Გვერდი 1
დაბალი ძაბვის წრეში რხევის პროცესი ჩერდება უკვე მაღალი სიხშირის რხევების პირველ პერიოდში, რადგან ამ რხევების პერიოდის მეორე ნახევარში დენის მიმართულება ხდება დენის დენის საპირისპირო დენის წრეში. გენერატორში ნაპერწკლის სიკაშკაშის გასაზრდელად შესაძლებელია ტევადობის შემდგომი გაზრდა.
ოსცილატორული პროცესები მოიცავს ფენომენების ფართო სპექტრს, რომლებიც ხასიათდება მათი მახასიათებლების განმეორებით. გარკვეული ინტერვალებითდრო.
რხევითი პროცესი ხდება სისტემაში, როდესაც ძალასთან ერთად, რომელიც მას წონასწორობიდან გამოჰყავს, არსებობს აღმდგენი (დაბრუნების) ძალაც. რა მოხდება, თუ აღმდგენი ძალა იმოქმედებს სისტემაზე მუდმივი შეფერხებით. უფრო მეტიც, თუ ასეთი არასტაბილურობა, რომელიც დაკავშირებულია დაგვიანების ეფექტებთან, საზიანოა გემის სტაბილიზაციის მექანიზმებისთვის, მაშინ ის სასარგებლოა ელექტრონული გენერატორების შემუშავებაში.
რხევითი პროცესები, რომლებიც განსაზღვრავენ ღეროებზე დინამიური დატვირთვების სიდიდეს, არსებითად განსაზღვრავენ გაპრიალებულ ღეროსთან დაფიქსირებული დინამოგრამების ფორმას.
წრედში რხევითი პროცესი ხდება არანულოვანი საწყისი პირობებით. საწყისი დენი ინდუქციურ x-ში განისაზღვრება შემდეგი მოსაზრებებიდან. B გადამრთველი არღვევს წრეს, როდესაც დენი tB - i0 - ic გადის ნულზე.
| მარტივი გარდამავალი - [ IMAGE ] დენის გარდამავალი ცვლილება წრედში და ძაბვა კონდენსატორზე, როდესაც წრე უკავშირდება მას. |
რხევითი პროცესები ასევე შეიძლება მოხდეს ელექტრულ მანქანებში და სხვა ელექტრულ დანადგარებში მნიშვნელოვანი ინდუქციურობით და მბრუნავი მასებით, ჩართვის, გამორთვისა და ჩართვისას. მკვეთრი ცვლილებებისამუშაო რეჟიმი. გარკვეულ პირობებში, ჩნდება არა დატენიანებული, მაგრამ მოძრავი რხევები. ასეთმა რყევებმა შეიძლება გამოიწვიოს სერიოზული დარღვევებიელექტრული დანადგარების ექსპლუატაცია და ავარიების მიზეზიც კი. ამიტომ, ელექტრული მანქანებისა და სხვა დანადგარების მართვის სისტემების შემუშავებისას, ზოგიერთ შემთხვევაში აუცილებელია სპეციალური ზომების გამოყენება რხევითი პროცესების უსწრაფესი შესუსტებისთვის (მათ სქემებში წინააღმდეგობების შეყვანა და ა.შ.).
რხევითი პროცესები და სხვადასხვა სტაბილურობის რხევითი საზღვრები არაწრფივი სისტემებიხშირად შეიძლება განისაზღვროს ჰარმონიული წრფივიზაცია, რომლის ცნებაც ზემოთ იყო მოცემული. არის სხვა მეთოდებიც. აქ ყველაზე ეფექტურია გარდამავალი პროცესების აგების ციფრულ-გრაფიკული მეთოდები, ასევე, განსაკუთრებით, ელექტრული სიმულაციის მეთოდები უწყვეტი და დისკრეტული მოქმედების მათემატიკურ მანქანებზე.
რხევითი პროცესები და სხვადასხვა არაწრფივი სისტემების სტაბილურობის რხევითი საზღვრები ხშირად შეიძლება განისაზღვროს ჰარმონიული წრფივობის მეთოდით, რომლის ცნებაც ზემოთ იყო მოცემული.
ოსცილატორული პროცესები ფართოდ არის გავრცელებული ბუნებაში და ტექნოლოგიაში. საათის ქანქარის რხევა, ტალღები წყალზე, ალტერნატიული ელექტრული დენი, შუქი, ხმა სხვადასხვა რხევების მაგალითებია. ფიზიკური რაოდენობით. როდესაც ქანქარა მოძრაობს, მისი სიმძიმის ცენტრის კოორდინატი იცვლება. Როდესაც ალტერნატიული დენიძაბვა და დენი იცვლება წრედში. ეს ორი პროცესი ხარისხობრივად სრულიად განსხვავებულია მათში ფიზიკური ბუნება. თუმცა, ამ პროცესების რაოდენობრივ კანონზომიერებებს ბევრი საერთო აქვს.
ღეროებში რხევითი პროცესები გამოწვეულია არა მხოლოდ ზედაპირული აღჭურვილობის მუშაობით, არამედ დგუშის მოძრაობით. აქ სინქრონული რხევები უფრო სასურველია, ვინაიდან ქ ამ საქმესისინი არ იწვევენ გადატვირთვას.
ოსცილატორული პროცესები ფართოდ არის გავრცელებული ბუნებაში და ტექნოლოგიაში. საათის ქანქარის რხევა, ტალღები წყალზე, ალტერნატიული ელექტრული დენი, სინათლე, ხმა სხვადასხვა ფიზიკური სიდიდის რხევების მაგალითებია. როდესაც ქანქარა მოძრაობს, მისი სიმძიმის ცენტრის კოორდინატი იცვლება. ალტერნატიული დენის შემთხვევაში წრეში ძაბვა და დენი იცვლება. ეს ორი პროცესი თვისობრივად სრულიად განსხვავებულია მათი ფიზიკური ბუნებით. თუმცა, ამ პროცესების რაოდენობრივ კანონზომიერებებს ბევრი საერთო აქვს.
თავისუფალი ვიბრაციები წრეში.
წინა სექციებში განხილული AC სქემები ვარაუდობენ, რომ ელემენტების წყვილი - კონდენსატორი და ინდუქტორი ქმნიან ერთგვარ ოსცილატორ სისტემას. ახლა ჩვენ ვაჩვენებთ, რომ ეს მართლაც ასეა, წრეში, რომელიც შედგება მხოლოდ ამ ელემენტებისაგან (ნახ. 669), შესაძლებელია თავისუფალი ვიბრაციებიც კი, ანუ გარეშე. გარე წყარო EMF.
ბრინჯი. 669
ამიტომ, წრეს (ან სხვა მიკროსქემის ნაწილს), რომელიც შედგება კონდენსატორისა და ინდუქტორისაგან, ეწოდება რხევითი წრე.
დაე, კონდენსატორი დაიმუხტოს მუხტამდე qo და შემდეგ მასთან დაკავშირებული ინდუქტორი. ასეთი პროცედურა ადვილად შეიძლება განხორციელდეს მიკროსქემის გამოყენებით, რომლის სქემა ნაჩვენებია ნახ. 670: ჯერ გასაღები დახურულია პოზიციაში 1
, ხოლო კონდენსატორი დამუხტულია ძაბვის ტოლი წყარო emf, რის შემდეგაც გასაღები ისვრის პოზიციებზე 2
, რის შემდეგაც იწყება კონდენსატორის გამონადენი კოჭის მეშვეობით. 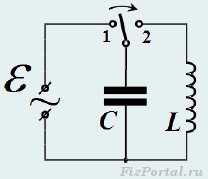
ბრინჯი. 670
კონდენსატორის დამუხტვის დროზე დამოკიდებულების დასადგენად q(t)გამოიყენეთ ომის კანონი, რომლის მიხედვითაც ძაბვა კონდენსატორზე U C = q/Cუდრის EMF თვითინდუქცია, წარმოქმნილი კოჭში 
აქ „პირველი“ ნიშნავს წარმოებულს დროის მიმართ.
ამრიგად, განტოლება მართებული აღმოჩნდება 
ეს განტოლება შეიცავს ორ უცნობ ფუნქციას - დამოკიდებულებას დატენვის დროზე q(t)და მიმდინარე მე(ტ)ასე რომ, მისი მოგვარება შეუძლებელია. თუმცა, მიმდინარე სიძლიერე არის კონდენსატორის მუხტის წარმოებული q / (t) = I (t)ასე რომ, დენის სიძლიერის წარმოებული არის მუხტის მეორე წარმოებული ![]()
ამ მიმართების გათვალისწინებით, ჩვენ ვწერთ განტოლებას (1) ფორმაში 
გასაკვირია, რომ ეს განტოლება მთლიანად ემთხვევა ჰარმონიული რხევების კარგად შესწავლილ განტოლებას (უცნობი ფუნქციის მეორე წარმოებული პროპორციულია თავად ამ ფუნქციის პროპორციულობის უარყოფითი კოეფიციენტით. x // = −ω o 2 x)! ამრიგად, ამ განტოლების ამონახსნი იქნება ჰარმონიული ფუნქცია
წრიული სიხშირით 
ეს ფორმულა განსაზღვრავს რხევადი წრედის ბუნებრივი სიხშირე. შესაბამისად, კონდენსატორის დამუხტვის რხევის პერიოდი (და დენის სიძლიერე წრედში) უდრის ![]()
რხევის პერიოდის შედეგად მიღებული გამოხატულება ეწოდება ჯ.ტომპსონის ფორმულა.
როგორც ყოველთვის, თვითნებური პარამეტრების განსაზღვრა ა, φ
in საერთო გადაწყვეტილება(4) აუცილებელია საწყისი პირობების დაყენება - მუხტი და დენის სიძლიერე საწყისი მომენტიდრო. კერძოდ, მიკროსქემის განხილული მაგალითისთვის ნახ. 670, საწყის პირობებს აქვს ფორმა: at t = 0, q = qo, I=0ასე რომ, კონდენსატორის დატენვის დროზე დამოკიდებულება აღწერილი იქნება ფუნქციით
ხოლო მიმდინარე სიძლიერე დროთა განმავლობაში იცვლება კანონის მიხედვით
რხევადი წრედის ზემოაღნიშნული განხილვა მიახლოებითია - ნებისმიერ რეალურ წრეს აქვს აქტიური წინააღმდეგობა (შემაერთებელი მავთულები და კოჭის გრაგნილები). 
ბრინჯი. 671
ამიტომ, განტოლებაში (1) მხედველობაში უნდა იქნას მიღებული ძაბვის ვარდნა ამ აქტიურ წინააღმდეგობას, ასე რომ, ეს განტოლება მიიღებს ფორმას ![]()
რომელიც მუხტისა და დენის სიძლიერის ურთიერთმიმართების გათვალისწინებით გარდაიქმნება ფორმაში 
ეს განტოლება ჩვენთვისაც ნაცნობია - ეს არის დამპალი რხევების განტოლება ![]()
და შესუსტების კოეფიციენტი, როგორც მოსალოდნელია, პროპორციულია მიკროსქემის აქტიური წინააღმდეგობის β = R/L.
პროცესები, რომლებიც მიმდინარეობს რხევითი წრე, ასევე შეიძლება აღწერილი იყოს ენერგიის შენარჩუნების კანონის გამოყენებით. თუ უგულებელყოფთ წრედის აქტიურ წინააღმდეგობას, მაშინ ენერგიების ჯამი ელექტრული ველიკონდენსატორი და მაგნიტური ველიკოჭა რჩება მუდმივი, რაც გამოიხატება განტოლებით ![]()
რომელიც ასევე არის ჰარმონიული რხევების განტოლება (5) ფორმულით განსაზღვრული სიხშირით. თავისი ფორმით, ეს განტოლება ასევე ემთხვევა მექანიკური ვიბრაციების დროს ენერგიის შენარჩუნების კანონიდან გამომდინარე განტოლებებს. რხევების აღწერის განტოლებიდან ელექტრული მუხტიკონდენსატორი მსგავსია აღწერილ განტოლებათა მექანიკური ვიბრაციები, მაშინ ჩვენ შეგვიძლია გავავლოთ ანალოგია რხევის წრეში მიმდინარე პროცესებსა და ნებისმიერ პროცესს შორის. მექანიკური სისტემა. ნახ. 672 ასეთი ანალოგია შედგენილია რხევებისთვის მათემატიკური გულსაკიდი. ამ შემთხვევაში, ანალოგები არის "კონდენსატორის მუხტი q(t)− ქანქარის გადახრის კუთხე φ(t)” და ”მიმდინარე I(t) = q / (t)− ქანქარის სიჩქარე V(t)». 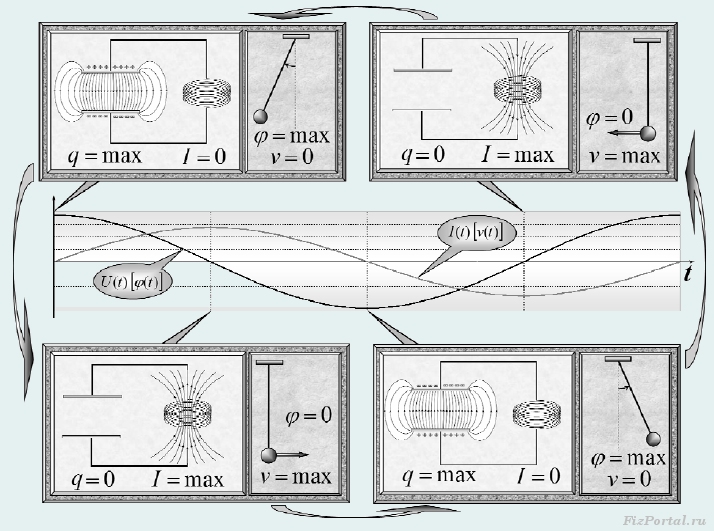
ბრინჯი. 672
ამ ანალოგიის გამოყენებით, ჩვენ ხარისხობრივად აღვწერთ მუხტის რხევების პროცესს და ელექტრო დენიკონტურში. დროის საწყის მომენტში, კონდენსატორი დამუხტულია, ელექტრული დენის სიძლიერე ნულის ტოლია, მთელი ენერგია შეიცავს კონდენსატორის ელექტრული ველის ენერგიას (რაც მსგავსია ქანქარის მაქსიმალური გადახრის წონასწორობიდან. პოზიცია). შემდეგ კონდენსატორი იწყებს გამონადენს, იზრდება დენის სიძლიერე, ხოლო თვითინდუქციური EMF ხდება კოჭში, რაც ხელს უშლის დენის გაზრდას; კონდენსატორის ენერგია მცირდება, გადაიქცევა კოჭის მაგნიტური ველის ენერგიად (ანალოგია - ქანქარა მოძრაობს ქვედა წერტილიმზარდი სიჩქარით). როდესაც კონდენსატორის დამუხტვა ხდება ნული, დენის სიძლიერე აღწევს მაქსიმალურ მნიშვნელობას, ხოლო მთელი ენერგია გარდაიქმნება მაგნიტური ველის ენერგიად (ქანქარა მიაღწია ყველაზე დაბალ წერტილს, მისი სიჩქარე მაქსიმალურია). შემდეგ მაგნიტური ველი იწყებს შემცირებას, ხოლო თვითინდუქციური EMF ინარჩუნებს დენს იმავე მიმართულებით, ხოლო კონდენსატორი იწყებს დამუხტვას, ხოლო კონდენსატორის ფირფიტებზე მუხტების ნიშნები საპირისპიროა საწყისი განაწილების (ანალოგური - ქანქარა გადადის საპირისპირო საწყის მაქსიმალურ გადახრაზე). შემდეგ წრეში დენი ჩერდება, ხოლო კონდენსატორის მუხტი კვლავ ხდება მაქსიმალური, მაგრამ საპირისპირო ნიშნით (ქანქარა მიაღწია მაქსიმალურ გადახრას), რის შემდეგაც პროცესი განმეორდება საპირისპირო მიმართულებით.
ლექცია #8
მექანიკა
რყევები
რხევითი მოძრაობა. რხევითი მოძრაობის კინემატიკური და დინამიკური მახასიათებლები. მათემატიკური, ფიზიკური და საგაზაფხულო ქანქარა.
ჩვენ ვცხოვრობთ სამყაროში, სადაც რხევითი პროცესები ჩვენი სამყაროს განუყოფელი ნაწილია და ყველგან გვხვდება.
რხევითი პროცესი ან რხევა არის პროცესი, რომელიც განსხვავდება განმეორების ამა თუ იმ ხარისხით.
თუ რხევადი სიდიდე იმეორებს თავის მნიშვნელობებს რეგულარული ინტერვალებით, მაშინ ასეთ რხევებს ეწოდება პერიოდული, ხოლო დროის ამ პერიოდებს რხევის პერიოდი ეწოდება.
ფენომენის ფიზიკური ხასიათიდან გამომდინარე განასხვავებენ რხევებს: მექანიკურს, ელექტრომექანიკურს, ელექტრომაგნიტურს და ა.შ.
რყევები ფართოდ არის გავრცელებული ბუნებაში და ტექნოლოგიაში. რხევითი პროცესები ემყარება მექანიკის ზოგიერთ დარგს. ლექციების ამ კურსში მხოლოდ მექანიკურ ვიბრაციებზე ვისაუბრებთ.
რხევის სისტემაზე ზემოქმედების ხასიათიდან გამომდინარე, რხევებს განასხვავებენ: 1. თავისუფალი ან ბუნებრივი, 2. იძულებითი რხევები, 3. თვითრხევები, 4. პარამეტრული რხევები.
თავისუფალ რხევებს უწოდებენ რხევებს, რომლებიც წარმოიქმნება გარე ზემოქმედების გარეშე და გამოწვეულია საწყისი „ბიძგით“.
იძულებითი ვიბრაციები ხდება პერიოდული გარეგანი ძალის მოქმედებით
გარე ძალის მოქმედებით ასევე ხდება თვითრხევები, მაგრამ სისტემაზე ძალის მოქმედების მომენტს თავად რხევითი სისტემა განსაზღვრავს.
გარე გავლენის გამო პარამეტრული რხევებით, ხდება სისტემის პარამეტრების პერიოდული ცვლილება, რაც იწვევს ამ ტიპის რხევას.
უმარტივესი ფორმაა ჰარმონიული ვიბრაციები
ჰარმონიული ვიბრაციები არის ვიბრაციები, რომლებიც წარმოიქმნება კანონის შესაბამისადცოდვა ანcos . ჰარმონიული რხევების მაგალითია მათემატიკური ქანქარის რხევა
რხევის პროცესში რხევადი სიდიდის მაქსიმალურ გადახრას ეწოდება რხევის ამპლიტუდა(მაგრამ) . დრო, რომელიც სჭირდება ერთი სრული რხევის დასრულებას, ეწოდება რხევის პერიოდი(T) . რხევის პერიოდის ორმხრივი ეწოდება რხევის სიხშირე(). ხშირად რყევებს 2-ზე გამრავლებული ეწოდება ციკლური სიხშირე(). ამრიგად, ჰარმონიული რხევები აღწერილია გამოხატვით
Აქ ( ტ+ 0 ) რხევის ფაზა და 0 - საწყისი ეტაპი
უმარტივესი მექანიკური რხევითი სისტემებია ე.წ.: მათემატიკური, ზამბარა და ფიზიკური გულსაკიდი. მოდით უფრო ახლოს მივხედოთ ამ ქანქარებს.
8.1. მათემატიკური გულსაკიდი
მათემატიკური ქანქარა არის რხევითი სისტემა, რომელიც შედგება მასიური წერტილის სხეულისგან, რომელიც დაკიდულია სიმძიმის ველში გაუწელვებელ უწონო ძაფზე.

ქვედა წერტილში ქანქარას აქვს მინიმალური პოტენციური ენერგია. გადავუხვიოთ გულსაკიდი კუთხით. მასიური წერტილის სხეულის სიმძიმის ცენტრი აიწევს სიმაღლეზე თდა ამ შემთხვევაში ქანქარის პოტენციური ენერგია მნიშვნელობით გაიზრდება მგ თ. გარდა ამისა, გადახრილ მდგომარეობაში წონაზე გავლენას ახდენს გრავიტაცია და ძაფის დაძაბულობა. ამ ძალების მოქმედების ხაზები არ ემთხვევა ერთმანეთს და შედეგად მიღებული ძალა მოქმედებს დატვირთვაზე და მიდრეკილია დააბრუნოს იგი წონასწორობის მდგომარეობაში. თუ დატვირთვა არ არის შენარჩუნებული, მაშინ ამ ძალის მოქმედებით იგი დაიწყებს გადაადგილებას საწყის წონასწორობის მდგომარეობაში, მისი კინეტიკური ენერგია გაიზრდება სიჩქარის გაზრდის გამო, ხოლო პოტენციური ენერგია მცირდება. წონასწორობის წერტილის მიღწევისას მიღებული ძალა აღარ იმოქმედებს სხეულზე (მიზიდულობის ძალა ამ ეტაპზე კომპენსირდება ძაფის დაჭიმვის ძალით). სხეულის პოტენციური ენერგია ამ ეტაპზე მინიმალური იქნება, ხოლო კინეტიკური ენერგია, პირიქით, ექნება საკუთარი. მაქსიმალური მნიშვნელობა. სხეული, რომელიც მოძრაობს ინერციით, გაივლის წონასწორობის მდგომარეობას და დაიწყებს მისგან დაშორებას, რაც გამოიწვევს შედეგად წარმოქმნილი ძალის წარმოქმნას (დაძაბულობისა და გრავიტაციისგან), რომელიც მიმართული იქნება სხეულის მოძრაობის წინააღმდეგ, ანელებს მას. ქვემოთ. ეს იწყებს შემცირებას კინეტიკური ენერგიატვირთი და მისი გაზრდა პოტენციური ენერგია. ეს პროცესი გაგრძელდება კინეტიკური ენერგიის რეზერვების სრულ ამოწურვამდე და მის პოტენციურ ენერგიაზე გადასვლამდე. ამ შემთხვევაში დატვირთვის გადახრა წონასწორული პოზიციიდან მიაღწევს მაქსიმალურ მნიშვნელობას და პროცესი განმეორდება. თუ სისტემაში ხახუნი არ არის, დატვირთვა განუსაზღვრელი ვადით ირხევა.
ამრიგად, ოსცილატორული მექანიკური სისტემები ხასიათდება იმით, რომ როდესაც ისინი გადახრის წონასწორობის პოზიციიდან, სისტემაში წარმოიქმნება აღმდგენი ძალა, რომელიც მიდრეკილია სისტემის წონასწორობის მდგომარეობაში დაბრუნებაში. ამ შემთხვევაში ხდება რხევები, რომელსაც თან ახლავს სისტემის პოტენციური ენერგიის პერიოდული გადასვლა მის კინეტიკურ ენერგიაში და პირიქით.
გამოთვალეთ რხევითი პროცესი. ძალების მომენტი მქანქარზე მოქმედება აშკარად უდრის - მგლსინი მინუს ნიშანი ასახავს იმ ფაქტს, რომ ძალების მომენტი მიდრეკილია დააბრუნოს დატვირთვა წონასწორობის მდგომარეობაში. მეორე მხრივ, ძირითადი კანონის მიხედვით მბრუნავი მოძრაობა M=ID 2 / dt 2 . ამრიგად, ჩვენ ვიღებთ თანასწორობას
ბ  განვიხილოთ ქანქარის გადახრის მხოლოდ მცირე კუთხეები წონასწორობის პოზიციიდან. მერე ცოდვა
≈
.
და ჩვენი თანასწორობა მიიღებს ფორმას:
განვიხილოთ ქანქარის გადახრის მხოლოდ მცირე კუთხეები წონასწორობის პოზიციიდან. მერე ცოდვა
≈
.
და ჩვენი თანასწორობა მიიღებს ფორმას:
დ  მათემატიკური ქანქარისთვის ეს მართალია მე=
მლ 2
. ამ თანასწორობის შედეგად გამოსახულებაში ჩანაცვლებით, მივიღებთ განტოლებას, რომელიც აღწერს მათემატიკური ქანქარის რხევის პროცესს:
მათემატიკური ქანქარისთვის ეს მართალია მე=
მლ 2
. ამ თანასწორობის შედეგად გამოსახულებაში ჩანაცვლებით, მივიღებთ განტოლებას, რომელიც აღწერს მათემატიკური ქანქარის რხევის პროცესს:
ეს დიფერენციალური განტოლება აღწერს რხევის პროცესს. ამ განტოლების გამოსავალი არის ჰარმონიული ფუნქციები ცოდვა( ტ+ 0 ) ან cos ( ტ+ 0 ) მართლაც, ჩვენ ვცვლით რომელიმე ამ ფუნქციას განტოლებაში და ვიღებთ: 2 = გ/ ლ. ამრიგად, თუ ეს პირობა დაკმაყოფილებულია, მაშინ ფუნქციები ცოდვა( ტ+ 0 ) ან cos( ტ+ 0 ) რხევების დიფერენციალური განტოლება იდენტურად აქციოს.
ო  აქ ჰარმონიული ქანქარის რხევის ციკლური სიხშირე და პერიოდი გამოიხატება როგორც:
აქ ჰარმონიული ქანქარის რხევის ციკლური სიხშირე და პერიოდი გამოიხატება როგორც:
რხევის ამპლიტუდა გვხვდება პრობლემის საწყისი პირობებიდან.
როგორც ხედავთ, მათემატიკური ქანქარის რხევის სიხშირე და პერიოდი არ არის დამოკიდებული დატვირთვის მასაზე და დამოკიდებულია მხოლოდ სიმძიმის აჩქარებაზე და დაკიდების ძაფის სიგრძეზე, რაც საშუალებას აძლევს ქანქარას გამოიყენოს როგორც მარტივი. მაგრამ ძალიან ზუსტი მოწყობილობა გრავიტაციის აჩქარების დასადგენად.
ქანქარის სხვა სახეობაა ნებისმიერი ფიზიკური სხეული, რომელიც შეჩერებულია სხეულის ნებისმიერი წერტილიდან და აქვს რხევითი მოძრაობის შესრულების უნარი.
8.2. ფიზიკური გულსაკიდი
AT  ავიღოთ თვითნებური სხეული, გავხვრიტოთ ის რაღაც მომენტში ღერძით, რომელიც არ ემთხვევა მის მასის ცენტრს, რომლის გარშემოც სხეული თავისუფლად ბრუნავს. გააჩერეთ სხეული ამ ღერძზე და გადაუხვიეთ წონასწორობის პოზიციიდან გარკვეული კუთხით
.
ავიღოთ თვითნებური სხეული, გავხვრიტოთ ის რაღაც მომენტში ღერძით, რომელიც არ ემთხვევა მის მასის ცენტრს, რომლის გარშემოც სხეული თავისუფლად ბრუნავს. გააჩერეთ სხეული ამ ღერძზე და გადაუხვიეთ წონასწორობის პოზიციიდან გარკვეული კუთხით
.
თ როდესაც სხეულზე ინერციის მომენტით მეღერძის შესახებ ოიმოქმედებს წონასწორობის პოზიციაზე დაბრუნების მომენტი M = -
მგლსინი
და ფიზიკური ქანქარის რხევები, ისევე როგორც მათემატიკური, აღწერილი იქნება დიფერენციალური განტოლებით:
ვინაიდან სხვადასხვა ფიზიკური ქანქარისთვის ინერციის მომენტი განსხვავებულად იქნება გამოხატული, ჩვენ არ აღვწერთ მას, როგორც მათემატიკური ქანქარის შემთხვევაში. ამ განტოლებას ასევე აქვს რხევის განტოლების ფორმა, რომლის ამოხსნა არის ჰარმონიული რხევების აღწერის ფუნქციები. ამ შემთხვევაში, ციკლური სიხშირე ( ) , რხევის პერიოდი (T)განისაზღვრება როგორც:
ჩვენ ვხედავთ, რომ ფიზიკური ქანქარის შემთხვევაში, რხევის პერიოდი დამოკიდებულია ქანქარის სხეულის გეომეტრიაზე და არა მის მასაზე, როგორც მათემატიკური ქანქარის შემთხვევაში. მართლაც, ინერციის მომენტის გამოხატულება მოიცავს ქანქარის მასას პირველ ხარისხამდე. რხევის პერიოდის გამოხატულებაში ინერციის მომენტი არის მრიცხველში, ხოლო ქანქარის მასა შედის მნიშვნელში და ასევე პირველ ხარისხში. ასე რომ, მრიცხველში მასა უქმდება მნიშვნელში არსებული მასით.
ფიზიკურ ქანქარს აქვს კიდევ ერთი მახასიათებელი - შემცირებული სიგრძე.
ფიზიკური ქანქარის შემცირებული სიგრძე არის მათემატიკური ქანქარის სიგრძე, რომლის პერიოდი ემთხვევა ფიზიკური ქანქარის პერიოდს.
ეს განმარტება აადვილებს გამოხატვის განსაზღვრას შემცირებული სიგრძისთვის.
ამ გამონათქვამების შედარებისას მივიღებთ

თუ შეჩერების წერტილიდან გავლებულ ხაზზე ფიზიკური ქანქარის მასის ცენტრის გავლით გამოვსახავთ (დაკიდების წერტილიდან დაწყებული) ფიზიკური ქანქარის შემცირებულ სიგრძეს, მაშინ ამ სეგმენტის ბოლოს იქნება წერტილი, რომელიც აქვს ღირსშესანიშნავი ქონება. თუ ფიზიკური ქანქარა შეჩერებულია ამ წერტილიდან, მაშინ მისი რხევის პერიოდი იგივე იქნება, რაც წინა დაკიდების წერტილში ქანქარის შეჩერებისას. ამ წერტილებს ეწოდება ფიზიკური ქანქარის სვინგის ცენტრები.
განვიხილოთ კიდევ ერთი მარტივი რხევითი სისტემა, რომელიც ასრულებს ჰარმონიულ რხევებს
8.3. საგაზაფხულო ქანქარა
პ  წარმოიდგინეთ, რომ გაზაფხულის ბოლოს სიხისტის კოეფიციენტით კწონა ერთვის მ.
წარმოიდგინეთ, რომ გაზაფხულის ბოლოს სიხისტის კოეფიციენტით კწონა ერთვის მ.
თუ დატვირთვას x ღერძის გასწვრივ ზამბარის გაჭიმვით გადავიტანთ, წონასწორობის პოზიციაზე დაბრუნებული ძალა იმოქმედებს დატვირთვაზე. ფ დაბრუნების = - kx. თუ დატვირთვა გათავისუფლდება, მაშინ ეს ძალა გამოიწვევს აჩქარებას დ 2 x / dt 2 . ნიუტონის მეორე კანონის მიხედვით ვიღებთ:
მდ 2 x / dt 2 = - kxამ განტოლებიდან ვიღებთ განტოლებას ზამბარზე დატვირთვის რხევის საბოლოო სახით: დ 2 x / dt 2 + (კ/ მ) x = 0
ე  მაშინ რხევის განტოლებას აქვს იგივე ფორმა, რაც უკვე განხილულ შემთხვევებში რხევის განტოლებებს, რაც ნიშნავს, რომ ამ განტოლების ამონახსნი იქნება იგივე ჰარმონიული ფუნქციები. რხევების სიხშირე და პერიოდი შესაბამისად თანაბარი იქნება
მაშინ რხევის განტოლებას აქვს იგივე ფორმა, რაც უკვე განხილულ შემთხვევებში რხევის განტოლებებს, რაც ნიშნავს, რომ ამ განტოლების ამონახსნი იქნება იგივე ჰარმონიული ფუნქციები. რხევების სიხშირე და პერიოდი შესაბამისად თანაბარი იქნება
უფრო მეტიც, მიზიდულობის ძალა არანაირად არ მოქმედებს ზამბარის ქანქარის რხევებზე. ვინაიდან ამ შემთხვევაში ეს არის მუდმივად მოქმედი ფაქტორი, რომელიც მოქმედებს მუდმივად ერთი მიმართულებით და არავითარი კავშირი არ აქვს აღდგენის ძალასთან.
ამრიგად, როგორც ვხედავთ რხევის პროცესს მექანიკურ რხევად სისტემაში, იგი ხასიათდება ძირითადად სისტემაში ყოფნით. ძალის აღდგენასისტემაზე მოქმედი და თავად რხევები ხასიათდება: რყევების ამპლიტუდა მათი პერიოდის, სიხშირისა და რყევების ფაზის მიხედვით.
