Bevor wir uns dem Konzept eines Vektorprodukts zuwenden, wenden wir uns der Frage nach der Orientierung des geordneten Vektortripels a → , b → , c → im dreidimensionalen Raum zu.
Lassen Sie uns zunächst die Vektoren a → , b → , c → von einem Punkt beiseite legen. Die Orientierung des Tripels a → , b → , c → ist rechts oder links, je nach Richtung des Vektors c → . Aus der Richtung, in der die kürzeste Abbiegung vom Vektor a → nach b → vom Ende des Vektors c → erfolgt, wird die Form des Tripels a → , b → , c → bestimmt.
Wenn die kürzeste Drehung gegen den Uhrzeigersinn ist, wird das Tripel der Vektoren a → , b → , c → aufgerufen Rechts wenn im Uhrzeigersinn - links.
Als nächstes nehmen Sie zwei nicht kollineare Vektoren a → und b → . Verschieben wir dann die Vektoren A B → = a → und A C → = b → vom Punkt A. Konstruieren wir einen Vektor A D → = c → , der gleichzeitig senkrecht auf A B → und A C → steht. Wenn wir also den Vektor A D → = c → konstruieren, können wir zwei Dinge tun, indem wir ihm entweder eine Richtung oder die entgegengesetzte geben (siehe Abbildung).

Das geordnete Trio der Vektoren a → , b → , c → kann, wie wir herausgefunden haben, je nach Richtung des Vektors rechts oder links sein.
Aus dem Obigen können wir die Definition eines Vektorprodukts einführen. Diese Definition gegeben für zwei in definierte Vektoren rechteckiges System Koordinaten dreidimensionaler Raum.
Bestimmung 1
Das Vektorprodukt zweier Vektoren a → und b → Wir nennen einen solchen Vektor, der in einem rechteckigen Koordinatensystem des dreidimensionalen Raums gegeben ist, so dass:
- wenn die Vektoren a → und b → kollinear sind, ist es Null;
- es wird sowohl zum Vektor a → als auch zum Vektor b → senkrecht sein, d.h. ∠ a → c → = ∠ b → c → = π 2 ;
- seine Länge wird durch die Formel bestimmt: c → = a → b → sin ∠ a → , b → ;
- das Tripel der Vektoren a → , b → , c → hat die gleiche Orientierung wie das gegebene Koordinatensystem.
Vektorprodukt Vektoren a → und b → hat die folgende Notation: a → × b → .
Produktübergreifende Koordinaten
Da jeder Vektor bestimmte Koordinaten im Koordinatensystem hat, ist es möglich, eine zweite Definition des Kreuzprodukts einzuführen, die es Ihnen ermöglicht, seine Koordinaten aus den gegebenen Koordinaten der Vektoren zu finden.
Bestimmung 2
In einem rechtwinkligen Koordinatensystem des dreidimensionalen Raums Vektorprodukt zweier Vektoren a → = (a x ; a y ; a z) und b → = (b x ; b y ; b z) nenne den Vektor c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → , wobei i → , j → , k → Koordinatenvektoren sind.
Das Vektorprodukt kann als Determinante dargestellt werden quadratische Matrix dritter Ordnung, wobei die erste Zeile die Vektoren i → , j → , k → enthält, die zweite Zeile die Koordinaten des Vektors a → enthält und die dritte Zeile die Koordinaten des Vektors b → in einer gegebenen rechtwinkligen Koordinate enthält System sieht diese Matrixdeterminante so aus: c → = a → × b → = i → j → k → a x a y a z b x b y b z
Wenn wir diese Determinante über die Elemente der ersten Zeile erweitern, erhalten wir die Gleichheit: c → = a → × b → = i → j → k → a x a y a z b x b y b z = a y a z b y b z i → - a x a z b x b z j → + a x a y b x b y k → = = a → × b → = ( a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →
Produktübergreifende Eigenschaften
Es ist bekannt, dass das Vektorprodukt in Koordinaten als Determinante der Matrix dargestellt wird c → = a → × b → = i → j → k → a x a y a z b x b y b z , dann auf der Basis matrixbestimmende Eigenschaften folgende Vektorprodukteigenschaften:
- Antikommutativität a → × b → = - b → × a → ;
- Distributivität a (1) → + a (2) → × b = a (1) → × b → + a (2) → × b → oder a → × b (1) → + b (2) → = a → × b (1) → + a → × b (2) → ;
- Assoziativität λ a → × b → = λ a → × b → oder a → × (λ b →) = λ a → × b → , wobei λ eine beliebige reelle Zahl ist.
Diese Eigenschaften haben keine komplizierten Beweise.
Beispielsweise können wir die Antikommutativitätseigenschaft eines Vektorprodukts beweisen.
Beweis der Antikommutativität
Per Definition ist a → × b → = i → j → k → a x a y a z b x b y b z und b → × a → = i → j → k → b x b y b z a x a y a z . Und wenn zwei Zeilen der Matrix vertauscht sind, sollte sich der Wert der Determinante der Matrix ins Gegenteil ändern, also a → × b → = i → j → k → a x a y a z b x b y b z = - i → j → k → b x b y b z a x a y a z = - b → × a → , was die Antikommutativität des Vektorprodukts beweist.
Vektorprodukt - Beispiele und Lösungen
In den meisten Fällen gibt es drei Arten von Aufgaben.
Bei Problemen des ersten Typs sind normalerweise die Längen zweier Vektoren und der Winkel zwischen ihnen angegeben, aber Sie müssen die Länge des Kreuzprodukts finden. Verwenden Sie in diesem Fall die folgende Formel c → = a → b → sin ∠ a → , b → .
Beispiel 1
Finden Sie die Länge des Kreuzprodukts der Vektoren a → und b → wenn a → = 3 , b → = 5 , ∠ a → , b → = π 4 bekannt ist.
Entscheidung
Unter Verwendung der Definition der Länge des Vektorprodukts der Vektoren a → und b → lösen wir diese Aufgabe: a → × b → = a → b → Sünde ∠ a → , b → = 3 5 Sünde π 4 = 15 2 2 .
Antworten: 15 2 2 .
Aufgaben des zweiten Typs haben einen Zusammenhang mit den Koordinaten von Vektoren, sie enthalten ein Vektorprodukt, seine Länge usw. durchsucht bekannte Koordinaten gegebene Vektoren a → = (a x ; a y ; a z) und b → = (b x ; b y ; b z) .
Für diese Art von Aufgabe können Sie viele Optionen für Aufgaben lösen. Zum Beispiel nicht die Koordinaten der Vektoren a → und b → , sondern ihre Erweiterungen in Bezug auf Koordinatenvektoren nett b → = b x ich → + b y j → + b z k → und c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → , oder die Vektoren a → und b → können durch die Koordinaten ihrer gegeben werden Start- und Endpunkte.
Betrachten Sie die folgenden Beispiele.
Beispiel 2
Zwei Vektoren werden in einem rechtwinkligen Koordinatensystem a → = (2 ; 1 ; - 3) , b → = (0 ; - 1 ; 1) gesetzt. Finden Sie ihr Vektorprodukt.
Entscheidung
Durch die zweite Definition finden wir das Vektorprodukt zweier Vektoren in angegebenen Koordinaten: a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → = = (1 1 - (- 3) (- 1)) i → + (( - 3) 0 - 2 1) j → + (2 (- 1) - 1 0) k → = = - 2 ich → - 2 j → - 2 k → .
Wenn wir das Kreuzprodukt in Bezug auf die Matrixdeterminante schreiben, dann die Lösung dieses Beispiel sieht so aus: a → × b → = i → j → k → a x a y a z b x b y b z = i → j → k → 2 1 - 3 0 - 1 1 = - 2 i → - 2 j → - 2 k → .
Antworten: a → × b → = - 2 ich → - 2 j → - 2 k → .
Beispiel 3
Finden Sie die Länge des Kreuzprodukts der Vektoren i → - j → und i → + j → + k → , wobei i → , j → , k → - Orte eines rechtwinkligen kartesischen Koordinatensystems.
Entscheidung
Lassen Sie uns zuerst die Koordinaten des gegebenen Vektorprodukts i → - j → × i → + j → + k → im gegebenen rechtwinkligen Koordinatensystem finden.
Es ist bekannt, dass die Vektoren i → – j → und i → + j → + k → die Koordinaten (1 ; – 1 ; 0) bzw. (1 ; 1 ; 1) haben. Finden Sie die Länge des Vektorprodukts mit der Matrixdeterminante, dann haben wir i → - j → × i → + j → + k → = i → j → k → 1 - 1 0 1 1 1 = - i → - j → + 2k → .
Daher hat das Vektorprodukt i → - j → × i → + j → + k → Koordinaten (- 1 ; - 1 ; 2) im gegebenen Koordinatensystem.
Wir finden die Länge des Vektorprodukts durch die Formel (siehe Abschnitt zum Ermitteln der Länge des Vektors): i → - j → × i → + j → + k → = - 1 2 + - 1 2 + 2 2 = 6 .
Antworten: ich → - j → × ich → + j → + k → = 6 . .
Beispiel 4
In einem Rechteck Kartesisches System Koordinaten sind die Koordinaten von drei Punkten A (1 , 0 , 1) , B (0 , 2 , 3) , C (1 , 4 , 2) . Finden Sie gleichzeitig einen Vektor, der senkrecht zu A B → und A C → steht.
Entscheidung
Die Vektoren A B → und A C → haben die folgenden Koordinaten (- 1 ; 2 ; 2) bzw. (0 ; 4 ; 1). Nachdem wir das Vektorprodukt der Vektoren A B → und A C → gefunden haben, ist es offensichtlich, dass es per Definition ein senkrechter Vektor sowohl zu A B → als auch zu A C → ist, das heißt, es ist die Lösung unseres Problems. Finde es A B → × A C → = i → j → k → - 1 2 2 0 4 1 = - 6 i → + j → - 4 k → .
Antworten: - 6 ich → + j → - 4 k → . ist einer der senkrechten Vektoren.
Probleme des dritten Typs konzentrieren sich auf die Verwendung der Eigenschaften des Vektorprodukts von Vektoren. Nach deren Anwendung erhalten wir eine Lösung für das gegebene Problem.
Beispiel 5
Die Vektoren a → und b → sind senkrecht und haben die Längen 3 bzw. 4. Finden Sie die Länge des Kreuzprodukts 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b → .
Entscheidung
Durch die Verteilungseigenschaft des Vektorprodukts können wir schreiben 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b →
Durch die Eigenschaft der Assoziativität nehmen wir im letzten Ausdruck die numerischen Koeffizienten jenseits des Vorzeichens von Vektorprodukten heraus: 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b → = = 3 a → × a → + 3 (- 2) a → × b → + (- 1) b → × a → + (- 1) (- 2) b → × b → = = 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b →
Die Vektorprodukte a → × a → und b → × b → sind gleich 0, da a → × a → = a → a → sin 0 = 0 und b → × b → = b → b → sin 0 = 0 , dann 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b → = - 6 a → × b → - b → × a → . .
Aus der Antikommutativität des Vektorprodukts folgt - 6 a → × b → - b → × a → = - 6 a → × b → - (- 1) a → × b → = - 5 a → × b → . .
Unter Verwendung der Eigenschaften des Vektorprodukts erhalten wir die Gleichheit 3 · a → - b → × a → - 2 · b → = = - 5 · a → × b → .
Bedingt sind die Vektoren a → und b → senkrecht zueinander, das heißt, der Winkel zwischen ihnen ist gleich π 2 . Jetzt müssen nur noch die gefundenen Werte in die entsprechenden Formeln eingesetzt werden: 3 a → - b → × a → - 2 b → = - 5 a → × b → = = 5 a → × b → = 5 a → b → sin (a →, b →) = 5 3 4 sin π 2 = 60.
Antworten: 3 a → - b → × a → - 2 b → = 60 .
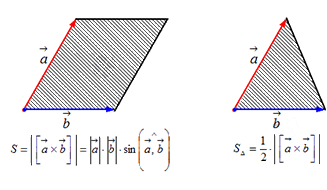
Die Länge des Kreuzprodukts von Vektoren ist per Definition a → × b → = a → · b → · sin ∠ a → , b → . Da es bereits bekannt ist (ab Schulkurs) dass die Fläche eines Dreiecks das halbe Produkt der Längen seiner beiden Seiten multipliziert mit dem Sinus des Winkels zwischen den gegebenen Seiten ist. Daher ist die Länge des Vektorprodukts gleich der Fläche eines Parallelogramms - eines doppelten Dreiecks, nämlich des Produkts der Seiten in Form der Vektoren a → und b → , die von einem Punkt durch den Sinus abgesetzt werden des Winkels zwischen ihnen sin ∠ a → , b → .
Das ist es geometrische bedeutung Vektorprodukt.
Die physikalische Bedeutung des Vektorprodukts
In der Mechanik, einem Teilgebiet der Physik, kann man dank des Vektorprodukts das Kraftmoment relativ zu einem Punkt im Raum bestimmen.
Bestimmung 3
Unter dem Moment der Kraft F → , angewendet auf Punkt B, relativ zu Punkt A, verstehen wir das folgende Vektorprodukt A B → × F → .
Wenn Sie einen Fehler im Text bemerken, markieren Sie ihn bitte und drücken Sie Strg+Enter
7.1. Definition von Kreuzprodukt
Drei nicht koplanare Vektoren a , b und c , in der angegebenen Reihenfolge genommen, bilden ein rechtes Tripel, wenn vom Ende des dritten Vektors c aus gesehen wird, dass die kürzeste Drehung vom ersten Vektor a zum zweiten Vektor b gegen den Uhrzeigersinn verläuft, und eine linke im Uhrzeigersinn (siehe Abb. 16).
Das Vektorprodukt eines Vektors a und eines Vektors b heißt Vektor c, der:
1. Senkrecht zu den Vektoren a und b, also c ^ a und c ^ b;
2. Es hat eine Länge, die numerisch gleich der Fläche des Parallelogramms ist, das auf den Vektoren a und aufgebaut istb wie an den Seiten (siehe Abb. 17), d.h.
3. Die Vektoren a , b und c bilden ein rechtes Tripel.


Das Vektorprodukt wird mit a x b oder [a,b] bezeichnet. Aus der Definition eines Vektorprodukts folgen die folgenden Beziehungen zwischen den Orten i direkt, j und k(siehe Abb. 18):
ich x j \u003d k, j x k \u003d ich, k x ich \u003d j.
Lassen Sie uns zum Beispiel das beweisen ich xj \u003d k.
1) k ^ ich , k ^ j;
2) |k |=1, aber | ich x j| = |i | |J| sin(90°)=1;
3) Vektoren i , j und k ein rechtes Tripel bilden (siehe Abb. 16).
7.2. Produktübergreifende Eigenschaften
1. Wenn die Faktoren umgestellt werden, ändert das Vektorprodukt das Vorzeichen, d. h. und xb \u003d (b xa) (siehe Abb. 19).
Die Vektoren a xb und b xa sind kollinear, haben die gleichen Module (die Fläche des Parallelogramms bleibt unverändert), sind aber entgegengesetzt gerichtet (Tripel a, b und xb und a, b, b x a mit entgegengesetzter Orientierung). Das ist axb = -(bxa).
2. Das Vektorprodukt hat assoziative Eigenschaft in Bezug auf einen Skalarfaktor, d.h. l (a xb) \u003d (l a) x b \u003d a x (l b).

Sei l > 0. Der Vektor l (a xb) steht senkrecht auf den Vektoren a und b. Vektor ( l a) x b steht auch senkrecht auf den Vektoren a und b(Vektoren a, l aber in der gleichen Ebene liegen). Also die Vektoren l(a xb) und ( l a) x b kollinear. Es ist offensichtlich, dass ihre Richtungen übereinstimmen. Sie haben die gleiche Länge:
So l(ein xb)= l ein xb. Es wird ähnlich bewiesen für l<0.
3. Zwei Nicht-Null-Vektoren a und b sind genau dann kollinear, wenn ihr Vektorprodukt gleich dem Nullvektor ist, d.h. und ||b<=>und xb \u003d 0.

Insbesondere gilt i *i =j *j =k *k =0 .
4. Das Vektorprodukt hat eine Verteilungseigenschaft:
(a+b) xs = ein xs + b xs .
Akzeptiere ohne Beweis.
7.3. Kreuzproduktausdruck in Bezug auf Koordinaten
Wir verwenden die Vektorkreuzprodukttabelle i , j und k:

Wenn die Richtung des kürzesten Weges vom ersten zum zweiten Vektor mit der Pfeilrichtung übereinstimmt, ist das Produkt gleich dem dritten Vektor, wenn es nicht übereinstimmt, wird der dritte Vektor mit einem Minuszeichen genommen.
Seien zwei Vektoren a = a x i + a y j+z k und b=bx ich+durch j+bz k. Lassen Sie uns das Vektorprodukt dieser Vektoren finden, indem wir sie als Polynome multiplizieren (gemäß den Eigenschaften des Vektorprodukts):

![]()
Die resultierende Formel kann noch kürzer geschrieben werden:

da die rechte Seite von Gleichheit (7.1) der Erweiterung der Determinante dritter Ordnung in Bezug auf die Elemente der ersten Reihe entspricht, ist Gleichheit (7.2) leicht zu merken.
7.4. Einige Anwendungen des Kreuzprodukts
Kollinearität von Vektoren feststellen

Finden der Fläche eines Parallelogramms und eines Dreiecks
Gemäß der Definition des Kreuzprodukts von Vektoren a und B |a xb | =| ein | * |b |sing , d. h. Spar = |a x b |. Und daher D S \u003d 1/2 | a x b |.
Bestimmung des Kraftmoments um einen Punkt
An Punkt A soll eine Kraft aufgebracht werden F = AB Loslassen Ö- Irgendein Punkt im Raum (siehe Abb. 20).

Das ist aus der Physik bekannt Drehmoment F relativ zum Punkt Ö Vektor genannt M , die durch den Punkt geht Ö und:
1) senkrecht zur Ebene, die durch die Punkte geht O, A, B;
2) numerisch gleich dem Produkt aus Kraft und Schulter
3) bildet mit den Vektoren OA und A B ein rechtes Tripel.
Daher M \u003d OA x F.
Bestimmung der linearen Rotationsgeschwindigkeit
Geschwindigkeit v Punkte M Festkörper, rotiert mit Winkelgeschwindigkeit w um eine feste Achse wird durch die Euler-Formel v \u003d w x r bestimmt, wobei r \u003d OM, wobei O ein fester Punkt der Achse ist (siehe Abb. 21).

Einheitsvektor- Das Vektor, dessen Absolutwert (Modul) gleich eins ist. Um einen Einheitsvektor zu bezeichnen, verwenden wir den Index e. Also, wenn ein Vektor gegeben ist a, dann ist sein Einheitsvektor der Vektor a e) Dieser Einheitsvektor zeigt in dieselbe Richtung wie der Vektor selbst a, und sein Modul ist gleich eins, dh a e \u003d 1.
Offensichtlich, a= ein a e (ein - Vektormodul a). Dies folgt aus der Regel, nach der die Operation des Multiplizierens eines Skalars mit einem Vektor durchgeführt wird.
Einheitsvektoren oft mit den Koordinatenachsen des Koordinatensystems verbunden (insbesondere mit den Achsen des kartesischen Koordinatensystems). Anfahrt von diesen Vektoren stimmen mit den Richtungen der entsprechenden Achsen überein, und ihre Ursprünge werden oft mit dem Ursprung des Koordinatensystems kombiniert.
Daran möchte ich Sie erinnern Kartesisches Koordinatensystem im Raum wird traditionell als Tripel von zueinander senkrechten Achsen bezeichnet, die sich an einem Punkt schneiden, der als Ursprung bezeichnet wird. Die Koordinatenachsen werden üblicherweise mit den Buchstaben X, Y, Z bezeichnet und als Abszissenachse, Ordinatenachse bzw. Anwendungsachse bezeichnet. Descartes selbst verwendete nur eine Achse, auf der die Abszissen aufgetragen wurden. Verdienst der Verwendung SystemeÄxte gehören seinen Schülern. Daher der Satz Kartesisches Koordinatensystem historisch falsch. Besser reden rechteckig Koordinatensystem oder orthogonales Koordinatensystem. Trotzdem werden wir die Traditionen nicht ändern und in Zukunft davon ausgehen, dass das kartesische und das rechteckige (orthogonale) Koordinatensystem ein und dasselbe sind.
Einheitsvektor, entlang der X-Achse gerichtet, bezeichnet ich, Einheitsvektor, entlang der Y-Achse gerichtet, bezeichnet j, a Einheitsvektor, entlang der Z-Achse gerichtet, bezeichnet k. Vektoren ich, j, k namens Ort(Abb. 12, links), sie haben also Einzelmodule
i = 1, j = 1, k = 1.
Achsen u Ort rechtwinkliges Koordinatensystem teilweise haben sie andere Namen und Bezeichnungen. Die Abszissenachse X kann also als Tangentenachse bezeichnet werden, und ihr Einheitsvektor wird bezeichnet τ (griechischer Kleinbuchstabe Tau), die y-Achse ist die Normalachse, ihr Einheitsvektor ist bezeichnet n, die Anwendungsachse ist die Achse der Binormalen, ihr Einheitsvektor ist bezeichnet b. Warum die Namen ändern, wenn die Essenz gleich bleibt?
Tatsache ist, dass beispielsweise in der Mechanik bei der Untersuchung der Bewegung von Körpern sehr häufig ein rechtwinkliges Koordinatensystem verwendet wird. Wenn also das Koordinatensystem selbst bewegungslos ist und die Änderung der Koordinaten eines sich bewegenden Objekts in diesem bewegungslosen System verfolgt wird, dann bezeichnen die Achsen normalerweise X, Y, Z und ihre Ort bzw. ich, j, k.
Wenn sich ein Objekt jedoch entlang einer Art krummliniger Bahn bewegt (z. B. entlang eines Kreises), ist es häufig bequemer, mechanische Prozesse in einem Koordinatensystem zu betrachten, das sich mit diesem Objekt bewegt. Für ein solches bewegliches Koordinatensystem werden andere Namen der Achsen und ihrer Einheitsvektoren verwendet. Es wird einfach akzeptiert. In diesem Fall ist die X-Achse tangential zur Trajektorie an der Stelle ausgerichtet, an der sich dieses Objekt gerade befindet. Und dann heißt diese Achse nicht mehr X-Achse, sondern Tangentialachse, und ihr Einheitsvektor wird nicht mehr bezeichnet ich, a τ . Die Y-Achse ist entlang des Krümmungsradius der Trajektorie ausgerichtet (bei Bewegung in einem Kreis - zum Mittelpunkt des Kreises). Und da der Radius senkrecht zur Tangente steht, heißt die Achse die Achse der Normalen (Senkrechte und Normale sind dasselbe). Der Ort dieser Achse ist nicht mehr angegeben j, a n. Die dritte Achse (das frühere Z) steht senkrecht auf den beiden vorherigen. Dies ist eine Binormale mit einem Vektor b(Abb. 12, rechts). Übrigens in diesem Fall rechtwinkliges Koordinatensystem oft als "natürlich" oder natürlich bezeichnet.
Definition Eine geordnete Sammlung (x 1 , x 2 , ... , x n) n reeller Zahlen wird aufgerufen n-dimensionaler Vektor, und die Zahlen x i (i = ) - Komponenten oder Koordinaten,
Beispiel. Wenn beispielsweise ein bestimmtes Automobilwerk pro Schicht 50 Pkw, 100 Lkw, 10 Busse, 50 Pkw-Ersatzteilsätze und 150 Lkw- und Busersatzteile produzieren muss, kann das Produktionsprogramm dieses Werks wie folgt geschrieben werden: Vektor (50, 100 , 10, 50, 150), der fünf Komponenten hat.
Notation. Vektoren werden durch fettgedruckte Kleinbuchstaben oder Buchstaben mit einem Balken oder Pfeil oben gekennzeichnet, z. B. a oder. Die beiden Vektoren werden aufgerufen gleich wenn sie die gleiche Anzahl von Komponenten haben und ihre entsprechenden Komponenten gleich sind.
Vektorkomponenten sind nicht vertauschbar, z.B. (3, 2, 5, 0, 1) und (2, 3, 5, 0, 1) verschiedene Vektoren.
Operationen auf Vektoren. Arbeit
x= (x 1 , x 2 , ... , x n) in eine reelle Zahlλ Vektor genanntλ x= (λ x 1 , λ x 2 , ... , λ x n).
Summex= (x 1 , x 2 , ... , x n) und j= (y 1 , y 2 , ... ,y n) heißt Vektor x+y= (x 1 + y 1 , x 2 + y 2 , ... , x n + + y n).
Der Raum der Vektoren. N -dimensionaler Vektorraum R n ist definiert als die Menge aller n-dimensionalen Vektoren, für die die Operationen Multiplikation mit reellen Zahlen und Addition definiert sind.
Wirtschaftliche Darstellung. Eine ökonomische Darstellung eines n-dimensionalen Vektorraums: Raum der Ware (Waren). Unter Ware Wir werden eine Ware oder Dienstleistung verstehen, die zu einer bestimmten Zeit an einem bestimmten Ort zum Verkauf angeboten wurde. Angenommen, es gibt eine endliche Anzahl von verfügbaren Gütern n; Die vom Verbraucher jeweils gekauften Mengen sind durch eine Reihe von Waren gekennzeichnet
x= (x 1 , x 2 , ..., x n),
wobei x i die vom Verbraucher gekaufte Menge des i-ten Gutes bezeichnet. Wir nehmen an, dass alle Waren die Eigenschaft der beliebigen Teilbarkeit haben, sodass jede nicht negative Menge jeder von ihnen gekauft werden kann. Dann sind alle möglichen Gütermengen Vektoren des Güterraums C = ( x= (x 1 , x 2 , ... , x n) x ich ≥ 0, ich = ).
Lineare Unabhängigkeit.
System e 1 , e 2 , ... , e m n-dimensionale Vektoren genannt linear abhängig wenn es solche Zahlen gibtλ 1 , λ 2 , ... , λ m , von denen mindestens einer nicht Null ist, was die Gleichheit erfülltλ1 e 1 + λ2 e 2+...+λm e m = 0; andernfalls wird dieses System von Vektoren aufgerufen linear unabhängig, das heißt, diese Gleichheit ist nur dann möglich, wenn alle ![]() . Die geometrische Bedeutung der linearen Abhängigkeit von Vektoren in R 3 , interpretiert als gerichtete Segmente, erklären die folgenden Theoreme.
. Die geometrische Bedeutung der linearen Abhängigkeit von Vektoren in R 3 , interpretiert als gerichtete Segmente, erklären die folgenden Theoreme.
Satz 1. Ein aus einem einzigen Vektor bestehendes System ist genau dann linear abhängig, wenn dieser Vektor Null ist.
Satz 2. Damit zwei Vektoren linear abhängig sind, ist es notwendig und ausreichend, dass sie kollinear (parallel) sind.
Satz 3 . Damit drei Vektoren linear abhängig sind, ist es notwendig und ausreichend, dass sie koplanar sind (in derselben Ebene liegen).
Linkes und rechtes Tripel von Vektoren. Ein Tripel von nicht-koplanaren Vektoren a, b, c namens Rechts, wenn der Beobachter von ihrem gemeinsamen Ursprung die Enden der Vektoren umgeht a, b, c in dieser Reihenfolge scheint im Uhrzeigersinn fortzufahren. Ansonsten a, b, c -links dreifach. Alle rechten (oder linken) Tripel von Vektoren werden aufgerufen gleichermaßen orientiert.
Basis und Koordinaten. Troika e 1, e 2 , e 3 nicht koplanare Vektoren in R 3 angerufen Basis, und die Vektoren selbst e 1, e 2 , e 3 - Basic. Beliebiger Vektor a ist in Bezug auf Basisvektoren eindeutig erweiterbar, d.h. in der Form darstellbar
a= x 1 e 1 + x2 e 2 + x 3 e 3, (1.1)
die Zahlen x 1 , x 2 , x 3 in Erweiterung (1.1) genannt werden Koordinatena in grundlage e 1, e 2 , e 3 und sind bezeichnet a(x1, x2, x3).
Orthonormale Basis. Wenn die Vektoren e 1, e 2 , e 3 paarweise senkrecht stehen und die Länge von jedem von ihnen gleich eins ist, dann wird die Basis genannt orthonormal, und die Koordinaten x 1 , x 2 , x 3 - rechteckig. Die Basisvektoren einer orthonormalen Basis werden bezeichnet ich, j, k.
Wir werden das im Weltraum annehmen R 3 das rechte System kartesischer rechtwinkliger Koordinaten (0, ich, j, k}.
Vektorprodukt. Vektorgrafiken a pro Vektor b Vektor genannt c, die durch die folgenden drei Bedingungen bestimmt wird:
1. Vektorlänge c numerisch gleich der Fläche des auf den Vektoren aufgebauten Parallelogramms a und b, d.h.
c=
|a||b| Sünde( a^b).
2. Vektor c senkrecht zu jedem der Vektoren a und b.
3. Vektoren a, b und c, in dieser Reihenfolge genommen, bilden ein rechtes Tripel.
Für Vektorprodukt c Die Bezeichnung wird eingeführt c=[ab] oder
c = a
× b.
Wenn die Vektoren a und b kollinear sind, dann sin( a^b) = 0 und [ ab] = 0, insbesondere [ aa] = 0. Vektorprodukte von Orten: [ ij]=k, [jk] = ich, [Ki]=j.
Wenn die Vektoren a und b in der Grundlage angegeben ich, j, k Koordinaten a(ein 1 , ein 2 , ein 3), b(b 1 , b 2 , b 3), dann

Gemischte Arbeit. Ist das Kreuzprodukt zweier Vektoren a und b Skalar multipliziert mit dem dritten Vektor c, dann heißt ein solches Produkt aus drei Vektoren Mischprodukt und ist mit dem Symbol gekennzeichnet a v. Chr.
Wenn die Vektoren ein, b und c in grundlage ich, j, k durch ihre Koordinaten festgelegt
a(ein 1 , ein 2 , ein 3), b(b 1 , b 2 , b 3), c(c 1 , c 2 , c 3), dann
 .
.
Das gemischte Produkt hat eine einfache geometrische Interpretation - es ist ein Skalar, dessen Absolutwert gleich dem Volumen eines Parallelepipeds ist, das auf drei gegebenen Vektoren aufgebaut ist.
Wenn die Vektoren ein rechtes Tripel bilden, dann ist ihr gemischtes Produkt eine positive Zahl gleich dem angegebenen Volumen; wenn die drei a, b, c - dann links a b c<0 и V = - a b c, also V =|a b c|.
Die Koordinaten der in den Aufgaben des ersten Kapitels angetroffenen Vektoren werden als relativ zur rechten Orthonormalbasis angenommen. Einheitsvektor kodirektional zum Vektor a, durch das Symbol gekennzeichnet aÜber. Symbol r=Om bezeichnet durch den Radiusvektor des Punktes M, die Symbole a, AB bzw|a|, | AB |die Module von Vektoren sind bezeichnet a und AB.
Beispiel 1.2. Finde den Winkel zwischen Vektoren a= 2m+4n und b= m-n, wo m und n- Einheitsvektoren und Winkel dazwischen m und n gleich 120 o.
Entscheidung. Wir haben: cos φ = ab/ab, ab=(2m+4n) (m-n) = 2m 2 - 4n 2 +2Mn=
= 2 - 4+2cos120 o = -2 + 2(-0,5) = -3; ein = ; a 2 = (2m+4n) (2m+4n) =
= 4m 2 +16Mn+16n 2 = 4+16(-0,5)+16=12, also a = . b= ; b 2 =
= (m-n)(m-n) = m 2 -2Mn+n 2 =
1-2(-0,5)+1 = 3, also b = . Endlich haben wir: cosφ \u003d -1/2, φ \u003d 120 o.
Beispiel 1.3.Vektoren kennen AB(-3,-2,6) und BC(-2,4,4), berechne die Höhe AD des Dreiecks ABC.
Entscheidung. Wenn wir die Fläche des Dreiecks ABC mit S bezeichnen, erhalten wir:
S = 1/2 v. Chr. n. Chr. Dann AD=2S/BC, BC== ![]() = 6,
= 6,
S = 1/2| AB ×AC |.
AC=AB+BC, also der Vektor AC hat Koordinaten
.
.
Beispiel 1.4 . Gegeben zwei Vektoren a(11,10,2) und b(4,0,3). Finde den Einheitsvektor c, orthogonal zu Vektoren a und b und so gerichtet, dass das geordnete Tripel von Vektoren a, b, c hatte Recht.
Entscheidung.Lassen Sie uns die Koordinaten des Vektors bezeichnen c in Bezug auf die gegebene rechte Orthonormalbasis in Bezug auf x, y, z.
Soweit c ⊥ a, c ⊥b, dann ca= 0, kb= 0. Durch die Bedingung des Problems ist es erforderlich, dass c = 1 und a b c >0.
Wir haben ein Gleichungssystem, um x,y,z zu finden: 11x +10y + 2z = 0, 4x+3z=0, x 2 + y 2 + z 2 = 0.
Aus der ersten und zweiten Gleichung des Systems erhalten wir z = -4/3 x, y = -5/6 x. Setzen wir y und z in die dritte Gleichung ein, erhalten wir: x 2 = 36/125, woher
x=±
. Bedingung verwenden a b c > 0 erhalten wir die Ungleichung

Unter Berücksichtigung der Ausdrücke für z und y schreiben wir die resultierende Ungleichung in die Form um: 625/6 x > 0, woraus folgt, dass x > 0. Also x = , y = - , z = - .
Definition. Das Vektorprodukt eines Vektors a (Multiplikator) mit einem nicht kollinearen Vektor (Multiplikator) ist der dritte Vektor c (Produkt), der wie folgt aufgebaut ist:
1) sein Modul ist numerisch gleich Fläche Parallelogramm in Abb. 155), auf Vektoren aufgebaut, d.h. es ist gleich der Richtung senkrecht zur Ebene des erwähnten Parallelogramms;
3) In diesem Fall wird die Richtung des Vektors c (aus zwei möglichen) so gewählt, dass die Vektoren c ein rechtshändiges System bilden (§ 110).
Bezeichnung: bzw
Ergänzung zur Definition. Wenn die Vektoren kollinear sind und die Figur als (bedingtes) Parallelogramm betrachtet wird, ist es natürlich, eine Nullfläche zuzuweisen. Also das Vektorprodukt Kollineare Vektoren wird als gleich dem Nullvektor angesehen.

Da dem Nullvektor jede Richtung zugeordnet werden kann, widerspricht diese Konvention nicht den Punkten 2 und 3 der Definition.
Bemerkung 1. Im Begriff "Vektorprodukt" gibt das erste Wort an, dass das Ergebnis der Aktion ein Vektor ist (im Gegensatz zu Skalarprodukt; vgl. § 104, Anm. 1).
Beispiel 1. Finden Sie das Vektorprodukt, wo die Hauptvektoren des rechten Koordinatensystems (Abb. 156).
1. Da die Längen der Hauptvektoren gleich der Skaleneinheit sind, ist die Fläche des Parallelogramms (Quadrat) numerisch gleich eins. Daher ist der Modul des Vektorprodukts gleich eins.
2. Da die Senkrechte zur Ebene die Achse ist, ist das gewünschte Vektorprodukt ein Vektor, der kollinear zum Vektor k ist; und da beide Modul 1 haben, ist das erforderliche Kreuzprodukt entweder k oder -k.
3. Von diesen beiden möglichen Vektoren muss der erste gewählt werden, da die Vektoren k ein rechtes System bilden (und die Vektoren ein linkes).
Beispiel 2. Finden Sie das Kreuzprodukt
Entscheidung. Wie in Beispiel 1 schließen wir daraus, dass der Vektor entweder k oder -k ist. Aber jetzt müssen wir -k wählen, da die Vektoren das rechte System bilden (und die Vektoren das linke). So,
Beispiel 3 Die Vektoren haben eine Länge von 80 bzw. 50 cm und bilden einen Winkel von 30°. Nimm einen Meter als Längeneinheit und bestimme die Länge des Vektorprodukts a

Entscheidung. Die Fläche eines auf Vektoren aufgebauten Parallelogramms ist gleich Die Länge des gewünschten Vektorprodukts ist gleich
Beispiel 4. Ermitteln Sie die Länge des Kreuzprodukts derselben Vektoren, indem Sie einen Zentimeter als Längeneinheit nehmen.
Entscheidung. Da die Fläche des auf Vektoren aufgebauten Parallelogramms gleich der Länge des Vektorprodukts ist, beträgt 2000 cm, d.h.
Aus einem Vergleich der Beispiele 3 und 4 ist ersichtlich, dass die Länge des Vektors nicht nur von den Längen der Faktoren abhängt, sondern auch von der Wahl der Längeneinheit.
physikalische Bedeutung Vektorprodukt. Von den zahlreichen physikalische Quantitäten, dargestellt durch ein Vektorprodukt, betrachten nur das Kraftmoment.
Sei A der Angriffspunkt der Kraft. Das Kraftmoment relativ zum Punkt O wird als Vektorprodukt bezeichnet. Da das Modul dieses Vektorprodukts numerisch gleich der Fläche des Parallelogramms ist (Abb. 157), Der Momentenmodul ist gleich dem Produkt aus Basis und Höhe, d. h. der Kraft multipliziert mit dem Abstand vom Punkt O zur geraden Linie, entlang der die Kraft wirkt.
In der Mechanik ist bewiesen, dass für das Gleichgewicht eines starren Körpers nicht nur die Summe der Vektoren, die die auf den Körper wirkenden Kräfte darstellen, sondern auch die Summe der Kraftmomente gleich Null sein muss. Wenn alle Kräfte parallel zu derselben Ebene sind, kann die Addition der Vektoren, die die Momente darstellen, durch die Addition und Subtraktion ihrer Beträge ersetzt werden. Aber für beliebige Kraftrichtungen ist eine solche Ersetzung unmöglich. Dementsprechend ist das Kreuzprodukt genau als Vektor und nicht als Zahl definiert.

