Formularea problemei
Sarcina implică familiarizarea utilizatorului cu conceptele de bază ale metodelor numerice, cum ar fi determinantul și matricea inversă, precum și cu diferite moduri de a le calcula. În acest raport teoretic, într-un limbaj simplu și accesibil, sunt introduse mai întâi conceptele și definițiile de bază, pe baza cărora se efectuează cercetări ulterioare. Este posibil ca utilizatorul să nu aibă cunoștințe speciale în domeniul metodelor numerice și algebrei liniare, dar poate utiliza cu ușurință rezultatele acestei lucrări. Pentru claritate, este dat un program de calcul al determinantului matricei prin mai multe metode, scris în limbajul de programare C++. Programul este folosit ca stand de laborator pentru crearea de ilustrații pentru raport. De asemenea, se efectuează un studiu al metodelor de rezolvare a sistemelor de ecuații algebrice liniare. Inutilitatea calculării matricei inverse este dovedită, astfel încât lucrarea oferă modalități mai optime de a rezolva ecuații fără a le calcula. Se explică de ce există atât de multe metode diferite de calculare a determinanților și matricelor inverse și sunt analizate deficiențele acestora. Sunt de asemenea luate în considerare erorile în calculul determinantului și se estimează acuratețea obținută. Pe lângă termenii ruși, echivalentele lor în engleză sunt, de asemenea, folosite în lucrare pentru a înțelege sub ce nume să caute proceduri numerice în biblioteci și ce înseamnă parametrii acestora.
Definiții de bază și proprietăți simple
Determinant
Să introducem definiția determinantului unei matrice pătrate de orice ordin. Această definiție va recurent, adică pentru a stabili care este determinantul matricei de ordine, trebuie să știți deja care este determinantul matricei de ordine. Rețineți, de asemenea, că determinantul există numai pentru matrice pătrată.
Determinantul unei matrice pătrate va fi notat cu sau det .
Definiția 1. determinant matrice pătrată  se numește numărul de ordine al doilea
se numește numărul de ordine al doilea ![]() .
.
determinant  matricea pătrată de ordin, se numește număr
matricea pătrată de ordin, se numește număr 
unde este determinantul matricei de ordine obtinut din matrice prin stergerea primului rand si a coloanei cu numarul .
Pentru claritate, scriem cum puteți calcula determinantul unei matrice de ordinul al patrulea: 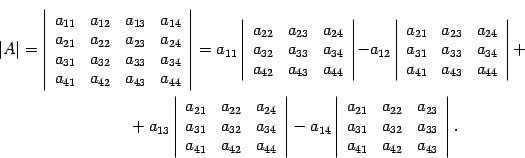
Cometariu. Calculul propriu-zis al determinanților pentru matricele de peste ordinul trei pe baza definiției este utilizat în cazuri excepționale. De regulă, calculul se efectuează conform altor algoritmi, care vor fi discutați mai târziu și care necesită mai puțină muncă de calcul.
Cometariu.În Definiția 1, ar fi mai corect să spunem că determinantul este o funcție definită pe mulțimea matricelor de ordine pătrată și luând valori în mulțimea numerelor.
Cometariu.În literatură, în locul termenului „determinant”, se folosește și termenul „determinant”, care are același sens. Din cuvântul „determinant” a apărut desemnarea det.
Să luăm în considerare câteva proprietăți ale determinanților, pe care le formulăm sub formă de aserțiuni.
Afirmația 1. La transpunerea unei matrice, determinantul nu se modifică, adică .
Afirmația 2. Determinantul produsului matricelor pătrate este egal cu produsul determinanților factorilor, adică .
Afirmația 3. Dacă două rânduri dintr-o matrice sunt schimbate, atunci determinantul său își va schimba semnul.
Afirmația 4. Dacă o matrice are două rânduri identice, atunci determinantul ei este zero.
În viitor, va trebui să adăugăm șiruri și să înmulțim un șir cu un număr. Vom efectua aceste operații pe rânduri (coloane) în același mod ca și operațiunile pe matrice de rând (matrice de coloană), adică element cu element. Rezultatul va fi un rând (coloană), care, de regulă, nu se potrivește cu rândurile matricei originale. În prezența operațiilor de adunare de rânduri (coloane) și de înmulțire a acestora cu un număr, se poate vorbi și despre combinații liniare de rânduri (coloane), adică sume cu coeficienți numerici.
Afirmația 5. Dacă un rând al unei matrice este înmulțit cu un număr, atunci determinantul său va fi înmulțit cu acel număr.
Afirmația 6. Dacă matricea conține un rând zero, atunci determinantul său este zero.
Afirmația 7. Dacă unul dintre rândurile matricei este egal cu celălalt înmulțit cu un număr (rândurile sunt proporționale), atunci determinantul matricei este zero.
Afirmația 8. Fie al-lea rând din matrice să arate ca . Apoi, unde matricea se obține din matrice prin înlocuirea rândului i cu rândul, iar matricea se obține prin înlocuirea rândului i cu rândul.
Afirmația 9. Dacă unul dintre rândurile matricei este adăugat la altul, înmulțit cu un număr, atunci determinantul matricei nu se va schimba.
Afirmația 10. Dacă unul dintre rândurile unei matrice este o combinație liniară a celorlalte rânduri ale sale, atunci determinantul matricei este zero.
Definiția 2. Adunarea algebrică unui element de matrice se numește număr egal cu , unde este determinantul matricei obținut din matrice prin ștergerea rândului i și coloanei j. Complementul algebric la un element de matrice este notat cu .
Exemplu. Lasa  . Apoi
. Apoi 

Cometariu. Folosind adunări algebrice, definiția unui determinant poate fi scrisă după cum urmează: 
Afirmația 11. Descompunerea determinantului într-un șir arbitrar.
Determinantul matricei satisface formula 
Exemplu. calculati  .
.
Decizie. Să folosim expansiunea din a treia linie, este mai profitabilă, pentru că în a treia linie două numere din trei sunt zerouri. obține 
Afirmația 12. Pentru o matrice pătrată de ordin la , avem relația  .
.
Afirmația 13. Toate proprietățile determinantului formulat pentru rânduri (propozițiile 1 - 11) sunt valabile și pentru coloane, în special, extinderea determinantului în coloana j-a este valabilă  și egalitate
și egalitate  la .
la .
Afirmația 14. Determinantul unei matrici triunghiulare este egal cu produsul elementelor diagonalei sale principale.
Consecinţă. Determinantul matricei de identitate este egal cu unu, .
Concluzie. Proprietățile enumerate mai sus fac posibilă găsirea determinanților matricilor de ordine suficient de mare cu o cantitate relativ mică de calcule. Algoritmul de calcul este următorul.
Algoritm pentru crearea zerourilor într-o coloană. Să fie necesar să se calculeze determinantul de ordine. Dacă , atunci schimbați prima linie și orice altă linie în care primul element nu este zero. Ca urmare, determinantul , va fi egal cu determinantul noii matrice cu semnul opus. Dacă primul element al fiecărui rând este egal cu zero, atunci matricea are o coloană zero și, prin afirmațiile 1, 13, determinantul său este egal cu zero.
Deci, considerăm că deja în matricea originală. Lăsați prima linie neschimbată. Să adăugăm la a doua linie prima linie, înmulțită cu numărul . Atunci primul element al celui de-al doilea rând va fi egal cu  .
.
Elementele rămase din noul al doilea rând vor fi notate cu , . Determinantul noii matrice conform afirmației 9 este egal cu . Înmulțiți prima linie cu numărul și adăugați-o la a treia. Primul element al noului al treilea rând va fi egal cu 
Elementele rămase din noul al treilea rând vor fi notate cu , . Determinantul noii matrice conform afirmației 9 este egal cu .
Vom continua procesul de obținere a zerourilor în locul primelor elemente de șiruri. În cele din urmă, înmulțim prima linie cu un număr și o adăugăm la ultima linie. Rezultatul este o matrice, notată cu , care are forma 
și . Pentru a calcula determinantul matricei, folosim expansiunea din prima coloană
De atunci 
Determinantul matricei de ordine este în partea dreaptă. Îi aplicăm același algoritm, iar calculul determinantului matricei se va reduce la calculul determinantului matricei de ordine. Procesul se repetă până ajungem la determinantul de ordinul doi, care se calculează prin definiție.
Dacă matricea nu are proprietăți specifice, atunci nu este posibil să se reducă semnificativ cantitatea de calcule în comparație cu algoritmul propus. O altă parte bună a acestui algoritm este că este ușor să scrieți un program pentru un computer pentru a calcula determinanții matricilor de ordine mari. În programele standard pentru calcularea determinanților, acest algoritm este utilizat cu modificări minore asociate cu minimizarea efectului erorilor de rotunjire și erorilor de date de intrare în calculele computerizate.
Exemplu. Calculați determinantul matricei  .
.
Decizie. Prima linie este lăsată neschimbată. La a doua linie adăugăm primul, înmulțit cu numărul:
Determinantul nu se schimbă. La a treia linie adăugăm primul, înmulțit cu numărul:
Determinantul nu se schimbă. La a patra linie adăugăm primul, înmulțit cu numărul:
Determinantul nu se schimbă. Drept urmare, obținem 
Folosind același algoritm, calculăm determinantul unei matrice de ordinul 3, care se află în dreapta. Lăsăm prima linie neschimbată, la a doua linie o adunăm pe prima, înmulțită cu numărul  :
:
La a treia linie adăugăm primul, înmulțit cu numărul  :
:
Drept urmare, obținem 
Răspuns. .
Cometariu. Deși s-au folosit fracții în calcule, rezultatul a fost un număr întreg. Într-adevăr, folosind proprietățile determinanților și faptul că numerele originale sunt numere întregi, operațiile cu fracții ar putea fi evitate. Dar în practica ingineriei, numerele sunt extrem de rar numere întregi. Prin urmare, de regulă, elementele determinantului vor fi fracții zecimale și nu este indicat să folosiți niciun truc pentru a simplifica calculele.
matrice inversă
Definiția 3. Matricea se numește matrice inversă pentru o matrice pătrată dacă .
Din definiție rezultă că matricea inversă va fi o matrice pătrată de același ordin ca și matricea (altfel unul dintre produse sau nu ar fi definit).
Matricea inversă pentru o matrice se notează cu . Astfel, dacă există, atunci.
Din definiția unei matrice inversă, rezultă că matricea este inversul matricei, adică . Matrice și se poate spune că sunt inverse între ele sau reciproc inverse.
Dacă determinantul unei matrice este zero, atunci inversul său nu există.
Deoarece pentru găsirea matricei inverse este important dacă determinantul matricei este egal cu zero sau nu, introducem următoarele definiții.
Definiția 4. Să numim matrice pătrată degenerat sau matrice specială, dacă nedegenerat sau matrice nesingulară, dacă .
Afirmație. Dacă există o matrice inversă, atunci aceasta este unică.
Afirmație. Dacă o matrice pătrată este nedegenerată, atunci inversul ei există și  (1) unde sunt adunări algebrice la elemente .
(1) unde sunt adunări algebrice la elemente .
Teorema. O matrice inversă pentru o matrice pătrată există dacă și numai dacă matricea este nesingulară, matricea inversă este unică și formula (1) este validă.
Cometariu. O atenție deosebită trebuie acordată locurilor ocupate de adunări algebrice în formula matriceală inversă: primul indice arată numărul coloană, iar al doilea este numărul linii, în care trebuie scris complementul algebric calculat.
Exemplu.  .
.
Decizie. Găsirea determinantului
Deoarece , atunci matricea este nedegenerată, iar inversul pentru ea există. Găsirea adunărilor algebrice: 
Compunem matricea inversă plasând adunările algebrice găsite astfel încât primul indice să corespundă coloanei, iar al doilea rândului:  (2)
(2)
Matricea rezultată (2) este răspunsul la problemă.
Cometariu.În exemplul anterior, ar fi mai corect să scrieți răspunsul astfel:  (3)
(3)
Cu toate acestea, notația (2) este mai compactă și este mai convenabil să efectuați calcule suplimentare, dacă există, cu ea. Prin urmare, scrierea răspunsului în forma (2) este de preferat dacă elementele matricelor sunt numere întregi. Și invers, dacă elementele matricei sunt fracții zecimale, atunci este mai bine să scrieți matricea inversă fără un factor în față.
Cometariu. Când găsiți matricea inversă, trebuie să efectuați destul de multe calcule și o regulă neobișnuită pentru aranjarea adunărilor algebrice în matricea finală. Prin urmare, există șanse mari de eroare. Pentru a evita erorile, ar trebui să faceți o verificare: calculați produsul matricei originale cu cel final într-o ordine sau alta. Dacă rezultatul este o matrice de identitate, atunci matricea inversă este găsită corect. În caz contrar, trebuie să căutați o eroare.
Exemplu. Aflați inversul unei matrice  .
.
Decizie.
![]() - exista.
- exista.
Răspuns:  .
.
Concluzie. Găsirea matricei inverse prin formula (1) necesită prea multe calcule. Pentru matricele de ordinul al patrulea și mai mari, acest lucru este inacceptabil. Algoritmul real pentru găsirea matricei inverse va fi dat mai târziu.
Calcularea determinantului și a matricei inverse folosind metoda Gauss
Metoda Gauss poate fi folosită pentru a găsi determinantul și matricea inversă.
Și anume, determinantul matricei este egal cu det .
Matricea inversă se găsește prin rezolvarea sistemelor de ecuații liniare folosind metoda de eliminare gaussiană:
Unde este j-a coloană a matricei de identitate, este vectorul necesar.
Vectorii soluție rezultați - formează, evident, coloanele matricei, deoarece .
Formule pentru determinant
1. Dacă matricea este nesingulară, atunci și (produsul elementelor conducătoare).
Deoarece pentru găsirea matricei inverse este important dacă determinantul matricei este egal cu zero sau nu, introducem următoarele definiții.
Definiție 14.9 Să numim matrice pătrată degenerat sau matrice specială, dacă nedegenerat sau matrice nesingulară, dacă .
Oferta 14.21 Dacă există o matrice inversă, atunci aceasta este unică.
Dovada. Fie două matrice și inversul matricei. Apoi
Prin urmare, .
regula lui Cramer.
Fie ecuația matriceală AX=B
Unde ; este determinantul obtinut din determinant Dînlocuire i-a coloană după coloana membrilor liberi ai matricei B:
 |
Dovada Teorema este împărțită în trei părți:
1. Soluția sistemului (1) există și este unică.
2. Egalitățile (2) sunt o consecință a ecuației matriceale (1).
3. Egalitățile (2) implică ecuația matriceală (1).
Deoarece, există și o matrice inversă unică.
Înmulțind ambele părți ale ecuației matriceale (1) din stânga cu , obținem soluția acestei ecuații:
unicitatea matricea inversă demonstrează prima parte a teoremei.
Să trecem la dovadă corespondență unu-la-unuîntre formulele (1) și (2).
Folosind formula (4), obținem o expresie pentru i-al-lea element. Pentru aceasta trebuie să vă înmulțiți i- al-lea rând al matricei
![]()
pe coloană B.
Dat fiind i-allea rând al matricei asociate este compus din adunări algebrice, obținem următorul rezultat:
Derivarea formulelor lui Cramer este completă. Să arătăm acum că expresiile
Să schimbăm ordinea însumării din partea dreaptă a expresiei rezultate:
unde este simbolul delta Kronecker.
Având în vedere că simbolul delta elimină suma peste unul dintre indici, obținem rezultatul necesar:
Numere complexe: Ideea este de a defini obiecte noi cu ajutorul celor cunoscute. Numerele reale sunt situate pe o linie dreaptă. Când trecem în avion, obținem numere complexe. Definiție: Un număr complex este o pereche de numere reale z = (a,b). Numărul a = Re z se numește parte reală, iar b = Im z partea imaginară a numărului complex z .
Operatii pe numere complexe: Numerele complexe z1 z2 sunt Z1 = z2 ⇔ Re z1 = Re z2 & Im z1 = Im z2. Plus: Z=z1+z2. ⇔Rez=Rez1+Rez2 & Imz1+ Imz2. Numărul (0,0) este notat cu 0. Acesta este elementul neutru. Se verifică că adunarea numerelor complexe are proprietăți similare cu cele ale adunării numerelor reale. (1. Z1+ z2 = z2 + z1 – comutativitate; 2. Z1 + (z2 + z3) = (z1 + z2) + z3 – asociativitate; 3. Z1 + 0 = z1 - existența zeroului (element neutru); 4. z + (−z) = 0 - existența elementului opus). Multiplicare: z= z1 z2⇔Re z=Re z1 Re z2-Im z1 Im z2 & Im z1=Im z1 Re z2+Im z2 Re z1. Un număr complex z se află pe axa reală dacă Imz = 0 . Rezultatele operațiilor asupra unor astfel de numere coincid cu rezultatele operațiilor asupra numerelor reale obișnuite. Înmulțirea numerelor complexe are proprietățile de închidere, comutativitate și asociativitate. Numărul (1,0) se notează cu 1. Este un element neutru prin înmulțire Dacă a∈ R, z ∈C , atunci Re(az) = aRe z, Im(az) = a Imz . Definiție Numărul (0,1) este notat cu iși se numește unitatea imaginară. În această notație, obținem reprezentarea unui număr complex în formă algebrică: z = a + ib, a,b∈ R. i=-1.(a,b)=(a,0)+(0,b);(a,0)+b(0,1)=a+ib=z; (a1+ib)(a2+ib2)=a1a2+i(a1b2+1-a2b1)-b1b2; (a+ib)(1+0i)=a+ib; z(a,b), z(0+i0)=0; z!=0; a 2 + b 2 > 0 (a + ib) (a-ib / a 2 + b 2) = 1. Numărul se numește conjuga la z dacă Re =Re z ; Sunt =- sunt z.
= + ; = ; z =(a+ib)(a-ib)=a 2 +b 2 Modulul unui număr z este un număr real| z |= . Formula corectă| z| 2 = z Din definiție rezultă că z ≠ 0⇔| z|≠ 0. z -1 = /|z| 2 (1)
Forma trigonometrică a unui număr complex: a=rcos(t); b=r sin(t). Z=a+ib=r(cos(t)+isin(t))(2) argument t al unui număr complex. Z1=z2 =>|z1|=|z2|
arg(z1)-arg(z2)=2pk.
Z1=r1(cos(t1)+isin(t1), Z2=r2(cos(t2)+isin(t2)), Z3=z1 z2=T1T2(cos(t1+t2)+isin(t1+t2)( unu)
Arg(z1z2)=arg(z1)+arg(z2) (2)
Z!=0 z -1 = /|z| 2 =1/r(cos(-t)+i(sin(-t)) Z=r(cos(t)+istn(t))
R(cos(t)-isin(t))
Definiție: Rădăcina gradului n din unitate este soluția ecuației z n =1 Propunere. Există n rădăcini a n-a distincte ale unității. Ele sunt scrise ca z = cos(2 π k / n) + isin(2 π k / n), k = 0,..., n −1 . Teorema. In multimea numerelor complexe, ecuatia are intotdeauna n solutii.Z=r(cos(t)+isin(t)); z n =r n (cos(nt)+isin(nt))=1(cos(0)+isin(0))=>z n =1 .Z-întregi. K aparține lui Z. k=2=E 2 =E n-1 E n ; E n = 1; E n+p =E p . Astfel, se demonstrează că soluțiile ecuației sunt vârfurile unui n-gon regulat, iar unul dintre vârfuri coincide cu 1.
a n-a rădăcină a lui z 0. Z k \u003d Z 0; Z0 =0 => Z=0; Z0 !=0;Z=r(cos(t)-isin(t)); Z 0 \u003d r 0 (cos (t0) + isin (t0)); r0!=0; Z n \u003d r n (cos (nt) + isin (nt))
r n \u003d r 0, nt-t 0 \u003d 2pk; r=; t=(2pk+t0)/n; z= (cos((2pk+t0)/n)+isin((2pk+t0)/n)= (cos t0/n+isin t0/n)(cos(2pk/n)+isin(2pk/n) )=Z 1 E k ;z=z 1 E k ;Z 1 n =z 0, k=0, n=1
Matrici. Definiție: O matrice m × n este un tabel dreptunghiular care conține m rânduri și n coloane, ale căror elemente sunt numere reale sau complexe. Elementele matricei au indici dubli.
Dacă m = n, atunci este o matrice pătrată de ordinul m, iar elementele cu același indice formează diagonala principală a matricei.
Operații cu matrice: Definiție: Două matrice A,B sunt numite
egale dacă dimensiunile lor sunt aceleași și A = B,1≤ i ≤ m,1≤ j ≤ n
Plus. Sunt luate în considerare matrici de aceeași dimensiune. Definiție:C = A + B ⇔ C = A + B, ∀i, j Oferi. Adunarea matricei este comutativă, asociativă, există un element neutru și pentru fiecare matrice există un element opus.
Elementul neutru este matricea zero, toate elementele fiind egale cu 0. Se notează cu Θ.
Multiplicare. O matrice A m × n este notată cu Amn . Definiție: C mk =A mn B nk ó
C= Rețineți că, în general, înmulțirea nu este comutativă. Închiderea este valabilă pentru o matrice pătrată de dimensiune fixă. Să fie date trei matrice Amn , Bnk , Ckr. Atunci (AB)C = A(BC). Dacă există un produs din 3 matrice, atunci acesta este asociativ.
Simbolul Kronecker δij . Este 1 dacă indicii se potrivesc și 0 în caz contrar. Definiție. Matricea identitate I n este o matrice pătrată de ordin n pentru care egalitățile n I n [ i | j] = δij Oferi. Egalități I m A mn =A mn I n =A mn
Adunarea și înmulțirea matricelor este legată de legile distributivității. A(B+C)=AB+AC; (A+B)C=AC+BC;(A(B+C)= = = +
Transpunerea matricei. O matrice transpusă este o matrice obținută din cea originală prin înlocuirea rândurilor cu coloane.
(A+B) T = A T + B T
(AB) T \u003d B T A T; (AB) T \u003d (AB) \u003d \u003d (B T A T)
Înmulțirea unei matrice cu un număr. Produsul dintre numărul a și matricea A mn se numește noua matrice B=aA
1*A=A;a(A+B)=aA+aB;(a+b)A=aA+bA;
A(BC)=(aB)C=B(aC); (ab)A=a(bA)=b(aA)
spațiu liniar(L) peste câmpul F se numește mulțimea vectorilor L=(α,β..)
1.α+β=β+α(comutativitate) 2.α+(β+γ)= (α+β)+γ, (ab)α=a(bα)(asociativitate) 3.α+θ=α, α∙1=α(existența neutrului) 4.α+(-α)=θ (existența opusului)
a(α+β)=aα+aβ, (a+b)α=aα+bα. Documentație (|(a+b)α|=|a+b||α|, |aα|=|a||α|,|bα|=|b||α|, a și b>0, |a +b|=a+b,|a|=a,|b|=b.) aα+(-a)α=θ, (a+0)α=aα
Un exemplu de spațiu liniar este un set de matrice de dimensiuni fixe cu operații de adunare și înmulțire cu un număr.
Sistemul de vectori liniari se numește dependent liniar, dacă 1.a 1 ,a 2 ..a n ≠0 2. a 1 α 1 ,a 2 α 2 ..a n α n =θ Dacă sistemul nu este liniar dependent, atunci este liniar independent. Se consideră 1. n=1 α 1 depind. a 1 ≠0, a 1 α 1 =θ, a 1 -1 (a 1 α 1)= a 1 -1∙ θ=θ, (a 1 -1 a 1)α 1 =1∙α 1 =α 1 ; 2. n=2 α 1 ,α 2 depind. a 1 ≠0, a 1 α 1 + a 2 α 2 =θ, α 1 = -a 1 -1 a 2 α 2 = b 2 α 2; 3.n≥2 α 1 ..α n depind. a 1 ≠0, α 1 =Σ k =2 n b k α k , 1α 1 - Σ k =2 n b k α k =θ, (1,b 2 ..b n)≠0
Oferi: Un sistem de vectori care conține mai mult de 1 vector este dependent liniar, apoi un vector al sistemului este o combinație liniară a celorlalți.
Dacă un sistem de vectori conține un subsistem dependent liniar, atunci întregul sistem este dependent liniar. Documentație: (α 1 ..α n depinde. Sistem: α 1 ..α n ;α n +1 ..α m , a 1 α 1 +..+a n α n +0α n +1 +.. +0α m =θ, a 1 ..a n ,0..0≠0.) Dacă sistemul conține un vector nul, atunci acesta este dependent liniar. Teorema spațiilor liniare: (Se dau 2 sisteme de vectori α 1 ..α m , β 1 ..β n. Sistemul de vectori α se exprimă în termeni de β dacă fiecare vector α este o combinație liniară β α i = Σ k =1 n a ik β k , (α ) ( (β), (β) ( (γ)→ (α) ( (γ)) Teorema: Având în vedere 2 sisteme de vectori, α este independent și, (α) ( (β)→m≤n Să demonstrăm că α 1 ..α m +1 β 1 ..β m (α) ( (β)→(α) ) depinde (Să demonstrăm prin inducție. m=1: α 1 =a 11 β 1 , α 2 =a 21 β 1. a 11 =0→ α 1 =θ. a 11 α 2 – a 21 α 1 = a 11 a 21 β 1 - a 21 a 11 β 1 =θ α 1 = a 11 β 1 +.. a 1 n -1 β n -1 .. α n = a n 1 β 1 + .. a nn -1 β n - 1 Dacă toți coeficienții =0 a 11 =a 12 =..=a 1 n -1 =0→ α 1 =θ→ întregul sistem este dependent liniar a 1 n -1 ≠0 α 2 ′= α 2 – с 2 α 1 =b 21 β 1 +..+b 2 n -2 β n -2 , c 2 =a 2 n -1 / a 1 n -1 , α 3 ′= α 3 –с 3 α 1 . α n ′= α n –с n α 1. Prin pre-inducție, există o mulțime de numere nenule d 2 ..d n: d 2 α 2 ′+d 3 α 3 ′+.. d n α n ′=θ , d 2 ( α 2 –с 2 α 1)+d 3 (α 3 –с 3 α 1)+.. d n (α n –с n α 1)=θ , (α) ( (β) , m>n →(α )depinde dacă (α) independent →m≤n)
MLNP-max.subsistem.independent.linie. Fie dat un sistem de vectori α 1 ..α n ai unui subsistem. α i 1 ..α in se numește MLIS dacă 1. α 1 ..α n este independent2. α i 1 ..α ir , α ij depinde. Fiecare vector al sistemului este o combinație liniară de vectori MLLM. ( α i 1 ..α ir , α ij dependent a i 1 α i 1 +.. a ir α ir +a ij α ij =θ
a i 1 ..a ir , a ij ≠0 dacă a ij =0 → a i 1 α i 1 +.. a ir α ir =θ a i 1 ..a ir =0 contradicție a ij ≠0 α ij = a ij - 1 (-a i 1 α i 1 -.. a ir α ir) (α 1 ..α n) ( (α i 1 ..α ir)
Consecinţă: Orice 2 MLIS dintr-un sistem de vectori conțin același număr de vectori (α i 1 ..α ir) ( (α j 1 ..α jk) , (α j 1 ..α jk) ( (α i 1 . .α ir ) k≤r, r≤k →r=k Numărul de vectori MLLM se numește rang sistem original. În cazul unui spațiu liniar (un sistem de vectori este format din toți vectorii din spațiu), MLLM mb este fie finit, fie infinit. Luăm în considerare cazul final. Numărul de vectori (rangul) este dimensiunea spațiului liniar. baza MLNP. Spațiul segmentelor direcționate. Doi vectori necoliniari alcătuiesc bazaîn spaţiul vectorilor de pe plan. α 3 = α 1 ′+ α 2 ′=a 1 α 1 + a 2 α 2 . 3 vectori dependenți liniar α 3 =a 1 α 1 + a 2 α 2 . Complanaritate - 3 vectori sunt paraleli cu același plan α 4 = α 4 ′+ α 5 ′ , α 4 ′=a 1 α 1 + a 2 α 2 , α 5 ′= a 3 α 3 , α 4 = a 1 α 1 + a 2 α 2 + a 3 α 3 . Spațiul șirurilor de lungime n. α= Oferi: Spațiul șirurilor de lungime n are dimensiunea n. ( ξ 1 =<1…0>ξ2 =<0,1…0>.. n =<0…1>,a 1 ξ 1 + a 2 ξ 2 +.. a n ξ n =θ=<0,..0> → a 1 =a 2 =..a n =0 (independență liniară) β= β= b 1 ξ 1 + b 2 ξ 2 +.. b n ξ n →spațiul șirurilor de lungime n are dimensiune și n.
Rangul matricei.
Două sisteme de vectori α și β sunt numite echivalente dacă fiecare vector
α( β(exprimat) și β(α.
Oferi. Rândurile sistemelor echivalente coincid.
α i 1 , α i 2 ,…, α ir – MLLM α , β i 1 , β i 2 ,…, β ik – MLLM β , α i 1 , α i 2 ,…, α ir< β < β i 1 , β i 2 ,…, β ik → r<=k
Schimbarea locurilor α și β → r>=k >>> Prin urmare, r=k.
Definiție. Fie matricea A=
Rangul matricei A se numește rangul sistemului de vectori α1, α2,…, αm, compus din această matrice >>rank(A)-rank
Din definiție, este evident că atunci când coloanele sunt rearanjate, rangul nu se schimbă. Să arătăm că atunci când coloanele sunt rearanjate, nici rangul nu se schimbă.
A'= 
Dependent liniar:
b 1 α 1 + b 2 α 2 +…+ b m α m =θ, b 1 a 11 +b 2 a 21 +…+b m a m 1=0, b 1 α' 1 + b 2 α' 2 +…+ b m α' m , b 1 a 11 +b 2 a 21 +…+b m a m 1=0
Este egal cu suma produselor elementelor unui rând sau coloană și a complementelor lor algebrice, i.e. , unde i 0 este fix.
Expresia (*) se numește descompunerea determinantului D în funcție de elementele rândului cu numărul i 0 .
Atribuirea serviciului. Acest serviciu este conceput pentru a găsi online determinantul matricei cu proiectarea întregului curs al soluției în format Word. În plus, un șablon de soluție este creat în Excel.
Instruire. Selectați dimensiunea matricei, faceți clic pe Următorul.
Există două moduri de a calcula determinantul: a-prioriuși descompunere pe rând sau coloană. Dacă doriți să găsiți determinantul creând zerouri într-unul dintre rânduri sau coloane, atunci puteți utiliza acest calculator.Algoritm pentru găsirea determinantului
- Pentru matrice de ordin n=2, determinantul se calculează prin formula: Δ=a 11 *a 22 -a 12 *a 21
- Pentru matrice de ordinul n=3, determinantul se calculează prin adunări algebrice sau metoda Sarrus.
- O matrice cu dimensiunea mai mare de trei este descompusă în adunări algebrice, pentru care se calculează determinanții lor (minori). De exemplu, determinant matricei de ordinul 4 se găsește prin extindere în rânduri sau coloane (vezi exemplu).

Să folosim prima linie de extindere.
Δ = sin(x)× + 1× = 2sin(x)cos(x)-2cos(x) = sin(2x)-2cos(x)
Metode de calcul al determinanților
Găsirea determinantului prin adunări algebrice este o metodă comună. Versiunea sa simplificată este calculul determinantului prin regula Sarrus. Cu toate acestea, cu o dimensiune mare a matricei, sunt utilizate următoarele metode:- calculul determinantului prin reducerea ordinului
- calculul determinantului prin metoda gaussiană (prin reducerea matricei la o formă triunghiulară).
Utilizarea aplicată a determinanților
Determinanții se calculează, de regulă, pentru un anumit sistem, dat sub forma unei matrice pătrate. Luați în considerare unele tipuri de sarcini găsirea determinantului matriceal. Uneori este necesar să se găsească un parametru necunoscut a pentru care determinantul ar fi egal cu zero. Pentru a face acest lucru, este necesar să se întocmească o ecuație pentru determinant (de exemplu, conform regula triunghiului) și, echivalându-l cu 0 , se calculează parametrul a .
Uneori este necesar să se găsească un parametru necunoscut a pentru care determinantul ar fi egal cu zero. Pentru a face acest lucru, este necesar să se întocmească o ecuație pentru determinant (de exemplu, conform regula triunghiului) și, echivalându-l cu 0 , se calculează parametrul a . descompunere pe coloane (pe prima coloană):
Minor pentru (1,1): ștergeți primul rând și prima coloană din matrice.
Să găsim determinantul pentru acest minor. ∆ 1,1 \u003d (2 (-2) -2 1) \u003d -6.
Să determinăm minorul pentru (2,1): pentru a face acest lucru, ștergem al doilea rând și prima coloană din matrice.
Să găsim determinantul pentru acest minor. ∆ 2,1 = (0 (-2)-2 (-2)) = 4 . Minor pentru (3,1): ștergeți al 3-lea rând și prima coloană din matrice.Să găsim determinantul pentru acest minor. ∆ 3,1 = (0 1-2 (-2)) = 4
Principalul determinant este: ∆ = (1 (-6)-3 4+1 4) = -14
Să găsim determinantul folosind expansiunea pe rânduri (de primul rând):
Minor pentru (1,1): ștergeți primul rând și prima coloană din matrice.
Să găsim determinantul pentru acest minor. ∆ 1,1 \u003d (2 (-2) -2 1) \u003d -6. Minor pentru (1,2): ștergeți primul rând și a doua coloană din matrice. Să calculăm determinantul pentru acest minor. ∆ 1,2 \u003d (3 (-2) -1 1) \u003d -7. Și pentru a găsi minorul pentru (1,3) ștergem primul rând și a treia coloană din matrice. Să găsim determinantul pentru acest minor. ∆ 1,3 = (3 2-1 2) = 4
Găsim determinantul principal: ∆ \u003d (1 (-6) -0 (-7) + (-2 4)) \u003d -14
Sistem de m ecuații liniare cu n necunoscute numit un sistem al formei
Unde aijși b i (i=1,…,m; b=1,…,n) sunt câteva numere cunoscute și x 1 ,…,x n- necunoscut. În notarea coeficienţilor aij primul indice i denotă numărul ecuației, iar al doilea j este numărul necunoscutului la care se află acest coeficient.
Coeficienții pentru necunoscute se vor scrie sub forma unei matrice  , pe care o vom numi matricea sistemului.
, pe care o vom numi matricea sistemului.
Numerele din partea dreaptă a ecuațiilor b 1 ,…,b m numit membri liberi.
Agregat n numere c 1 ,…,c n numit decizie a acestui sistem, dacă fiecare ecuație a sistemului devine o egalitate după înlocuirea numerelor în ea c 1 ,…,c nîn locul necunoscutelor corespunzătoare x 1 ,…,x n.
Sarcina noastră va fi să găsim soluții pentru sistem. În acest caz, pot apărea trei situații:
Un sistem de ecuații liniare care are cel puțin o soluție se numește comun. Altfel, i.e. dacă sistemul nu are soluții, atunci se numește incompatibil.
Luați în considerare modalități de a găsi soluții pentru sistem.
METODĂ MATRIXĂ PENTRU REZOLVARE A SISTEMELOR DE ECUAȚII LINARE
Matricele fac posibilă scrierea pe scurt a unui sistem de ecuații liniare. Să fie dat un sistem de 3 ecuații cu trei necunoscute:
Luați în considerare matricea sistemului  și coloane matrice de membri necunoscuți și liberi
și coloane matrice de membri necunoscuți și liberi 
Să găsim produsul

acestea. ca rezultat al produsului, obținem părțile din stânga ecuațiilor acestui sistem. Apoi, folosind definiția egalității matriceale, acest sistem poate fi scris ca
 sau mai scurt A∙X=B.
sau mai scurt A∙X=B.
Aici matrice Ași B sunt cunoscute, iar matricea X necunoscut. Ea trebuie găsită, pentru că. elementele sale sunt soluția acestui sistem. Această ecuație se numește ecuația matriceală.
Fie determinantul matricei diferit de zero | A| ≠ 0. Atunci ecuația matriceală se rezolvă după cum urmează. Înmulțiți ambele părți ale ecuației din stânga cu matricea A-1, inversul matricei A: . În măsura în care A -1 A = Eși E∙X=X, apoi obținem soluția ecuației matriceale în forma X = A -1 B .
Rețineți că, deoarece matricea inversă poate fi găsită numai pentru matrice pătrată, metoda matricei poate rezolva numai acele sisteme în care numărul de ecuații este același cu numărul de necunoscute. Cu toate acestea, notația matriceală a sistemului este posibilă și în cazul în care numărul de ecuații nu este egal cu numărul de necunoscute, atunci matricea A nu este pătrat și, prin urmare, este imposibil să găsiți o soluție la sistem în formă X = A -1 B.
Exemple. Rezolvarea sistemelor de ecuații.

REGULA LUI CRAMER
Să considerăm un sistem de 3 ecuații liniare cu trei necunoscute:
Determinant de ordinul trei corespunzător matricei sistemului, i.e. compus din coeficienți la necunoscute,
numit determinant de sistem.
Mai compunem trei determinanti astfel: inlocuim succesiv 1, 2 si 3 coloane in determinantul D cu o coloana de membri liberi

Apoi putem demonstra următorul rezultat.
Teoremă (regula lui Cramer). Dacă determinantul sistemului este Δ ≠ 0, atunci sistemul luat în considerare are una și o singură soluție și
![]()
Dovada. Deci, luați în considerare un sistem de 3 ecuații cu trei necunoscute. Înmulțiți prima ecuație a sistemului cu complementul algebric A 11 element un 11, a 2-a ecuație - pe A21și al treilea - pe A 31:

Să adăugăm aceste ecuații:
Luați în considerare fiecare dintre paranteze și partea dreaptă a acestei ecuații. Prin teorema expansiunii determinantului în ceea ce privește elementele coloanei I
În mod similar, se poate demonstra că și .
În sfârșit, este ușor să vezi asta 
Astfel, obținem egalitatea: .
Prin urmare, .
Egalitățile și sunt derivate în mod similar, de unde urmează afirmația teoremei.
Astfel, observăm că dacă determinantul sistemului este Δ ≠ 0, atunci sistemul are o soluție unică și invers. Dacă determinantul sistemului este egal cu zero, atunci sistemul fie are un set infinit de soluții, fie nu are soluții, adică. incompatibil.
Exemple. Rezolvați un sistem de ecuații

METODA GAUSS
Metodele considerate anterior pot fi folosite pentru a rezolva numai acele sisteme în care numărul de ecuații coincide cu numărul de necunoscute, iar determinantul sistemului trebuie să fie diferit de zero. Metoda Gaussiană este mai universală și este potrivită pentru sisteme cu orice număr de ecuații. Constă în eliminarea succesivă a necunoscutelor din ecuațiile sistemului.
Să considerăm din nou un sistem de trei ecuații cu trei necunoscute:
 .
.
Lăsăm prima ecuație neschimbată, iar din a 2-a și a 3-a excludem termenii care conțin x 1. Pentru a face acest lucru, împărțim a doua ecuație la A 21 și înmulțiți cu - A 11 și apoi se adună cu prima ecuație. În mod similar, împărțim a treia ecuație în A 31 și înmulțiți cu - A 11 și apoi adăugați-l la primul. Ca rezultat, sistemul original va lua forma:

Acum, din ultima ecuație, eliminăm termenul care conține x2. Pentru a face acest lucru, împărțiți a treia ecuație cu , înmulțiți cu și adăugați-o la a doua. Atunci vom avea un sistem de ecuații:

Prin urmare, din ultima ecuație este ușor de găsit x 3, apoi din a 2-a ecuație x2 si in sfarsit de la 1 - x 1.
Când se utilizează metoda Gaussiană, ecuațiile pot fi schimbate dacă este necesar.
Adesea, în loc să scrie un nou sistem de ecuații, ei se limitează la a scrie matricea extinsă a sistemului:

și apoi aduceți-o într-o formă triunghiulară sau diagonală folosind transformări elementare.
La transformări elementare matricele includ următoarele transformări:
- permutarea rândurilor sau coloanelor;
- înmulțirea unui șir cu un număr diferit de zero;
- adăugând la o linie alte linii.
Exemple: Rezolvați sisteme de ecuații folosind metoda Gauss.

Astfel, sistemul are un număr infinit de soluții.
2. Dacă │А│=0, atunci matricea A este degenerată și matricea inversă A -1 nu există.
Dacă determinantul matricei A nu este egal cu zero, atunci există matricea inversă.
3. Găsiți A T transpus în A.
4. Aflați complementele algebrice ale elementelor matricei transpuse și compuneți matricea adjunctă din acestea. 5. Calculăm matricea inversă după formula: 6. Verificați corectitudinea calculului matricei inverse, pe baza definiției acesteia A -1 ∙A = A ∙A -1 = E.
· №28
· Într-o matrice m x n, prin ștergerea oricăror rânduri și coloane, se pot selecta submatrici pătrate de ordinul k, unde k≤min(m; n). Determinanții unor astfel de submatrici sunt numiți minori de ordinul k al matricei A.
· Rangul unei matrice A este cel mai înalt ordin al minorilor non-zero din această matrice.
· Rangul unei matrice A este notat rang A sau r(A).
· Din definitie rezulta:
· 1) rangul unei matrice de dimensiunea m x n nu depășește cea mai mică dintre dimensiunile sale, adică. r(A) ≤ min (m; n).
· 2) r(A)=0 dacă și numai dacă toate elementele matricei sunt egale cu zero, i.e. A=0.
· 3) Pentru o matrice pătrată de ordinul al n-lea, r(A) = n dacă și numai dacă matricea A este nedegenerată.
· În cazul general, determinarea rangului unei matrice prin enumerarea tuturor minorilor este destul de laborioasă. Pentru a facilita această sarcină, sunt utilizate transformări elementare care păstrează rangul matricei:
· 1) Respingerea rândului (coloana) zero.
· 2) Înmulțirea tuturor elementelor unui rând (coloană) a unei matrice cu un număr diferit de zero.
· 3) Modificarea ordinii rândurilor (coloanelor) a matricei.
· 4) Adăugarea fiecărui element dintr-un rând (coloană) a elementelor corespunzătoare dintr-un alt rând (coloană), înmulțit cu orice număr.
· 5) Transpunerea matricei.
· Teorema. Rangul unei matrice nu se va schimba în cazul transformărilor elementare ale matricei.
№31
Fie numărul de ecuații din sistemul (1) egal cu numărul de variabile, i.e. m=n. Atunci matricea sistemului este pătrată, iar determinantul său Δ=│A│ se numește determinant al sistemului.
Să presupunem că │А│ nu este egal cu zero, atunci există o matrice inversă A -1 .
Înmulțind ambele părți ale egalității matricei din stânga cu matricea inversă A -1 obținem:
A -1 (AX) \u003d A -1 B.
Rezolvarea sistemului de ecuații prin metoda matricei inverse va fi matricea coloanei:
X \u003d A -1 B.
(A -1 A)X \u003d EX \u003d X
 teorema lui Cramer. Fie Δ determinantul matricei sistemului A, iar Δ j determinantul matricei obținute din matrice prin înlocuirea coloanei j cu o coloană de termeni liberi. Atunci, dacă Δ nu este egal cu zero, atunci sistemul are o soluție unică definită de formulele Cramer:
teorema lui Cramer. Fie Δ determinantul matricei sistemului A, iar Δ j determinantul matricei obținute din matrice prin înlocuirea coloanei j cu o coloană de termeni liberi. Atunci, dacă Δ nu este egal cu zero, atunci sistemul are o soluție unică definită de formulele Cramer:
unde j=1..n.
№33
 Metoda Gauss - metoda eliminarii succesive a variabilelor - consta in faptul ca, cu ajutorul transformarilor elementare, sistemul de ecuatii se reduce la un sistem echivalent de forma treptata sau triunghiulara.
Metoda Gauss - metoda eliminarii succesive a variabilelor - consta in faptul ca, cu ajutorul transformarilor elementare, sistemul de ecuatii se reduce la un sistem echivalent de forma treptata sau triunghiulara.
Luați în considerare matricea:
această matrice se numește matrice extinsă a sistemului (1), deoarece, pe lângă matricea sistemului A, include suplimentar o coloană de membri liberi.
№26
Un vector N-dimensional este o mulțime ordonată de n numere reale scrise ca X=(x 1,x 2,...x n) , unde x i este a i-a componentă a vectorului X.
Doi vectori n-dimensionali sunt egali daca si numai daca componentele lor respective sunt egale, i.e. X=Y dacă x i =y i , i=1…n.
Mulțimea vectorilor cu componente reale, în care sunt definite operațiile de adunare a vectorilor și de înmulțire a unui vector cu un număr care satisface proprietățile de mai sus, se numește spațiu vectorial.
Un spațiu vectorial R se numește n-dimensional dacă există n vectori liniar independenți în el și orice n + 1 vectori sunt deja dependenți. Numărul n se numește dimensiunea spațiului vectorial R și se notează dim(R).
№29
Operatori liniari
Definiție. Dacă este dată o lege (regulă), conform căreia fiecare vector x al spațiului este asociat cu un singur vector y al spațiului
apoi se spune: că este dat operatorul (transformare, mapare) A(x), acţionând de la şi
scrie y=A(x).
Un operator se numește liniar dacă pentru orice vector x și y al spațiului
 și orice număr λ, sunt valabile următoarele relații:
și orice număr λ, sunt valabile următoarele relații:
№37
Fie А o mulțime formată dintr-un număr finit de elemente a 1 , a 2 , a 3 …a n . Grupurile pot fi formate din diferite elemente ale mulțimii A. Dacă fiecare grup include același număr de elemente m (m din n), atunci se spune că formează compuși de n elemente cu m fiecare. Există trei tipuri de conexiuni: plasări, combinații și permutări.
conexiuni, fiecare dintre ele include toate cele n elemente ale mulțimii A și care, prin urmare, diferă între ele doar în ordinea elementelor se numesc permutări a n elemente. Numărul de astfel de permutări este notat cu simbolul Р n .
№35
Definiția clasică a probabilității se bazează pe conceptul de echiprobabilitate a evenimentelor.
Echivalența evenimentelor înseamnă că nu există niciun motiv pentru a prefera unul dintre ele în detrimentul altora.
Să luăm în considerare un test, în urma căruia poate apărea evenimentul A. Fiecare rezultat, în care evenimentul A are loc, se numește eveniment favorabil A.
Probabilitatea unui eveniment A (notat cu P(A)) este raportul dintre numărul de rezultate favorabile evenimentului A (notat cu k) și numărul tuturor rezultatelor testului - N i.e. P(A)=k/N.
Următoarele proprietăți rezultă din definiția clasică a probabilității:
Probabilitatea oricărui eveniment este între zero și unu.
Probabilitatea unui anumit eveniment este egală cu unu.
Probabilitatea unui eveniment imposibil este zero
№39, 40
 Teorema adunării. Dacă A și B sunt inconsecvenți, atunci P(A + B) = P(A) + P(B)
Teorema adunării. Dacă A și B sunt inconsecvenți, atunci P(A + B) = P(A) + P(B)
