E complet \u003d E kin + U
E kin \u003d mv 2 / 2 + Jw 2 / 2 - energia cinetică a mișcării de translație și rotație,
U = mgh este energia potențială a unui corp de masă m la o înălțime h deasupra suprafeței Pământului.
F tr \u003d kN - forța de frecare de alunecare, N - forța de presiune normală, k - coeficientul de frecare.
În cazul unui impact decentrat, legea conservării impulsului
S p i= const se scrie în proiecții pe axele de coordonate.
Legea conservării momentului unghiular și legea dinamicii mișcării de rotație
S L i= const este legea conservării momentului unghiular,
L OS \u003d Jw - moment unghiular axial,
L orb = [ rp] este momentul unghiular orbital,
dL/dt=SM ext - legea dinamicii mișcării de rotație,
M= [RF] = rFsina – momentul forței, F – forța, a – unghiul dintre raza-vector și forță.
A \u003d òMdj - lucru în timpul mișcării de rotație.
Secția mecanică
Cinematică
Sarcină
Sarcină. Dependența traseului parcurs de corp în timp este dată de ecuația s = A–Bt+Ct 2 . Aflați viteza și accelerația corpului la momentul t.
Exemplu de soluție
v \u003d ds / dt \u003d -B + 2Ct, a \u003d dv / dt \u003d ds 2 / dt 2 \u003d 2C.
Opțiuni
1.1. Dependenţa traseului parcurs de organism în timp este dată de
ecuația s \u003d A + Bt + Ct 2, unde A \u003d 3m, B \u003d 2 m / s, C \u003d 1 m / s 2.
Găsiți viteza în a treia secundă.
2.1. Dependenţa traseului parcurs de organism în timp este dată de
ecuația s \u003d A + Bt + Ct 2 + Dt 3, unde C \u003d 0,14m / s 2 și D \u003d 0,01 v / c 3.
După cât timp după începerea mișcării, accelerația corpului
va fi egal cu 1 m/s 2.
3.1 Roata, care se rotește uniform accelerată, a atins viteza unghiulară
20 rad/s prin N = 10 rotații după începerea mișcării. A găsi
accelerația unghiulară a roții.
4.1 O roată cu raza de 0,1 m se rotește astfel încât dependența unghiului
j \u003d A + Bt + Ct 3, unde B \u003d 2 rad / s și C \u003d 1 rad / s 3. Pentru puncte mincinoase
pe janta roții, găsiți după 2 s după începerea mișcării:
1) viteza unghiulară, 2) viteza liniară, 3) unghiulară
accelerație, 4) accelerație tangențială.
5.1.O roată cu raza de 5 cm se rotește astfel încât dependența unghiului
rotația razei roții în funcție de timp este dată de ecuație
j \u003d A + Bt + Ct 2 + Dt 3, unde D \u003d 1 rad / s 3. Găsiți puncte mincinoase
pe janta, modificarea acceleratiei tangentiale pt
fiecare secundă de mișcare.
6.1.O roată cu raza de 10 cm se rotește astfel încât dependența
viteza liniară a punctelor situate pe janta roții, de la
timpul este dat de ecuația v \u003d At + Bt 2, unde A \u003d 3 cm / s 2 și
B \u003d 1 cm / s 3. Aflați unghiul format de vectorul completului
acceleraţia cu raza roţii la momentul t = 5s după
începerea mișcării.
7.1.Roata se rotește astfel încât dependența unghiului de rotație a razei
roata față de timp este dată de ecuația j =A +Bt +Ct 2 +Dt 3 , unde
B \u003d 1 rad / s, C \u003d 1 rad / s 2, D \u003d 1 rad / s 3. Găsiți raza roții,
dacă se ştie că până la sfârşitul celei de-a doua secunde de mişcare
acceleraţia normală a punctelor aflate pe janta roţii este
și n \u003d 346 m / s 2.
8.1.Vectorul rază al unui punct material se modifică în timp conform
lege R=t 3 eu+ t2 j. Determinați pentru momentul de timp t = 1 s:
modulul de viteză și modulul de accelerație.
9.1.Vectorul rază al unui punct material se modifică în timp conform
lege R=4t2 eu+ 3t j+2la. Scrieți o expresie pentru un vector
viteza si acceleratia. Determinați pentru timpul t = 2 s
modulul de viteză.
10.1 Un punct se deplasează în planul xy dintr-o poziție cu coordonate
x 1 = y 1 = 0 cu viteza v= A i+Bx j. Definiți ecuația
traiectoria punctului y(x) și forma traiectoriei.
Moment de inerție
distanta L/3 de la inceputul lansetei.
Exemplu de soluție.
M - masa tijei J = J st + J gr
L - lungimea tijei J st1 \u003d mL 2 / 12 - momentul de inerție a tijei
2m este greutatea greutății în raport cu centrul acesteia. Prin teoremă
Steiner găsește momentul de inerție
J=? tija în raport cu axa o, distanțată de centru cu o distanță a = L/2 - L/3 = L/6.
J st \u003d mL 2 / 12 + m (L / 6) 2 \u003d mL 2 / 9.
Conform principiului suprapunerii
J \u003d mL 2 / 9 + 2m (2L / 3) 2 \u003d mL 2.
Opțiuni
1.2. Determinați momentul de inerție al unei tije cu masa de 2m față de o axă distanțată de la începutul tijei cu o distanță L/4. La capătul tijei, masa concentrată m.
2.2 Determinați momentul de inerție al tijei cu masa m față de
axă distanțată de la începutul tijei la o distanță L/5. La sfârșitul
masa concentrată tijă 2m.
3.2. Determinați momentul de inerție al unei tije cu masa de 2m în jurul unei axe distanțate de la începutul tijei cu o distanță L/6. La capătul tijei, masa concentrată m.
4.2. Determinați momentul de inerție al unei tije cu masa de 3m în jurul unei axe distanțate de la începutul tijei de o distanță L/8. La capatul tijei, masa concentrata este de 2m.
5.2. Determinați momentul de inerție al unei tije cu masa de 2m în jurul axei care trece prin începutul tijei. Masele concentrate m sunt atașate la capătul și mijlocul tijei.
6.2. Determinați momentul de inerție al unei tije cu masa de 2m în jurul axei care trece prin începutul tijei. O masă concentrată de 2 m este atașată la capătul tijei, iar o masă concentrată de 2 m este atașată la mijloc.
7.2. Determinați momentul de inerție al tijei cu masa m în jurul axei, care este L/4 de la începutul tijei. Masele concentrate m sunt atașate la capătul și mijlocul tijei.
8.2. Aflați momentul de inerție al unui inel subțire omogen de masă m și rază r în jurul unei axe situate în planul inelului și distanțată de centrul acestuia cu r/2.
9.2. Aflați momentul de inerție al unui disc subțire omogen de masă m și rază r în jurul unei axe situate în planul discului și distanțată de centrul acestuia cu r/2.
10.2. Aflați momentul de inerție al unei bile omogene de masă m și rază
r raportat la axa distanțată de centrul ei cu r/2.
Tomsk: TUSUR, 2012.- 136 p.
Acest manual conține 13 capitole privind principalele secțiuni de mecanică, prevăzute de standardul de bază al educației fizice pentru studenții specialităților tehnice ale universităților. La nivel metodologic original, manualul conturează bazele metodei coordonatelor și ale aparatului conceptual vectorial al mecanicii, bazele cinematicii și dinamicii mișcării de translație și rotație a unui corp rigid, legile conservării energiei și impulsului mecanic. sisteme; mecanica fluidelor și a solidelor elastice, teoria clasică a gravitației și mișcării corpurilor cerești, proprietățile de bază ale oscilațiilor armonice, fundamentele fizice ale teoriei relativității speciale. Acest manual de fizică este prezentat în limbajul cel mai concis, dar destul de informativ. În general, acest manual pare a fi util nu numai studenților din primul an, ci și tuturor absolvenților universităților tehnice. Profesorii de fizică vor găsi și noi abordări în prezentarea unor secțiuni.
Format: pdf
Marimea: 1,7 MB
Urmăriți, descărcați:yandex.disk
CUPRINS
Introducere 6
1 Metoda coordonatelor. Vectorii 9
1.1 Definițiile termenilor fizici primari 9
1.2 Sistemul de coordonate 10
1.3 Viteza și accelerația 11
1.4 Modificarea coordonatelor ca integrală a vitezei 12
1.5 Generalizare la cazul mișcării tridimensionale 13
1.6 Vectori 14
1.7 Algebră vectorială 16
2 Cinematica materialului punctul 19
2.1 Viteza curbilinie și accelerația 19
2.2 Produs încrucișat 21
2.3 Cinematica mișcării de rotație 24
2.4 Mișcarea unui corp aruncat în unghi față de orizontală 26
3 Legile mișcării 29
3.1 Conceptul de forță 29
3.2 A doua lege a lui Newton. Greutate 30
3.3 A treia lege a lui Newton 31
3.4 Cadre de referință inerțiale 33
3.5 Cadre de referință non-inerțiale 34
3.6 Principiul relativității lui Galileo 35
3.7 Exemple de diferite forțe 36
4 Elan și energie 40
4.1 Centrul de inerție (centrul de masă) al unui corp extins 40
4.2 Determinarea poziției centrului de masă al corpurilor simple 42
4.3 Momentul corpului 43
4.4 Lucrul mecanic și energia cinetică 44
4.5 Forțele conservatoare 46
4.6 Energie potențială. Gradient 47
4.7 Legea conservării energiei mecanice 49
5 Ciocnirea a două particule 51
5.1 Energia internă a unui sistem mecanic 51
5.2 Clasificarea ciocnirilor duble 52
5.3 Impact central (frontal) absolut elastic 53
5.4 Impact absolut inelastic 54
5.5 Coliziunea în sistemul C 55
5.6 Impact necentral absolut elastic 55
6 Mecanica fluidelor 58
6.1 Legea lui Pascal 58
6.2 Presiunea hidrostatică. Puterea lui Arhimede 59
6.3 Curgerea staționară a unui fluid ideal 60
6.4 Exemple de utilizare a ecuației Bernoulli 62
6.5 Frecare vâscoasă 64
6.6 Curgerea unui lichid vâscos printr-o conductă 65
6.7 Debit turbulent. Reynolds numărul 66
6.8 Forțe de rezistență atunci când corpurile se mișcă într-un fluid vâscos 67
7 Proprietățile elastice ale solidelor 69
7.1 Stresul și încordarea 69
7.2 Legea lui Hooke. Modulul Young și raportul lui Poisson 71
7.3 Energia de deformare elastică a mediului 72
7.4 Compresie generală 72
7.5 Deformarea la compresiune a unei bare fixe 73
7.6 Deformarea termică a solidelor 74
7.7 Deformarea prin forfecare 75
8 Dinamica unui corp rigid 78
8.1 Momentul de inerție al unui corp rigid 78
8.2 Momentele de inerție ale unor corpuri simple 79
8.3 Momentul de forță 81
8.4 Cuplul unghiular 82
8.5 Dinamica rotațională 83
8.6 Rotirea unui corp rotund pe un plan înclinat 84
9 Rotația 3D a corpurilor rigide 87
9.1 Tensorul momentului de inerție al unui corp rigid 87
9.2 Energia și momentul unghiular al unui corp asimetric 89
9.3 Giroscop 89
9.4 Forțele centrifuge și Coriolis 91
10 Gravitate 94
10.1 Legea gravitației lui Newton 94
10.2 Gravitația în apropierea corpurilor extinse 96
10.3 Forțele de maree 98
10.4 Problema Kepler 99
10.5 Parametrii orbitelor eliptice 101
10.6 Algoritm pentru calcularea traiectoriei unui corp ceresc 103
11 Armonice 104
11.1 Vibrații mici 104
11.2 Energia mișcării vibraționale 106
11.3 Adăugarea oscilațiilor unidimensionale. Bate 106
11.4 Adăugarea vibrațiilor reciproc perpendiculare 107
11.5 Oscilațiile pendulelor cuplate 108
12 Principiul relativității 112
12.1 Viteza luminii și postulatul lui Einstein 112
12.2 Transformări Lorentz 114
12.3 Consecințele transformărilor Lorentz 116
12.3.1 Relativitatea simultaneității 116
12.3.2 Relativitatea lungimii segmentelor 117
12.3.3 Relativitatea intervalelor de timp dintre evenimente. . 118
12.4 Adăugarea vitezei 119
12.5 Aberația luminii 120
13 Dinamica relativistă 122
13.1 Momentul relativist 122
13.2 Energia particulelor relativiste 123
13.3 Legea conservării energiei totale 124
13.4 Ciocnirea inelastică a două particule relativiste 126
13.5 Spațiu-timp cu patru dimensiuni 127
13.6 Produsul punctual al 4-vectori 129
13.7 Efect Doppler optic 131
Concluzia 134
Literatura 135
Acest manual conține 13 capitole privind principalele secțiuni de mecanică, prevăzute de standardul de bază al educației fizice pentru studenții specialităților tehnice ale universităților.
La nivel metodologic original, manualul conturează bazele metodei coordonatelor și ale aparatului conceptual vectorial al mecanicii, bazele cinematicii și dinamicii mișcării de translație și rotație a unui corp rigid, legile conservării energiei și impulsului mecanic. sisteme, mecanica fluidelor și a solidelor elastice, teoria clasică a gravitației și mișcării corpurilor cerești, proprietățile de bază ale oscilațiilor armonice, fundamentele fizice ale teoriei relativității speciale.
Conținutul capitolelor este o prezentare coerentă și consistentă a materialului, în care sunt evidențiate în mod special cele mai importante elemente: definiții de termeni noi, enunțuri care au forța teoremelor, fapte sau prevederi care necesită o atenție deosebită din partea cititorului. La sfârșitul fiecărui capitol este o listă de întrebări de control la care cititorul ar trebui să poată răspunde în timpul colocviului sau conversației cu profesorul.
Toate mărimile vectoriale din formule și text sunt indicate cu caractere aldine, de exemplu, vectorul viteză v. Produsul scalar al vectorilor este notat cu un punct între vectorii factor - Fv, iar produsul vectorial printr-o cruce - g xp. Parantezele din formulele matematice sunt folosite numai pentru gruparea standard a operațiilor matematice și desemnarea argumentelor funcției.
Acest manual de fizică este prezentat în limbajul cel mai concis, dar destul de informativ. În general, acest manual pare a fi util nu numai studenților din primul an, ci și tuturor absolvenților universităților tehnice. Profesorii de fizică vor găsi și noi abordări în prezentarea unor secțiuni.
Energia și impulsul sunt cele mai importante concepte din fizică. Se pare că legile de conservare joacă un rol important în natură în general. Căutarea cantităților conservate și a legilor din care acestea pot fi obținute este subiect de cercetare în multe ramuri ale fizicii. Să derivăm aceste legi în cel mai simplu mod din a doua lege a lui Newton.
Legea conservării impulsului.Puls, sau cantitatea de mișcarep definit ca produsul masei m punct material pe viteză V: p= mV. A doua lege a lui Newton, folosind definiția impulsului, este scrisă ca
= dp= F, (1.3.1)
Aici F este rezultanta forțelor aplicate corpului.
sistem închis numit sistem în care suma forțelor externe care acționează asupra corpului este egală cu zero:
F= å Fi= 0 . (1.3.2)
Atunci modificarea impulsului corpului într-un sistem închis conform celei de-a doua legi a lui Newton (1.3.1), (1.3.2) este
dp= 0 . (1.3.3)
În acest caz, impulsul sistemului de particule rămâne constant:
p= å pi= const . (1.3.4)
Această expresie este legea conservării impulsului, care se formulează astfel: când suma forțelor exterioare care acționează asupra unui corp sau a unui sistem de corpuri este egală cu zero, impulsul corpului sau al sistemului de corpuri este o valoare constantă.
Legea conservării energiei.În viața de zi cu zi, prin conceptul de „muncă” înțelegem orice muncă utilă a unei persoane. În fizică, se studiază munca mecanica, care apare numai atunci când corpul se mișcă sub acțiunea unei forțe. Lucrul mecanic ∆A este definit ca produsul scalar al forței F aplicat pe corp și deplasarea corpului Δ r ca urmare a acestei forțe:
A A= (F, Δ r) = F A r cosα. (1.3.5)
În formula (1.3.5), semnul muncii este determinat de semnul cos α.
Dorind să mutăm dulapul, apăsăm pe el cu forță, dar dacă nu se mișcă în același timp, atunci nu efectuăm lucrări mecanice. Ne putem imagina cazul în care corpul se mișcă fără participarea forțelor (prin inerție),
în acest caz nu se efectuează nici lucrări mecanice. Dacă un sistem de corpuri poate lucra, atunci are energie.
Energia este unul dintre cele mai importante concepte nu numai în mecanică, ci și în alte domenii ale fizicii: termodinamică și fizică moleculară, electricitate, optică, fizica atomică, nucleară și a particulelor.
În orice sistem aparținând lumii fizice, energia este conservată în orice proces. Numai forma în care trece se poate schimba. De exemplu, atunci când un glonț lovește o cărămidă, o parte din energia cinetică (mai mult, mai mult) este convertită în căldură. Motivul pentru aceasta este prezența unei forțe de frecare între glonț și cărămidă, în care se mișcă cu frecare mare. Când rotorul turbinei se rotește, energia mecanică este transformată în energie electrică și, în același timp, apare un curent într-un circuit închis. Energia eliberată în timpul arderii combustibililor chimici, de ex. energia legăturilor moleculare este transformată în energie termică. Natura energiei chimice este energia legăturilor intermoleculare și interatomice, reprezentând în esență energia moleculară sau atomică.
Energia este o mărime scalară care caracterizează capacitatea unui corp de a lucra:
E2-E1= ∆A. (1.3.6)
Când se efectuează lucrări mecanice, energia unui corp se schimbă de la o formă la alta. Energia unui corp poate fi sub formă de energie cinetică sau potențială.
Energia mișcării mecanice
W kin = .
numit energie kinetică mișcarea înainte a corpului. Lucrul și energia în sistemul SI de unități sunt măsurate în jouli (J).
Energia poate fi determinată nu numai de mișcarea corpurilor, ci și de aranjarea și forma lor reciprocă. Această energie se numește potenţial.
Energia potențială este deținută una față de cealaltă de două sarcini legate printr-un arc, sau de un corp situat la o anumită înălțime deasupra Pământului. Acest ultim exemplu se referă la energia potențială gravitațională atunci când un corp se mișcă de la o înălțime deasupra Pământului la alta. Se calculează după formula
energie mecanică.
Dependența impulsului de viteza de mișcare a două corpuri. Care corp are masa mai mare și cu cât? 1) Masele corpurilor sunt aceleași 2) Masa corpului 1 este de 3,5 ori mai mare 3) Masa corpului 2 este de 3,5 ori mai mare 4) Conform graficelor, masele corpurilor nu pot fi comparate
Mișcându-se cu viteza v, se ciocnește cu o minge de plastilină în repaus cu masa 2t. După impact, bilele se lipesc și se mișcă împreună. Care este viteza de mișcare a acestora? 1) v/3 2) 2v/3 3) v/2 4) Nu sunt suficiente date pentru a răspunde
Se deplasează de-a lungul unei căi ferate rectilinie cu viteze, a cărei dependență de proiecții pe o axă paralelă cu șinele în timp este prezentată în figură. După 20 de secunde, a avut loc o cuplare automată între mașini. Cu ce viteză și în ce direcție vor merge vagoanele cuplate? 1) 1,4 m/s, spre mișcarea inițială 1. 2) 0,2 m/s, spre mișcarea inițială 1. 3) 1,4 m/s, spre mișcarea inițială 2. 4) 0,2 m/s, în direcția mișcării inițiale 2.
Valoarea care arată ce muncă poate fi efectuată de corp Munca perfectă este egală cu schimbarea energiei corpului
După ecuația x: = 2 + 30 t - 2 t2, scrisă în SI. Greutate corporală 5 kg. Care este energia cinetică a corpului la 3 secunde după începerea mișcării? 1) 810 J 2) 1440 J 3) 3240 J 4) 4410 J
corp deformat
Se face lucrul 2 J. Ce lucru ar trebui făcut pentru a întinde arcul încă 4 cm 1) 16 J 2) 4 J 3) 8 J 4) 2 J
Să se determine energia cinetică Ek pe care o are corpul în vârful traiectoriei (vezi figura)? 1) EK=mgH 2) EK=m(V0)2/2 + mgh-mgH 3) EK=mgH-mgh 4) EK=m(V0)2/2 + mgH
aceeași viteză inițială. Prima dată vectorul viteză al mingii a fost îndreptat vertical în jos, a doua oară - vertical în sus, a treia oară - orizontal. Ignorați rezistența aerului. Modulul vitezei mingii la apropierea de sol va fi: 1) mai mare în primul caz 2) mai mult în al doilea caz 3) mai mult în al treilea caz 4) același în toate cazurile
Fotografie a configurației pentru studierea alunecării unui cărucior cu o greutate de 40 g de-a lungul unui plan înclinat la un unghi de 30º. În momentul începerii mișcării, senzorul superior pornește cronometrul. Când căruciorul trece de senzorul de jos, cronometrul se oprește. Estimați cantitatea de căldură eliberată pe măsură ce căruciorul alunecă în jos pe planul înclinat dintre senzori.
Se coboară de la punctul 1 la punctul 3 (Fig.). În ce punct al traiectoriei energia sa cinetică are cea mai mare valoare? 1) La punctul 1. 2) La punctul 2. 3) La punctul 3. 4) În toate punctele, valorile energiei sunt aceleași.
Ele se ridică de-a lungul pantei opuse până la o înălțime de 2 m (până la punctul 2 din figură) și se opresc. Greutatea saniei este de 5 kg. Viteza lor în fundul râpei era de 10 m/s. Cum s-a schimbat energia mecanică totală a saniei când s-a mutat de la punctul 1 la punctul 2? 1) Nu s-a schimbat. 2) Creștere cu 100 J. 3) Diminuată cu 100 J. 4) Diminuată cu 150 J. 2
impulsul corpului
Momentul unui corp este o mărime egală cu produsul dintre masa corpului și viteza acestuia.
De reținut că vorbim despre un corp care poate fi reprezentat ca punct material. Elanul unui corp ($p$) se mai numește și impulsul. Conceptul de impuls a fost introdus în fizică de René Descartes (1596-1650). Termenul „impuls” a apărut mai târziu (impulsus în latină înseamnă „împingere”). Momentul este o mărime vectorială (cum ar fi viteza) și este exprimată prin formula:
$p↖(→)=mυ↖(→)$
Direcția vectorului impuls coincide întotdeauna cu direcția vitezei.
Unitatea de impuls în SI este impulsul unui corp cu o masă de $1$ kg care se mișcă cu o viteză de $1$ m/s, prin urmare, unitatea de impuls este $1$ kg $·$ m/s.
Dacă o forță constantă acționează asupra unui corp (punct material) în intervalul de timp $∆t$, atunci și accelerația va fi constantă:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
unde, $(υ_1)↖(→)$ și $(υ_2)↖(→)$ sunt vitezele inițiale și finale ale corpului. Înlocuind această valoare în expresia celei de-a doua legi a lui Newton, obținem:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Deschizând parantezele și folosind expresia pentru impulsul corpului, avem:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Aici $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ este modificarea impulsului în timp $∆t$. Atunci ecuația anterioară devine:
$∆p↖(→)=F↖(→)∆t$
Expresia $∆p↖(→)=F↖(→)∆t$ este o reprezentare matematică a celei de-a doua legi a lui Newton.
Produsul unei forțe și durata ei se numește impuls de forță. Asa de modificarea impulsului unui punct este egală cu modificarea impulsului forței care acționează asupra acestuia.
Expresia $∆p↖(→)=F↖(→)∆t$ se numește ecuația mișcării corpului. Trebuie remarcat faptul că aceeași acțiune - o modificare a impulsului unui punct - poate fi obținută printr-o forță mică într-o perioadă lungă de timp și printr-o forță mare într-o perioadă mică de timp.
Impulsul sistemului tel. Legea schimbării impulsului
Impulsul (impulsul) unui sistem mecanic este un vector egal cu suma impulsurilor tuturor punctelor materiale ale acestui sistem:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Legile schimbării și conservării impulsului sunt o consecință a celei de-a doua și a treia legi a lui Newton.
Luați în considerare un sistem format din două corpuri. Forțele ($F_(12)$ și $F_(21)$ din figură, cu care corpurile sistemului interacționează între ele, se numesc interne.
Fie ca, pe lângă forțele interne, forțele externe $(F_1)↖(→)$ și $(F_2)↖(→)$ acționează asupra sistemului. Pentru fiecare corp se poate scrie ecuația $∆p↖(→)=F↖(→)∆t$. Adăugând părțile din stânga și din dreapta acestor ecuații, obținem:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Conform celei de-a treia legi a lui Newton $(F_(12))↖(→)=-(F_(21))↖(→)$.
Prin urmare,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
În partea stângă se află suma geometrică a modificărilor impulsului tuturor corpurilor sistemului, egală cu modificarea impulsului sistemului însuși - $(∆p_(syst))↖(→)$. Având în vedere acest lucru , egalitatea $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ poate fi scrisă:
$(∆p_(sys))↖(→)=F↖(→)∆t$
unde $F↖(→)$ este suma tuturor forțelor externe care acționează asupra corpului. Rezultatul obținut înseamnă că numai forțele externe pot modifica impulsul sistemului, iar modificarea impulsului sistemului este direcționată în același mod ca și forța externă totală. Aceasta este esența legii schimbării în impulsul unui sistem mecanic.
Forțele interne nu pot schimba impulsul total al sistemului. Ele schimbă doar impulsurile corpurilor individuale ale sistemului.
Legea conservării impulsului
Din ecuația $(∆p_(syst))↖(→)=F↖(→)∆t$ urmează legea conservării impulsului. Dacă asupra sistemului nu acționează forțe externe, atunci partea dreaptă a ecuației $(∆p_(syst))↖(→)=F↖(→)∆t$ dispare, ceea ce înseamnă că impulsul total al sistemului rămâne neschimbat. :
$(∆p_(sys))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Se numește un sistem asupra căruia nu acționează forțe externe sau rezultanta forțelor externe este egală cu zero închis.
Legea conservării impulsului spune:
Momentul total al unui sistem închis de corpuri rămâne constant pentru orice interacțiune a corpurilor sistemului între ele.
Rezultatul obţinut este valabil pentru un sistem care conţine un număr arbitrar de corpuri. Dacă suma forțelor externe nu este egală cu zero, dar suma proiecțiilor lor pe o anumită direcție este egală cu zero, atunci proiecția impulsului sistemului pe această direcție nu se modifică. Deci, de exemplu, un sistem de corpuri de pe suprafața Pământului nu poate fi considerat închis din cauza forței gravitaționale care acționează asupra tuturor corpurilor, cu toate acestea, suma proiecțiilor impulsurilor pe direcția orizontală poate rămâne neschimbată (în absență de frecare), deoarece în această direcție forța gravitației nu este valabilă.
Propulsie cu reacție
Luați în considerare exemple care confirmă validitatea legii conservării impulsului.
Să luăm un balon de cauciuc pentru copii, să-l umflem și să-l dăm drumul. Vom vedea că atunci când aerul începe să iasă dintr-o direcție, balonul însuși va zbura în cealaltă direcție. Mișcarea mingii este un exemplu de propulsie cu reacție. Se explică prin legea conservării impulsului: impulsul total al sistemului „minge plus aer în ea” înainte de scurgerea aerului este zero; trebuie să rămână egal cu zero în timpul mișcării; prin urmare, bila se mișcă în direcția opusă direcției de ieșire a jetului și cu o astfel de viteză încât impulsul său este egal în valoare absolută cu impulsul jetului de aer.
propulsie cu reacție numită mișcarea unui corp care are loc atunci când o parte a acestuia se separă de el cu o anumită viteză. Datorită legii conservării impulsului, direcția de mișcare a corpului este opusă direcției de mișcare a părții separate.
Zborurile cu rachete se bazează pe principiul propulsiei cu reacție. O rachetă spațială modernă este o aeronavă foarte complexă. Masa rachetei este suma masei fluidului de lucru (adică gazele fierbinți rezultate din arderea combustibilului și ejectate sub formă de jet) și masa finală sau, după cum se spune, „uscata” a rachetei, rămânând după ejectarea fluidului de lucru din rachetă.
Atunci când un jet de gaz reactiv este aruncat dintr-o rachetă cu viteză mare, racheta însăși se repezi în direcția opusă. Conform legii conservării impulsului, impulsul $m_(p)υ_p$ dobândit de rachetă trebuie să fie egal cu impulsul $m_(gaz) υ_(gaz)$ al gazelor ejectate:
$m_(p)υ_p=m_(gaz) υ_(gaz)$
Rezultă că viteza rachetei
$υ_p=((m_(gaz))/(m_p)) υ_(gaz)$
Din această formulă se poate observa că cu cât viteza rachetei este mai mare, cu atât viteza gazelor ejectate este mai mare și raportul dintre masa fluidului de lucru (adică masa combustibilului) și cea finală ("uscat"). masa rachetei.
Formula $υ_p=((m_(gaz))/(m_p))·υ_(gaz)$ este aproximativă. Nu ia în considerare faptul că pe măsură ce combustibilul arde, masa rachetei zburătoare devine din ce în ce mai mică. Formula exactă pentru viteza unei rachete a fost obținută în 1897 de K. E. Tsiolkovsky și îi poartă numele.
Munca de forță
Termenul „muncă” a fost introdus în fizică în 1826 de către omul de știință francez J. Poncelet. Dacă în viața de zi cu zi numai munca umană se numește muncă, atunci în fizică și, în special, în mecanică, este general acceptat că munca se face cu forța. Cantitatea fizică de muncă este de obicei indicată cu litera $A$.
Munca de forță- aceasta este o măsură a acțiunii unei forțe, în funcție de modulul și direcția acesteia, precum și de deplasarea punctului de aplicare a forței. Pentru o forță constantă și o mișcare rectilinie, munca este determinată de egalitatea:
$A=F|∆r↖(→)|cosα$
unde $F$ este forța care acționează asupra corpului, $∆r↖(→)$ este deplasarea, $α$ este unghiul dintre forță și deplasare.

Lucrul forței este egal cu produsul dintre modulele forței și deplasării și cosinusul unghiului dintre ele, adică produsul scalar al vectorilor $F↖(→)$ și $∆r↖(→)$.
Munca este o mărime scalară. Dacă $α 0$, iar dacă $90°
Când mai multe forțe acționează asupra unui corp, munca totală (suma muncii tuturor forțelor) este egală cu munca forței rezultate.
Unitatea de lucru SI este joule($1$ J). $1$ J este munca efectuată de o forță de $1$ N pe o cale de $1$ m în direcția acestei forțe. Această unitate este numită după omul de știință englez J. Joule (1818-1889): $1$ J = $1$ N $·$ m. Kilojulii și milijoulii sunt, de asemenea, adesea folosiți: $1$ kJ $= 1.000$ J, $1$ mJ $ = 0,001 $ J.
Lucrarea gravitației
Să considerăm un corp care alunecă de-a lungul unui plan înclinat cu un unghi de înclinare $α$ și o înălțime $H$.

Exprimăm $∆x$ în termeni de $H$ și $α$:
$∆x=(H)/(sinα)$
Considerând că gravitația $F_т=mg$ formează un unghi ($90° - α$) cu direcția de mișcare, folosind formula $∆x=(H)/(sin)α$, obținem o expresie pentru lucrul gravitației $A_g$:
$A_g=mg cos(90°-α)(H)/(sinα)=mgH$
Din această formulă se poate observa că munca gravitației depinde de înălțime și nu depinde de unghiul de înclinare al planului.
Din aceasta rezultă că:
- munca gravitației nu depinde de forma traiectoriei de-a lungul căreia se mișcă corpul, ci doar de poziția inițială și finală a corpului;
- când un corp se mișcă pe o traiectorie închisă, munca gravitației este zero, adică gravitația este o forță conservativă (forțele care au această proprietate se numesc conservatoare).
Lucrarea forțelor de reacție, este zero deoarece forța de reacție ($N$) este direcționată perpendicular pe deplasarea $∆x$.
Lucrul forței de frecare
Forța de frecare este îndreptată opus deplasării $∆x$ și formează cu ea un unghi $180°$, deci munca forței de frecare este negativă:
$A_(tr)=F_(tr)∆x cos180°=-F_(tr) ∆x$
Deoarece $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ atunci
$A_(tr)=μmgHctgα$
Lucrul forței elastice
Fie ca o forță exterioară $F↖(→)$ să acționeze asupra unui arc neîntins de lungime $l_0$, întinzându-l cu $∆l_0=x_0$. In pozitia $x=x_0F_(control)=kx_0$. După terminarea forţei $F↖(→)$ în punctul $x_0$, arcul este comprimat sub acţiunea forţei $F_(control)$.

Să determinăm lucrul forței elastice atunci când coordonatele capătului drept al arcului se schimbă de la $х_0$ la $х$. Deoarece forța elastică din această zonă se modifică liniar, în legea lui Hooke, valoarea sa medie în această zonă poate fi utilizată:
$F_(ex.av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Atunci lucrarea (ținând cont de faptul că direcțiile $(F_(exp.av.))↖(→)$ și $(∆x)↖(→)$ coincid) este egală cu:
$A_(exercițiu)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Se poate arăta că forma ultimei formule nu depinde de unghiul dintre $(F_(exp.av.))↖(→)$ și $(∆x)↖(→)$. Munca fortelor elastice depinde numai de deformatiile arcului in starea initiala si finala.
Astfel, forța elastică, ca și gravitația, este o forță conservativă.
Puterea forței
Puterea este o mărime fizică măsurată prin raportul dintre muncă și perioada de timp în care este produsă.
Cu alte cuvinte, puterea arată cât de mult se lucrează pe unitatea de timp (în SI, pentru $1$ s).
Puterea este determinată de formula:
unde $N$ este puterea, $A$ este munca efectuată în timpul $∆t$.
Înlocuind $A=F|(∆r)↖(→)|cosα$ în formula $N=(A)/(∆t)$ în locul lucrării $A$, obținem:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Puterea este egală cu produsul dintre modulele vectorilor forță și viteză și cosinusul unghiului dintre acești vectori.
Puterea din sistemul SI este măsurată în wați (W). Un watt ($1$ W) este puterea la care se efectuează $1$ J de lucru în $1$ s: $1$ W $= 1$ J/s.
Această unitate poartă numele inventatorului englez J. Watt (Watt), care a construit primul motor cu abur. Însuși J. Watt (1736-1819) a folosit o unitate diferită de putere - cai putere (CP), pe care a introdus-o pentru a putea compara performanța unui motor cu abur și a unui cal: $ 1 $ CP. $= 735,5 $ mar.
În tehnologie, sunt adesea folosite unități mai mari de putere - kilowați și megawați: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
Energie kinetică. Legea modificării energiei cinetice
Dacă un corp sau mai multe corpuri care interacționează (un sistem de corpuri) pot lucra, atunci ei spun că au energie.
Cuvântul „energie” (din greacă. energia – acțiune, activitate) este adesea folosit în viața de zi cu zi. Deci, de exemplu, oamenii care pot lucra rapid se numesc energici, cu o mare energie.
Energia deținută de un corp datorită mișcării se numește energie cinetică.
Ca și în cazul definiției energiei în general, putem spune despre energia cinetică că energia cinetică este capacitatea unui corp în mișcare de a lucra.
Să aflăm energia cinetică a unui corp de masă $m$ care se mișcă cu o viteză de $υ$. Deoarece energia cinetică este energia datorată mișcării, starea zero pentru aceasta este starea în care corpul este în repaus. După ce am găsit munca necesară pentru a comunica corpului o viteză dată, vom găsi energia cinetică a acestuia.
Pentru aceasta, calculăm munca efectuată pe secțiunea de deplasare $∆r↖(→)$ când direcțiile vectorilor forțe $F↖(→)$ și deplasarea $∆r↖(→)$ coincid. În acest caz, munca este
unde $∆x=∆r$

Pentru mișcarea unui punct cu accelerația $α=const$, expresia pentru mișcare are forma:
$∆x=υ_1t+(la^2)/(2),$
unde $υ_1$ este viteza inițială.
Înlocuind expresia pentru $∆x$ din $∆x=υ_1t+(at^2)/(2)$ în ecuația $A=F ∆x$ și folosind a doua lege a lui Newton $F=ma$, obținem:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Exprimând accelerația în termeni de viteze inițiale $υ_1$ și finale $υ_2$ $a=(υ_2-υ_1)/(t)$ și înlocuirea în $A=ma(υ_1t+(at^2)/(2))=( mat)/ (2)(2υ_1+at)$ avem:
$A=(m(υ_2-υ_1))/(2) (2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Acum echivalând viteza inițială cu zero: $υ_1=0$, obținem o expresie pentru energie kinetică:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Astfel, un corp în mișcare are energie cinetică. Această energie este egală cu munca care trebuie făcută pentru a crește viteza corpului de la zero la $υ$.
Din $E_K=(mυ)/(2)=(p^2)/(2m)$ rezultă că munca unei forțe pentru a muta un corp dintr-o poziție în alta este egală cu modificarea energiei cinetice:
$A=E_(K_2)-E_(K_1)=∆E_K$
Egalitatea $A=E_(K_2)-E_(K_1)=∆E_K$ exprimă teorema privind modificarea energiei cinetice.
Modificarea energiei cinetice a corpului(punct material) pentru o anumită perioadă de timp este egală cu munca efectuată în acest timp de forța care acționează asupra corpului.
Energie potențială
Energia potențială este energia determinată de aranjarea reciprocă a corpurilor sau părților aceluiași corp care interacționează.
Deoarece energia este definită ca abilitatea unui corp de a lucra, energia potențială este definită în mod natural ca munca unei forțe care depinde doar de poziția relativă a corpurilor. Aceasta este munca gravitației $A=mgh_1-mgh_2=mgH$ și munca elasticității:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Energia potențială a corpului interacțiunea cu Pământul se numește valoarea egală cu produsul dintre masa $m$ a acestui corp și accelerația căderii libere $g$ și înălțimea $h$ a corpului deasupra suprafeței Pământului:
Energia potențială a unui corp deformat elastic este valoarea egală cu jumătate din produsul dintre coeficientul de elasticitate (rigiditatea) $k$ al corpului și pătratul deformației $∆l$:
$E_p=(1)/(2)k∆l^2$
Lucrarea forțelor conservatoare (gravitație și elasticitate), ținând cont de $E_p=mgh$ și $E_p=(1)/(2)k∆l^2$, se exprimă astfel:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Această formulă ne permite să oferim o definiție generală a energiei potențiale.
Energia potențială a sistemului este o mărime care depinde de poziția corpurilor, a cărei schimbare în timpul tranziției sistemului de la starea inițială la starea finală este egală cu munca forțelor conservatoare interne ale sistemului, luate cu semnul opus.
Semnul minus din partea dreaptă a ecuației $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ înseamnă că atunci când munca este efectuată de forțe interne ( de exemplu, căderea corpului la pământ sub acțiunea gravitației în sistemul „piatră-Pământ”), energia sistemului scade. Munca și schimbarea energiei potențiale într-un sistem au întotdeauna semne opuse.
Deoarece munca determină doar schimbarea energiei potențiale, numai schimbarea energiei are sens fizic în mecanică. Prin urmare, alegerea nivelului de energie zero este arbitrară și este determinată numai de considerente de comoditate, de exemplu, ușurința de a scrie ecuațiile corespunzătoare.
Legea schimbării și conservării energiei mecanice
Energia mecanică totală a sistemului suma energiilor sale cinetice și potențiale se numește:
Este determinată de poziția corpurilor (energia potențială) și viteza acestora (energia cinetică).
Conform teoremei energiei cinetice,
$E_k-E_(k_1)=A_p+A_(pr),$
unde $А_р$ este munca forțelor potențiale, $А_(pr)$ este munca forțelor nepotențiale.
La rândul său, munca forțelor potențiale este egală cu diferența de energie potențială a corpului în stările inițiale $E_(p_1)$ și finale $E_p$. Având în vedere acest lucru, obținem o expresie pentru legea schimbarii energiei mecanice:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
unde partea stângă a egalității este modificarea energiei mecanice totale, iar partea dreaptă este opera forțelor nepotențiale.
Asa de, legea schimbarii energiei mecanice citeste:
Modificarea energiei mecanice a sistemului este egală cu munca tuturor forțelor nepotențiale.
Un sistem mecanic în care acționează numai forțe potențiale se numește conservator.
Într-un sistem conservator $A_(pr) = 0$. asta implică legea conservării energiei mecanice:
Într-un sistem conservator închis, energia mecanică totală este conservată (nu se modifică în timp):
$E_k+E_p=E_(k_1)+E_(p_1)$
Legea conservării energiei mecanice este derivată din legile mecanicii newtoniene, care sunt aplicabile unui sistem de puncte materiale (sau macroparticule).
Totuși, legea conservării energiei mecanice este valabilă și pentru un sistem de microparticule, unde legile lui Newton în sine nu se mai aplică.
Legea conservării energiei mecanice este o consecință a omogenității timpului.
Uniformitatea timpului este că, în aceleași condiții inițiale, cursul proceselor fizice nu depinde de momentul în care se creează aceste condiții.
Legea conservării energiei mecanice totale înseamnă că atunci când energia cinetică într-un sistem conservator se modifică, trebuie să se modifice și energia potențială a acestuia, astfel încât suma lor să rămână constantă. Aceasta înseamnă posibilitatea de a converti un tip de energie în altul.
În conformitate cu diferitele forme de mișcare a materiei, se consideră diferite tipuri de energie: mecanică, internă (egale cu suma energiei cinetice a mișcării haotice a moleculelor în raport cu centrul de masă al corpului și energia potențială a interacțiunea moleculelor între ele), electromagnetică, chimică (care constă din energia cinetică a mișcării electronilor și electrică din energia interacțiunii lor între ele și cu nucleele atomice), energia nucleară etc. Se poate observa din mai sus că împărțirea energiei în diferite tipuri este destul de arbitrară.
Fenomenele naturale sunt de obicei însoțite de transformarea unui tip de energie în altul. Deci, de exemplu, frecarea părților diferitelor mecanisme duce la conversia energiei mecanice în căldură, adică în energie interna.În motoarele termice, dimpotrivă, energia internă este transformată în energie mecanică; în celulele galvanice, energia chimică este transformată în energie electrică etc.
În prezent, conceptul de energie este unul dintre conceptele de bază ale fizicii. Acest concept este indisolubil legat de ideea transformării unei forme de mișcare în alta.
Iată cum este formulat conceptul de energie în fizica modernă:
Energia este o măsură cantitativă generală a mișcării și interacțiunii tuturor tipurilor de materie. Energia nu ia naștere din nimic și nu dispare, ea poate trece doar de la o formă la alta. Conceptul de energie leagă împreună toate fenomenele naturii.
mecanisme simple. eficienta mecanismului
Mecanismele simple sunt dispozitive care modifică amploarea sau direcția forțelor aplicate corpului.
Sunt folosite pentru a muta sau ridica încărcături mari cu puțin efort. Acestea includ pârghia și varietățile sale - blocuri (mobile și fixe), o poartă, un plan înclinat și varietățile sale - o pană, un șurub etc.
Maneta. Regula pârghiei
Pârghia este un corp rigid capabil să se rotească în jurul unui suport fix.

Regula efectului de pârghie spune:
O pârghie este în echilibru dacă forțele aplicate acesteia sunt invers proporționale cu brațele lor:
$(F_2)/(F_1)=(l_1)/(l_2)$
Din formula $(F_2)/(F_1)=(l_1)/(l_2)$, aplicându-i proprietatea proporției (produsul termenilor extremi ai proporției este egal cu produsul termenilor ei medii), avem se poate obtine urmatoarea formula:
Dar $F_1l_1=M_1$ este momentul forței care tinde să rotească pârghia în sensul acelor de ceasornic, iar $F_2l_2=M_2$ este momentul forței care tinde să rotească pârghia în sens invers acelor de ceasornic. Astfel, $M_1=M_2$, ceea ce urma să fie demonstrat.
Pârghia a început să fie folosită de oameni în cele mai vechi timpuri. Cu ajutorul acestuia, a fost posibilă ridicarea plăcilor grele de piatră în timpul construcției piramidelor din Egiptul antic. Fără pârghie, acest lucru nu ar fi fost posibil. Până la urmă, de exemplu, pentru construcția piramidei lui Keops, care are o înălțime de 147$ m, s-au folosit peste două milioane de blocuri de piatră, dintre care cel mai mic avea o masă de 2,5$ tone!
În zilele noastre, pârghiile sunt utilizate pe scară largă atât în producție (de exemplu, macarale), cât și în viața de zi cu zi (foarfece, tăietori de sârmă, cântare).
Bloc fix
Acțiunea unui bloc fix este similară cu acțiunea unei pârghii cu pârghie egală: $l_1=l_2=r$. Forța aplicată $F_1$ este egală cu sarcina $F_2$, iar starea de echilibru este:
Bloc fix folosit atunci când trebuie să schimbați direcția unei forțe fără a-i modifica magnitudinea.
Bloc mobil
Blocul mobil acționează similar unei pârghii, ale cărei brațe sunt: $l_2=(l_1)/(2)=r$. În acest caz, starea de echilibru are forma:
unde $F_1$ este forța aplicată, $F_2$ este sarcina. Utilizarea unui bloc mobil oferă un câștig în forță de două ori.
Polyspast (sistem de blocuri)
Un palan obișnuit cu lanț este format din $n$ blocuri mobile și $n$ blocuri fixe. Aplicarea acestuia oferă un câștig în putere de 2n$ de ori:
$F_1=(F_2)/(2n)$
Palan cu lanț electric constă din n bloc mobil și un bloc fix. Utilizarea unui palan cu lanț oferă un câștig în putere de $2^n$ ori:
$F_1=(F_2)/(2^n)$

Şurub
Șurubul este un plan înclinat înfășurat pe axă.

Condiția pentru echilibrarea forțelor care acționează asupra șurubului are forma:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

unde $F_1$ este o forță externă aplicată șurubului și care acționează la o distanță $R$ de axa acestuia; $F_2$ este forța care acționează în direcția axei șurubului; $h$ - pasul șurubului; $r$ este raza medie a firului; $α$ este unghiul firului. $R$ este lungimea pârghiei (cheii) care rotește șurubul cu forța $F_1$.
Eficienţă
Coeficientul de performanță (COP) - raportul dintre munca utilă și toată munca cheltuită.
Eficiența este adesea exprimată ca procent și notat cu litera greacă $η$ ("aceasta"):
$η=(A_p)/(A_3) 100%$
unde $A_n$ este munca utilă, $A_3$ este toată munca cheltuită.
Munca utilă este întotdeauna doar o parte din munca totală pe care o cheltuiește o persoană utilizând acest sau acel mecanism.
O parte din munca depusă este cheltuită pentru depășirea forțelor de frecare. Deoarece $А_3 > А_п$, eficiența este întotdeauna mai mică de $1$ (sau $< 100%$).
Deoarece fiecare dintre lucrările din această ecuație poate fi exprimată ca produsul dintre forța corespunzătoare și distanța parcursă, ea poate fi rescrisă după cum urmează: $F_1s_1≈F_2s_2$.
De aici rezultă că, câștigând cu ajutorul mecanismului în vigoare, pierdem același număr de ori pe parcurs și invers. Această lege se numește regula de aur a mecanicii.
Regula de aur a mecanicii este o lege aproximativă, deoarece nu ia în considerare munca de depășire a frecării și gravitației pieselor dispozitivelor utilizate. Cu toate acestea, poate fi foarte util atunci când se analizează funcționarea oricărui mecanism simplu.

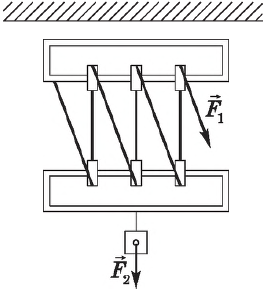
Deci, de exemplu, datorită acestei reguli, putem spune imediat că muncitorul prezentat în figură, cu un câștig dublu în forța de ridicare de $10$ cm, va trebui să coboare capătul opus al pârghiei cu $20$ cm.
Ciocnirea corpurilor. Impacturi elastice și inelastice
Legile conservării impulsului și energiei mecanice sunt folosite pentru a rezolva problema mișcării corpurilor după o coliziune: momentele și energiile cunoscute înainte de ciocnire sunt folosite pentru a determina valorile acestor mărimi după ciocnire. Luați în considerare cazurile de impact elastic și inelastic.
Se numește impact absolut inelastic, după care corpurile formează un singur corp care se mișcă cu o anumită viteză. Problema vitezei acestuia din urmă se rezolvă folosind legea conservării impulsului pentru un sistem de corpuri cu mase $m_1$ și $m_2$ (dacă vorbim de două corpuri) înainte și după impact:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
În mod evident, energia cinetică a corpurilor nu este conservată în timpul unui impact inelastic (de exemplu, la $(υ_1)↖(→)=-(υ_2)↖(→)$ și $m_1=m_2$ devine egală cu zero după impact).
Se numește impact absolut elastic, în care nu se păstrează doar suma impulsurilor, ci și suma energiilor cinetice ale corpurilor care se ciocnesc.
Pentru un impact absolut elastic, ecuațiile
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2) )^2)/(2)$
unde $m_1, m_2$ sunt masele bilelor, $υ_1, υ_2$ sunt vitezele bilelor înainte de impact, $υ"_1, υ"_2$ sunt vitezele bilelor după impact.
