण
निर्देशांक तल ऑक्सी पर विचार करें (चित्र 7) त्रिज्या R का एक वृत्त जो बिंदु पर केंद्रित है ए 0 (एक्स 0 ;आप 0) .
एक समतल पर एक आयताकार समन्वय प्रणाली दो परस्पर लंबवत समन्वय अक्षों X'X और Y'Y द्वारा बनाई गई है। निर्देशांक अक्ष बिंदु O पर प्रतिच्छेद करते हैं, जिसे निर्देशांक का मूल कहा जाता है, प्रत्येक अक्ष पर एक सकारात्मक दिशा चुनी जाती है। कुल्हाड़ियों की सकारात्मक दिशा (दाएं हाथ की समन्वय प्रणाली में) को चुना जाता है ताकि जब X'X अक्ष हो 90 ° से वामावर्त घुमाया जाता है, इसकी सकारात्मक दिशा Y'Y अक्ष की सकारात्मक दिशा से मेल खाती है। X'X और Y'Y निर्देशांक अक्षों द्वारा निर्मित चार कोणों (I, II, III, IV) को निर्देशांक कोण कहा जाता है (चित्र 1 देखें)।
समतल पर बिंदु A की स्थिति दो निर्देशांक x और y द्वारा निर्धारित की जाती है। x-निर्देशांक OB खंड की लंबाई के बराबर है, y-निर्देशांक चयनित इकाइयों में OC खंड की लंबाई है। खंड OB और OC क्रमशः Y'Y और X'X अक्षों के समानांतर बिंदु A से खींची गई रेखाओं द्वारा परिभाषित होते हैं। x निर्देशांक को बिंदु A का भुज कहा जाता है, y निर्देशांक को बिंदु A की कोटि कहा जाता है। वे इसे इस प्रकार लिखते हैं: A (x, y)।
यदि बिंदु A निर्देशांक कोण I में स्थित है, तो बिंदु A में धनात्मक भुज और कोटि है। यदि बिंदु A निर्देशांक कोण II में स्थित है, तो बिंदु A का एक ऋणात्मक भुज और एक धनात्मक कोटि है। यदि बिंदु A निर्देशांक कोण III में स्थित है, तो बिंदु A में ऋणात्मक भुज और कोटि है। यदि बिंदु A निर्देशांक कोण IV में स्थित है, तो बिंदु A में एक धनात्मक भुज और एक ऋणात्मक कोटि है।
अंतरिक्ष में आयताकार समन्वय प्रणालीतीन परस्पर लंबवत समन्वय अक्षों OX, OY और OZ द्वारा बनता है। निर्देशांक अक्ष बिंदु O पर प्रतिच्छेद करते हैं, जिसे मूल कहा जाता है, प्रत्येक अक्ष पर तीरों द्वारा इंगित सकारात्मक दिशा को चुना जाता है, और अक्षों पर खंडों के मापन की इकाई का चयन किया जाता है। माप की इकाइयाँ सभी अक्षों के लिए समान होती हैं। OX - भुज अक्ष, OY - निर्देशांक अक्ष, OZ - अनुप्रयुक्त अक्ष। कुल्हाड़ियों की सकारात्मक दिशा को चुना जाता है ताकि जब ओएक्स अक्ष को 90 डिग्री से वामावर्त घुमाया जाए, तो इसकी सकारात्मक दिशा ओए अक्ष की सकारात्मक दिशा के साथ मेल खाती है, यदि यह रोटेशन ओजेड अक्ष की सकारात्मक दिशा से देखा जाता है। ऐसी समन्वय प्रणाली को सही कहा जाता है। यदि दाहिने हाथ के अंगूठे को X दिशा के रूप में, तर्जनी को Y दिशा के रूप में और मध्यमा को Z दिशा के रूप में लिया जाए, तो एक सही समन्वय प्रणाली का निर्माण होता है। बाएं हाथ की समान उंगलियां बाएं समन्वय प्रणाली बनाती हैं। दाएं और बाएं समन्वय प्रणालियों को जोड़ा नहीं जा सकता है ताकि संबंधित कुल्हाड़ियों का संयोग हो (चित्र 2 देखें)।

अंतरिक्ष में बिंदु A की स्थिति तीन निर्देशांक x, y और z द्वारा निर्धारित की जाती है। x निर्देशांक खंड OB की लंबाई के बराबर है, y निर्देशांक खंड OC की लंबाई के बराबर है, z निर्देशांक चयनित इकाइयों में खंड OD की लंबाई है। खंड OB, OC और OD को क्रमशः YOZ, XOZ और XOY के समांतर बिंदु A से खींचे गए विमानों द्वारा परिभाषित किया गया है। x निर्देशांक को बिंदु A का भुज कहा जाता है, y निर्देशांक को बिंदु A की कोटि कहा जाता है, z निर्देशांक को बिंदु A का अनुप्रस्थ कहा जाता है। वे इसे इस प्रकार लिखते हैं: A (a, b, c)।
हॉर्ट्स
एक आयताकार समन्वय प्रणाली (किसी भी आयाम की) को ऑर्ट्स के एक सेट द्वारा भी वर्णित किया जाता है, जो समन्वय अक्षों के साथ सह-निर्देशित होता है। ऑर्ट्स की संख्या समन्वय प्रणाली के आयाम के बराबर है, और वे सभी एक दूसरे के लंबवत हैं।
त्रि-आयामी मामले में, ऐसे वैक्टर आमतौर पर निरूपित होते हैं मैं जे कया इएक्स इआप इजेड. इस मामले में, सही समन्वय प्रणाली के मामले में, वैक्टर के वेक्टर उत्पाद के साथ निम्नलिखित सूत्र मान्य हैं:
- [मैं जे]=क ;
- [जे क]=मैं ;
- [क मैं]=जे .
कहानी
रेने डेसकार्टेस ने 1637 में विधि पर अपने प्रवचन में एक आयताकार समन्वय प्रणाली की शुरुआत की थी। इसलिए, आयताकार निर्देशांक प्रणाली को भी कहा जाता है - कार्तीय समन्वय प्रणाली. ज्यामितीय वस्तुओं का वर्णन करने के लिए समन्वय विधि ने विश्लेषणात्मक ज्यामिति की नींव रखी। पियरे फ़र्मेट ने भी समन्वय पद्धति के विकास में योगदान दिया, लेकिन उनका काम उनकी मृत्यु के बाद पहली बार प्रकाशित हुआ था। डेसकार्टेस और फ़र्मेट ने केवल समतल पर समन्वय विधि का उपयोग किया।
त्रि-आयामी अंतरिक्ष के लिए समन्वय विधि पहली बार 18 वीं शताब्दी में पहले से ही लियोनहार्ड यूलर द्वारा लागू की गई थी।
यह सभी देखें
लिंक
विकिमीडिया फाउंडेशन। 2010.
- कार्तीय समन्वय प्रणाली
- कार्तीय डिग्री
देखें कि "कार्टेशियन निर्देशांक" अन्य शब्दकोशों में क्या हैं:
कार्टस्टियन निर्देशांक- (कार्टेशियन समन्वय प्रणाली) एक समतल या अंतरिक्ष में एक समन्वय प्रणाली, आमतौर पर परस्पर लंबवत कुल्हाड़ियों के साथ और कुल्हाड़ियों के साथ समान पैमाने, आयताकार कार्टेशियन निर्देशांक। आर डेसकार्टेस के नाम पर ... बड़ा विश्वकोश शब्दकोश
कार्तीय निर्देशांक- एक समन्वय प्रणाली जिसमें दो लंबवत अक्ष होते हैं। ऐसी प्रणाली में एक बिंदु की स्थिति दो संख्याओं का उपयोग करके बनाई जाती है जो प्रत्येक अक्ष के साथ निर्देशांक के केंद्र से दूरी निर्धारित करती है। सूचना विषय ... ... तकनीकी अनुवादक की हैंडबुक
कार्तीय निर्देशांक- (कार्टेशियन समन्वय प्रणाली), एक विमान या अंतरिक्ष में एक समन्वय प्रणाली, आमतौर पर परस्पर लंबवत कुल्हाड़ियों के साथ और कुल्हाड़ियों के साथ समान पैमाने, आयताकार कार्टेशियन निर्देशांक। आर डेसकार्टेस के नाम पर ... विश्वकोश शब्दकोश
कार्तीय निर्देशांक- Dekarto koordinatės statusas T sritis Standartizacija ir Metrologija apibrėžtis Tiesinė plokštumos arba erdvės koordinačių sistema। जोजे असीक मास्टेलियाई पपरास्तई बना लिग्स। atitikmenys: अंग्रेजी। कार्तीय निर्देशांक वोक। कार्तेसिस कोऑर्डिनेटेडन, एफ… पेनकियाकलबिस ऐस्किनामासिस मेट्रोलोजिजोस टर्मिन, लॉडाइनास
कार्तीय निर्देशांक- Dekarto koordinatės statusas T sritis fizika atitikmenys: engl। कार्तीय निर्देशांक; ग्रिड वोक का समन्वय करता है। कार्तेसिस कोऑर्डिनेटेडन, एफ रस। कार्तीय निर्देशांक, f pranc। coordonnées कार्टेसिएनेस, f ... फ़िज़िकोस टर्मिन, odynas
कार्टस्टियन निर्देशांक- दो स्थिर लंबवत सीधी कुल्हाड़ियों के लिए उनकी दूरी से एक विमान पर बिंदुओं की स्थिति निर्धारित करने की एक विधि। यह अवधारणा दो हज़ार साल से भी पहले आर्किमिडीज़ और पेर्गा के एपोलोजिया में और यहां तक कि प्राचीन मिस्रवासियों के बीच भी देखी जा चुकी है। ऐसा पहली बार…… गणितीय विश्वकोश
कार्टस्टियन निर्देशांक- कार्टेशियन समन्वय प्रणाली [फ्रांसीसी के नाम पर। दार्शनिक और गणितज्ञ आर। डेसकार्टेस (आर। डेसकार्टेस; 1596 1650)], एक समतल या अंतरिक्ष में एक समन्वय प्रणाली, आमतौर पर परस्पर लंबवत कुल्हाड़ियों और कुल्हाड़ियों के साथ समान पैमाने के साथ, आयताकार डी ... बड़ा विश्वकोश पॉलिटेक्निक शब्दकोश
कार्टस्टियन निर्देशांक- (कार्टेशियन समन्वय प्रणाली), एक विमान या अंतरिक्ष में एक समन्वय प्रणाली, आमतौर पर परस्पर लंबवत कुल्हाड़ियों के साथ और कुल्हाड़ियों के साथ समान पैमाने, आयताकार डी। से। आर। डेसकार्टेस के नाम पर ... प्राकृतिक विज्ञान। विश्वकोश शब्दकोश
कार्टस्टियन निर्देशांक- किसी भी बिंदु के स्थान की प्रणाली में दो अक्षों के सापेक्ष हड्डियां पाई जाती हैं जो समकोण पर प्रतिच्छेद करती हैं। रेने डेसकार्टेस द्वारा विकसित, यह प्रणाली डेटा के चित्रमय प्रतिनिधित्व के लिए मानक तरीकों का आधार बन गई। क्षैतिज रेखा… … मनोविज्ञान का व्याख्यात्मक शब्दकोश
COORDINATES- निर्देशांक। विमान में (बाएं) और अंतरिक्ष में (दाएं)। निर्देशांक (लैटिन सह से एक साथ और ऑर्डिनैटस का आदेश दिया गया), संख्याएं जो अंतरिक्ष में एक सीधी रेखा, विमान, सतह पर एक बिंदु की स्थिति निर्धारित करती हैं। निर्देशांक दूरियां हैं... सचित्र विश्वकोश शब्दकोश
अनुदेश
यदि आप कैलकुलेटर का उपयोग नहीं कर सकते हैं, लेकिन इंटरनेट का उपयोग कर सकते हैं, तो पाठ के रूप में गणितीय कार्यों को लिखें और उन्हें Google साइट के मुख्य पृष्ठ पर खोज क्वेरी फ़ील्ड में दर्ज करें। इस सर्च इंजन में एक बिल्ट-इन मल्टीफंक्शनल कैलकुलेटर है, जो किसी भी अन्य की तुलना में उपयोग करना बहुत आसान है। बटन के साथ कोई इंटरफ़ेस नहीं है - सभी डेटा को एक ही फ़ील्ड में टेक्स्ट फॉर्म में दर्ज किया जाना चाहिए। उदाहरण के लिए, यदि ज्ञात हो COORDINATESचरम बिंदु खंडत्रि-आयामी समन्वय प्रणाली ए (51.34 17.2 13.02) और ए (-11.82 7.46 33.5) में, फिर COORDINATESमध्य बिंदु खंडसी((51.34-11.82)/2 (17.2+7.46)/2 (13.02+33.5)/2)। खोज क्वेरी फ़ील्ड में (51.34-11.82) / 2 दर्ज करना, फिर (17.2 + 7.46) / 2 और (13.02 + 33.5) / 2, आप प्राप्त करने के लिए Google का उपयोग कर सकते हैं COORDINATESसी (19.76 12.33 23.26)।
मानक सर्कल समीकरण आपको इस आंकड़े के बारे में कई महत्वपूर्ण जानकारी प्राप्त करने की अनुमति देता है, उदाहरण के लिए, इसके केंद्र के निर्देशांक, त्रिज्या की लंबाई। कुछ समस्याओं में, इसके विपरीत, दिए गए मापदंडों के लिए एक समीकरण बनाना आवश्यक है।

अनुदेश
आपको दिए गए कार्य के आधार पर निर्धारित करें कि क्या आपके पास मंडली के बारे में जानकारी है। याद रखें कि अंतिम लक्ष्य केंद्र के साथ-साथ व्यास के निर्देशांक निर्धारित करना है। आपके सभी कार्यों का उद्देश्य इस विशेष परिणाम को प्राप्त करना होना चाहिए।
समन्वय रेखाओं या अन्य रेखाओं के साथ प्रतिच्छेदन बिंदुओं की उपस्थिति पर डेटा का उपयोग करें। कृपया ध्यान दें कि यदि सर्कल एब्सिस्सा अक्ष से होकर गुजरता है, तो दूसरे में निर्देशांक 0 होगा, और यदि कोर्डिनेट अक्ष के माध्यम से, तो पहले वाला। ये निर्देशांक आपको वृत्त के केंद्र के निर्देशांक खोजने और त्रिज्या की गणना करने की अनुमति देंगे।
secant और स्पर्शरेखा के मूल गुणों के बारे में मत भूलना। विशेष रूप से, सबसे उपयोगी प्रमेय यह है कि संपर्क के बिंदु पर, त्रिज्या और स्पर्शरेखा एक समकोण बनाते हैं। लेकिन ध्यान दें कि आपको पाठ्यक्रम में प्रयुक्त सभी प्रमेयों को सिद्ध करने के लिए कहा जा सकता है।
सर्कल समीकरण के लिए कुछ डेटा का उपयोग कैसे करें, यह जानने के लिए सबसे सामान्य प्रकारों को हल करें। तो, सीधे दिए गए निर्देशांक के साथ पहले से ही संकेतित समस्याओं के अलावा और जिनके तहत चौराहे बिंदुओं की उपस्थिति के बारे में जानकारी दी गई है, एक सर्कल के समीकरण को संकलित करने के लिए, आप सर्कल के केंद्र के बारे में ज्ञान का उपयोग कर सकते हैं, इसकी लंबाई राग और जिस पर यह राग स्थित है।
हल करने के लिए, एक समद्विबाहु त्रिभुज का निर्माण करें, जिसका आधार दी गई जीवा होगी, और बराबर भुजाएँ त्रिज्याएँ होंगी। मेकअप करें, जिससे आप आसानी से जरूरी डेटा पा सकें। ऐसा करने के लिए, एक विमान में एक खंड की लंबाई खोजने के लिए सूत्र का उपयोग करना पर्याप्त है।
संबंधित वीडियो
एक वृत्त को एक आकृति के रूप में समझा जाता है जिसमें उसके केंद्र से समान दूरी पर एक विमान में बिंदुओं का एक समूह होता है। केंद्र से बिंदुओं की दूरी हलकोंत्रिज्या कहा जाता है।

धुवीय निर्देशांक
नंबर कहा जाता है ध्रुवीय त्रिज्याडॉट्स या पहला ध्रुवीय निर्देशांक. दूरी ऋणात्मक नहीं हो सकती, इसलिए किसी भी बिंदु की ध्रुवीय त्रिज्या होती है। पहले ध्रुवीय निर्देशांक को ग्रीक अक्षर ("rho") द्वारा भी निरूपित किया जाता है, लेकिन मैं लैटिन संस्करण के लिए अभ्यस्त हूं, और भविष्य में मैं इसका उपयोग करूंगा।
नंबर कहा जाता है ध्रुवीय कोणदिया गया बिंदु या दूसरा ध्रुवीय निर्देशांक. ध्रुवीय कोण मानक रूप से (तथाकथित .) के भीतर बदल जाता है कोण के प्रमुख मान) हालांकि, यह सीमा का उपयोग करने के लिए काफी स्वीकार्य है, और कुछ मामलों में शून्य से "प्लस अनंत" तक सभी कोण मानों पर विचार करने की प्रत्यक्ष आवश्यकता है। वैसे, मैं कोण के रेडियन माप के अभ्यस्त होने की सलाह देता हूं, क्योंकि इसे उच्च गणित में डिग्री के साथ संचालित करने के लिए उचित नहीं माना जाता है।
जोड़े को कहा जाता है धुवीय निर्देशांकअंक। खोजने में आसान और उनके विशिष्ट अर्थ। एक समकोण त्रिभुज के न्यून कोण की स्पर्शरेखा विपरीत पैर का आसन्न पैर से अनुपात है: इसलिए, कोण स्वयं: ![]() . पाइथागोरस प्रमेय के अनुसार, कर्ण का वर्ग पैरों के वर्गों के योग के बराबर होता है: इसलिए, ध्रुवीय त्रिज्या:
. पाइथागोरस प्रमेय के अनुसार, कर्ण का वर्ग पैरों के वर्गों के योग के बराबर होता है: इसलिए, ध्रुवीय त्रिज्या:
इस तरह, ![]() .
.
एक पेंगुइन अच्छा है, लेकिन एक झुंड बेहतर है: 
नकारात्मक रूप से उन्मुख कोने ![]() बस मामले में, मैंने तीरों से चिह्नित किया, अचानक पाठकों में से एक को अभी तक इस अभिविन्यास के बारे में पता नहीं था। यदि वांछित है, तो आप उनमें से प्रत्येक (रेड या 360 डिग्री) के लिए 1 मोड़ "पेंच" कर सकते हैं और वैसे, आराम से प्राप्त कर सकते हैं तालिका मान:
बस मामले में, मैंने तीरों से चिह्नित किया, अचानक पाठकों में से एक को अभी तक इस अभिविन्यास के बारे में पता नहीं था। यदि वांछित है, तो आप उनमें से प्रत्येक (रेड या 360 डिग्री) के लिए 1 मोड़ "पेंच" कर सकते हैं और वैसे, आराम से प्राप्त कर सकते हैं तालिका मान:
लेकिन इन "पारंपरिक रूप से" उन्मुख कोनों का नुकसान यह है कि वे बहुत दूर (180 डिग्री से अधिक) "मुड़" वामावर्त हैं। मुझे इस प्रश्न का पूर्वाभास है: "कमी क्यों है और हमें किसी भी नकारात्मक कोण की आवश्यकता क्यों है?" गणित में, सबसे छोटे और सबसे तर्कसंगत रास्तों को महत्व दिया जाता है। खैर, भौतिकी के दृष्टिकोण से, रोटेशन की दिशा अक्सर मौलिक महत्व की होती है - हम में से प्रत्येक ने गलत दिशा में हैंडल खींचकर दरवाजा खोलने की कोशिश की =)
ध्रुवीय निर्देशांक में बिंदुओं के निर्माण का क्रम और तकनीक
सुंदर चित्र सुंदर होते हैं, लेकिन ध्रुवीय समन्वय प्रणाली में निर्माण करना एक श्रमसाध्य कार्य है। उन बिंदुओं के साथ कठिनाइयाँ उत्पन्न नहीं होती हैं जिनके ध्रुवीय कोण होते हैं ![]() , हमारे उदाहरण में ये बिंदु हैं
, हमारे उदाहरण में ये बिंदु हैं ![]() ; 45 डिग्री के गुणज वाले मान भी अधिक परेशानी का कारण नहीं बनते हैं: . लेकिन एक बिंदु को सही ढंग से और सक्षम रूप से कैसे बनाया जाए?
; 45 डिग्री के गुणज वाले मान भी अधिक परेशानी का कारण नहीं बनते हैं: . लेकिन एक बिंदु को सही ढंग से और सक्षम रूप से कैसे बनाया जाए?
आपको कागज के एक चेकर टुकड़े, एक पेंसिल और निम्नलिखित ड्राइंग टूल्स की आवश्यकता होगी: रूलर, कंपास, चांदा. चरम मामलों में, आप एक शासक के साथ, या यहां तक कि ... इसके बिना भी प्राप्त कर सकते हैं! पढ़ें और आपको एक और सबूत मिलेगा कि यह देश अजेय है =)
उदाहरण 1
ध्रुवीय समन्वय प्रणाली में एक बिंदु का निर्माण करें।
सबसे पहले, आपको कोण की डिग्री माप का पता लगाना होगा। यदि कोण अपरिचित है या आपको संदेह है, तो इसका उपयोग करना हमेशा बेहतर होता है मेज़या रेडियन को डिग्री में बदलने का सामान्य सूत्र। तो हमारा कोण (या) है।
आइए एक ध्रुवीय समन्वय प्रणाली बनाएं (पाठ की शुरुआत देखें) और एक चांदा उठाएं। एक गोल उपकरण के मालिकों के लिए 240 डिग्री चिह्नित करना मुश्किल नहीं होगा, लेकिन उच्च संभावना के साथ आपके हाथों पर डिवाइस का अर्ध-गोलाकार संस्करण होगा। एक प्रिंटर और कैंची की उपस्थिति में एक प्रोट्रैक्टर की पूर्ण अनुपस्थिति की समस्या सुईवर्क द्वारा हल किया गया.
दो तरीके हैं: शीट को पलट दें और 120 डिग्री या "स्क्रू" को आधा मोड़ दें और विपरीत कोण पर विचार करें। आइए वयस्क विधि चुनें और 60 डिग्री का चिह्न बनाएं: 
या तो एक बौना चांदा, या एक विशाल पिंजरा =) हालांकि, कोण को मापने के लिए, पैमाना महत्वपूर्ण नहीं है।
हम एक पेंसिल के साथ पोल से गुजरने वाली एक पतली सीधी रेखा खींचते हैं और एक निशान बनाते हैं: 
हमने कोण का पता लगा लिया, अगला चरण ध्रुवीय त्रिज्या है। हम एक कंपास लेते हैं और शासक द्वाराहम इसका समाधान 3 इकाइयों पर सेट करते हैं, सबसे अधिक बार, ये निश्चित रूप से सेंटीमीटर हैं: 
अब हम ध्यान से सुई को पोल पर रखते हैं, और एक घूर्णी गति के साथ हम एक छोटा पायदान (लाल) बनाते हैं। वांछित बिंदु बनाया गया है: 
आप एक कंपास के बिना शासक को सीधे निर्मित रेखा से जोड़कर और 3 सेंटीमीटर मापकर कर सकते हैं। लेकिन, जैसा कि हम बाद में देखेंगे, ध्रुवीय समन्वय प्रणाली में निर्माण कार्यों मेंएक विशिष्ट स्थिति तब होती है जब आपको एक ही ध्रुवीय त्रिज्या के साथ दो या दो से अधिक बिंदुओं को चिह्नित करने की आवश्यकता होती है, इसलिए यह धातु को सख्त करने के लिए अधिक कुशल है। विशेष रूप से, हमारे ड्राइंग में, कम्पास के पैर को 180 डिग्री से मोड़कर, दूसरा पायदान बनाना और ध्रुव के संबंध में सममित बिंदु बनाना आसान है। इस पर, आइए अगले पैराग्राफ की सामग्री पर काम करें:
आयताकार और ध्रुवीय समन्वय प्रणालियों का संबंध
स्पष्टतः जोड़ना"सामान्य" समन्वय ग्रिड के ध्रुवीय समन्वय प्रणाली के लिए और ड्राइंग पर एक बिंदु बनाएं: 
ध्रुवीय निर्देशांक में आरेखण करते समय यह संबंध हमेशा ध्यान में रखना उपयोगी होता है। हालांकि, बिना सोचे समझे, यह बहुत अधिक संकेत के बिना खुद को सुझाता है।
आइए एक विशिष्ट बिंदु के उदाहरण का उपयोग करके ध्रुवीय और कार्तीय निर्देशांक के बीच संबंध स्थापित करें। एक समकोण त्रिभुज पर विचार करें, जिसमें कर्ण ध्रुवीय त्रिज्या के बराबर है: और पैर कार्टेशियन समन्वय प्रणाली में बिंदु के "x" और "खेल" निर्देशांक हैं: ![]() .
.
एक न्यून कोण की ज्या विपरीत पैर का कर्ण से अनुपात है: ![]()
एक न्यून कोण की कोज्या कर्ण से सटे पैर का अनुपात है: ![]()
साथ ही, उन्होंने एक व्यापक स्कूल के 9वीं कक्षा के कार्यक्रम से साइन, कोसाइन (और थोड़ा पहले स्पर्शरेखा) की परिभाषाओं को दोहराया।
कृपया अपनी संदर्भ पुस्तक में कार्य सूत्र जोड़ें जो एक बिंदु के कार्तीय निर्देशांक को उसके ध्रुवीय निर्देशांक के रूप में व्यक्त करते हैं - हमें उनसे एक से अधिक बार निपटना होगा, और अगली बार अभी =)
आइए एक आयताकार समन्वय प्रणाली में एक बिंदु के निर्देशांक खोजें: 
इस तरह:
परिणामी सूत्र निर्माण समस्या में एक और खामी खोलते हैं, जब आप बिना किसी प्रोट्रैक्टर के कर सकते हैं: पहले हम बिंदु के कार्टेशियन निर्देशांक (निश्चित रूप से, मसौदे पर) पाते हैं, फिर हम मानसिक रूप से ड्राइंग पर सही जगह पाते हैं और इस बिंदु को चिह्नित करें। अंतिम चरण में, हम एक पतली सीधी रेखा खींचते हैं जो निर्मित बिंदु और ध्रुव से होकर गुजरती है। नतीजतन, यह पता चला है कि कोण को कथित तौर पर एक प्रोट्रैक्टर द्वारा मापा गया था।
यह मज़ेदार है कि पूरी तरह से हताश छात्र पाठ्यपुस्तक, नोटबुक या ग्रेडबुक के चिकने किनारे का उपयोग करके बिना शासक के भी कर सकते हैं - आखिरकार, नोटबुक के निर्माताओं ने मीट्रिक, 1 सेल = 5 मिलीमीटर का ध्यान रखा।
यह सब मुझे एक प्रसिद्ध किस्से की याद दिलाता है जिसमें साधन संपन्न पायलटों ने बेलोमोर पैक के साथ एक कोर्स किया था \u003d) हालांकि, चुटकुले चुटकुले हैं, और किस्सा वास्तविकता से बहुत दूर नहीं है, मुझे याद है कि घरेलू उड़ानों में से एक पर रूसी संघ, सभी नेविगेशन उपकरण लाइनर में विफल हो गए, और चालक दल ने पानी के एक साधारण गिलास का उपयोग करके बोर्ड को सफलतापूर्वक उतारा, जिसने जमीन के सापेक्ष विमान के झुकाव के कोण को दिखाया। और हवाई पट्टी - यहाँ यह विंडशील्ड से दिखाई देती है।
पाठ की शुरुआत में उद्धृत पाइथागोरस प्रमेय का उपयोग करके, उलटा सूत्र प्राप्त करना आसान है: इसलिए:

कोण "फी" स्वयं चाप स्पर्शरेखा के माध्यम से मानक रूप से व्यक्त किया जाता है - बिल्कुल वैसा ही जटिल संख्या तर्कअपनी सारी खूबियों के साथ।
अपने संदर्भ सामान में सूत्रों के दूसरे समूह को रखने की भी सलाह दी जाती है।
व्यक्तिगत बिंदुओं के साथ उड़ानों के विस्तृत विश्लेषण के बाद, आइए विषय की स्वाभाविक निरंतरता पर चलते हैं:
ध्रुवीय निर्देशांक में रेखा समीकरण
अनिवार्य रूप से, एक ध्रुवीय समन्वय प्रणाली में एक रेखा का समीकरण है ध्रुवीय कोण का ध्रुवीय त्रिज्या कार्य (तर्क). इस मामले में, ध्रुवीय कोण को ध्यान में रखा जाता है रेडियन में(!) तथा लगातारसे मान लेता है (कभी-कभी इसे विज्ञापन infinitum माना जाना चाहिए, या सुविधा के लिए कई समस्याओं में से ). कोण "phi" का प्रत्येक मान, जो में शामिल है कार्यक्षेत्रफ़ंक्शन, ध्रुवीय त्रिज्या के एकल मान से मेल खाता है।
ध्रुवीय कार्य की तुलना एक प्रकार के रडार से की जा सकती है - जब एक ध्रुव से आने वाली प्रकाश की किरण वामावर्त घूमती है और एक रेखा को "पता लगाता है" (खींचता है)।
ध्रुवीय वक्र का एक सामान्य उदाहरण है आर्किमिडीयन सर्पिल. निम्नलिखित आंकड़ा उसे दिखाता है पहली बारी- जब ध्रुवीय कोण का अनुसरण करने वाली ध्रुवीय त्रिज्या 0 से : तक मान लेती है: 
इसके अलावा, बिंदु पर ध्रुवीय अक्ष को पार करते हुए, सर्पिल ध्रुव से असीम रूप से दूर, खोलना जारी रखेगा। लेकिन ऐसे मामले व्यवहार में काफी दुर्लभ हैं; एक अधिक विशिष्ट स्थिति, जब बाद की सभी क्रांतियों पर हम "एक ही रेखा के साथ चलते हैं", जो कि सीमा में प्राप्त होता है।
पहले उदाहरण में, हम अवधारणा का भी सामना करते हैं डोमेनध्रुवीय फलन: चूँकि ध्रुवीय त्रिज्या ऋणात्मक नहीं है, इसलिए यहाँ ऋणात्मक कोणों पर विचार नहीं किया जा सकता है।
! टिप्पणी : कुछ मामलों में इसका उपयोग करने की प्रथा है सामान्यीकृत ध्रुवीय निर्देशांक, जहां त्रिज्या नकारात्मक हो सकती है, और हम थोड़ी देर बाद इस दृष्टिकोण का संक्षेप में अध्ययन करेंगे
आर्किमिडीज सर्पिल के अलावा, कई अन्य प्रसिद्ध वक्र हैं, लेकिन, जैसा कि वे कहते हैं, आप कला से भरे नहीं होंगे, इसलिए मैंने ऐसे उदाहरण उठाए जो वास्तविक व्यावहारिक कार्यों में बहुत आम हैं।
सबसे पहले, सबसे सरल समीकरण और सबसे सरल रेखाएँ:
फॉर्म का एक समीकरण पोल से आउटगोइंग को निर्दिष्ट करता है रे. वास्तव में, इसके बारे में सोचें यदि कोण का मान हमेशा(जो कुछ भी "एर" है) लगातार, फिर रेखा क्या है?
टिप्पणी : सामान्यीकृत ध्रुवीय समन्वय प्रणाली में, यह समीकरण ध्रुव से गुजरने वाली एक सीधी रेखा को परिभाषित करता है
फॉर्म का समीकरण निर्धारित करता है ... पहली बार अनुमान लगाएं - if किसी के लिए भीकोना "फी" त्रिज्या स्थिर रहता है? वास्तव में, यह परिभाषा हलकोंत्रिज्या के ध्रुव पर केंद्रित।
उदाहरण के लिए, । स्पष्टता के लिए, आइए इस रेखा के समीकरण को एक आयताकार समन्वय प्रणाली में खोजें। पिछले पैराग्राफ में प्राप्त सूत्र का उपयोग करके, हम प्रतिस्थापन करेंगे:
आइए दोनों पक्षों को चौकोर करें:
– वृत्त समीकरणत्रिज्या 2 के निर्देशांक के मूल पर केंद्रित है, जिसे सत्यापित किया जाना था।
लेख के निर्माण और विमोचन के बाद से रैखिक निर्भरता और वैक्टर की रैखिक स्वतंत्रता परमुझे साइट आगंतुकों से कई पत्र प्राप्त हुए जिन्होंने भावना में एक प्रश्न पूछा: "यहां एक सरल और सुविधाजनक आयताकार समन्वय प्रणाली है, हमें किसी अन्य तिरछे एफ़िन केस की आवश्यकता क्यों है?"। उत्तर सरल है: गणित सब कुछ और सभी को गले लगाने की कोशिश करता है! इसके अलावा, इस या उस स्थिति में, सुविधा महत्वपूर्ण है - जैसा कि आप देख सकते हैं, समीकरण की अत्यधिक सादगी के कारण ध्रुवीय निर्देशांक में एक सर्कल के साथ काम करना अधिक लाभदायक है।
और कभी-कभी एक गणितीय मॉडल वैज्ञानिक खोजों की अपेक्षा करता है। तो, एक समय में, कज़ान विश्वविद्यालय के रेक्टर एन.आई. लोबचेव्स्की सख्ती से साबित, विमान के एक मनमाना बिंदु के माध्यम से आकर्षित करना संभव है लाइनों की अनंत संख्यादिए गए के समानांतर। परिणामस्वरूप, उन्हें पूरे वैज्ञानिक जगत में बदनाम किया गया, लेकिन ... इस तथ्य का खंडन कोई नहीं कर सका। एक अच्छी सदी के बाद ही, खगोलविदों ने पाया कि अंतरिक्ष में प्रकाश घुमावदार प्रक्षेपवक्र के साथ फैलता है, जहां लोबचेवस्की की गैर-यूक्लिडियन ज्यामिति, इस खोज से बहुत पहले औपचारिक रूप से उनके द्वारा विकसित की गई थी, काम करना शुरू कर देती है। यह माना जाता है कि यह अंतरिक्ष का ही एक गुण है, जिसकी वक्रता छोटी (खगोलीय मानकों के अनुसार) दूरियों के कारण हमारे लिए अदृश्य है।
अधिक सार्थक निर्माण कार्यों पर विचार करें:
उदाहरण 2
एक पंक्ति बनाएँ
समाधान: पहली खोज कार्यक्षेत्र. चूंकि ध्रुवीय त्रिज्या गैर-ऋणात्मक है, असमानता को धारण करना चाहिए। आप त्रिकोणमितीय असमानताओं को हल करने के लिए स्कूल के नियमों को याद कर सकते हैं, लेकिन इस तरह के साधारण मामलों में, मैं हल करने की एक तेज और अधिक दृश्य विधि की सलाह देता हूं:
कोसाइन प्लॉट की कल्पना करें। यदि वह अभी तक स्मृति में जमा नहीं हो पाया है, तो उसे पृष्ठ पर खोजें प्राथमिक कार्यों के रेखांकन. असमानता हमें क्या बताती है? यह हमें बताता है कि कोसाइन ग्राफ स्थित होना चाहिए कम नहीं हैएब्सिस्सा अक्ष। और यह एक खंड पर होता है। और, तदनुसार, अंतराल फिट नहीं होता है।
इस प्रकार, हमारे फ़ंक्शन का डोमेन है: यानी, ग्राफ ध्रुव के दाईं ओर स्थित है (कार्तीय प्रणाली की शब्दावली के अनुसार, दाहिने आधे-तल में)।
ध्रुवीय निर्देशांक में, अक्सर एक अस्पष्ट विचार होता है कि कौन सी रेखा इस या उस समीकरण को परिभाषित करती है, इसलिए इसे बनाने के लिए, आपको उन बिंदुओं को खोजने की आवश्यकता है जो इससे संबंधित हैं - और जितना अधिक, उतना ही बेहतर। आमतौर पर एक दर्जन या दो (या उससे भी कम) तक सीमित। सबसे आसान तरीका, निश्चित रूप से, लेना है सारणीबद्ध कोण मान. अधिक स्पष्टता के लिए, मैं नकारात्मक मूल्यों की ओर एक मोड़ "बन्धन" करूंगा: 
कोसाइन की समता के कारण ![]() संबंधित सकारात्मक मूल्यों को फिर से छोड़ा जा सकता है:
संबंधित सकारात्मक मूल्यों को फिर से छोड़ा जा सकता है: 
आइए ध्रुवीय समन्वय प्रणाली को चित्रित करें और पाए गए बिंदुओं को अलग रखें, जबकि एक समय में "एर" के समान मूल्यों को अलग करना सुविधाजनक है, ऊपर चर्चा की गई तकनीक के अनुसार एक कंपास के साथ युग्मित सेरिफ़ बनाना: 
सिद्धांत रूप में, रेखा स्पष्ट रूप से खींची गई है, लेकिन अनुमान की पूरी तरह से पुष्टि करने के लिए, आइए कार्टेशियन समन्वय प्रणाली में इसके समीकरण को खोजें। आप नए व्युत्पन्न सूत्र लागू कर सकते हैं ![]() , लेकिन मैं आपको एक ट्रिकियर ट्रिक के बारे में बताऊंगा। हम समीकरण के दोनों हिस्सों को कृत्रिम रूप से "एर" से गुणा करते हैं: और अधिक कॉम्पैक्ट ट्रांज़िशन फ़ार्मुलों का उपयोग करते हैं:
, लेकिन मैं आपको एक ट्रिकियर ट्रिक के बारे में बताऊंगा। हम समीकरण के दोनों हिस्सों को कृत्रिम रूप से "एर" से गुणा करते हैं: और अधिक कॉम्पैक्ट ट्रांज़िशन फ़ार्मुलों का उपयोग करते हैं:
पूर्ण वर्ग का चयन करते हुए, हम रेखा के समीकरण को पहचानने योग्य रूप में लाते हैं: 
![]() – वृत्त समीकरणबिंदु पर केंद्रित, त्रिज्या 2.
– वृत्त समीकरणबिंदु पर केंद्रित, त्रिज्या 2.
चूंकि, शर्त के अनुसार, निर्माण को पूरा करना आवश्यक था और यही वह है, हम आसानी से पाए गए बिंदुओं को एक रेखा से जोड़ते हैं: 
तैयार। यह ठीक है अगर यह थोड़ा असमान हो जाता है, तो आपको यह जानने की ज़रूरत नहीं थी कि यह एक चक्र था ;-)
हमने अंतराल के बाहर कोण मानों पर विचार क्यों नहीं किया? उत्तर सरल है: इसका कोई मतलब नहीं है। समारोह की आवधिकता को देखते हुए, हम निर्मित सर्कल के साथ एक अंतहीन दौड़ की प्रतीक्षा कर रहे हैं।
एक सरल विश्लेषण करना और इस निष्कर्ष पर पहुंचना आसान है कि फॉर्म का समीकरण बिंदु पर एक केंद्र के साथ व्यास के एक चक्र को परिभाषित करता है। लाक्षणिक रूप से, ऐसे सभी वृत्त ध्रुवीय अक्ष पर "बैठते हैं" और आवश्यक रूप से ध्रुव से होकर गुजरते हैं। यदि , तो हंसमुख कंपनी बाईं ओर प्रवास करेगी - ध्रुवीय अक्ष की निरंतरता के लिए (सोचें क्यों)।
एक स्वतंत्र समाधान के लिए एक समान समस्या:
उदाहरण 3
एक आयताकार निर्देशांक प्रणाली में एक रेखा खींचिए और उसका समीकरण ज्ञात कीजिए।
हम समस्या को हल करने की प्रक्रिया को व्यवस्थित करते हैं:
सबसे पहले, हम फ़ंक्शन का डोमेन ढूंढते हैं, इसके लिए इसे देखना सुविधाजनक है sinusoidतुरंत यह समझने के लिए कि साइन कहाँ गैर-ऋणात्मक है।
दूसरे चरण में, हम बिंदुओं के ध्रुवीय निर्देशांक की गणना करते हैं कोणों के सारणीबद्ध मान; विश्लेषण करें कि क्या गणनाओं की संख्या को कम करना संभव है?
तीसरे चरण में, हम ध्रुवीय समन्वय प्रणाली में बिंदुओं को अलग रखते हैं और ध्यान से उन्हें एक रेखा से जोड़ते हैं।
और, अंत में, हम कार्तीय निर्देशांक प्रणाली में रेखा का समीकरण पाते हैं।
पाठ के अंत में नमूना समाधान।
हम ध्रुवीय निर्देशांक में निर्माण के लिए सामान्य एल्गोरिदम और तकनीक का विस्तार करते हैं
और काफी तेजीव्याख्यान के दूसरे भाग में, लेकिन उससे पहले, आइए एक और सामान्य पंक्ति से परिचित हों:
ध्रुवीय गुलाब
बिल्कुल सही, हम बात कर रहे हैं पंखुड़ियों वाले फूल की:
उदाहरण 4
ध्रुवीय निर्देशांकों में समीकरणों द्वारा दी गई रेखाएँ प्लॉट करें
ध्रुवीय गुलाब के निर्माण के दो तरीके हैं। सबसे पहले, चलो घुमावदार ट्रैक के साथ चलते हैं, यह मानते हुए कि ध्रुवीय त्रिज्या नकारात्मक नहीं हो सकती है:
समाधान:
ए) फ़ंक्शन का डोमेन खोजें: ![]()
इस तरह की त्रिकोणमितीय असमानता को ग्राफिक रूप से हल करना भी आसान है: लेख की सामग्री से ज्यामितीय प्लॉट परिवर्तनयह ज्ञात है कि यदि फ़ंक्शन तर्क को दोगुना कर दिया जाता है, तो इसका ग्राफ़ y-अक्ष तक 2 गुना सिकुड़ जाएगा। कृपया निर्दिष्ट पाठ के पहले उदाहरण में फ़ंक्शन का ग्राफ़ खोजें। यह साइनसॉइड x-अक्ष के ऊपर कहाँ स्थित है? अंतरालों पर ![]() . इसलिए, संबंधित खंड असमानता को संतुष्ट करते हैं, और कार्यक्षेत्रहमारा कार्य:
. इसलिए, संबंधित खंड असमानता को संतुष्ट करते हैं, और कार्यक्षेत्रहमारा कार्य: ![]() .
.
सामान्यतया, विचाराधीन असमानताओं का समाधान अनंत खंडों का मिलन है, लेकिन, फिर से, हम केवल एक अवधि में रुचि रखते हैं।
शायद, कुछ पाठकों को परिभाषा के क्षेत्र को खोजने की विश्लेषणात्मक विधि आसान लगेगी, मैं सशर्त रूप से इसे "एक गोल पाई का टुकड़ा" कहूंगा। हम काटेंगे बराबर भागों मेंऔर, सबसे पहले, पहले भाग की सीमाएँ ज्ञात कीजिए। हम इस प्रकार तर्क देते हैं: साइन गैर-ऋणात्मक है, जब उसका तर्क 0 से लेकर रेड तक। सहित। हमारे उदाहरण में: . दोहरी असमानता के सभी भागों को 2 से विभाजित करने पर, हम आवश्यक अंतराल प्राप्त करते हैं:
अब हम क्रमिक रूप से "90 डिग्री के बराबर टुकड़े काटते हैं" वामावर्त शुरू करते हैं:
- निश्चित रूप से पाया गया खंड परिभाषा क्षेत्र में शामिल है;
- अगला अंतराल - शामिल नहीं;
- अगला खंड - प्रवेश करता है;
- और, अंत में, अंतराल - शामिल नहीं है।
कैमोमाइल की तरह - "प्यार करता है, प्यार नहीं करता, प्यार नहीं करता, प्यार नहीं करता" =) इस अंतर के साथ कि यह भाग्य-बताने वाला नहीं है। हाँ, चीनी में बस किसी तरह का प्यार निकलता है ....
इसलिए, ![]() और रेखा दो समान पंखुड़ियों वाले गुलाब का प्रतिनिधित्व करती है। आरेख को योजनाबद्ध रूप से खींचना काफी संभव है, लेकिन सही ढंग से खोजने और चिह्नित करने के लिए यह अत्यधिक वांछनीय है पंखुड़ियों के शीर्ष. कोने मेल खाते हैं परिभाषा के क्षेत्र के खंडों के मध्यबिंदु, जिसमें इस उदाहरण में स्पष्ट कोणीय निर्देशांक हैं
और रेखा दो समान पंखुड़ियों वाले गुलाब का प्रतिनिधित्व करती है। आरेख को योजनाबद्ध रूप से खींचना काफी संभव है, लेकिन सही ढंग से खोजने और चिह्नित करने के लिए यह अत्यधिक वांछनीय है पंखुड़ियों के शीर्ष. कोने मेल खाते हैं परिभाषा के क्षेत्र के खंडों के मध्यबिंदु, जिसमें इस उदाहरण में स्पष्ट कोणीय निर्देशांक हैं ![]() . जिसमें पंखुड़ी की लंबाईहैं:
. जिसमें पंखुड़ी की लंबाईहैं: 
यहाँ एक देखभाल करने वाले माली का स्वाभाविक परिणाम है: 
यह ध्यान दिया जाना चाहिए कि पंखुड़ी की लंबाई समीकरण से तुरंत देखना आसान है - चूंकि साइन सीमित है: , तो "एर" का अधिकतम मूल्य निश्चित रूप से दो से अधिक नहीं होगा।
ख) आइए समीकरण द्वारा दी गई रेखा की रचना करें। जाहिर है, इस गुलाब की पंखुड़ी की लंबाई भी दो है, लेकिन, सबसे पहले, हम परिभाषा के क्षेत्र में रुचि रखते हैं। हम "स्लाइसिंग" की विश्लेषणात्मक विधि लागू करते हैं: साइन गैर-ऋणात्मक है जब इसका तर्कशून्य से "pi" की सीमा में है, इस मामले में: . हम असमानता के सभी भागों को 3 से विभाजित करते हैं और पहला अंतराल प्राप्त करते हैं:
अगला, हम रेड के अनुसार "पाई को टुकड़ों में काटना" शुरू करते हैं। (60 डिग्री):
- खंड परिभाषा क्षेत्र में प्रवेश करेगा;
- अंतराल - प्रवेश नहीं करेगा;
- खंड - प्रवेश करेगा;
- अंतराल - प्रवेश नहीं करेगा;
- खंड - प्रवेश करेगा;
- अंतराल - प्रवेश नहीं करेगा।
प्रक्रिया को 360 डिग्री के निशान पर सफलतापूर्वक पूरा कर लिया गया है।
तो गुंजाइश है: ![]() .
.
मानसिक रूप से पूर्ण या आंशिक रूप से किए गए कार्य आसान होते हैं।
निर्माण। यदि पिछले पैराग्राफ में समकोण और 45-डिग्री के कोण के साथ सब कुछ ठीक रहा, तो यहां आपको थोड़ा टिंकर करना होगा। हमे पता करने दें पंखुड़ियों के शीर्ष. उनकी लंबाई कार्य की शुरुआत से ही दिखाई दे रही थी, यह कोणीय निर्देशांक की गणना करने के लिए बनी हुई है, जो परिभाषा के क्षेत्र के खंडों के मध्य बिंदुओं के बराबर हैं: 
कृपया ध्यान दें कि पंखुड़ियों के शीर्ष के बीच आपको समान अंतराल मिलना चाहिए, इस मामले में 120 डिग्री।
ड्राइंग को 60-डिग्री क्षेत्रों (हरी रेखाओं द्वारा सीमांकित) में चिह्नित करना और पंखुड़ियों (ग्रे लाइनों) के शीर्ष की दिशाओं को आकर्षित करना वांछनीय है। एक कंपास की मदद से खुद को कोने में चिह्नित करना सुविधाजनक है - एक बार 2 इकाइयों की दूरी को मापें और खींची गई दिशाओं में 30, 150 और 270 डिग्री पर तीन पायदान लागू करें: 
तैयार। मैं समझता हूं कि कार्य परेशानी भरा है, लेकिन अगर आप हर चीज को स्मार्ट तरीके से व्यवस्थित करना चाहते हैं, तो आपको समय बिताना होगा।
हम सामान्य सूत्र तैयार करते हैं: फॉर्म का एक समीकरण, एक प्राकृतिक संख्या है), एक ध्रुवीय-पंखुड़ी गुलाब को परिभाषित करता है जिसकी पंखुड़ी की लंबाई है।
उदाहरण के लिए, समीकरण 5 इकाइयों की पंखुड़ी की लंबाई के साथ एक quatrefoil निर्दिष्ट करता है, समीकरण - 3 इकाइयों की पंखुड़ी लंबाई के साथ 5-पंखुड़ी वाला गुलाब। आदि।
