एक सदिश उत्पाद की अवधारणा देने से पहले, आइए हम त्रिविमीय समष्टि में सदिशों a → , b → , c → के क्रमित त्रिक के उन्मुखीकरण के प्रश्न की ओर मुड़ें।
आरंभ करने के लिए, आइए एक बिंदु से सदिश a → , b → , c → को अलग रखें। त्रिगुण a → , b → , c → का अभिविन्यास सदिश c → की दिशा के आधार पर दाएं या बाएं है। जिस दिशा में वेक्टर a → से b → सदिश c → के सिरे से सबसे छोटा घुमाव बनाया जाता है, उस दिशा से त्रिक a → , b → , c → का रूप निर्धारित किया जाएगा।
यदि सबसे छोटा घूर्णन वामावर्त है, तो सदिश a → , b → , c → के त्रिक को कहा जाता है सहीयदि दक्षिणावर्त - बाएं.
इसके बाद, दो असंरेखीय सदिश a → और b → लीजिए। आइए फिर बिंदु A से सदिश A B → = a → और A C → = b → को स्थगित करें। आइए हम एक सदिश A D → = c → की रचना करें, जो A B → और A C → दोनों के साथ-साथ लंबवत है। इस प्रकार, सदिश A D → = c → की रचना करते समय, हम इसे एक दिशा या विपरीत दिशा देते हुए दो कार्य कर सकते हैं (चित्रण देखें)।

सदिशों की क्रमबद्ध तिकड़ी a → , b → , c → हो सकती है, जैसा कि हमने पाया, सदिश की दिशा के आधार पर दाएं या बाएं।
ऊपर से, हम एक वेक्टर उत्पाद की परिभाषा पेश कर सकते हैं। यह परिभाषामें परिभाषित दो वैक्टर के लिए दिया गया आयताकार प्रणाली COORDINATES त्रि-आयामी अंतरिक्ष.
परिभाषा 1
दो सदिशों a → और b → . का सदिश गुणनफल हम त्रि-आयामी अंतरिक्ष के आयताकार समन्वय प्रणाली में दिए गए ऐसे वेक्टर को कॉल करेंगे जैसे कि:
- यदि सदिश a → और b → संरेख हैं, तो यह शून्य होगा;
- यह सदिश a → तथा सदिश b → दोनों के लम्बवत् होगा अर्थात्। ∠ ए → सी → = ∠ बी → सी → = π 2;
- इसकी लंबाई सूत्र द्वारा निर्धारित की जाती है: c → = a → b → sin ∠ a → , b → ;
- सदिशों के त्रिक a → , b → , c → में दिए गए निर्देशांक प्रणाली के समान अभिविन्यास है।
वेक्टर उत्पादवैक्टर a → और b → में निम्नलिखित संकेतन हैं: a → × b →।
क्रॉस उत्पाद निर्देशांक
चूंकि किसी भी वेक्टर के निर्देशांक प्रणाली में कुछ निर्देशांक होते हैं, इसलिए क्रॉस उत्पाद की दूसरी परिभाषा पेश करना संभव है, जो आपको वैक्टर के दिए गए निर्देशांक से इसके निर्देशांक खोजने की अनुमति देगा।
परिभाषा 2
त्रि-आयामी अंतरिक्ष की एक आयताकार समन्वय प्रणाली में दो सदिशों a → = (a x ; a y ; a z) और b → = (b x ; b y ; b z) का सदिश गुणनफल सदिश c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → कहें, जहां i → , j → , k → निर्देशांक सदिश हैं।
वेक्टर उत्पाद को एक निर्धारक के रूप में दर्शाया जा सकता है वर्ग मैट्रिक्सतीसरे क्रम में, जहाँ पहली पंक्ति सदिश i → , j → , k → है, दूसरी पंक्ति में सदिश a → के निर्देशांक हैं, और तीसरी पंक्ति में दिए गए आयताकार निर्देशांक में सदिश b → के निर्देशांक हैं। प्रणाली, यह मैट्रिक्स निर्धारक इस तरह दिखता है: c → = a → × b → = i → j → k → a x a y a z b x b y b z
पहली पंक्ति के तत्वों पर इस सारणिक का विस्तार करने पर, हम समानता प्राप्त करते हैं: c → = a → × b → = i → j → k → a x a y a z b x b y b z = a y a z b y b z i → - a x a z b x b z j → + a x a y b x b y k → = a → × b → = ( a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →
क्रॉस उत्पाद गुण
यह ज्ञात है कि निर्देशांक में वेक्टर उत्पाद को मैट्रिक्स c → = a → × b → = i → j → k → a x a y a z b x b y b z के निर्धारक के रूप में दर्शाया जाता है, फिर आधार पर मैट्रिक्स निर्धारक गुणनिम्नलिखित वेक्टर उत्पाद गुण:
- प्रतिकम्यूटेटिविटी a → × b → = - b → × a →;
- वितरण a (1) → + a (2) → × b = a (1) → × b → + a (2) → × b → या a → × b (1) → + b (2) → = a → × बी (1) → + ए → × बी (2) →;
- साहचर्यता a → × b → = a → × b → या a → × (λ b →) = a → × b → जहाँ λ एक मनमाना वास्तविक संख्या है।
इन गुणों के जटिल प्रमाण नहीं हैं।
उदाहरण के लिए, हम एक वेक्टर उत्पाद की एंटीकम्यूटेटिविटी संपत्ति को साबित कर सकते हैं।
एंटीकम्यूटेटिविटी का सबूत
परिभाषा के अनुसार, a → × b → = i → j → k → a x a y a z b x b y b z और b → × a → = i → j → k → b x b y b z a x a y a z । और यदि मैट्रिक्स की दो पंक्तियों को आपस में बदल दिया जाए, तो मैट्रिक्स के सारणिक का मान विपरीत में बदल जाना चाहिए, इसलिए, a → × b → = i → j → k → a x a y a z b x b y b z = - i → j → k → b x b y b z a x a y a z = - b → × a → , जो सदिश गुणनफल की प्रतिकम्यूटेटिविटी को सिद्ध करता है।
वेक्टर उत्पाद - उदाहरण और समाधान
ज्यादातर मामलों में, तीन प्रकार के कार्य होते हैं।
पहले प्रकार की समस्याओं में, दो वैक्टर की लंबाई और उनके बीच का कोण आमतौर पर दिया जाता है, लेकिन आपको क्रॉस उत्पाद की लंबाई खोजने की आवश्यकता होती है। इस मामले में, निम्न सूत्र c → = a → b → sin ∠ a → , b → का उपयोग करें।
उदाहरण 1
वैक्टर a → और b → के क्रॉस उत्पाद की लंबाई पाएं यदि a → = 3 , b → = 5 , ∠ a → , b → = π 4 ज्ञात हो।
फेसला
वैक्टर a → और b → के वेक्टर उत्पाद की लंबाई की परिभाषा का उपयोग करके हम हल करते हैं इस कार्य: a → × b → = a → b → sin ∠ a →, b → = 3 5 sin π 4 = 15 2 2।
जवाब: 15 2 2 .
दूसरे प्रकार के कार्यों का वैक्टर के निर्देशांक के साथ संबंध होता है, उनमें एक वेक्टर उत्पाद, इसकी लंबाई आदि होते हैं। के माध्यम से खोजा गया ज्ञात निर्देशांकदिए गए वैक्टर ए → = (ए एक्स; ए वाई; ए जेड) और बी → = (बी एक्स; बी वाई; बी जेड) .
इस प्रकार के कार्य के लिए, आप कार्यों के लिए बहुत सारे विकल्प हल कर सकते हैं। उदाहरण के लिए, सदिश a → और b → के निर्देशांक नहीं, बल्कि के पदों में उनके प्रसार निर्देशांक वैक्टरतरह बी → = बी एक्स आई → + बी वाई जे → + बी जेड के → और c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → या सदिश a → और b → उनके निर्देशांकों द्वारा दिए जा सकते हैं प्रारंभ और अंत बिंदु।
निम्नलिखित उदाहरणों पर विचार करें।
उदाहरण 2
एक आयताकार निर्देशांक प्रणाली में दो वैक्टर सेट होते हैं a → = (2; 1; - 3), b → = (0; - 1; 1)। उनके वेक्टर उत्पाद का पता लगाएं।
फेसला
दूसरी परिभाषा के अनुसार, हम दो वैक्टरों के वेक्टर उत्पाद को पाते हैं दिए गए निर्देशांक: a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → = = (1 1 - (- 3) (- 1)) i → + (( - 3) 0 - 2 1) j → + (2 (- 1) - 1 0) k → = = - 2 i → - 2 j → - 2 k →।
यदि हम क्रॉस उत्पाद को मैट्रिक्स निर्धारक के पदों में लिखते हैं, तो समाधान यह उदाहरणइस तरह दिखता है: a → × b → = i → j → k → a x a y a z b x b y b z = i → j → k → 2 1 - 3 0 - 1 1 = - 2 i → - 2 j → - 2 k → ।
जवाब: a → × b → = - 2 i → - 2 j → - 2 k →।
उदाहरण 3
सदिश i → - j → और i → + j → + k → के क्रॉस उत्पाद की लंबाई ज्ञात कीजिए, जहां i → , j → , k → - एक आयताकार कार्तीय निर्देशांक प्रणाली के orts।
फेसला
सबसे पहले, दिए गए आयताकार निर्देशांक प्रणाली में दिए गए वेक्टर उत्पाद i → - j → × i → + j → + k → के निर्देशांक ज्ञात करें।
यह ज्ञात है कि सदिश i → - j → और i → + j → + k → के निर्देशांक क्रमशः (1 ; - 1 ; 0) और (1 ; 1 ; 1) हैं। मैट्रिक्स निर्धारक का उपयोग करके वेक्टर उत्पाद की लंबाई पाएं, तो हमारे पास i → - j → × i → + j → + k → = i → j → k → 1 - 1 0 1 1 1 = - i → - j → + 2 के →।
इसलिए, दिए गए निर्देशांक प्रणाली में वेक्टर उत्पाद i → - j → × i → + j → + k → के निर्देशांक (- 1 ; - 1 ; 2) हैं।
हम सूत्र द्वारा वेक्टर उत्पाद की लंबाई पाते हैं (वेक्टर की लंबाई खोजने पर अनुभाग देखें): i → - j → × i → + j → + k → = - 1 2 + - 1 2 + 2 2 = 6.
जवाब: i → - j → × i → + j → + k → = 6। .
उदाहरण 4
एक आयताकार में कार्तीय प्रणालीनिर्देशांक तीन बिंदुओं A (1 , 0 , 1) , B (0 , 2 , 3) , C (1 , 4 , 2) के निर्देशांक हैं। एक ही समय में A B → और A C → पर लंबवत कुछ सदिश खोजें।
फेसला
सदिश A B → और A C → में क्रमशः निम्नलिखित निर्देशांक (- 1; 2; 2) और (0; 4; 1) हैं। वैक्टर A B → और A C → के वेक्टर उत्पाद को खोजने के बाद, यह स्पष्ट है कि यह A B → और A C → दोनों की परिभाषा के अनुसार एक लंबवत वेक्टर है, अर्थात यह हमारी समस्या का समाधान है। इसे A B → × A C → = i → j → k → - 1 2 2 0 4 1 = - 6 i → + j → - 4 k → खोजें।
जवाब: - 6 मैं → + जे → - 4 के →। लंबवत वैक्टर में से एक है।
तीसरे प्रकार की समस्याएं वैक्टर के वेक्टर उत्पाद के गुणों का उपयोग करने पर केंद्रित हैं। जिसे लागू करने के बाद, हम दी गई समस्या का समाधान प्राप्त करेंगे।
उदाहरण 5
सदिश a → और b → लंबवत हैं और उनकी लंबाई क्रमशः 3 और 4 है। क्रॉस उत्पाद की लंबाई ज्ञात कीजिए 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = 3 a → × a → + 3 ए → × - 2 बी → + - बी → × ए → + - बी → × - 2 बी →।
फेसला
सदिश उत्पाद के वितरण गुण से, हम लिख सकते हैं 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 ए → × ए → + 3 ए → × - 2 बी → + - बी → × ए → + - बी → × - 2 बी →
साहचर्यता की संपत्ति से, हम अंतिम अभिव्यक्ति में वेक्टर उत्पादों के संकेत से परे संख्यात्मक गुणांक निकालते हैं: 3 ए → × ए → + 3 ए → × - 2 बी → + - बी → × ए → + - बी → × - 2 बी → = = 3 ए → × ए → + 3 (- 2) ए → × बी → + (- 1) बी → × ए → + (- 1) (- 2) बी → × बी → = = 3 ए → × ए → - 6 ए → × बी → - बी → × ए → + 2 बी → × बी →
वेक्टर उत्पाद a → × a → और b → × b → 0 के बराबर हैं, क्योंकि a → × a → = a → a → sin 0 = 0 और b → × b → = b → b → sin 0 = 0, फिर 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b → = - 6 a → × b → - b → × a →। .
वेक्टर उत्पाद की एंटीकम्यूटेटिविटी से यह निम्नानुसार है - 6 ए → × बी → - बी → × ए → = - 6 ए → × बी → - (- 1) ए → × बी → = - 5 ए → × बी →। .
वेक्टर उत्पाद के गुणों का उपयोग करके, हम समानता प्राप्त करते हैं 3 · a → - b → × a → - 2 · b → = - 5 · a → × b →।
शर्त के अनुसार, सदिश a → और b → लंबवत हैं, अर्थात उनके बीच का कोण π 2 के बराबर है। अब यह केवल पाए गए मानों को संबंधित सूत्रों में प्रतिस्थापित करने के लिए रहता है: 3 ए → - बी → × ए → - 2 बी → = - 5 ए → × बी → = = 5 ए → × बी → = 5 ए → बी → पाप (ए →, बी →) = 5 3 4 पाप π 2 = 60।
जवाब: 3 ए → - बी → × ए → - 2 बी → = 60।
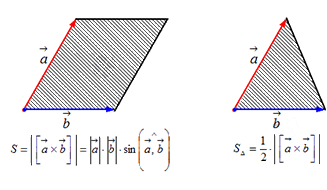
परिभाषा के अनुसार वैक्टर के क्रॉस उत्पाद की लंबाई है a → × b → = a → · b → · sin ∠ a → , b → । चूंकि यह पहले से ही ज्ञात है (से स्कूल पाठ्यक्रम) कि एक त्रिभुज का क्षेत्रफल उसकी दो भुजाओं की लंबाई का आधा गुणनफल होता है, जो दी गई भुजाओं के बीच के कोण की ज्या से गुणा होता है। इसलिए, वेक्टर उत्पाद की लंबाई समांतर चतुर्भुज के क्षेत्र के बराबर होती है - एक दोगुना त्रिकोण, अर्थात्, वैक्टर के रूप में पक्षों का उत्पाद a → और b → , एक बिंदु से, साइन द्वारा रखी जाती है उनके बीच के कोण का sin ∠ a → , b → ।
यह वही है ज्यामितीय अर्थवेक्टर उत्पाद।
वेक्टर उत्पाद का भौतिक अर्थ
यांत्रिकी में, भौतिकी की शाखाओं में से एक, वेक्टर उत्पाद के लिए धन्यवाद, आप अंतरिक्ष में एक बिंदु के सापेक्ष बल के क्षण को निर्धारित कर सकते हैं।
परिभाषा 3
बिंदु A के सापेक्ष बिंदु B पर लागू बल F → के क्षण के तहत हम निम्नलिखित वेक्टर उत्पाद A B → × F → को समझेंगे।
यदि आप टेक्स्ट में कोई गलती देखते हैं, तो कृपया उसे हाइलाइट करें और Ctrl+Enter दबाएं
7.1 क्रॉस उत्पाद की परिभाषा
तीन गैर-समतलीय सदिश a , b और c , संकेतित क्रम में लिए गए, एक दायां ट्रिपल बनाते हैं यदि तीसरे वेक्टर c के अंत से पहले वेक्टर a से दूसरे वेक्टर b में सबसे छोटा मोड़ वामावर्त देखा जाता है, और एक बाएं अगर दक्षिणावर्त (चित्र देखें। सोलह)।
सदिश a और सदिश b के सदिश गुणनफल को सदिश c कहते हैं, जो :
1. सदिश a और b के लंबवत, अर्थात c ^ a और c ^ बी;
2. इसकी लंबाई संख्यात्मक रूप से वैक्टर a और . पर बने समांतर चतुर्भुज के क्षेत्रफल के बराबर होती हैबीपक्षों के रूप में (अंजीर देखें। 17), अर्थात्।
3. सदिश a , b और c एक लम्ब त्रिक बनाते हैं।


सदिश गुणनफल को a x b या [a,b] निरूपित किया जाता है। एक सदिश उत्पाद की परिभाषा से, मेरे द्वारा सीधे अनुसरण किए जाने वाले orts के बीच निम्नलिखित संबंध, जेऔर क(अंजीर देखें। 18):
आई एक्स जे \u003d के, जे एक्स के \u003d आई, के एक्स आई \u003d जे।
आइए हम सिद्ध करें, उदाहरण के लिए, किमैं एक्सजे \u003d के।
1) के ^ आई, के ^ जे;
2) |k |=1, लेकिन | मैं एक्स जे| = |मैं | |जे| पाप (90°)=1;
3) सदिश i , j और कएक सही ट्रिपल बनाएं (चित्र 16 देखें)।
7.2. क्रॉस उत्पाद गुण
1. जब कारकों को पुनर्व्यवस्थित किया जाता है, तो वेक्टर उत्पाद संकेत बदलता है, अर्थात। और xb \u003d (b xa) (चित्र 19 देखें)।
वेक्टर a xb और b xa समरेखीय हैं, समान मॉड्यूल हैं (समांतर चतुर्भुज का क्षेत्र अपरिवर्तित रहता है), लेकिन विपरीत दिशा में निर्देशित होते हैं (विपरीत अभिविन्यास के ट्रिपल ए, बी, ए एक्सबी और ए, बी, बी एक्स ए)। वह है कुल्हाड़ी = -(बीएक्सए).
2. वेक्टर उत्पाद है संबंधी संपत्तिएक अदिश कारक के संबंध में, अर्थात l (a xb) \u003d (l a) x b \u003d a x (l b)।

चलो एल> 0। सदिश l (a xb) सदिश a और b के लंबवत है। वेक्टर ( मैंए) एक्स बीसदिश a और . के लंबवत भी है बी(वेक्टर ए, मैंलेकिन एक ही विमान में झूठ)। तो वैक्टर मैं(ए एक्सबी) और ( मैंए) एक्स बीसमरेख। यह स्पष्ट है कि उनकी दिशाएँ मेल खाती हैं। उनकी लंबाई समान है:
इसलिए मैं(ए एक्सबी) = मैंएक एक्सबी। यह इसी प्रकार सिद्ध होता है मैं<0.
3. दो शून्येतर सदिश a और बीसंरेख हैं यदि और केवल यदि उनका सदिश गुणनफल शून्य सदिश के बराबर है, अर्थात, और ||b<=>और एक्सबी \u003d 0.

विशेष रूप से, i *i =j *j =k *k =0 ।
4. वेक्टर उत्पाद में वितरण गुण होता है:
(ए+बी) xs = a xs + बीएक्सएस
बिना सबूत के स्वीकार करें।
7.3. निर्देशांक के संदर्भ में क्रॉस उत्पाद अभिव्यक्ति
हम वेक्टर क्रॉस उत्पाद तालिका i का उपयोग करेंगे, जेऔर कश्मीर:

यदि पहले वेक्टर से दूसरे तक सबसे छोटे पथ की दिशा तीर की दिशा के साथ मेल खाती है, तो उत्पाद तीसरे वेक्टर के बराबर है, यदि यह मेल नहीं खाता है, तो तीसरा वेक्टर ऋण चिह्न के साथ लिया जाता है।
माना दो सदिश a =a x i +a y जे+अज़ी कऔर बी = बीएक्स मैं+द्वारा जे+bz क. आइए इन वैक्टरों के वेक्टर उत्पाद को बहुपद के रूप में गुणा करके (वेक्टर उत्पाद के गुणों के अनुसार) खोजें:

![]()
परिणामी सूत्र को और भी छोटा लिखा जा सकता है:

चूँकि समानता का दायाँ पक्ष (7.1) पहली पंक्ति के तत्वों के संदर्भ में तीसरे क्रम के निर्धारक के विस्तार से मेल खाता है। समानता (7.2) को याद रखना आसान है।
7.4. क्रॉस उत्पाद के कुछ अनुप्रयोग
सदिशों की संरेखता स्थापित करना

एक समांतर चतुर्भुज और एक त्रिभुज का क्षेत्रफल ज्ञात करना
वैक्टर के क्रॉस उत्पाद की परिभाषा के अनुसार एऔर बी |ए एक्सबी | =|ए | * |b |sin g , यानी S par = |a x b |। और, इसलिए, डी एस \u003d 1/2 | ए एक्स बी |।
एक बिंदु के बारे में बल के क्षण का निर्धारण
मान लीजिए बिंदु A पर एक बल लगाया जाता है एफ = एबीजाने दो हे- अंतरिक्ष में कुछ बिंदु (चित्र 20 देखें)।

भौतिकी से ज्ञात होता है कि टॉर्कः एफ बिंदु के सापेक्ष हेवेक्टर कहा जाता है एम ,जो बिंदु . से होकर गुजरता है हेऔर:
1) बिन्दुओं से गुजरने वाले तल के लंबवत् ओ, ए, बी;
2) संख्यात्मक रूप से बल और कंधे के उत्पाद के बराबर
3) सदिश OA और A B के साथ एक सम त्रिक बनाता है।
इसलिए, एम \u003d ओए एक्स एफ।
घूर्णन की रैखिक गति ज्ञात करना
रफ़्तार वीअंक एम ठोस बॉडी, कोणीय वेग से घूर्णन वूएक निश्चित अक्ष के चारों ओर, यूलर सूत्र v \u003d w x r द्वारा निर्धारित किया जाता है, जहाँ r \u003d OM, जहाँ O अक्ष का कुछ निश्चित बिंदु है (चित्र 21 देखें)।

इकाई वेक्टर- यह वेक्टर, जिसका निरपेक्ष मान (मापांक) एक के बराबर होता है। एक इकाई वेक्टर को निरूपित करने के लिए, हम सबस्क्रिप्ट ई का उपयोग करेंगे। इसलिए, यदि एक वेक्टर दिया गया है ए, तो इसका इकाई सदिश सदिश होगा एई. यह इकाई वेक्टर उसी दिशा में इंगित करता है जिस दिशा में स्वयं वेक्टर होता है ए, और इसका मापांक एक के बराबर है, अर्थात एक ई \u003d 1.
स्पष्टतः, ए= ए एई (ए - वेक्टर मापांक ए). यह उस नियम का अनुसरण करता है जिसके द्वारा एक अदिश को एक सदिश से गुणा करने की संक्रिया की जाती है।
यूनिट वैक्टरअक्सर समन्वय प्रणाली के समन्वय अक्षों से जुड़ा होता है (विशेष रूप से, कार्टेशियन समन्वय प्रणाली की कुल्हाड़ियों के साथ)। इनकी दिशा वैक्टरसंबंधित अक्षों की दिशाओं के साथ मेल खाता है, और उनकी उत्पत्ति को अक्सर समन्वय प्रणाली की उत्पत्ति के साथ जोड़ा जाता है।
मैं आपको याद दिला दूं कि कार्तीय समन्वय प्रणालीअंतरिक्ष में पारंपरिक रूप से एक बिंदु पर परस्पर लंबवत अक्षों का एक तिहाई कहा जाता है जिसे मूल कहा जाता है। निर्देशांक अक्षों को आमतौर पर X, Y, Z अक्षरों से दर्शाया जाता है और उन्हें क्रमशः भुज अक्ष, कोटि अक्ष और अनुप्रयुक्त अक्ष कहा जाता है। डेसकार्टेस ने स्वयं केवल एक अक्ष का उपयोग किया था, जिस पर एब्सिसास प्लॉट किए गए थे। उपयोग की योग्यता प्रणालीकुल्हाड़ी उसके छात्रों की है। इसलिए वाक्यांश कार्तीय समन्वय प्रणालीऐतिहासिक रूप से गलत बेहतर बात आयताकार समन्वय प्रणालीया ओर्थोगोनल समन्वय प्रणाली. फिर भी, हम परंपराओं को नहीं बदलेंगे और भविष्य में हम मान लेंगे कि कार्टेशियन और आयताकार (ऑर्थोगोनल) समन्वय प्रणाली एक समान हैं।
इकाई वेक्टर, एक्स अक्ष के साथ निर्देशित, निरूपित है मैं, इकाई वेक्टर, Y अक्ष के साथ निर्देशित, निरूपित है जे, ए इकाई वेक्टर, Z अक्ष के साथ निर्देशित, निरूपित है क. वैक्टर मैं, जे, कबुलाया orts(चित्र 12, बाएं), उनके पास एकल मॉड्यूल हैं, जो है
मैं = 1, जे = 1, के = 1।
कुल्हाड़ियों और orts आयताकार समन्वय प्रणालीकुछ मामलों में उनके अन्य नाम और पदनाम होते हैं। तो, भुज अक्ष X को स्पर्शरेखा अक्ष कहा जा सकता है, और इसका इकाई सदिश निरूपित किया जाता है τ (ग्रीक छोटा अक्षर ताऊ), y-अक्ष सामान्य अक्ष है, इसका इकाई सदिश निरूपित किया जाता है एन, अनुप्रयुक्त अक्ष द्विअसामान्य की धुरी है, इसकी इकाई वेक्टर निरूपित है बी. अगर सार वही रहता है तो नाम क्यों बदलें?
तथ्य यह है कि, उदाहरण के लिए, यांत्रिकी में, निकायों की गति का अध्ययन करते समय, एक आयताकार समन्वय प्रणाली का उपयोग अक्सर किया जाता है। इसलिए, यदि समन्वय प्रणाली स्वयं गतिहीन है, और एक गतिमान वस्तु के निर्देशांक में परिवर्तन को इस गतिहीन प्रणाली में ट्रैक किया जाता है, तो आमतौर पर अक्ष एक्स, वाई, जेड और उनके ortsक्रमश: मैं, जे, क.
लेकिन अक्सर, जब कोई वस्तु किसी प्रकार के घुमावदार प्रक्षेपवक्र (उदाहरण के लिए, एक वृत्त के साथ) के साथ चलती है, तो इस वस्तु के साथ चलने वाली एक समन्वय प्रणाली में यांत्रिक प्रक्रियाओं पर विचार करना अधिक सुविधाजनक होता है। ऐसी गतिमान समन्वय प्रणाली के लिए अक्षों के अन्य नामों और उनके इकाई सदिशों का उपयोग किया जाता है। यह अभी स्वीकार किया गया है। इस मामले में, एक्स-अक्ष को उस बिंदु पर प्रक्षेपवक्र के लिए स्पर्शरेखा रूप से निर्देशित किया जाता है जहां यह वस्तु वर्तमान में स्थित है। और फिर इस अक्ष को अब X अक्ष नहीं कहा जाता है, लेकिन स्पर्शरेखा अक्ष, और इसका इकाई वेक्टर अब निरूपित नहीं किया जाता है मैं, ए τ . Y अक्ष को प्रक्षेपवक्र की वक्रता त्रिज्या के साथ निर्देशित किया जाता है (एक सर्कल में आंदोलन के मामले में - सर्कल के केंद्र तक)। और चूंकि त्रिज्या स्पर्शरेखा के लंबवत है, अक्ष को सामान्य की धुरी कहा जाता है (लंबवत और सामान्य एक ही चीज है)। इस अक्ष का ओर्ट अब निरूपित नहीं किया जाता है जे, ए एन. तीसरा अक्ष (पूर्व Z) पिछले दो अक्षों के लंबवत है। यह एक सदिश के साथ एक द्विअसामान्य है बी(चित्र 12, दाएं)। वैसे, इस मामले में आयताकार समन्वय प्रणालीअक्सर "प्राकृतिक" या प्राकृतिक के रूप में जाना जाता है।
परिभाषा वास्तविक संख्याओं का क्रमित संग्रह (x 1, x 2, ..., x n) n कहलाता है एन-आयामी वेक्टर, और संख्याएँ x i (i = ) - अवयवया निर्देशांक,
उदाहरण। यदि, उदाहरण के लिए, एक निश्चित ऑटोमोबाइल प्लांट को 50 कारों, 100 ट्रकों, 10 बसों, कारों के लिए 50 स्पेयर पार्ट्स और प्रति शिफ्ट ट्रक और बसों के लिए 150 सेट का उत्पादन करना है, तो इस प्लांट के उत्पादन कार्यक्रम को एक के रूप में लिखा जा सकता है वेक्टर (50, 100, 10, 50, 150), जिसमें पाँच घटक हैं।
संकेतन। सदिशों को बड़े अक्षरों या अक्षरों द्वारा निरूपित किया जाता है, जिसमें शीर्ष पर एक बार या तीर होता है, उदाहरण के लिए, एया. दो वैक्टर को कहा जाता है बराबरयदि उनके घटकों की संख्या समान है और उनके संगत घटक समान हैं।
वेक्टर घटकों को आपस में बदला नहीं जा सकता, जैसे (3, 2, 5, 0, 1)और (2, 3, 5, 0, 1) विभिन्न सदिश।
वैक्टर पर संचालन।काम
एक्स= (x 1 , x 2 , ... ,x n) एक वास्तविक संख्या के लिएλ वेक्टर कहा जाता हैλ एक्स= (λ x 1 , λ x 2 , ... , x n)।
जोड़एक्स= (एक्स 1, एक्स 2, ..., एक्स एन) और आप= (y 1 , y 2 , ... ,y n) को सदिश कहा जाता है एक्स+वाई= (x 1 + y 1, x 2 + y 2, ..., x n + + y n)।
वैक्टर का स्थान।एन -आयामी वेक्टर अंतरिक्ष आर n को सभी n-आयामी सदिशों के समुच्चय के रूप में परिभाषित किया गया है जिसके लिए वास्तविक संख्याओं और योग द्वारा गुणन की संक्रियाओं को परिभाषित किया गया है।
आर्थिक चित्रण। एक एन-आयामी वेक्टर अंतरिक्ष का एक आर्थिक चित्रण: माल की जगह (चीज़ें) नीचे वस्तुहम कुछ अच्छी या सेवा को समझेंगे जो एक निश्चित स्थान पर एक निश्चित समय पर बिक्री के लिए गई थी। मान लें कि n उपलब्ध वस्तुओं की एक सीमित संख्या है; उपभोक्ता द्वारा खरीदे गए उनमें से प्रत्येक की मात्रा माल के एक सेट की विशेषता है
एक्स= (एक्स 1 , एक्स 2 , ..., एक्स एन),
जहां x i उपभोक्ता द्वारा खरीदे गए i-वें माल की मात्रा को दर्शाता है। हम मान लेंगे कि सभी वस्तुओं में मनमानी विभाज्यता का गुण होता है, ताकि उनमें से प्रत्येक की कोई भी गैर-ऋणात्मक मात्रा खरीदी जा सके। तब माल के सभी संभावित सेट माल के स्थान के सदिश हैं C = ( एक्स= (एक्स 1, एक्स 2, ..., एक्स एन)एक्स मैं 0, मैं =)।
रैखिक स्वतंत्रता।
प्रणाली इ 1 , इ 2 , ... , इ m n-विमीय सदिश कहलाते हैं रैखिक रूप से आश्रितअगर ऐसी संख्याएं हैं 1 , 2 , ... , मी , जिनमें से कम से कम एक शून्येतर है, जो समानता को संतुष्ट करता है 1 इ 1 + 2 इ 2+...+λm इएम = 0; अन्यथा, सदिशों की इस प्रणाली को कहा जाता है रैखिक रूप से स्वतंत्रयानी यह समानता तभी संभव है जब सभी ![]() . में वैक्टर की रैखिक निर्भरता का ज्यामितीय अर्थ आर 3, निर्देशित खंडों के रूप में व्याख्या की गई, निम्नलिखित प्रमेयों की व्याख्या करें।
. में वैक्टर की रैखिक निर्भरता का ज्यामितीय अर्थ आर 3, निर्देशित खंडों के रूप में व्याख्या की गई, निम्नलिखित प्रमेयों की व्याख्या करें।
प्रमेय 1. एक एकल वेक्टर से युक्त एक प्रणाली रैखिक रूप से निर्भर होती है यदि और केवल यदि यह वेक्टर शून्य है।
प्रमेय 2। दो सदिशों के रैखिक रूप से आश्रित होने के लिए, यह आवश्यक और पर्याप्त है कि वे संरेख (समानांतर) हों।
प्रमेय 3 . तीन सदिशों के रैखिक रूप से आश्रित होने के लिए, यह आवश्यक और पर्याप्त है कि वे समतलीय हों (एक ही तल में पड़े हों)।
वैक्टर के बाएँ और दाएँ ट्रिपल। गैर समतलीय सदिशों का एक तिहाई ए, बी, सीबुलाया सही, यदि प्रेक्षक अपने उभयनिष्ठ मूल से सदिशों के सिरों को बायपास करता है ए, बी, सीउस क्रम में दक्षिणावर्त आगे बढ़ना प्रतीत होता है। अन्यथा ए, बी, सी -लेफ्ट ट्रिपल. सदिशों के सभी दाएं (या बाएं) त्रिगुण कहलाते हैं समान रूप से उन्मुखी।
आधार और निर्देशांक। तिकड़ी इ 1, इ 2 , इ 3 गैर समतलीय सदिश in आर 3 बुलाया आधार, और स्वयं वैक्टर इ 1, इ 2 , इ 3 - बुनियादी. कोई वेक्टर एआधार वैक्टर के संदर्भ में एक अनोखे तरीके से विस्तारित किया जा सकता है, अर्थात इसे रूप में दर्शाया जा सकता है
ए= एक्स 1 इ 1 + x2 इ 2 + एक्स 3 इ 3, (1.1)
संख्याएँ x 1 , x 2 , x 3 विस्तार में (1.1) कहलाती हैं COORDINATESएआधार पर इ 1, इ 2 , इ 3 और निरूपित हैं ए(एक्स 1, एक्स 2, एक्स 3)।
ऑर्थोनॉर्मल आधार। यदि वैक्टर इ 1, इ 2 , इ 3 जोड़ीवार लंबवत हैं और उनमें से प्रत्येक की लंबाई एक के बराबर है, तो आधार कहलाता है ऑर्थोनॉर्मल, और निर्देशांक x 1 , x 2 , x 3 - आयताकार।एक लम्बवत आधार के आधार सदिशों को निरूपित किया जाएगा मैं, जे, के।
हम मान लेंगे कि अंतरिक्ष में आर 3 कार्टेशियन आयताकार निर्देशांक की सही प्रणाली (0, मैं, जे, के}.
वेक्टर उत्पाद। वेक्टर कला एप्रति वेक्टर बीवेक्टर कहा जाता है सी, जो निम्नलिखित तीन स्थितियों द्वारा निर्धारित किया जाता है:
1. वेक्टर लंबाई सीसंख्यात्मक रूप से वैक्टर पर बने समांतर चतुर्भुज के क्षेत्रफल के बराबर एऔर बी,अर्थात।
सी=
|ए||बी|पाप ( ए^बी).
2. वेक्टर सीप्रत्येक वैक्टर के लंबवत एऔर बी।
3. वैक्टर ए, बीऔर सी, उस क्रम में लिया गया, एक सही ट्रिपल बनाते हैं।
वेक्टर उत्पाद के लिए सीपदनाम पेश किया गया है सी =[अब] या
सी = ए
× बी।
यदि वैक्टर एऔर बीसंरेख हैं, तो sin( ए ^ बी) = 0 और [ अब] = 0, विशेष रूप से, [ आ] = 0. orts के वेक्टर उत्पाद: [ आईजेयू]=क, [जेके] = मैं, [किओ]=जे.
यदि वैक्टर एऔर बीआधार में दिया गया मैं, जे, के COORDINATES ए(ए 1, ए 2, ए 3), बी(बी 1 , बी 2 , बी 3), तब

मिश्रित कार्य। यदि दो सदिशों का क्रॉस उत्पाद एऔर बीअदिश को तीसरे सदिश से गुणा किया जाता है सी,तो तीन सदिशों का ऐसा गुणनफल कहलाता है मिश्रित उत्पादऔर प्रतीक . द्वारा निरूपित किया जाता है ए ई.पू.
यदि वैक्टर ए, बीऔर सीआधार पर मैं, जे, केउनके निर्देशांक द्वारा निर्धारित
ए(ए 1, ए 2, ए 3), बी(बी 1, बी 2, बी 3), सी(सी 1 , सी 2 , सी 3), तब
 .
.
मिश्रित उत्पाद की एक सरल ज्यामितीय व्याख्या होती है - यह एक अदिश राशि होती है, जिसका निरपेक्ष मान तीन दिए गए वैक्टर पर बने समानांतर चतुर्भुज के आयतन के बराबर होता है।
यदि वैक्टर एक सही ट्रिपल बनाते हैं, तो उनका मिश्रित उत्पाद संकेतित मात्रा के बराबर एक सकारात्मक संख्या है; अगर तीन ए, बी, सी -बाएं, फिर ए बी सी<0 и V = - ए बी सी, इसलिए वी =|ए बी सी|.
पहले अध्याय की समस्याओं में सामने आए सदिशों के निर्देशांक सही ऑर्थोनॉर्मल आधार के सापेक्ष दिए गए हैं। इकाई सदिश सदिश की दिशा में ए,प्रतीक द्वारा निरूपित एके विषय में। प्रतीक आर=ओएमबिंदु M के त्रिज्या सदिश द्वारा निरूपित, प्रतीक a, AB या|ए|, | एबी |वैक्टर के मॉड्यूल निरूपित हैं एऔर एबी.
उदाहरण 1.2. वैक्टर के बीच का कोण खोजें ए= 2एम+4एनऔर बी= एम-एन, कहाँ पे एमऔर एन-इकाई वैक्टर और कोण के बीच एमऔर एन 120 ओ के बराबर।
फेसला. हमारे पास है: क्योंकि = अब/एबी, एबी =(2एम+4एन) (एम-एन) = 2एम 2 - 4एन 2 +2एम.एन.=
= 2 - 4+2cos120 o = - 2 + 2(-0.5) = -3; ए = ; ए 2 = (2एम+4एन) (2एम+4एन) =
= 4एम 2 +16एम.एन.+16एन 2 = 4+16(-0.5)+16=12, इसलिए a = . ख = ; बी 2 =
= (एम-एन)(एम-एन) = एम 2 -2एम.एन.+एन 2 =
1-2(-0.5)+1 = 3, इसलिए b = . अंत में हमारे पास है: cos\u003d -1/2, \u003d 120 ओ।
उदाहरण 1.3।जानने वाले वैक्टर अब(-3,-2.6) और ईसा पूर्व(-2,4,4), त्रिभुज ABC की ऊंचाई AD परिकलित करें।
फेसला. त्रिभुज ABC के क्षेत्रफल को S से निरूपित करने पर, हम प्राप्त करते हैं:
एस = 1/2 ई.पू. फिर AD=2S/BC, BC== ![]() = 6,
= 6,
एस = 1/2| एबी ×एसी |.
एसी = एबी + बीसी, तो वेक्टर एसीनिर्देशांक हैं
.
.
उदाहरण 1.4 . दो वैक्टर दिए गए ए(11,10,2) और बी(4,0,3)। इकाई वेक्टर खोजें सी,ओर्थोगोनल से सदिश एऔर बीऔर निर्देशित किया ताकि वैक्टर के ट्रिपल का आदेश दिया जाए ए, बी, सीठीक था।
फेसला।आइए हम सदिश के निर्देशांकों को निरूपित करें सी x, y, z के पदों में दिए गए दायीं ओर्थोनॉर्मल आधार के संबंध में।
जहां तक कि सी ⊥ एसी ⊥बी, तब सीए= 0सीबी= 0. समस्या की स्थिति के अनुसार, यह आवश्यक है कि c = 1 तथा ए बी सी >0.
हमारे पास x,y,z: 11x +10y + 2z = 0, 4x+3z=0, x 2 + y 2 + z 2 = 0 खोजने के लिए समीकरणों की एक प्रणाली है।
सिस्टम के पहले और दूसरे समीकरणों से हमें z = -4/3 x, y = -5/6 x मिलता है। y और z को तीसरे समीकरण में प्रतिस्थापित करने पर, हमारे पास होगा: x 2 = 36/125, जहाँ से
एक्स =±
. शर्त का उपयोग करना ए बी सी> 0, हमें असमानता मिलती है

z और y के व्यंजकों को ध्यान में रखते हुए, हम परिणामी असमानता को इस रूप में फिर से लिखते हैं: 625/6 x > 0, जहां से यह x>0 का अनुसरण करता है। तो x = , y = - , z = - ।
परिभाषा। एक सदिश (गुणक) द्वारा एक सदिश (गुणक) का सदिश गुणनफल, जो इसके साथ संरेख नहीं है, तीसरा सदिश c (उत्पाद) है, जिसका निर्माण इस प्रकार किया गया है:
1) इसका मॉड्यूल संख्यात्मक रूप से है क्षेत्रफल के बराबरअंजीर में समांतर चतुर्भुज। 155), सदिशों पर निर्मित, अर्थात्, यह उल्लिखित समांतर चतुर्भुज के तल के लंबवत दिशा के बराबर है;
3) इस मामले में, वेक्टर सी की दिशा चुनी जाती है (दो संभावित लोगों में से) ताकि वेक्टर सी एक दाएं हाथ की प्रणाली (§ 110) बना सके।
पदनाम: या
परिभाषा के लिए परिशिष्ट। यदि सदिश संरेख हैं, तो आकृति को (सशर्त) समांतर चतुर्भुज मानते हुए, शून्य क्षेत्र निर्दिष्ट करना स्वाभाविक है। तो वेक्टर उत्पाद संरेखीय सदिशशून्य वेक्टर के बराबर माना जाता है।

चूंकि अशक्त वेक्टर को कोई भी दिशा दी जा सकती है, यह सम्मेलन परिभाषा के आइटम 2 और 3 का खंडन नहीं करता है।
टिप्पणी 1. "वेक्टर उत्पाद" शब्द में, पहला शब्द इंगित करता है कि क्रिया का परिणाम एक सदिश है (जैसा कि इसके विपरीत है) डॉट उत्पाद; सीएफ 104, टिप्पणी 1)।
उदाहरण 1. वेक्टर उत्पाद का पता लगाएं जहां सही समन्वय प्रणाली के मुख्य वैक्टर (चित्र। 156)।
1. चूँकि मुख्य सदिशों की लंबाई स्केल इकाई के बराबर होती है, समांतर चतुर्भुज (वर्ग) का क्षेत्रफल संख्यात्मक रूप से एक के बराबर होता है। अतः सदिश गुणनफल का मापांक एक के बराबर होता है।
2. चूँकि समतल का लम्ब अक्ष है, वांछित सदिश उत्पाद सदिश k के समीप एक सदिश संरेख है; और चूंकि दोनों में मापांक 1 है, वांछित क्रॉस उत्पाद या तो k या -k है।
3. इन दो संभावित वैक्टरों में से, पहले को चुना जाना चाहिए, क्योंकि वेक्टर k एक सही प्रणाली बनाते हैं (और वेक्टर एक बाएं बनाते हैं)।
उदाहरण 2. क्रॉस उत्पाद खोजें
फेसला। उदाहरण 1 में, हम यह निष्कर्ष निकालते हैं कि सदिश या तो k या -k है। लेकिन अब हमें -k चुनने की जरूरत है, क्योंकि वैक्टर एक सही प्रणाली बनाते हैं (और वेक्टर एक बाएं बनाते हैं)। इसलिए,
उदाहरण 3. सदिशों की लंबाई क्रमशः 80 और 50 सेमी है, और वे 30° का कोण बनाते हैं। लंबाई की एक इकाई के रूप में मीटर लेते हुए, वेक्टर उत्पाद की लंबाई पाएं a

फेसला। वैक्टर पर बने समांतर चतुर्भुज का क्षेत्रफल बराबर है आवश्यक वेक्टर उत्पाद की लंबाई के बराबर है
उदाहरण 4. एक सेंटीमीटर को लंबाई की एक इकाई के रूप में लेते हुए, समान वैक्टर के क्रॉस उत्पाद की लंबाई पाएं।
फेसला। चूँकि सदिशों पर बने समांतर चतुर्भुज का क्षेत्रफल सदिश गुणनफल की लंबाई के बराबर 2000 सेमी है, अर्थात्।
उदाहरण 3 और 4 की तुलना से पता चलता है कि वेक्टर की लंबाई न केवल कारकों की लंबाई पर निर्भर करती है, बल्कि लंबाई इकाई की पसंद पर भी निर्भर करती है।
भौतिक अर्थवेक्टर उत्पाद।असंख्यों में से भौतिक मात्रा, एक वेक्टर उत्पाद द्वारा दर्शाया गया है, केवल बल के क्षण पर विचार करें।
मान लें कि A बल के अनुप्रयोग का बिंदु है। बिंदु O के सापेक्ष बल का क्षण वेक्टर उत्पाद कहलाता है। चूंकि इस वेक्टर उत्पाद का मॉड्यूल संख्यात्मक रूप से समांतर चतुर्भुज के क्षेत्र के बराबर है (चित्र 157), क्षण का मॉड्यूल ऊंचाई के आधार के गुणनफल के बराबर होता है, अर्थात, बल को बिंदु O से उस सीधी रेखा तक की दूरी से गुणा किया जाता है जिसके साथ बल कार्य करता है।
यांत्रिकी में, यह साबित होता है कि एक कठोर शरीर के संतुलन के लिए, यह आवश्यक है कि न केवल शरीर पर लागू बलों का प्रतिनिधित्व करने वाले वैक्टरों का योग, बल्कि बलों के क्षणों का योग भी शून्य के बराबर होना चाहिए। मामले में जब सभी बल एक ही विमान के समानांतर होते हैं, तो क्षणों का प्रतिनिधित्व करने वाले वैक्टर के जोड़ को उनके मॉड्यूल के जोड़ और घटाव से बदला जा सकता है। लेकिन बलों की मनमानी दिशाओं के लिए, ऐसा प्रतिस्थापन असंभव है। इसके अनुसार, क्रॉस उत्पाद को एक वेक्टर के रूप में परिभाषित किया जाता है, न कि एक संख्या के रूप में।

