Ennen kuin annamme vektoritulon käsitteen, siirrytään kysymykseen vektorien a → , b → , c → järjestetyn kolmikon orientaatiosta kolmiulotteisessa avaruudessa.
Aluksi laitetaan sivuun vektorit a → , b → , c → yhdestä pisteestä. Kolmoiskappaleen a → , b → , c → orientaatio on oikea tai vasen vektorin c → suunnasta riippuen. Suunta, johon lyhin käännös tehdään vektorista a → b → vektorin c → lopusta, määritetään kolmion a → , b → , c → muoto.
Jos lyhin kierto on vastapäivään, niin vektorien a → , b → , c → kolminkertaista kutsutaan oikein jos myötäpäivään - vasemmalle.
Otetaan seuraavaksi kaksi ei-kollineaarista vektoria a → ja b → . Siirretään sitten vektorit A B → = a → ja A C → = b → pisteestä A. Muodostetaan vektori A D → = c → , joka on samanaikaisesti kohtisuorassa sekä A B → että A C → suhteen. Näin ollen, kun rakennamme vektoria A D → = c →, voimme tehdä kaksi asiaa antamalla sille joko yhden suunnan tai päinvastaisen (katso kuva).

Järjestetty vektoreiden trio a → , b → , c → voi, kuten havaitsimme, olla oikea tai vasen vektorin suunnasta riippuen.
Yllä olevasta voimme esitellä vektoritulon määritelmän. Tämä määritelmä annettu kahdelle kohdassa määritellylle vektorille suorakaiteen muotoinen järjestelmä koordinaatit kolmiulotteinen tila.
Määritelmä 1
Kahden vektorin a → ja b → vektoritulo kutsumme tällaista kolmiulotteisen avaruuden suorakulmaisessa koordinaattijärjestelmässä annettua vektoria siten, että:
- jos vektorit a → ja b → ovat kollineaarisia, se on nolla;
- se on kohtisuorassa sekä vektoriin a → että vektoriin b → ts. ∠ a → c → = ∠ b → c → = π 2 ;
- sen pituus määritetään kaavalla: c → = a → b → sin ∠ a → , b → ;
- vektorien tripletillä a → , b → , c → on sama suunta kuin annetulla koordinaatistolla.
vektorituote vektoreilla a → ja b → on seuraava merkintä: a → × b → .
Tuotteen koordinaatit ristiin
Koska millä tahansa vektorilla on tietyt koordinaatit koordinaattijärjestelmässä, on mahdollista ottaa käyttöön toinen ristitulon määritelmä, jonka avulla voit löytää sen koordinaatit vektorien annetuista koordinaateista.
Määritelmä 2
Kolmiulotteisen avaruuden suorakaiteen muotoisessa koordinaattijärjestelmässä kahden vektorin a → = (a x ; a y ; a z) ja b → = (b x ; b y ; b z) vektoritulo kutsutaan vektoria c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → , missä i → , j → , k → ovat koordinaattivektoreita.
Vektorituloa voidaan esittää determinanttina neliömatriisi kolmannen kertaluvun, jossa ensimmäinen rivi on vektorit i → , j → , k → , toinen rivi sisältää vektorin a → koordinaatit ja kolmas rivi vektorin b → koordinaatit tietyssä suorakulmaisessa koordinaatissa järjestelmässä tämä matriisideterminantti näyttää tältä: c → = a → × b → = i → j → k → a x a y a z b x b y b z
Laajentamalla tätä determinanttia ensimmäisen rivin alkioihin, saadaan yhtälö: c → = a → × b → = i → j → k → a x a y a z b x b y b z = a y a z b y b z i → - a x a z b x b z j → + a x a k → = = × b y a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →
Ristikkäisten tuotteiden ominaisuudet
Tiedetään, että vektoritulo koordinaateissa esitetään matriisin determinanttina c → = a → × b → = i → j → k → a x a y a z b x b y b z , sitten kannassa matriisin determinanttien ominaisuudet seuraavat vektorituotteen ominaisuudet:
- antikommutatiivisuus a → × b → = - b → × a → ;
- jakauma a (1) → + a (2) → × b = a (1) → × b → + a (2) → × b → tai a → × b (1) → + b (2) → = a → × b (1) → + a → × b (2) → ;
- assosiatiivisuus λ a → × b → = λ a → × b → tai a → × (λ b →) = λ a → × b → , missä λ on mielivaltainen reaaliluku.
Näillä ominaisuuksilla ei ole monimutkaisia todisteita.
Voimme esimerkiksi todistaa vektorituotteen.
Todiste antikommutatiivisuudesta
Määritelmän mukaan a → × b → = i → j → k → a x a y a z b x b y b z ja b → × a → = i → j → k → b x b y b z a x a y a z . Ja jos kaksi matriisin riviä vaihdetaan, niin matriisin determinantin arvon tulisi muuttua päinvastaiseksi, joten a → × b → = i → j → k → a x a y a z b x b y b z = - i → j → k → b x b y b z a x a y a z = - b → × a → , joka ja todistaa vektoritulon antikommutatiivisuuden.
Vektorituote – esimerkkejä ja ratkaisuja
Useimmissa tapauksissa on kolmenlaisia tehtäviä.
Ensimmäisen tyypin tehtävissä on yleensä annettu kahden vektorin pituudet ja niiden välinen kulma, mutta sinun on löydettävä ristitulon pituus. Käytä tässä tapauksessa seuraavaa kaavaa c → = a → b → sin ∠ a → , b → .
Esimerkki 1
Laske vektorien a → ja b → ristitulon pituus, jos tunnetaan a → = 3 , b → = 5 , ∠ a → , b → = π 4.
Ratkaisu
Ratkaisemme vektorien a → ja b → vektoritulon pituuden määritelmän avulla tämä tehtävä: a → × b → = a → b → sin ∠ a → , b → = 3 5 sin π 4 = 15 2 2 .
Vastaus: 15 2 2 .
Toisen tyypin tehtävillä on yhteys vektorien koordinaatteihin, ne sisältävät vektoritulon, sen pituuden jne. etsinyt läpi tunnetut koordinaatit annetut vektorit a → = (a x ; a y ; a z) ja b → = (b x ; b y ; b z) .
Tämän tyyppisissä tehtävissä voit ratkaista monia vaihtoehtoja tehtäville. Ei esimerkiksi vektorien a → ja b → koordinaatteja, vaan niiden laajennuksia koordinaattivektorit ystävällinen b → = b x i → + b y j → + b z k → ja c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → , tai vektorit a → ja b → voidaan antaa niiden koordinaateista. aloitus- ja loppupisteet.
Harkitse seuraavia esimerkkejä.
Esimerkki 2
Kaksi vektoria asetetaan suorakaiteen muotoiseen koordinaattijärjestelmään a → = (2 ; 1 ; - 3) , b → = (0 ; - 1 ; 1) . Etsi heidän vektoritulonsa.
Ratkaisu
Toisen määritelmän mukaan löydämme kahden vektorin vektoritulon annetut koordinaatit: a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → = = (1 1 - (- 3) (- 1)) i → + (( - 3) 0 - 2 1) j → + (2 (- 1) - 1 0) k → = = - 2 i → - 2 j → - 2 k → .
Jos kirjoitamme ristitulon matriisideterminantin suhteen, niin ratkaisu tämä esimerkki näyttää tältä: a → × b → = i → j → k → a x a y a z b x b y b z = i → j → k → 2 1 - 3 0 - 1 1 = - 2 i → - 2 j → - 2 k → .
Vastaus: a → × b → = - 2 i → - 2 j → - 2 k → .
Esimerkki 3
Laske vektorien i → - j → ja i → + j → + k → ristitulon pituus, missä suorakulmaisen karteesisen koordinaatiston i → , j → , k → - orts.
Ratkaisu
Etsitään ensin annetun vektoritulon i → - j → × i → + j → + k → koordinaatit annetusta suorakaiteen muotoisesta koordinaatistosta.
On tunnettua, että vektoreilla i → - j → ja i → + j → + k → on koordinaatit (1 ; - 1 ; 0) ja (1 ; 1 ; 1) vastaavasti. Laske vektoritulon pituus matriisideterminantilla, jolloin meillä on i → - j → × i → + j → + k → = i → j → k → 1 - 1 0 1 1 1 = - i → - j → + 2 k → .
Siksi vektoritulolla i → - j → × i → + j → + k → on koordinaatit (- 1 ; - 1 ; 2) annetussa koordinaattijärjestelmässä.
Löydämme vektoritulon pituuden kaavalla (katso luku vektorin pituuden löytämisestä): i → - j → × i → + j → + k → = - 1 2 + - 1 2 + 2 2 = 6.
Vastaus: i → - j → × i → + j → + k → = 6 . .
Esimerkki 4
Suorakaiteen muotoisena Karteesinen järjestelmä koordinaatit ovat kolmen pisteen A (1 , 0 , 1) , B (0 , 2 , 3) , C (1 , 4 , 2) koordinaatit. Etsi jokin vektori, joka on kohtisuorassa kohtiin A B → ja A C → samanaikaisesti.
Ratkaisu
Vektoreilla A B → ja A C → on seuraavat koordinaatit (- 1 ; 2 ; 2) ja (0 ; 4 ; 1) vastaavasti. Kun vektorien A B → ja A C → vektoritulo on löydetty, on selvää, että se on määritelmän mukaan kohtisuora vektori sekä A B → että A C → suhteen, eli se on ratkaisu ongelmaamme. Etsi se A B → × A C → = i → j → k → - 1 2 2 0 4 1 = - 6 i → + j → - 4 k → .
Vastaus: - 6 i → + j → - 4 k → . on yksi kohtisuorassa olevista vektoreista.
Kolmannen tyypin ongelmat keskittyvät vektorien vektoritulon ominaisuuksien käyttöön. Sen soveltamisen jälkeen saamme ratkaisun annettuun ongelmaan.
Esimerkki 5
Vektorit a → ja b → ovat kohtisuorassa ja niiden pituus on 3 ja 4. Laske ristitulon pituus 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b → .
Ratkaisu
Vektoritulon distributiivisuusominaisuuden perusteella voidaan kirjoittaa 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b →
Assosiatiivisuuden ominaisuudella otamme pois numeeriset kertoimet vektoritulojen etumerkin ulkopuolella viimeisessä lausekkeessa: 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b → = = 3 a → × a → + 3 (- 2) a → × b → + (- 1) b → × a → + (- 1) (- 2) b → × b → = = 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b →
Vektoritulot a → × a → ja b → × b → ovat yhtä kuin 0, koska a → × a → = a → a → sin 0 = 0 ja b → × b → = b → b → sin 0 = 0 , sitten 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b → = - 6 a → × b → - b → × a → . .
Vektoritulon antikommutatiivisuudesta seuraa - 6 a → × b → - b → × a → = - 6 a → × b → - (- 1) a → × b → = - 5 a → × b → . .
Vektoritulon ominaisuuksia käyttämällä saadaan yhtälö 3 · a → - b → × a → - 2 · b → = = - 5 · a → × b → .
Ehdolla vektorit a → ja b → ovat kohtisuorassa, eli niiden välinen kulma on yhtä suuri kuin π 2 . Nyt jää vain korvata löydetyt arvot vastaaviin kaavoihin: 3 a → - b → × a → - 2 b → = - 5 a → × b → = = 5 a → × b → = 5 a → b → sin (a →, b →) = 5 3 4 sin π 2 = 60.
Vastaus: 3 a → - b → × a → - 2 b → = 60 .
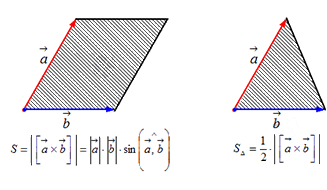
Vektorien ristitulon pituus määritelmän mukaan on a → × b → = a → · b → · sin ∠ a → , b → . Koska se on jo tiedossa (alkaen koulun kurssi), että kolmion pinta-ala on puolet sen kahden sivun pituuksien tulosta kerrottuna annettujen sivujen välisen kulman sinillä. Siksi vektoritulon pituus on yhtä suuri kuin suunnikkaan pinta-ala - kaksinkertainen kolmio, nimittäin sivujen tulo vektorien a → ja b → muodossa, jotka on irrotettu yhdestä pisteestä sinin avulla niiden välisestä kulmasta sin ∠ a → , b → .
Sitä se on geometrinen merkitys vektorituote.
Vektoritulon fyysinen merkitys
Mekaniikassa, yhdessä fysiikan haaroista, vektorituotteen ansiosta voit määrittää voimamomentin suhteessa avaruuspisteeseen.
Määritelmä 3
Pisteeseen B kohdistetun voiman F → alaisena suhteessa pisteeseen A ymmärrämme seuraavan vektoritulon A B → × F → .
Jos huomaat tekstissä virheen, korosta se ja paina Ctrl+Enter
7.1. Ristituotteen määritelmä
Kolme ei-koplanaarista vektoria a , b ja c annetussa järjestyksessä muodostavat oikean kolmion, jos kolmannen vektorin c lopusta lyhin käännös ensimmäisestä vektorista a toiseen vektoriin b nähdään vastapäivään, ja vasen, jos myötäpäivään (katso kuva 16).
Vektorien a ja b vektorituloa kutsutaan vektoriksi c, joka:
1. Kohtisuorassa vektoreihin a ja b, eli c ^ a ja c ^ b;
2. Sen pituus on numeerisesti yhtä suuri kuin vektoreihin a ja rakennetun suunnikkaan pinta-alab kuten sivuilla (ks. kuva 17), ts.
3. Vektorit a , b ja c muodostavat oikeanpuoleisen kolmion.


Vektorituloa merkitään a x b tai [a,b]. Vektoritulon määritelmästä seuraavat suoraan seuraamani orttien väliset suhteet, j ja k(katso kuva 18):
i x j \u003d k, j x k \u003d i, k x i \u003d j.
Todistakaamme se esimerkiksi i xj \u003d k.
1) k ^ i , k ^ j;
2) |k |=1, mutta | i x j| = |i | |J| sin(90°)=1;
3) vektorit i , j ja k muodostavat oikeanpuoleisen kolmion (katso kuva 16).
7.2. Ristikkäisten tuotteiden ominaisuudet
1. Kun tekijät järjestetään uudelleen, vektoritulo vaihtaa etumerkkiä, ts. ja xb \u003d (b xa) (katso kuva 19).
Vektorit a xb ja b xa ovat kollineaarisia, niillä on samat moduulit (suunnikaspinta-ala pysyy muuttumattomana), mutta ovat vastakkaisiin suuntautuneita (vastakkaisen suuntaiset kolmiot a, b ja xb sekä a, b, b x a). Tuo on axb = -(bxa).
2. Vektoritulolla on assosiatiivista omaisuutta skalaaritekijän suhteen, eli l (a xb) \u003d (la) x b \u003d a x (l b).

Olkoon l >0. Vektori l (a xb) on kohtisuorassa vektoreihin a ja b nähden. Vektori ( l a) x b on myös kohtisuorassa vektoreihin a ja b(vektorit a, l mutta makaa samassa tasossa). Siis vektorit l(a xb) ja ( l a) x b kollineaarinen. On selvää, että heidän suunnansa ovat samat. Niillä on sama pituus:
Siksi l(a xb)= l a xb. Se on todistettu samalla tavalla l<0.
3. Kaksi nollasta poikkeavaa vektoria a ja b ovat kollineaarisia silloin ja vain, jos niiden vektoritulo on yhtä suuri kuin nollavektori, eli ja ||b<=>ja xb \u003d 0.

Erityisesti i*i=j*j=k*k=0.
4. Vektoritulolla on jakautumisominaisuus:
(a+b) xs = a xs + b xs .
Hyväksy ilman todisteita.
7.3. Ristituotteen ilmaisu koordinaattien muodossa
Käytämme vektoriristitulotaulukkoa i , j ja k:

jos lyhimmän polun suunta ensimmäisestä vektorista toiseen on sama kuin nuolen suunta, niin tulo on yhtä suuri kuin kolmas vektori, jos se ei täsmää, otetaan kolmas vektori miinusmerkillä.
Olkoon kaksi vektoria a =a x i +a y j+az k ja b = bx i+tekijä j+bz k. Etsitään näiden vektorien vektoritulo kertomalla ne polynomeina (vektoritulon ominaisuuksien mukaan):

![]()
Tuloksena oleva kaava voidaan kirjoittaa vielä lyhyemmäksi:

koska yhtälön (7.1) oikea puoli vastaa kolmannen kertaluvun determinantin laajennusta ensimmäisen rivin elementtien suhteen.Yhtälö (7.2) on helppo muistaa.
7.4 Jotkut ristiintuotteen sovellukset
Vektorien kollineaarisuuden määrittäminen

Suunnikkaan ja kolmion alueen löytäminen
Vektorien ristitulon määritelmän mukaan a ja b |a xb | =| a | * |b |sin g , eli S par = |a x b |. Ja siksi D S \u003d 1/2 | a x b |.
Voiman momentin määrittäminen pisteen ympärillä
Kohdistetaan voima pisteeseen A F = AB Anna olla O- jokin piste avaruudessa (katso kuva 20).

Se tiedetään fysiikasta vääntömomentti F suhteessa pisteeseen O kutsutaan vektoriksi M , joka kulkee pisteen läpi O ja:
1) kohtisuorassa pisteiden läpi kulkevaan tasoon nähden O, A, B;
2) numeerisesti yhtä suuri kuin voiman ja olkapään tulo
3) muodostaa oikean kolmion vektoreilla OA ja A B .
Siksi M \u003d OA x F.
Lineaarisen pyörimisnopeuden löytäminen
Nopeus v pisteet M kiinteä runko, pyörii kulmanopeudella w kiinteän akselin ympärillä, määritetään Eulerin kaavalla v \u003d w x r, missä r \u003d OM, missä O on jokin akselin kiinteä piste (katso kuva 21).

Yksikkövektori- Tämä on vektori, jonka itseisarvo (moduuli) on yhtä suuri kuin yksi. Yksikkövektorin merkitsemiseen käytetään alaindeksiä e. Eli jos vektori on annettu a, silloin sen yksikkövektori on vektori a e. Tämä yksikkövektori osoittaa samaan suuntaan kuin itse vektori a, ja sen moduuli on yhtä suuri kuin yksi, eli a e \u003d 1.
Ilmeisesti a= a a e (a - vektorin moduuli a). Tämä seuraa säännöstä, jolla suoritetaan skalaarin kertominen vektorilla.
Yksikkövektorit liittyy usein koordinaattijärjestelmän koordinaattiakseleihin (erityisesti karteesisen koordinaattijärjestelmän akseleihin). Ohjeet näihin vektorit yhtenevät vastaavien akselien suuntien kanssa, ja niiden origot yhdistetään usein koordinaattijärjestelmän origon kanssa.
Haluan muistuttaa sinua siitä Suorakulmainen koordinaattijärjestelmä avaruudessa kutsutaan perinteisesti kolmiosaa keskenään kohtisuorassa olevista akseleista, jotka leikkaavat pisteessä, jota kutsutaan origoksi. Koordinaattiakseleita merkitään yleensä kirjaimilla X, Y, Z ja niitä kutsutaan vastaavasti abskissa-akseliksi, ordinaatta-akseliksi ja aplikaatioakseliksi. Descartes itse käytti vain yhtä akselia, jolle abskissat piirrettiin. käytön ansiota järjestelmät kirveet kuuluvat hänen oppilailleen. Siksi lause Suorakulmainen koordinaattijärjestelmä historiallisesti väärin. Parempi puhua suorakulmainen koordinaattijärjestelmä tai ortogonaalinen koordinaattijärjestelmä. Emme kuitenkaan muuta perinteitä ja oletamme jatkossa, että karteesinen ja suorakulmainen (ortogonaalinen) koordinaattijärjestelmä ovat yksi ja sama.
Yksikkövektori, joka on suunnattu X-akselia pitkin, on merkitty i, yksikkövektori, joka on suunnattu pitkin Y-akselia, on merkitty j, a yksikkövektori, joka on suunnattu Z-akselia pitkin, on merkitty k. Vektorit i, j, k nimeltään orts(Kuva 12, vasen), niissä on yksittäisiä moduuleja, eli
i = 1, j = 1, k = 1.
akselit ja orts suorakaiteen muotoinen koordinaattijärjestelmä joissakin tapauksissa niillä on muita nimiä ja nimityksiä. Joten abskissa-akselia X voidaan kutsua tangenttiakseliksi ja sen yksikkövektoria merkitään τ (Kreikka pieni kirjain tau), y-akseli on normaaliakseli, sen yksikkövektori on merkitty n, sovellusakseli on binormaalin akseli, sen yksikkövektori on merkitty b. Miksi muuttaa nimiä, jos olemus pysyy samana?
Tosiasia on, että esimerkiksi mekaniikassa kappaleiden liikettä tutkittaessa käytetään hyvin usein suorakaiteen muotoista koordinaattijärjestelmää. Joten jos koordinaattijärjestelmä itsessään on liikkumaton ja liikkuvan kohteen koordinaattien muutosta seurataan tässä liikkumattomassa järjestelmässä, niin yleensä akselit merkitsevät X, Y, Z ja niiden orts vastaavasti i, j, k.
Mutta usein, kun esine liikkuu jonkinlaista kaarevaa liikerataa pitkin (esimerkiksi ympyrää pitkin), on kätevämpää tarkastella mekaanisia prosesseja koordinaattijärjestelmässä, joka liikkuu tämän kohteen kanssa. Juuri tällaisessa liikkuvassa koordinaattijärjestelmässä käytetään muita akseleiden nimiä ja niiden yksikkövektoreita. Se on vain hyväksytty. Tässä tapauksessa X-akseli on suunnattu tangentiaalisesti lentoradalle kohdassa, jossa tämä kohde tällä hetkellä sijaitsee. Ja sitten tätä akselia ei enää kutsuta X-akseliksi, vaan tangenttiakseliksi, eikä sen yksikkövektoria enää merkitä i, a τ . Y-akseli on suunnattu liikeradan kaarevuussädettä pitkin (ympyrässä liikkuessa - ympyrän keskustaan). Ja koska säde on kohtisuorassa tangenttia vastaan, akselia kutsutaan normaalin akseliksi (pystysuora ja normaali ovat sama asia). Tämän akselin suuntaa ei enää ole merkitty j, a n. Kolmas akseli (entinen Z) on kohtisuorassa kahteen edelliseen nähden. Tämä on binormaali vektorin kanssa b(Kuva 12, oikea). Muuten, tässä tapauksessa suorakaiteen muotoinen koordinaattijärjestelmä kutsutaan usein "luonnolliseksi" tai luonnolliseksi.
Määritelmä Reaalilukujen järjestettyä kokoelmaa (x 1 , x 2 , ... , x n) n kutsutaan n-ulotteinen vektori, ja luvut x i (i = ) - komponentit tai koordinaatit,
Esimerkki. Jos esimerkiksi tietyn autotehtaan on valmistettava vuoroa kohden 50 autoa, 100 kuorma-autoa, 10 linja-autoa, 50 sarjaa varaosia henkilöautoihin ja 150 sarjaa kuorma-autoihin ja linja-autoihin, niin tämän tehtaan tuotantoohjelma voidaan kirjoittaa esim. vektori (50, 100 , 10, 50, 150), jossa on viisi komponenttia.
Merkintä. Vektorit on merkitty lihavoituilla pienillä kirjaimilla tai kirjaimilla, joiden yläosassa on palkki tai nuoli, esim. a tai. Näitä kahta vektoria kutsutaan yhtä suuri jos niissä on sama määrä komponentteja ja niitä vastaavat komponentit ovat yhtä suuret.
Vektorikomponentteja ei voi vaihtaa keskenään, esim. (3, 2, 5, 0, 1) ja (2, 3, 5, 0, 1) eri vektoreita.
Operaatiot vektoreille. työ
x= (x 1 , x 2 , ... ,x n) reaaliluvuksiλ kutsutaan vektoriksiλ x= (λx1, λx2, ..., λxn).
summax= (x 1 , x 2 , ... ,x n) ja y= (y 1 , y 2 , ... ,y n) kutsutaan vektoriksi x+y= (x 1 + y 1, x 2 + y 2, ... , x n + + y n).
Vektorien avaruus. N -dimensiaalinen vektoriavaruus R n määritellään joukoksi kaikkia n-ulotteisia vektoreita, joille on määritelty reaalilukujen kertominen ja yhteenlasku.
Taloudellinen kuva. Taloudellinen esimerkki n-ulotteisesta vektoriavaruudesta: tavaroiden tilaa (tavaroita). Alla hyödyke ymmärrämme jotakin tuotetta tai palvelua, joka tuli myyntiin tiettyyn aikaan tietyssä paikassa. Oletetaan, että käytettävissä on äärellinen määrä tavaroita n; kunkin kuluttajan ostamille määrille on ominaista tavaroiden joukko
x= (x 1 , x 2 , ..., x n),
missä x i tarkoittaa kuluttajan ostaman i:nnen tavaran määrää. Oletetaan, että kaikilla tavaroilla on mielivaltainen jaettavissa oleva ominaisuus, joten jokainen niistä voidaan ostaa mikä tahansa ei-negatiivinen määrä. Tällöin kaikki mahdolliset tavarajoukot ovat hyödykeavaruuden vektoreita C = ( x= (x 1 , x 2 , ... , x n) x i ≥ 0, i = ).
Lineaarinen riippumattomuus.
Järjestelmä e 1 , e 2 , ... , e m n-ulotteista vektoria kutsutaan lineaarisesti riippuvainen jos sellaisia lukuja onλ 1 , λ 2 , ... , λ m , josta vähintään yksi on nollasta poikkeava, mikä täyttää yhtälönλ1 e 1 + λ2 e 2+...+λm e m = 0; muuten tätä vektorijärjestelmää kutsutaan lineaarisesti riippumaton, eli tämä tasa-arvo on mahdollista vain siinä tapauksessa, että kaikki ![]() . Vektorien lineaarisen riippuvuuden geometrinen merkitys in R 3, tulkittu suunnatuiksi segmenteiksi, selittää seuraavat lauseet.
. Vektorien lineaarisen riippuvuuden geometrinen merkitys in R 3, tulkittu suunnatuiksi segmenteiksi, selittää seuraavat lauseet.
Lause 1. Yhdestä vektorista koostuva järjestelmä on lineaarisesti riippuvainen silloin ja vain jos tämä vektori on nolla.
Lause 2. Jotta kaksi vektoria olisivat lineaarisesti riippuvaisia, on välttämätöntä ja riittävää, että ne ovat kollineaarisia (rinnakkaisia).
Lause 3 . Jotta kolme vektoria olisivat lineaarisesti riippuvaisia, on välttämätöntä ja riittävää, että ne ovat samassa tasossa (samassa tasossa).
Vasen ja oikea vektorin kolmiot. Kolmiosa ei-samantasoisia vektoreita a, b, c nimeltään oikein, jos havaitsija niiden yhteisestä alkuperästä ohittaa vektorien päät a, b, c tässä järjestyksessä näyttää etenevän myötäpäivään. Muuten a, b, c -vasen kolmikko. Kaikkia oikeanpuoleisia (tai vasenta) vektoreita kutsutaan yhtä suuntautunut.
Pohja ja koordinaatit. Troikka e 1, e 2 , e 3 ei-koplanaarista vektoria sisään R 3 soitti perusta, ja itse vektorit e 1, e 2 , e 3 - perus. Mikä tahansa vektori a voidaan laajentaa ainutlaatuisella tavalla kantavektoreiden suhteen, eli se voidaan esittää muodossa
a= x 1 e 1 + x 2 e 2 + x 3 e 3, (1.1)
luvut x 1 , x 2 , x 3 laajennuksessa (1.1) kutsutaan koordinaatita pohjalta e 1, e 2 , e 3 ja on merkitty a(x 1, x 2, x 3).
Ortonormaali perusta. Jos vektorit e 1, e 2 , e 3 ovat pareittain kohtisuorat ja kunkin pituus on yksi, niin kantaa kutsutaan ortonormaali, ja koordinaatit x 1 , x 2 , x 3 - suorakulmainen. Ortonormaalin kannan kantavektorit merkitään i, j, k.
Oletamme sen avaruudessa R 3 oikea suorakulmaisten suorakulmaisten koordinaattien järjestelmä (0, i, j, k}.
Vector tuote. vektori taidetta a vektoria kohti b kutsutaan vektoriksi c, joka määritetään seuraavilla kolmella ehdolla:
1. Vektorin pituus c numeerisesti yhtä suuri kuin vektoreihin rakennetun suunnikkaan pinta-ala a ja b, eli
c=
|a||b| synti( a^b).
2. Vektori c kohtisuorassa jokaiseen vektoriin nähden a ja b.
3. Vektorit a, b ja c, tässä järjestyksessä, muodostavat oikean kolmoiskappaleen.
Vektorituotteelle c nimitys otetaan käyttöön c=[ab] tai
c = a
× b.
Jos vektorit a ja b ovat kollineaarisia, sitten syn( a^b) = 0 ja [ ab] = 0, erityisesti [ aa] = 0. Orttien vektoritulot: [ ij]=k, [jk] = i, [ki]=j.
Jos vektorit a ja b perusteessa annettu i, j, k koordinaatit a(a 1, a 2, a 3), b(b1, b2, b3), sitten

Sekatyötä. Jos kahden vektorin ristitulo a ja b skalaari kerrottuna kolmannella vektorilla c, silloin tällaista kolmen vektorin tuloa kutsutaan sekoitettu tuote ja se on merkitty symbolilla a eKr.
Jos vektorit a, b ja c pohjalta i, j, k asetettu niiden koordinaattien mukaan
a(a 1, a 2, a 3), b(b 1 , b 2 , b 3), c(c1, c2, c3), sitten
 .
.
Sekoitustulolla on yksinkertainen geometrinen tulkinta - se on skalaari, jonka absoluuttinen arvo on sama kuin kolmelle annetulle vektorille rakennetun suuntaissärmiön tilavuus.
Jos vektorit muodostavat oikean kolmion, niin niiden sekoitettu tulo on positiivinen luku, joka on yhtä suuri kuin ilmoitettu tilavuus; jos kolme a, b, c - vasemmalle siis a b c<0 и V = - a b c, joten V =|a b c|.
Ensimmäisen luvun ongelmissa havaittujen vektorien koordinaatit oletetaan annetuiksi suhteessa oikeaan ortonormaalikantaan. Yksikkövektori, joka on samansuuntainen vektorin kanssa a, merkitty symbolilla a noin. Symboli r=OM merkitty pisteen M sädevektorilla, symboleilla a, AB tai|a|, | AB |vektoreiden moduulit on merkitty a ja AB.
Esimerkki 1.2. Etsi vektorien välinen kulma a= 2m+4n ja b= m-n, missä m ja n- yksikkövektorit ja niiden välinen kulma m ja n yhtä suuri kuin 120 o.
Ratkaisu. Meillä on: cos φ = ab/ab, ab=(2m+4n) (m-n) = 2m 2 - 4n 2 +2mn=
= 2 - 4+2cos120 o = -2 + 2 (-0,5) = -3; a = ; a 2 = (2m+4n) (2m+4n) =
= 4m 2 +16mn+16n 2 = 4+16(-0,5)+16=12, joten a = . b= ; b 2 =
= (m-n)(m-n) = m 2 -2mn+n 2 =
1-2(-0,5)+1 = 3, joten b = . Lopuksi meillä on: cosφ \u003d -1/2, φ \u003d 120 o.
Esimerkki 1.3.Vektorien tunteminen AB(-3,-2,6) ja eKr(-2,4,4), laske kolmion ABC korkeus AD.
Ratkaisu. Merkitsemällä kolmion ABC aluetta S:llä, saamme:
S = 1/2 eKr. jKr. Sitten AD=2S/BC, BC== ![]() = 6,
= 6,
S = 1/2| AB ×AC|.
AC=AB+BC, joten vektori AC on koordinaatit
.
.
Esimerkki 1.4 . Annettu kaksi vektoria a(11,10,2) ja b(4,0,3). Etsi yksikkövektori c, kohtisuorassa vektoreihin nähden a ja b ja suunnattu siten, että vektoreiden tilattu kolmikko a, b, c oli oikeassa.
Ratkaisu.Merkitään vektorin koordinaatit c suhteessa annettuun oikeaan ortonormaaliseen kantaan x:n, y:n, z:n suhteen.
Koska c ⊥ a, c ⊥b, sitten noin= 0, cb= 0. Tehtävän ehdon mukaan c = 1 ja a b c >0.
Meillä on yhtälöjärjestelmä x,y,z:n löytämiseksi: 11x +10y + 2z = 0, 4x+3z=0, x 2 + y 2 + z 2 = 0.
Järjestelmän ensimmäisestä ja toisesta yhtälöstä saadaan z = -4/3 x, y = -5/6 x. Korvaamalla y ja z kolmanteen yhtälöön, saamme: x 2 = 36/125, mistä
x=±
. Käyttöehto a b c > 0, saamme epätasa-arvon

Ottaen huomioon z:n ja y:n lausekkeet, kirjoitetaan saatu epäyhtälö muotoon: 625/6 x > 0, josta seuraa, että x>0. Joten x =, y = -, z = -.
Määritelmä. Vektorin a (kertoimen) vektoritulo vektorilla (kertoimella), joka ei ole kollineaarinen sen kanssa, on kolmas vektori c (tulo), joka rakennetaan seuraavasti:
1) sen moduuli on numeerinen yhtä suuri kuin pinta-ala suunnikas kuvassa. 155), rakennettu vektoreille, eli se on yhtä suuri kuin suunta, joka on kohtisuorassa mainitun suunnikkaan tasoon nähden;
3) tässä tapauksessa vektorin c suunta valitaan (kahdesta mahdollisesta) siten, että vektorit c muodostavat oikeakätisen järjestelmän (110 §).
Nimitys: tai
Lisäys määritelmään. Jos vektorit ovat kollineaarisia, niin kuvaa (ehdollisesti) suunnikkaana ajatellen on luonnollista määrittää nolla-alue. Joten vektoritulo kollineaariset vektorit katsotaan yhtäläiseksi nollavektorin kanssa.

Koska nollavektorille voidaan osoittaa mikä tahansa suunta, tämä sopimus ei ole ristiriidassa määritelmän kohtien 2 ja 3 kanssa.
Huomautus 1. Termissä "vektoritulo" ensimmäinen sana osoittaa, että toiminnan tulos on vektori (toisin kuin pistetuote; vrt. § 104, huomautus 1).
Esimerkki 1. Etsi vektoritulo, jossa oikean koordinaatiston päävektorit (kuva 156).
1. Koska päävektorien pituudet ovat yhtä suuria kuin asteikkoyksikkö, suunnikkaan (neliön) pinta-ala on numeerisesti yhtä suuri kuin yksi. Siten vektoritulon moduuli on yhtä suuri kuin yksi.
2. Koska kohtisuora tasoon nähden on akseli, haluttu vektoritulo on vektorin k kanssa kollineaarinen vektori; ja koska molemmilla on moduuli 1, vaadittu ristitulo on joko k tai -k.
3. Näistä kahdesta mahdollisesta vektorista on valittava ensimmäinen, koska vektorit k muodostavat oikeanpuoleisen järjestelmän (ja vektorit vasemman).
Esimerkki 2. Etsi ristitulo
Ratkaisu. Kuten esimerkissä 1, päättelemme, että vektori on joko k tai -k. Mutta nyt meidän on valittava -k, koska vektorit muodostavat oikean järjestelmän (ja vektorit muodostavat vasemman). Niin,
Esimerkki 3 Vektorien pituus on 80 cm ja 50 cm, ja ne muodostavat 30° kulman. Kun otetaan metri pituusyksikkönä, lasketaan vektoritulon a pituus

Ratkaisu. Vektoreihin rakennetun suunnikkaan pinta-ala on yhtä suuri kuin Vaaditun vektoritulon pituus on yhtä suuri
Esimerkki 4. Etsi samojen vektorien ristitulon pituus ottamalla pituusyksiköksi senttimetri.
Ratkaisu. Koska vektoreille rakennetun suunnikkaan pinta-ala on yhtä suuri kuin vektoritulon pituus, on 2000 cm, ts.
Esimerkkien 3 ja 4 vertailu osoittaa, että vektorin pituus ei riipu pelkästään tekijöiden pituuksista, vaan myös pituusyksikön valinnasta.
fyysinen merkitys vektorituote. Lukuisista fyysisiä määriä, jota edustaa vektoritulo, ota huomioon vain voimamomentti.
Olkoon A voiman kohdistamispiste. Voiman momenttia suhteessa pisteeseen O kutsutaan vektorituloksi. Koska tämän vektoritulon moduuli on numeerisesti yhtä suuri kuin suunnikkaan pinta-ala (kuva 157), momentin moduuli on yhtä suuri kuin kannan tulo korkeudella, eli voima kerrottuna etäisyydellä pisteestä O siihen suoraan, jota pitkin voima vaikuttaa.
Mekaniikassa on todistettu, että jäykän kappaleen tasapainoa varten on välttämätöntä, että kehoon kohdistuvia voimia edustavien vektorien summan lisäksi myös voimien momenttien summa on nolla. Siinä tapauksessa, että kaikki voimat ovat samansuuntaisia saman tason kanssa, momentteja edustavien vektorien yhteenlasku voidaan korvata niiden moduulien yhteen- ja vähennyksellä. Mutta mielivaltaisilla voimien suunnalla tällainen korvaaminen on mahdotonta. Tämän mukaisesti ristitulo määritellään täsmälleen vektoriksi, ei numeroksi.

