E completo \u003d E kin + U
E kin \u003d mv 2 / 2 + Jw 2 / 2 - energia cinética do movimento de translação e rotação,
U = mgh é a energia potencial de um corpo de massa m a uma altura h acima da superfície da Terra.
F tr \u003d kN - força de atrito deslizante, N - força de pressão normal, k - coeficiente de atrito.
No caso de um impacto fora do centro, a lei da conservação da quantidade de movimento
S p eu= const é escrito em projeções nos eixos coordenados.
A lei da conservação do momento angular e a lei da dinâmica do movimento rotacional
S Li= const é a lei de conservação do momento angular,
L OS \u003d Jw - momento angular axial,
L orbe = [ rp] é o momento angular orbital,
dL/dt=SM ext - a lei da dinâmica do movimento rotacional,
M= [RF] = rFsina – momento da força, F – força, a – ângulo entre o raio-vetor e a força.
A \u003d òMdj - trabalho durante o movimento rotacional.
Seção de mecânica
Cinemática
Tarefa
Tarefa. A dependência do caminho percorrido pelo corpo no tempo é dada pela equação s = A–Bt+Ct 2 . Encontre a velocidade e a aceleração do corpo no instante t.
Exemplo de solução
v \u003d ds / dt \u003d -B + 2Ct, a \u003d dv / dt \u003d ds 2 / dt 2 \u003d 2C.
Opções
1.1. A dependência do caminho percorrido pelo corpo no tempo é dada por
a equação s \u003d A + Bt + Ct 2, onde A \u003d 3m, B \u003d 2 m / s, C \u003d 1 m / s 2.
Encontre a velocidade no terceiro segundo.
2.1. A dependência do caminho percorrido pelo corpo no tempo é dada por
a equação s \u003d A + Bt + Ct 2 + Dt 3, onde C \u003d 0,14m / s 2 e D \u003d 0,01 v / c 3.
Depois de quanto tempo após o início do movimento, a aceleração do corpo
será igual a 1 m/s 2.
3.1. A roda, girando uniformemente acelerada, atingiu a velocidade angular
20 rad/s através de N = 10 revoluções após o início do movimento. Encontrar
aceleração angular da roda.
4.1. Uma roda com um raio de 0,1 m gira de modo que a dependência do ângulo
j \u003d A + Bt + Ct 3, onde B \u003d 2 rad / s e C \u003d 1 rad / s 3. Para pontos mentindo
no aro da roda, encontre após 2 s após o início do movimento:
1) velocidade angular, 2) velocidade linear, 3) angular
aceleração, 4) aceleração tangencial.
5.1. Uma roda com raio de 5 cm gira de modo que a dependência do ângulo
a rotação do raio da roda em função do tempo é dada pela equação
j \u003d A + Bt + Ct 2 + Dt 3, onde D \u003d 1 rad / s 3. Encontrar pontos mentindo
no aro da roda, a mudança na aceleração tangencial para
cada segundo de movimento.
6.1. Uma roda com raio de 10 cm gira de modo que a dependência
velocidade linear dos pontos situados no aro da roda, de
o tempo é dado pela equação v \u003d At + Bt 2, onde A \u003d 3 cm / s 2 e
B \u003d 1 cm / s 3. Encontre o ângulo formado pelo vetor da
aceleração com raio da roda no instante t = 5s após
início do movimento.
7.1. A roda gira de modo que a dependência do ângulo de rotação do raio
roda versus tempo é dado pela equação j =A +Bt +Ct 2 +Dt 3 , onde
B \u003d 1 rad / s, C \u003d 1 rad / s 2, D \u003d 1 rad / s 3. Encontre o raio da roda,
se for sabido que ao final do segundo segundo de movimento
a aceleração normal dos pontos situados no aro da roda é
e n \u003d 346 m / s 2.
8.1. O vetor de raio de um ponto material muda com o tempo de acordo com
lei R=t 3 EU+ t2 j. Determine para o momento t = 1 s:
módulo de velocidade e módulo de aceleração.
9.1. O vetor de raio de um ponto material muda com o tempo de acordo com
lei R=4t2 EU+ 3t j+2para. Escreva uma expressão para um vetor
velocidade e aceleração. Determine para o tempo t = 2 s
módulo de velocidade.
10.1. Um ponto se move no plano xy de uma posição com coordenadas
x 1 = y 1 = 0 com velocidade v= A eu+Bx j. Definir equação
a trajetória do ponto y(x) e a forma da trajetória.
Momento de inércia
distância L/3 do início da haste.
Exemplo de solução.
M - massa da haste J = J st + J gr
L - comprimento da haste J st1 \u003d mL 2/12 - momento de inércia da haste
2m é o peso do peso em relação ao seu centro. Por teorema
Steiner encontrar o momento de inércia
J=? haste em relação ao eixo o, espaçada do centro por uma distância a = L/2 - L/3 = L/6.
J st \u003d mL 2 / 12 + m (L / 6) 2 \u003d mL 2 / 9.
De acordo com o princípio da superposição
J \u003d mL 2 / 9 + 2m (2L / 3) 2 \u003d mL 2.
Opções
1.2. Determine o momento de inércia de uma barra de massa 2m em relação a um eixo espaçado do início da barra por uma distância L/4. Na extremidade da haste, a massa concentrada m.
2.2. Determine o momento de inércia da haste com massa m em relação a
eixo espaçado do início da haste a uma distância L / 5. No final
massa concentrada da haste 2m.
3.2. Determine o momento de inércia de uma barra de massa 2m em relação a um eixo espaçado do início da barra por uma distância L/6. Na extremidade da haste, a massa concentrada m.
4.2. Determine o momento de inércia de uma barra de massa 3m em relação a um eixo espaçado do início da barra por uma distância L/8. Na extremidade da haste, a massa concentrada é 2m.
5.2. Determine o momento de inércia de uma barra de massa 2m em relação ao eixo que passa pelo início da barra. As massas concentradas m estão presas à extremidade e ao meio da haste.
6.2. Determine o momento de inércia de uma barra de massa 2m em relação ao eixo que passa pelo início da barra. Uma massa concentrada 2m está presa à extremidade da haste e uma massa concentrada 2m está presa ao meio.
7.2. Determine o momento de inércia da barra de massa m em relação ao eixo, que é L/4 a partir do início da barra. As massas concentradas m estão presas à extremidade e ao meio da haste.
8.2. Encontre o momento de inércia de um anel fino e homogêneo de massa m e raio r em relação a um eixo situado no plano do anel e espaçado de seu centro por r/2.
9.2. Encontre o momento de inércia de um disco fino e homogêneo de massa m e raio r em relação a um eixo situado no plano do disco e espaçado de seu centro por r/2.
10.2. Encontre o momento de inércia de uma bola homogênea de massa m e raio
r em relação ao eixo espaçado de seu centro por r/2.
Tomsk: TUSUR, 2012.- 136 p.
Este manual contém 13 capítulos sobre as principais seções de mecânica, fornecidas pela norma básica de educação física para alunos de especialidades técnicas de universidades. No nível metodológico original, o manual delineia os fundamentos do método de coordenadas e o aparato conceitual vetorial da mecânica, os fundamentos da cinemática e dinâmica do movimento de translação e rotação de um corpo rígido, as leis de conservação de energia e momento da mecânica sistemas; mecânica da matéria sólida líquida e elástica, teoria clássica da gravidade e movimento dos corpos celestes, propriedades básicas das oscilações harmônicas, fundamentos físicos da relatividade especial. Este manual de física é apresentado na linguagem mais concisa, mas bastante informativa. Em geral, este manual parece ser útil não apenas para alunos do primeiro ano, mas também para todos os graduados de universidades técnicas. Os professores de física também encontrarão novas abordagens na apresentação de algumas seções.
Formato: pdf
O tamanho: 1,7 MB
Assista, baixe:yandex.disk
ÍNDICE
Introdução 6
1 Método de coordenadas. Vetores 9
1.1 Definições de termos físicos primários 9
1.2 Sistema de coordenadas 10
1.3 Velocidade e aceleração 11
1.4 Mudança de coordenadas como integral da velocidade 12
1.5 Generalização para o caso do movimento tridimensional 13
1.6 Vetores 14
1.7 Álgebra Vetorial 16
2 Cinemática do ponto material 19
2.1 Velocidade e aceleração curvilíneas 19
2.2 Produto cruzado 21
2.3 Cinemática do movimento rotativo 24
2.4 Movimento de um corpo lançado em ângulo com a horizontal 26
3 Leis do movimento 29
3.1 O conceito de força 29
3.2 Segunda lei de Newton. Peso 30
3.3 Terceira lei de Newton 31
3.4 Quadros de referência inerciais 33
3.5 Quadros de referência não inerciais 34
3.6 Princípio da relatividade de Galileu 35
3.7 Exemplos de várias forças 36
4 Momento e energia 40
4.1 Centro de inércia (centro de massa) de um corpo estendido 40
4.2 Determinando a posição do centro de massa de corpos simples 42
4.3 Momento do corpo 43
4.4 Trabalho mecânico e energia cinética 44
4.5 Forças conservativas 46
4.6 Energia potencial. Gradiente 47
4.7 A lei da conservação da energia mecânica 49
5 Colisão de duas partículas 51
5.1 Energia interna de um sistema mecânico 51
5.2 Classificação de colisões duplas 52
5.3 Impacto central (frontal) absolutamente elástico 53
5.4 Impacto absolutamente inelástico 54
5.5 Colisão no sistema C 55
5.6 Impacto não central absolutamente elástico 55
6 Mecânica dos fluidos 58
6.1 Lei de Pascal 58
6.2 Pressão hidrostática. Força de Arquimedes 59
6.3 Escoamento estacionário de um fluido ideal 60
6.4 Exemplos de uso da equação de Bernoulli 62
6.5 Fricção viscosa 64
6.6 O fluxo de um líquido viscoso através de um tubo 65
6.7 Escoamento turbulento. Reynolds número 66
6.8 Forças de resistência quando os corpos se movem em um fluido viscoso 67
7 Propriedades elásticas de sólidos 69
7.1 Estresse e deformação 69
7.2 Lei de Hooke. Módulo de Young e razão de Poisson 71
7.3 Energia de deformação elástica do meio 72
7.4 Compressão geral 72
7.5 Deformação compressiva de uma barra fixa 73
7.6 Deformação térmica de sólidos 74
7.7 Deformação por cisalhamento 75
8 Dinâmica de um corpo rígido 78
8.1 Momento de inércia de um corpo rígido 78
8.2 Momentos de inércia de alguns corpos simples 79
8.3 Momento de força 81
8.4 Torque angular 82
8.5 Dinâmica rotacional 83
8.6 Rolar um corpo redondo para baixo de um plano inclinado 84
9 Rotação 3D de corpos rígidos 87
9.1 Tensor do momento de inércia de um corpo rígido 87
9.2 Energia e momento angular de um corpo assimétrico 89
9.3 Giroscópio 89
9.4 Forças centrífugas e Coriolis 91
10 Gravidade 94
10.1 Lei da gravidade de Newton 94
10.2 Gravidade perto de corpos estendidos 96
10.3 Forças de maré 98
10.4 Problema Kepler 99
10.5 Parâmetros de órbitas elípticas 101
10.6 Algoritmo para calcular a trajetória de um corpo celeste 103
11 Harmônicos 104
11.1 Pequenas vibrações 104
11.2 Energia de movimento vibratório 106
11.3 Adição de oscilações unidimensionais. Bate 106
11.4 Adição de vibrações mutuamente perpendiculares 107
11.5 Oscilações de pêndulos acoplados 108
12 O princípio da relatividade 112
12.1 A velocidade da luz e o postulado de Einstein 112
12.2 Transformações de Lorentz 114
12.3 Consequências das transformações de Lorentz 116
12.3.1 Relatividade de simultaneidade 116
12.3.2 Relatividade dos comprimentos dos segmentos 117
12.3.3 Relatividade dos intervalos de tempo entre os eventos. . 118
12.4 Adição de velocidade 119
12.5 Aberração leve 120
13 Dinâmica relativística 122
13.1 Momento Relativístico 122
13.2 Energia de partículas relativísticas 123
13.3 Lei de conservação da energia total 124
13.4 Colisão inelástica de duas partículas relativísticas 126
13.5 Espaço-tempo quadridimensional 127
13,6 Produto escalar de 4 vetores 129
13.7 Efeito Doppler Óptico 131
Conclusão 134
Literatura 135
Este manual contém 13 capítulos sobre as principais seções de mecânica, fornecidas pela norma básica de educação física para alunos de especialidades técnicas de universidades.
No nível metodológico original, o manual delineia os fundamentos do método de coordenadas e o aparato conceitual vetorial da mecânica, os fundamentos da cinemática e dinâmica do movimento de translação e rotação de um corpo rígido, as leis de conservação de energia e momento da mecânica sistemas, a mecânica dos fluidos e sólidos elásticos, a teoria clássica da gravidade e movimento dos corpos celestes, propriedades básicas de oscilações harmônicas, fundamentos físicos da teoria da relatividade especial.
O conteúdo dos capítulos é uma apresentação coerente e consistente do material, em que os elementos mais importantes são especialmente destacados: definições de novos termos, afirmações que têm força de teoremas, fatos ou disposições que requerem atenção especial do leitor. Ao final de cada capítulo há uma lista de questões de controle que o leitor deverá ser capaz de responder durante o colóquio ou conversa com o professor.
Todas as grandezas vetoriais em fórmulas e texto são indicadas em negrito, por exemplo, o vetor velocidade v. O produto escalar de vetores é denotado por um ponto entre os vetores fatoriais - Fv, e o produto vetorial por um cruzamento - g xp. Parênteses em fórmulas matemáticas são usados apenas para agrupamento padrão de operações matemáticas e designação de argumentos de função.
Este manual de física é apresentado na linguagem mais concisa, mas bastante informativa. Em geral, este manual parece ser útil não apenas para alunos do primeiro ano, mas também para todos os graduados de universidades técnicas. Os professores de física também encontrarão novas abordagens na apresentação de algumas seções.
Energia e momento são os conceitos mais importantes da física. Acontece que as leis de conservação desempenham um papel importante na natureza em geral. A busca por quantidades conservadas e as leis pelas quais elas podem ser obtidas é objeto de pesquisas em diversos ramos da física. Vamos derivar essas leis da maneira mais simples da segunda lei de Newton.
Lei da conservação da quantidade de movimento.Pulso, ou quantidade de movimentop definido como o produto da massa m ponto de material por velocidade V: p= mV. A segunda lei de Newton, usando a definição de momento, é escrita como
= dp= F, (1.3.1)
aqui Fé a resultante das forças aplicadas ao corpo.
Sistema fechado chamado de sistema em que a soma das forças externas que atuam sobre o corpo é igual a zero:
F= å Feu= 0 . (1.3.2)
Então a mudança no momento do corpo em um sistema fechado de acordo com a segunda lei de Newton (1.3.1), (1.3.2) é
dp= 0 . (1.3.3)
Neste caso, o momento do sistema de partículas permanece constante:
p= å peu= const. (1.3.4)
Esta expressão é lei da conservação da quantidade de movimento, que é formulado da seguinte forma: quando a soma das forças externas que atuam sobre um corpo ou sistema de corpos é igual a zero, a quantidade de movimento do corpo ou sistema de corpos é um valor constante.
Lei da conservação de energia. Na vida cotidiana, pelo conceito de "trabalho" entendemos qualquer trabalho útil de uma pessoa. Na física estuda-se Trabalho mecanico, que ocorre apenas quando o corpo se move sob a ação de uma força. O trabalho mecânico ∆A é definido como o produto escalar da força F aplicado ao corpo, e o deslocamento do corpo Δ r como resultado dessa força:
UMA UMA= (F, Δ r) = F UMA r cosα. (1.3.5)
Na fórmula (1.3.5), o sinal do trabalho é determinado pelo sinal de cos α.
Querendo mover o gabinete, pressionamos com força, mas se ele não se mover ao mesmo tempo, não realizamos trabalho mecânico. Pode-se imaginar o caso em que o corpo se move sem a participação de forças (por inércia),
neste caso, nenhum trabalho mecânico é feito. Se um sistema de corpos pode realizar trabalho, então ele tem energia.
A energia é um dos conceitos mais importantes não só na mecânica, mas também em outras áreas da física: termodinâmica e física molecular, eletricidade, óptica, física atômica, nuclear e de partículas.
Em qualquer sistema pertencente ao mundo físico, a energia é conservada em qualquer processo. Somente a forma em que ele passa pode mudar. Por exemplo, quando uma bala atinge um tijolo, parte da energia cinética (além disso, mais) é convertida em calor. A razão para isso é a presença de uma força de atrito entre a bala e o tijolo, na qual ela se move com grande atrito. Quando o rotor da turbina gira, a energia mecânica é convertida em energia elétrica e, ao mesmo tempo, uma corrente aparece em um circuito fechado. A energia liberada durante a combustão de combustíveis químicos, ou seja, a energia das ligações moleculares é convertida em energia térmica. A natureza da energia química é a energia das ligações intermoleculares e interatômicas, representando essencialmente a energia molecular ou atômica.
A energia é uma quantidade escalar que caracteriza a capacidade de um corpo realizar trabalho:
E2-E1= ∆A. (1.3.6)
Quando o trabalho mecânico é realizado, a energia de um corpo muda de uma forma para outra. A energia de um corpo pode estar na forma de energia cinética ou potencial.
A energia do movimento mecânico
C parentes = .
chamado energia cinética movimento do corpo para frente. Trabalho e energia no sistema SI de unidades são medidos em joules (J).
A energia pode ser determinada não apenas pelo movimento dos corpos, mas também por seu arranjo e forma mútuos. Essa energia é chamada potencial.
A energia potencial é possuída uma em relação à outra por duas cargas conectadas por uma mola ou por um corpo localizado a uma certa altura acima da Terra. Este último exemplo refere-se à energia potencial gravitacional quando um corpo se move de uma altura acima da Terra para outra. É calculado pela fórmula
energia mecânica.
Dependências da quantidade de movimento na velocidade de movimento de dois corpos. Qual corpo tem a maior massa e em quanto? 1) As massas dos corpos são iguais 2) A massa do corpo 1 é 3,5 vezes maior 3) A massa do corpo 2 é 3,5 vezes maior 4) De acordo com os gráficos, as massas dos corpos não podem ser comparadas
Movendo-se com velocidade v, ele colide com uma bola de plasticina de massa 2t em repouso. Após o impacto, as bolas grudam e se movem juntas. Qual é a velocidade de seu movimento? 1) v/3 2) 2v/3 3) v/2 4) Não há dados suficientes para responder
Eles se movem ao longo de uma ferrovia retilínea com velocidades, cuja dependência das projeções em um eixo paralelo aos trilhos no tempo é mostrada na figura. Após 20 segundos, ocorreu um acoplamento automático entre os carros. A que velocidade e em que direção irão os vagões acoplados? 1) 1,4 m/s, em direção ao movimento inicial 1. 2) 0,2 m/s, em direção ao movimento inicial 1. 3) 1,4 m/s, em direção ao movimento inicial 2. 4) 0,2 m/s, na direção do movimento inicial 2.
O valor que mostra qual trabalho pode ser feito pelo corpo Trabalho perfeito é igual à variação de energia do corpo
De acordo com a equação x: = 2 + 30 t - 2 t2, escrito em SI. Peso corporal 5kg. Qual é a energia cinética do corpo 3 segundos após o início do movimento? 1) 810 J 2) 1440 J 3) 3240 J 4) 4410 J
corpo deformado
Isto é feito trabalho 2 J. Que trabalho deve ser feito para esticar a mola mais 4 cm. 1) 16 J 2) 4 J 3) 8 J 4) 2 J
Determine a energia cinética Ek que o corpo possui no topo da trajetória (veja a figura)? 1) EK=mgH 2) EK=m(V0)2/2 + mgh-mgH 3) EK=mgH-mgH 4) EK=m(V0)2/2 + mgH
mesma velocidade inicial. Na primeira vez, o vetor velocidade da bola foi direcionado verticalmente para baixo, na segunda vez - verticalmente para cima, na terceira vez - horizontalmente. Ignore a resistência do ar. O módulo da velocidade da bola ao se aproximar do solo será: 1) maior no primeiro caso 2) maior no segundo caso 3) maior no terceiro caso 4) igual em todos os casos
Foto da montagem para estudar o deslizamento de um carrinho de 40 g ao longo de um plano inclinado em um ângulo de 30º. No momento do início do movimento, o sensor superior liga o cronômetro. Quando o carro passa pelo sensor inferior, o cronômetro para. Estime a quantidade de calor liberada à medida que o carro desliza para baixo no plano inclinado entre os sensores.
Desce do ponto 1 ao ponto 3 (Fig.). Em que ponto da trajetória sua energia cinética tem o maior valor? 1) No ponto 1. 2) No ponto 2. 3) No ponto 3. 4) Em todos os pontos, os valores de energia são os mesmos.
Eles sobem ao longo de sua inclinação oposta até uma altura de 2 m (até o ponto 2 na figura) e param. O peso do trenó é de 5 kg. Sua velocidade no fundo da ravina era de 10 m/s. Como a energia mecânica total do trenó mudou ao passar do ponto 1 para o ponto 2? 1) Não mudou. 2) Aumento de 100 J. 3) Diminuição de 100 J. 4) Diminuição de 150 J. 2
impulso do corpo
A quantidade de movimento de um corpo é uma quantidade igual ao produto da massa do corpo pela sua velocidade.
Cabe lembrar que estamos falando de um corpo que pode ser representado como um ponto material. O momento de um corpo ($p$) também é chamado de momento. O conceito de momento foi introduzido na física por René Descartes (1596-1650). O termo "impulso" apareceu mais tarde (impulsus em latim significa "empurrar"). A quantidade de movimento é uma grandeza vetorial (como a velocidade) e é expressa pela fórmula:
$p↖(→)=mυ↖(→)$
A direção do vetor momento sempre coincide com a direção da velocidade.
A unidade de momento no SI é o momento de um corpo com massa de $ 1$ kg movendo-se a uma velocidade de $ 1$ m/s, portanto, a unidade de momento é $ 1$ kg $·$ m/s.
Se uma força constante atua sobre um corpo (ponto material) durante o intervalo de tempo $∆t$, então a aceleração também será constante:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
onde, $(υ_1)↖(→)$ e $(υ_2)↖(→)$ são as velocidades inicial e final do corpo. Substituindo este valor na expressão da segunda lei de Newton, temos:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Abrindo os colchetes e usando a expressão para o momento do corpo, temos:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Aqui $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ é a mudança de momento ao longo do tempo $∆t$. Então a equação anterior fica:
$∆p↖(→)=F↖(→)∆t$
A expressão $∆p↖(→)=F↖(→)∆t$ é uma representação matemática da segunda lei de Newton.
O produto de uma força e sua duração é chamado impulso de força. então a variação da quantidade de movimento de um ponto é igual à variação da quantidade de movimento da força que atua sobre ele.
A expressão $∆p↖(→)=F↖(→)∆t$ é chamada equação do movimento do corpo. Deve-se notar que a mesma ação - uma mudança no momento de um ponto - pode ser obtida por uma pequena força em um longo período de tempo e por uma grande força em um pequeno período de tempo.
Impulso do sistema tel. Lei da mudança de momento
O impulso (momento) de um sistema mecânico é um vetor igual à soma dos impulsos de todos os pontos materiais deste sistema:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
As leis da mudança e conservação do momento são uma consequência da segunda e terceira leis de Newton.
Considere um sistema formado por dois corpos. As forças ($F_(12)$ e $F_(21)$ na figura, com as quais os corpos do sistema interagem entre si, são chamadas internas.
Deixe, além das forças internas, as forças externas $(F_1)↖(→)$ e $(F_2)↖(→)$ atuarem no sistema. Para cada corpo, a equação $∆p↖(→)=F↖(→)∆t$ pode ser escrita. Somando as partes esquerda e direita dessas equações, obtemos:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
De acordo com a terceira lei de Newton $(F_(12))↖(→)=-(F_(21))↖(→)$.
Conseqüentemente,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
No lado esquerdo está a soma geométrica das variações da quantidade de movimento de todos os corpos do sistema, igual à variação da quantidade de movimento do próprio sistema - $(∆p_(syst))↖(→)$. Com isso em mente , a igualdade $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ pode ser escrita:
$(∆p_(sys))↖(→)=F↖(→)∆t$
onde $F↖(→)$ é a soma de todas as forças externas que atuam sobre o corpo. O resultado obtido significa que apenas forças externas podem alterar a quantidade de movimento do sistema, e a mudança na quantidade de movimento do sistema é direcionada da mesma forma que a força externa total. Esta é a essência da lei da mudança no momento de um sistema mecânico.
As forças internas não podem alterar o momento total do sistema. Eles apenas alteram os impulsos dos corpos individuais do sistema.
Lei da conservação da quantidade de movimento
Da equação $(∆p_(syst))↖(→)=F↖(→)∆t$ segue a lei de conservação do momento. Se nenhuma força externa atua no sistema, então o lado direito da equação $(∆p_(syst))↖(→)=F↖(→)∆t$ se anula, o que significa que o momento total do sistema permanece inalterado :
$(∆p_(sys))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Um sistema no qual nenhuma força externa atua ou a resultante de forças externas é igual a zero é chamado fechado.
A lei da conservação da quantidade de movimento afirma:
O momento total de um sistema fechado de corpos permanece constante para qualquer interação dos corpos do sistema entre si.
O resultado obtido é válido para um sistema contendo um número arbitrário de corpos. Se a soma das forças externas não for igual a zero, mas a soma de suas projeções em alguma direção for igual a zero, a projeção do momento do sistema nessa direção não mudará. Assim, por exemplo, um sistema de corpos na superfície da Terra não pode ser considerado fechado devido à força da gravidade agindo sobre todos os corpos, entretanto, a soma das projeções dos impulsos na direção horizontal pode permanecer inalterada (na ausência de atrito), pois nesta direção a força da gravidade não é válida.
Jato-Propulsão
Considere exemplos que confirmam a validade da lei da conservação do momento.
Vamos pegar um balão de borracha infantil, inflá-lo e soltá-lo. Veremos que quando o ar começar a sair dele em uma direção, o próprio balão voará na outra direção. O movimento da bola é um exemplo de propulsão a jato. É explicado pela lei da conservação do momento: o momento total do sistema "bola mais ar nele" antes da saída de ar é zero; deve permanecer igual a zero durante o movimento; portanto, a bola se move na direção oposta à direção de saída do jato e com tal velocidade que seu momento é igual em valor absoluto ao momento do jato de ar.
jato-Propulsão chamado de movimento de um corpo que ocorre quando uma parte dele se separa dele em alguma velocidade. Devido à lei da conservação do momento, a direção do movimento do corpo é oposta à direção do movimento da parte separada.
Os vôos de foguetes são baseados no princípio da propulsão a jato. Um foguete espacial moderno é uma aeronave muito complexa. A massa do foguete é a soma da massa do fluido de trabalho (ou seja, gases quentes resultantes da combustão do combustível e ejetados na forma de jato) e a massa final, ou, como dizem, “seca” do foguete, permanecendo após a ejeção do fluido de trabalho do foguete.
Quando um jato de gás reativo é ejetado de um foguete em alta velocidade, o próprio foguete corre na direção oposta. De acordo com a lei de conservação do momento, o momento $m_(p)υ_p$ adquirido pelo foguete deve ser igual ao momento $m_(gás) υ_(gás)$ dos gases ejetados:
$m_(p)υ_p=m_(gás) υ_(gás)$
Segue que a velocidade do foguete
$υ_p=((m_(gás))/(m_p)) υ_(gás)$
Pode ser visto a partir desta fórmula que quanto maior a velocidade dos gases ejetados e quanto maior a razão entre a massa do fluido de trabalho (ou seja, a massa de combustível) para a massa final (“seca”) do foguete, o maior a velocidade do foguete.
A fórmula $υ_p=((m_(gás))/(m_p))·υ_(gás)$ é aproximada. Não leva em conta que à medida que o combustível queima, a massa do foguete voador se torna cada vez menor. A fórmula exata para a velocidade de um foguete foi obtida em 1897 por K. E. Tsiolkovsky e leva seu nome.
Forçar trabalho
O termo "trabalho" foi introduzido na física em 1826 pelo cientista francês J. Poncelet. Se na vida cotidiana apenas o trabalho humano é chamado de trabalho, então na física e, em particular, na mecânica, é geralmente aceito que o trabalho é feito pela força. A quantidade física de trabalho geralmente é indicada pela letra $A$.
Forçar trabalho- esta é uma medida da ação de uma força, dependendo de seu módulo e direção, bem como do deslocamento do ponto de aplicação da força. Para uma força constante e movimento retilíneo, o trabalho é determinado pela igualdade:
$A=F|∆r↖(→)|cosα$
onde $F$ é a força que atua sobre o corpo, $∆r↖(→)$ é o deslocamento, $α$ é o ângulo entre a força e o deslocamento.

O trabalho da força é igual ao produto dos módulos de força e deslocamento e o cosseno do ângulo entre eles, ou seja, o produto escalar dos vetores $F↖(→)$ e $∆r↖(→)$.
O trabalho é uma grandeza escalar. Se $α 0$, e se $90°
Quando várias forças atuam sobre um corpo, o trabalho total (a soma do trabalho de todas as forças) é igual ao trabalho da força resultante.
A unidade SI de trabalho é joule($1$J). $1$ J é o trabalho realizado por uma força de $1$ N em uma trajetória de $1$ m na direção dessa força. Esta unidade recebeu o nome do cientista inglês J. Joule (1818-1889): $1$ J = $1$ N $·$ m. Kilojoules e milijoules também são usados com frequência: $1$ kJ $= 1.000$ J, $1$ mJ $ = 0,001$ J.
O trabalho da gravidade
Consideremos um corpo deslizando ao longo de um plano inclinado com ângulo de inclinação $α$ e altura $H$.

Expressamos $∆x$ em termos de $H$ e $α$:
$∆x=(H)/(senα)$
Considerando que a gravidade $F_т=mg$ faz um ângulo ($90° - α$) com a direção do movimento, usando a fórmula $∆x=(H)/(sin)α$, obtemos uma expressão para o trabalho da gravidade $A_g$:
$A_g=mg cos(90°-α)(H)/(sinα)=mgH$
A partir desta fórmula pode-se ver que o trabalho da gravidade depende da altura e não depende do ângulo de inclinação do plano.
Disso decorre que:
- o trabalho da gravidade não depende da forma da trajetória ao longo da qual o corpo se move, mas apenas da posição inicial e final do corpo;
- quando um corpo se move ao longo de uma trajetória fechada, o trabalho da gravidade é zero, ou seja, a gravidade é uma força conservativa (forças que possuem essa propriedade são chamadas de conservativas).
O trabalho das forças de reação, é zero porque a força de reação ($N$) é direcionada perpendicularmente ao deslocamento $∆x$.
O trabalho da força de atrito
A força de atrito é direcionada oposta ao deslocamento $∆x$ e faz um ângulo $180°$ com ele, então o trabalho da força de atrito é negativo:
$A_(tr)=F_(tr)∆x cos180°=-F_(tr) ∆x$
Como $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ então
$A_(tr)=μmgHctgα$
O trabalho da força elástica
Faça uma força externa $F↖(→)$ agir sobre uma mola não esticada de comprimento $l_0$, esticando-a em $∆l_0=x_0$. Na posição $x=x_0F_(controle)=kx_0$. Após o término da força $F↖(→)$ no ponto $x_0$, a mola é comprimida sob a ação da força $F_(controle)$.

Vamos determinar o trabalho da força elástica quando a coordenada da extremidade direita da mola muda de $х_0$ para $х$. Como a força elástica nessa área varia linearmente, pela lei de Hooke, seu valor médio nessa área pode ser usado:
$F_(ex.av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Então o trabalho (levando em conta o fato de que as direções $(F_(exp.av.))↖(→)$ e $(∆x)↖(→)$ coincidem) é igual a:
$A_(exerc)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Pode-se mostrar que a forma da última fórmula não depende do ângulo entre $(F_(exp.av.))↖(→)$ e $(∆x)↖(→)$. O trabalho das forças elásticas depende apenas das deformações da mola nos estados inicial e final.
Assim, a força elástica, como a gravidade, é uma força conservativa.
Poder da força
A potência é uma quantidade física medida pela razão entre o trabalho e o período de tempo durante o qual é produzido.
Em outras palavras, a potência mostra quanto trabalho é feito por unidade de tempo (no SI, para $ 1$ s).
A potência é determinada pela fórmula:
onde $N$ é a potência, $A$ é o trabalho realizado no tempo $∆t$.
Substituindo $A=F|(∆r)↖(→)|cosα$ na fórmula $N=(A)/(∆t)$ em vez do trabalho $A$, temos:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
A potência é igual ao produto dos módulos dos vetores força e velocidade e o cosseno do ângulo entre esses vetores.
A potência no sistema SI é medida em watts (W). Um watt ($1$ W) é a potência na qual $1$ J de trabalho é realizado em $1$ s: $1$ W $= 1$ J/s.
Esta unidade recebeu o nome do inventor inglês J. Watt (Watt), que construiu a primeira máquina a vapor. O próprio J. Watt (1736-1819) usou uma unidade diferente de potência - cavalos (hp), que ele introduziu para poder comparar o desempenho de uma máquina a vapor e um cavalo: $ 1 $ hp. $= 735,5$ Ter.
Na tecnologia, unidades maiores de energia são frequentemente usadas - quilowatts e megawatts: $ 1 $ kW $ = 1000 $ W, $ 1 $ MW $ = 1000000 $ W.
Energia cinética. Lei da variação da energia cinética
Se um corpo ou vários corpos em interação (um sistema de corpos) podem realizar trabalho, então eles dizem que têm energia.
A palavra "energia" (do grego. energia - ação, atividade) é muito utilizada na vida cotidiana. Assim, por exemplo, as pessoas que podem trabalhar rapidamente são chamadas de energéticas, com grande energia.
A energia possuída por um corpo devido ao movimento é chamada de energia cinética.
Como no caso da definição de energia em geral, podemos dizer sobre energia cinética que energia cinética é a capacidade de um corpo em movimento realizar trabalho.
Vamos encontrar a energia cinética de um corpo de massa $m$ movendo-se com uma velocidade de $υ$. Como a energia cinética é a energia devida ao movimento, o estado zero para ela é o estado em que o corpo está em repouso. Tendo encontrado o trabalho necessário para comunicar uma determinada velocidade ao corpo, encontraremos sua energia cinética.
Para isso, calculamos o trabalho realizado na seção de deslocamento $∆r↖(→)$ quando as direções dos vetores de força $F↖(→)$ e o deslocamento $∆r↖(→)$ coincidem. Neste caso, o trabalho é
onde $∆x=∆r$

Para o movimento de um ponto com aceleração $α=const$, a expressão do movimento tem a forma:
$∆x=υ_1t+(at^2)/(2),$
onde $υ_1$ é a velocidade inicial.
Substituindo a expressão para $∆x$ de $∆x=υ_1t+(at^2)/(2)$ na equação $A=F ∆x$ e usando a segunda lei de Newton $F=ma$, temos:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Expressando a aceleração em termos das velocidades inicial $υ_1$ e final $υ_2$ $a=(υ_2-υ_1)/(t)$ e substituindo em $A=ma(υ_1t+(at^2)/(2))=( mat)/ (2)(2υ_1+at)$ temos:
$A=(m(υ_2-υ_1))/(2) (2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Agora igualando a velocidade inicial a zero: $υ_1=0$, obtemos uma expressão para energia cinética:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Assim, um corpo em movimento tem energia cinética. Essa energia é igual ao trabalho que deve ser feito para aumentar a velocidade do corpo de zero para $υ$.
De $E_K=(mυ)/(2)=(p^2)/(2m)$ segue que o trabalho de uma força para mover um corpo de uma posição para outra é igual à variação da energia cinética:
$A=E_(K_2)-E_(K_1)=∆E_K$
A igualdade $A=E_(K_2)-E_(K_1)=∆E_K$ expressa teorema da variação da energia cinética.
Variação da energia cinética do corpo(ponto material) por um certo período de tempo é igual ao trabalho realizado durante esse tempo pela força que atua sobre o corpo.
Energia potencial
A energia potencial é a energia determinada pelo arranjo mútuo de corpos em interação ou partes do mesmo corpo.
Como a energia é definida como a capacidade de um corpo realizar trabalho, a energia potencial é naturalmente definida como o trabalho de uma força que depende apenas da posição relativa dos corpos. Este é o trabalho da gravidade $A=mgh_1-mgh_2=mgH$ e o trabalho da elasticidade:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
A energia potencial do corpo interagindo com a Terra chama-se valor igual ao produto da massa $m$ deste corpo pela aceleração de queda livre $g$ e a altura $h$ do corpo acima da superfície da Terra:
A energia potencial de um corpo deformado elasticamente é o valor igual a metade do produto do coeficiente de elasticidade (rigidez) $k$ do corpo e o quadrado da deformação $∆l$:
$E_p=(1)/(2)k∆l^2$
O trabalho das forças conservativas (gravidade e elasticidade), levando em conta $E_p=mgh$ e $E_p=(1)/(2)k∆l^2$, é expresso da seguinte forma:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Esta fórmula nos permite dar uma definição geral de energia potencial.
A energia potencial do sistema é uma quantidade que depende da posição dos corpos, cuja mudança durante a transição do sistema do estado inicial para o estado final é igual ao trabalho das forças conservativas internas do sistema, tomada com o sinal oposto.
O sinal de menos no lado direito da equação $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ significa que quando o trabalho é feito por forças internas ( por exemplo, queda do corpo ao solo sob a ação da gravidade no sistema "pedra-Terra"), a energia do sistema diminui. Trabalho e variação de energia potencial em um sistema sempre têm sinais opostos.
Como o trabalho determina apenas a variação da energia potencial, somente a variação da energia tem significado físico na mecânica. Portanto, a escolha do nível de energia zero é arbitrária e é determinada apenas por considerações de conveniência, por exemplo, a facilidade de escrever as equações correspondentes.
A lei da mudança e conservação da energia mecânica
Energia mecânica total do sistema a soma de suas energias cinética e potencial é chamada:
É determinado pela posição dos corpos (energia potencial) e sua velocidade (energia cinética).
De acordo com o teorema da energia cinética,
$E_k-E_(k_1)=A_p+A_(pr),$
onde $А_р$ é o trabalho de forças potenciais, $А_(pr)$ é o trabalho de forças não potenciais.
Por sua vez, o trabalho das forças potenciais é igual à diferença da energia potencial do corpo nos estados inicial $E_(p_1)$ e final $E_p$. Com isso em mente, obtemos uma expressão para a lei da variação da energia mecânica:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
onde o lado esquerdo da igualdade é a variação da energia mecânica total e o lado direito é o trabalho das forças não potenciais.
Então, lei da variação da energia mecânica lê:
A variação da energia mecânica do sistema é igual ao trabalho de todas as forças não potenciais.
Um sistema mecânico no qual apenas forças potenciais atuam é chamado conservativo.
Em um sistema conservativo $A_(pr) = 0$. isso implica lei da conservação da energia mecânica:
Em um sistema conservativo fechado, a energia mecânica total é conservada (não varia com o tempo):
$E_k+E_p=E_(k_1)+E_(p_1)$
A lei de conservação da energia mecânica é derivada das leis da mecânica newtoniana, que são aplicáveis a um sistema de pontos materiais (ou macropartículas).
No entanto, a lei da conservação da energia mecânica também é válida para um sistema de micropartículas, onde as próprias leis de Newton não se aplicam mais.
A lei da conservação da energia mecânica é uma consequência da homogeneidade do tempo.
Uniformidade de tempoé que, nas mesmas condições iniciais, o curso dos processos físicos não depende do momento em que essas condições são criadas.
A lei da conservação da energia mecânica total significa que quando a energia cinética em um sistema conservativo muda, sua energia potencial também deve mudar, de modo que sua soma permaneça constante. Isso significa a possibilidade de converter um tipo de energia em outro.
De acordo com as diferentes formas de movimento da matéria, são considerados diferentes tipos de energia: mecânica, interna (igual à soma da energia cinética do movimento caótico das moléculas em relação ao centro de massa do corpo e a energia potencial do corpo). interação de moléculas entre si), eletromagnética, química (que consiste na energia cinética do movimento dos elétrons e elétrica a energia de sua interação entre si e com os núcleos atômicos), energia nuclear, etc. é claro que a divisão da energia em diferentes tipos é bastante arbitrária.
Os fenômenos naturais geralmente são acompanhados pela transformação de um tipo de energia em outro. Assim, por exemplo, o atrito de peças de vários mecanismos leva à conversão de energia mecânica em calor, ou seja, em energia interna. Nas máquinas térmicas, ao contrário, a energia interna é convertida em energia mecânica; nas células galvânicas, a energia química é convertida em energia elétrica, etc.
Atualmente, o conceito de energia é um dos conceitos básicos da física. Este conceito está intrinsecamente ligado à ideia da transformação de uma forma de movimento em outra.
Aqui está como o conceito de energia é formulado na física moderna:
A energia é uma medida quantitativa geral do movimento e interação de todos os tipos de matéria. A energia não surge do nada e não desaparece, só pode passar de uma forma para outra. O conceito de energia une todos os fenômenos da natureza.
mecanismos simples. eficiência do mecanismo
Mecanismos simples são dispositivos que alteram a magnitude ou direção das forças aplicadas ao corpo.
Eles são usados para mover ou levantar grandes cargas com pouco esforço. Estes incluem a alavanca e suas variedades - blocos (móveis e fixos), um portão, um plano inclinado e suas variedades - uma cunha, um parafuso etc.
Braço de alavanca. Regra de alavanca
A alavanca é um corpo rígido capaz de girar em torno de um suporte fixo.

A regra de alavancagem diz:
Uma alavanca está em equilíbrio se as forças aplicadas a ela são inversamente proporcionais aos seus braços:
$(F_2)/(F_1)=(l_1)/(l_2)$
Da fórmula $(F_2)/(F_1)=(l_1)/(l_2)$, aplicando a propriedade de proporção a ela (o produto dos termos extremos da proporção é igual ao produto de seus termos médios), temos pode obter a seguinte fórmula:
Mas $F_1l_1=M_1$ é o momento da força que tende a girar a alavanca no sentido horário, e $F_2l_2=M_2$ é o momento da força que tende a girar a alavanca no sentido anti-horário. Assim, $M_1=M_2$, que deveria ser provado.
A alavanca começou a ser usada por pessoas nos tempos antigos. Com sua ajuda, foi possível levantar pesadas lajes de pedra durante a construção das pirâmides no antigo Egito. Sem alavancagem, isso não teria sido possível. Afinal, por exemplo, para a construção da pirâmide de Quéops, que tem uma altura de $ 147$ m, foram usados mais de dois milhões de blocos de pedra, sendo que o menor deles tinha uma massa de $ 2,5$ toneladas!
Hoje em dia, as alavancas são amplamente utilizadas tanto na produção (por exemplo, guindastes) quanto na vida cotidiana (tesouras, alicates, balanças).
Bloco fixo
A ação de um bloco fixo é semelhante à ação de uma alavanca com igual alavancagem: $l_1=l_2=r$. A força aplicada $F_1$ é igual à carga $F_2$, e a condição de equilíbrio é:
Bloco fixo usado quando você precisa alterar a direção de uma força sem alterar sua magnitude.
Bloco móvel
O bloco móvel atua de forma semelhante a uma alavanca, cujos braços são: $l_2=(l_1)/(2)=r$. Neste caso, a condição de equilíbrio tem a forma:
onde $F_1$ é a força aplicada, $F_2$ é a carga. O uso de um bloco móvel dá um ganho de força duas vezes.
Polyspast (sistema de bloco)
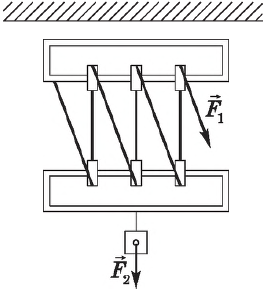
Uma talha de corrente comum consiste em blocos $n$ móveis e $n$ fixos. Aplicá-lo dá um ganho de força de $ 2n$ vezes:
$F_1=(F_2)/(2n)$
Talha de corrente elétrica consiste em n bloco móvel e um fixo. O uso de uma talha de corrente elétrica proporciona um ganho de força de $2^n$ vezes:
$F_1=(F_2)/(2^n)$

Parafuso
O parafuso é um plano inclinado enrolado no eixo.

A condição para o equilíbrio de forças atuando no parafuso tem a forma:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

onde $F_1$ é uma força externa aplicada ao parafuso e atuando a uma distância $R$ do seu eixo; $F_2$ é a força que atua na direção do eixo do parafuso; $h$ - passo do parafuso; $r$ é o raio médio da rosca; $α$ é o ângulo da rosca. $R$ é o comprimento da alavanca (chave) que gira o parafuso com a força $F_1$.
Eficiência
Coeficiente de desempenho (COP) - a proporção de trabalho útil para todo o trabalho despendido.
A eficiência é frequentemente expressa como uma porcentagem e denotada pela letra grega $η$ ("isto"):
$η=(A_p)/(A_3) 100%$
onde $A_n$ é o trabalho útil, $A_3$ é todo o trabalho gasto.
O trabalho útil é sempre apenas uma parte do trabalho total que uma pessoa gasta usando este ou aquele mecanismo.
Parte do trabalho realizado é gasto na superação das forças de atrito. Desde $А_3 > А_п$, a eficiência é sempre menor que $1$ (ou $< 100%$).
Como cada um dos trabalhos nesta equação pode ser expresso como o produto da força correspondente pela distância percorrida, ela pode ser reescrita da seguinte forma: $F_1s_1≈F_2s_2$.
Disto segue-se que, ganhando com a ajuda do mecanismo em vigor, perdemos o mesmo número de vezes no caminho e vice-versa. Essa lei é chamada de regra de ouro da mecânica.
A regra de ouro da mecânica é uma lei aproximada, pois não leva em consideração o trabalho para vencer o atrito e a gravidade das partes dos dispositivos utilizados. No entanto, pode ser muito útil ao analisar o funcionamento de qualquer mecanismo simples.

Assim, por exemplo, graças a esta regra, podemos dizer imediatamente que o trabalhador mostrado na figura, com um ganho duplo na força de elevação de $ 10$ cm, terá que abaixar a extremidade oposta da alavanca em $ 20$ cm.
Colisão de corpos. Impactos elásticos e inelásticos
As leis de conservação do momento e da energia mecânica são usadas para resolver o problema do movimento dos corpos após uma colisão: os momentos e energias conhecidos antes da colisão são usados para determinar os valores dessas quantidades após a colisão. Considere os casos de impactos elásticos e inelásticos.
Um impacto absolutamente inelástico é chamado, após o qual os corpos formam um único corpo movendo-se a uma certa velocidade. O problema da velocidade deste último é resolvido usando a lei de conservação da quantidade de movimento para um sistema de corpos com massas $m_1$ e $m_2$ (se estamos falando de dois corpos) antes e depois do impacto:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Obviamente, a energia cinética dos corpos não é conservada durante um impacto inelástico (por exemplo, em $(υ_1)↖(→)=-(υ_2)↖(→)$ e $m_1=m_2$ torna-se igual a zero após o impacto).
Um impacto absolutamente elástico é chamado, no qual não apenas a soma dos impulsos é preservada, mas também a soma das energias cinéticas dos corpos em colisão.
Para um impacto absolutamente elástico, as equações
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2 )^2)/(2)$
onde $m_1, m_2$ são as massas das bolas, $υ_1, υ_2$ são as velocidades das bolas antes do impacto, $υ"_1, υ"_2$ são as velocidades das bolas após o impacto.
