Antes de dar o conceito de produto vetorial, voltemos à questão da orientação do triplo ordenado dos vetores a → , b → , c → no espaço tridimensional.
Para começar, vamos deixar de lado os vetores a → , b → , c → de um ponto. A orientação do triplo a → , b → , c → é direita ou esquerda, dependendo da direção do vetor c → . A partir da direção em que a volta mais curta é feita do vetor a → para b → do final do vetor c → , a forma do triplo a → , b → , c → será determinada.
Se a rotação mais curta for no sentido anti-horário, então o triplo dos vetores a → , b → , c → é chamado direita se no sentido horário - deixou.
Em seguida, pegue dois vetores não colineares a → e b → . Vamos então adiar os vetores A B → = a → e A C → = b → do ponto A. Vamos construir um vetor A D → = c → , que é simultaneamente perpendicular a ambos A B → e A C → . Assim, ao construir o vetor A D → = c →, podemos fazer duas coisas, dando-lhe uma direção ou a direção oposta (veja a ilustração).

O trio ordenado de vetores a → , b → , c → pode ser, como descobrimos, à direita ou à esquerda, dependendo da direção do vetor.
A partir do exposto, podemos introduzir a definição de um produto vetorial. Esta definição dado para dois vetores definidos em sistema retangular coordenadas espaço tridimensional.
Definição 1
O produto vetorial de dois vetores a → e b → chamaremos tal vetor dado em um sistema de coordenadas retangulares do espaço tridimensional tal que:
- se os vetores a → e b → forem colineares, será zero;
- será perpendicular ao vetor a → e ao vetor b → ou seja. ∠ a → c → = ∠ b → c → = π 2 ;
- seu comprimento é determinado pela fórmula: c → = a → b → sin ∠ a → , b → ;
- o tripleto de vetores a → , b → , c → tem a mesma orientação que o sistema de coordenadas dado.
produto vetorial os vetores a → e b → tem a seguinte notação: a → × b → .
Coordenadas do produto cruzado
Como qualquer vetor tem certas coordenadas no sistema de coordenadas, é possível introduzir uma segunda definição do produto vetorial, que permitirá encontrar suas coordenadas a partir das coordenadas fornecidas dos vetores.
Definição 2
Em um sistema de coordenadas retangulares de espaço tridimensional produto vetorial de dois vetores a → = (a x ; a y ; a z) e b → = (b x ; b y ; b z) chame o vetor c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → , onde i → , j → , k → são vetores coordenados.
O produto vetorial pode ser representado como um determinante matriz quadrada de terceira ordem, onde a primeira linha são os vetores i → , j → , k → , a segunda linha contém as coordenadas do vetor a → , e a terceira linha contém as coordenadas do vetor b → em uma dada coordenada retangular sistema, este determinante da matriz se parece com isso: c → = a → × b → = i → j → k → a x a y a z b x b y b z
Expandindo este determinante sobre os elementos da primeira linha, obtemos a igualdade: c → = a → × b → = i → j → k → a x a y a z b x b y b z = a y a z b y b z i → - a x a z b x b z j → + a x a y b x b y k → = = a → × b → = ( a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →
Propriedades de produtos cruzados
Sabe-se que o produto vetorial em coordenadas é representado como o determinante da matriz c → = a → × b → = i → j → k → a x a y a z b x b y b z , então na base propriedades determinantes da matriz Os seguintes propriedades do produto vetorial:
- anticomutatividade a → × b → = - b → × a → ;
- distributividade a (1) → + a (2) → × b = a (1) → × b → + a (2) → × b → ou a → × b (1) → + b (2) → = a → × b (1) → + a → × b (2) → ;
- associatividade λ a → × b → = λ a → × b → ou a → × (λ b →) = λ a → × b → , onde λ é um número real arbitrário.
Essas propriedades não complicam as provas.
Por exemplo, podemos provar a propriedade anticomutatividade de um produto vetorial.
Prova de anticomutatividade
Por definição, a → × b → = i → j → k → a x a y a z b x b y b z e b → × a → = i → j → k → b x b y b z a x a y a z . E se duas linhas da matriz são trocadas, então o valor do determinante da matriz deve mudar para o oposto, portanto, a → × b → = i → j → k → a x a y a z b x b y b z = - i → j → k → b x b y b z a x a y a z = - b → × a → , o que e prova a anticomutatividade do produto vetorial.
Produto Vector - Exemplos e Soluções
Na maioria dos casos, existem três tipos de tarefas.
Em problemas do primeiro tipo, os comprimentos de dois vetores e o ângulo entre eles geralmente são dados, mas você precisa encontrar o comprimento do produto vetorial. Nesse caso, use a seguinte fórmula c → = a → b → sin ∠ a → , b → .
Exemplo 1
Encontre o comprimento do produto vetorial dos vetores a → e b → se a → = 3 , b → = 5 , ∠ a → , b → = π 4 é conhecido.
Decisão
Usando a definição do comprimento do produto vetorial dos vetores a → e b → resolvemos esta tarefa: a → × b → = a → b → sen ∠ a → , b → = 3 5 sen π 4 = 15 2 2 .
Responda: 15 2 2 .
As tarefas do segundo tipo têm uma conexão com as coordenadas dos vetores, contêm um produto vetorial, seu comprimento, etc. pesquisado através coordenadas conhecidas vetores dados a → = (a x ; a y ; a z) e b → = (b x ; b y ; b z) .
Para este tipo de tarefa, você pode resolver muitas opções de tarefas. Por exemplo, não as coordenadas dos vetores a → e b → , mas suas expansões em termos de vetores de coordenadas Gentil b → = b x i → + b y j → + b z k → e c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → , ou os vetores a → e b → podem ser dados pelas coordenadas de seus pontos inicial e final.
Considere os exemplos a seguir.
Exemplo 2
Dois vetores são definidos em um sistema de coordenadas retangular a → = (2 ; 1 ; - 3) , b → = (0 ; - 1 ; 1) . Encontre seu produto vetorial.
Decisão
Pela segunda definição, encontramos o produto vetorial de dois vetores em coordenadas dadas: a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → = = (1 1 - (- 3) (- 1)) i → + (( - 3) 0 - 2 1) j → + (2 (- 1) - 1 0) k → = = - 2 i → - 2 j → - 2 k → .
Se escrevermos o produto vetorial em termos do determinante da matriz, então a solução este exemplo fica assim: a → × b → = i → j → k → a x a y a z b x b y b z = i → j → k → 2 1 - 3 0 - 1 1 = - 2 i → - 2 j → - 2 k → .
Responda: a → × b → = - 2 i → - 2 j → - 2 k → .
Exemplo 3
Encontre o comprimento do produto vetorial dos vetores i → - j → ei → + j → + k → , onde i → , j → , k → - orts de um sistema de coordenadas cartesianas retangular.
Decisão
Primeiro, vamos encontrar as coordenadas do produto vetorial dado i → - j → × i → + j → + k → no sistema de coordenadas retangular dado.
Sabe-se que os vetores i → - j → ei → + j → + k → possuem coordenadas (1 ; - 1 ; 0) e (1 ; 1 ; 1) respectivamente. Encontre o comprimento do produto vetorial usando o determinante da matriz, então temos i → - j → × i → + j → + k → = i → j → k → 1 - 1 0 1 1 1 = - i → - j → + 2k → .
Portanto, o produto vetorial i → - j → × i → + j → + k → tem coordenadas (- 1 ; - 1 ; 2) no sistema de coordenadas dado.
Encontramos o comprimento do produto vetorial pela fórmula (veja a seção sobre como encontrar o comprimento do vetor): i → - j → × i → + j → + k → = - 1 2 + - 1 2 + 2 2 = 6 .
Responda: i → -j → × i → + j → + k → = 6 . .
Exemplo 4
Em um retângulo sistema cartesiano coordenadas são as coordenadas de três pontos A (1 , 0 , 1) , B (0 , 2 , 3) , C (1 , 4 , 2) . Encontre algum vetor perpendicular a A B → e A C → ao mesmo tempo.
Decisão
Os vetores A B → e A C → possuem as seguintes coordenadas (- 1 ; 2 ; 2) e (0 ; 4 ; 1) respectivamente. Tendo encontrado o produto vetorial dos vetores A B → e A C → , é óbvio que é um vetor perpendicular por definição tanto a A B → quanto a A C → , ou seja, é a solução do nosso problema. Encontre A B → × A C → = i → j → k → - 1 2 2 0 4 1 = - 6 i → + j → - 4 k → .
Responda: - 6 i → + j → - 4 k → . é um dos vetores perpendiculares.
Os problemas do terceiro tipo são focados no uso das propriedades do produto vetorial de vetores. Após aplicar qual, obteremos uma solução para o problema dado.
Exemplo 5
Os vetores a → e b → são perpendiculares e seus comprimentos são 3 e 4 respectivamente. Encontre o comprimento do produto vetorial 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b → .
Decisão
Pela propriedade da distributividade do produto vetorial, podemos escrever 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b →
Pela propriedade da associatividade, retiramos os coeficientes numéricos além do sinal dos produtos vetoriais na última expressão: 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b → = = 3 a → × a → + 3 (- 2) a → × b → + (- 1) b → × a → + (- 1) (- 2) b → × b → = = 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b →
Os produtos vetoriais a → × a → e b → × b → são iguais a 0, pois a → × a → = a → a → sen 0 = 0 e b → × b → = b → b → sen 0 = 0 , então 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b → = - 6 a → × b → - b → × a → . .
Da anticomutatividade do produto vetorial segue - 6 a → × b → - b → × a → = - 6 a → × b → - (- 1) a → × b → = - 5 a → × b → . .
Usando as propriedades do produto vetorial, obtemos a igualdade 3 · a → - b → × a → - 2 · b → = = - 5 · a → × b → .
Por condição, os vetores a → e b → são perpendiculares, ou seja, o ângulo entre eles é π 2 . Agora resta apenas substituir os valores encontrados nas fórmulas correspondentes: 3 a → - b → × a → - 2 b → = - 5 a → × b → = = 5 a → × b → = 5 a → b → sen (a →, b →) = 5 3 4 sen π 2 = 60.
Responda: 3 a → - b → × a → - 2 b → = 60 .
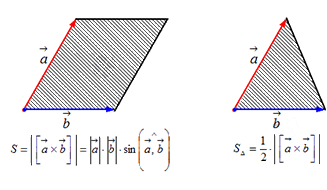
O comprimento do produto vetorial de vetores por definição é a → × b → = a → · b → · sen ∠ a → , b → . Como já se sabe (de curso escolar) que a área de um triângulo é metade do produto dos comprimentos de seus dois lados multiplicado pelo seno do ângulo entre os lados dados. Portanto, o comprimento do produto vetorial é igual à área de um paralelogramo - um triângulo dobrado, ou seja, o produto dos lados na forma de vetores a → e b → , separados de um ponto, pelo seno do ângulo entre eles sen ∠ a → , b → .
É isso que é sentido geométrico produto vetorial.
O significado físico do produto vetorial
Na mecânica, um dos ramos da física, graças ao produto vetorial, você pode determinar o momento da força em relação a um ponto no espaço.
Definição 3
Sob o momento da força F → , aplicada ao ponto B , em relação ao ponto A entenderemos o seguinte produto vetorial A B → × F → .
Se você notar um erro no texto, destaque-o e pressione Ctrl+Enter
7.1. Definição de produto cruzado
Três vetores não coplanares a , b e c , tomados na ordem indicada, formam um triplo à direita se do final do terceiro vetor c a volta mais curta do primeiro vetor a para o segundo vetor b for vista no sentido anti-horário, e um esquerdo se no sentido horário (ver Fig. . dezesseis).
O produto vetorial de um vetor a e um vetor b é chamado de vetor c, que:
1. Perpendicular aos vetores a e b, ou seja, c ^ a e c ^ b;
2. Tem um comprimento numericamente igual à área do paralelogramo construído sobre os vetores a eb como nas laterais (ver fig. 17), ou seja.
3. Os vetores a , b e c formam uma tripla reta.


O produto vetorial é denotado a x b ou [a,b]. Da definição de um produto vetorial, as seguintes relações entre os orts i seguem diretamente, j e k(ver fig. 18):
i x j \u003d k, j x k \u003d i, k x i \u003d j.
Vamos provar, por exemplo, que i xj \u003d k.
1) k ^ i , k ^ j;
2) |k |=1, mas | eu x j| = |eu | |J| sin(90°)=1;
3) vetores i , j e k formar um triplo direito (ver Fig. 16).
7.2. Propriedades de produtos cruzados
1. Quando os fatores são rearranjados, o produto vetorial muda de sinal, ou seja, e xb \u003d (b xa) (veja a Fig. 19).
Os vetores a xb e b xa são colineares, têm os mesmos módulos (a área do paralelogramo permanece inalterada), mas são direcionados de forma oposta (triplos a, b e xb e a, b, b x a de orientação oposta). Isso é axb = -(bxa).
2. O produto vetorial tem propriedade associativa em relação a um fator escalar, ou seja, l (a xb) \u003d (l a) x b \u003d a x (l b).

Seja l > 0. O vetor l (a xb) é perpendicular aos vetores aeb. Vetor ( eu a) x b também é perpendicular aos vetores a e b(vetores a, eu mas estão no mesmo plano). Então os vetores eu(a xb) e ( eu a) x b colinear. É óbvio que suas direções coincidem. Eles têm o mesmo comprimento:
então eu(a xb)= eu um xb. Prova-se da mesma forma para eu<0.
3. Dois vetores diferentes de zero a e b são colineares se e somente se seu produto vetorial for igual ao vetor zero, ou seja, e ||b<=>e xb \u003d 0.

Em particular, i *i =j *j =k *k =0.
4. O produto vetorial tem uma propriedade de distribuição:
(a+b) x = a x + b xs.
Aceite sem provas.
7.3. Expressão do produto cruzado em termos de coordenadas
Usaremos a tabela de produto vetorial vetorial i , j e k:

se a direção do caminho mais curto do primeiro vetor para o segundo coincide com a direção da seta, então o produto é igual ao terceiro vetor, se não corresponder, o terceiro vetor é obtido com um sinal de menos.
Sejam dois vetores a =a x i +a y j+az k e b = bx eu+por j+bz k. Vamos encontrar o produto vetorial desses vetores multiplicando-os como polinômios (de acordo com as propriedades do produto vetorial):

![]()
A fórmula resultante pode ser escrita ainda mais curta:

como o lado direito da igualdade (7.1) corresponde à expansão do determinante de terceira ordem em termos dos elementos da primeira linha, a igualdade (7.2) é fácil de lembrar.
7.4. Algumas aplicações do produto cruzado
Estabelecendo colinearidade de vetores

Encontrando a área de um paralelogramo e um triângulo
De acordo com a definição do produto vetorial de vetores uma e B |a xb | =| um | * |b |sing g , ou seja, S par = |a x b |. E, portanto, D S \u003d 1/2 | a x b |.
Determinando o momento da força em relação a um ponto
Seja aplicada uma força no ponto A F = AB deixa para lá O- algum ponto no espaço (ver Fig. 20).

Sabe-se da física que torque F em relação ao ponto O chamado vetor M , que passa pelo ponto O e:
1) perpendicular ao plano que passa pelos pontos O, A, B;
2) numericamente igual ao produto da força pelo ombro
3) forma uma tripla reta com os vetores OA e AB .
Portanto, M \u003d OA x F.
Encontrando a velocidade linear de rotação
Velocidade v pontos M corpo sólido, girando com velocidade angular W em torno de um eixo fixo, é determinado pela fórmula de Euler v \u003d w x r, onde r \u003d OM, onde O é algum ponto fixo do eixo (veja a Fig. 21).

Vetor de unidade- Esse vetor, cujo valor absoluto (módulo) é igual a um. Para denotar um vetor unitário, usaremos o subscrito e. Então, se um vetor for dado uma, então seu vetor unitário será o vetor uma e. Este vetor unitário aponta na mesma direção que o próprio vetor uma, e seu módulo é igual a um, ou seja, a e \u003d 1.
Obviamente, uma= um uma e (um - módulo vetorial a). Isso decorre da regra pela qual a operação de multiplicar um escalar por um vetor é realizada.
Vetores de unidade frequentemente associado aos eixos de coordenadas do sistema de coordenadas (em particular, aos eixos do sistema de coordenadas cartesiano). Direções destes vetores coincidem com as direções dos eixos correspondentes, e suas origens são frequentemente combinadas com a origem do sistema de coordenadas.
Deixe-me lembrá-lo que Sistema de coordenada cartesiana no espaço é tradicionalmente chamado de um triplo de eixos mutuamente perpendiculares que se cruzam em um ponto chamado origem. Os eixos coordenados geralmente são indicados pelas letras X, Y, Z e são chamados de eixo de abcissas, eixo de ordenadas e eixo de aplicação, respectivamente. O próprio Descartes usou apenas um eixo, no qual as abcissas foram plotadas. mérito de uso sistemas eixos pertence a seus alunos. Por isso a frase Sistema de coordenada cartesiana historicamente errado. Melhor falar retangular sistema de coordenadas ou sistema de coordenadas ortogonais. No entanto, não mudaremos as tradições e no futuro assumiremos que os sistemas de coordenadas cartesianas e retangulares (ortogonais) são um e o mesmo.
Vetor de unidade, dirigido ao longo do eixo X, é denotado eu, vetor de unidade, direcionado ao longo do eixo Y, é denotado j, uma vetor de unidade, dirigido ao longo do eixo Z, é denotado k. Vetores eu, j, k chamado ortes(Fig. 12, esquerda), possuem módulos únicos, ou seja,
i = 1, j = 1, k = 1.
eixos e ortes sistema de coordenadas retangulares em alguns casos, eles têm outros nomes e designações. Assim, o eixo de abscissa X pode ser chamado de eixo tangente, e seu vetor unitário é denotado τ (do grego tau minúsculo), o eixo y é o eixo normal, seu vetor unitário é denotado n, o eixo aplicado é o eixo da binormal, seu vetor unitário é denotado b. Por que mudar os nomes se a essência permanece a mesma?
O fato é que, por exemplo, na mecânica, ao estudar o movimento dos corpos, um sistema de coordenadas retangulares é usado com muita frequência. Portanto, se o próprio sistema de coordenadas é imóvel e a mudança nas coordenadas de um objeto em movimento é rastreada nesse sistema imóvel, geralmente os eixos denotam X, Y, Z e seus ortes respectivamente eu, j, k.
Mas muitas vezes, quando um objeto se move ao longo de algum tipo de trajetória curvilínea (por exemplo, ao longo de um círculo), é mais conveniente considerar processos mecânicos em um sistema de coordenadas movendo-se com esse objeto. É para tal sistema de coordenadas em movimento que outros nomes dos eixos e seus vetores unitários são usados. É apenas aceito. Neste caso, o eixo X é direcionado tangencialmente à trajetória no ponto onde este objeto está localizado atualmente. E então esse eixo não é mais chamado de eixo X, mas o eixo tangente, e seu vetor unitário não é mais denotado eu, uma τ . O eixo Y é direcionado ao longo do raio de curvatura da trajetória (no caso de movimento em um círculo - para o centro do círculo). E como o raio é perpendicular à tangente, o eixo é chamado de eixo da normal (perpendicular e normal são a mesma coisa). O ort deste eixo não é mais denotado j, uma n. O terceiro eixo (o antigo Z) é perpendicular aos dois anteriores. Este é um binormal com um vetor b(Fig. 12, à direita). Aliás, neste caso sistema de coordenadas retangulares muitas vezes referido como "natural" ou natural.
Definição Uma coleção ordenada (x 1 , x 2 , ... , x n) n de números reais é chamada vetor n-dimensional, e os números x i (i = ) - componentes ou coordenadas,
Exemplo. Se, por exemplo, uma certa fábrica de automóveis tem que produzir 50 carros, 100 caminhões, 10 ônibus, 50 conjuntos de peças de reposição para carros e 150 conjuntos para caminhões e ônibus por turno, então o programa de produção dessa fábrica pode ser escrito como um vetor (50, 100, 10, 50, 150), que tem cinco componentes.
Notação. Os vetores são indicados por letras minúsculas em negrito ou letras com uma barra ou seta na parte superior, por exemplo, uma ou. Os dois vetores são chamados igual se eles têm o mesmo número de componentes e seus componentes correspondentes são iguais.
Componentes vetoriais não podem ser trocados, por exemplo (3, 2, 5, 0, 1) e (2, 3, 5, 0, 1) vetores diferentes.
Operações em vetores. trabalhar
x= (x 1 , x 2 , ... ,x n) para um número realλ chamado vetorλ x= (λ x 1 , λ x 2 , ... , λ x n).
somax= (x 1 , x 2 , ... , x n) e y= (y 1 , y 2 , ... ,y n) é chamado de vetor x+y= (x 1 + y 1 , x 2 + y 2 , ... , x n + + y n).
O espaço dos vetores. N -espaço vetorial dimensional R n é definido como o conjunto de todos os vetores n-dimensionais para os quais são definidas as operações de multiplicação por números reais e adição.
Ilustração econômica. Uma ilustração econômica de um espaço vetorial n-dimensional: espaço de mercadorias (bens). Debaixo mercadoria entenderemos algum bem ou serviço que foi colocado à venda em um determinado momento em um determinado local. Suponha que haja um número finito de bens disponíveis n; as quantidades de cada um deles compradas pelo consumidor são caracterizadas por um conjunto de bens
x= (x 1 , x 2 , ..., x n),
onde x i denota a quantidade do i-ésimo bem adquirido pelo consumidor. Vamos supor que todos os bens têm a propriedade de divisibilidade arbitrária, de modo que qualquer quantidade não negativa de cada um deles pode ser comprada. Então todos os conjuntos possíveis de bens são vetores do espaço de bens C = ( x= (x 1 , x 2 , ... , x n) x i ≥ 0, i = ).
Independência linear.
Sistema e 1 , e 2 , ... , e m vetores n-dimensionais é chamado linearmente dependente se existem esses númerosλ 1 , λ 2 , ... , λ m , dos quais pelo menos um é diferente de zero, o que satisfaz a igualdadeλ1 e 1 + λ2 e 2+...+λm e m = 0; caso contrário, esse sistema de vetores é chamado Linearmente independente, ou seja, essa igualdade só é possível no caso em que todos ![]() . O significado geométrico da dependência linear de vetores em R 3 , interpretados como segmentos direcionados, explicam os seguintes teoremas.
. O significado geométrico da dependência linear de vetores em R 3 , interpretados como segmentos direcionados, explicam os seguintes teoremas.
Teorema 1. Um sistema que consiste em um único vetor é linearmente dependente se e somente se esse vetor for zero.
Teorema 2. Para que dois vetores sejam linearmente dependentes, é necessário e suficiente que sejam colineares (paralelos).
Teorema 3 . Para que três vetores sejam linearmente dependentes, é necessário e suficiente que sejam coplanares (coloquem-se no mesmo plano).
Triplos à esquerda e à direita de vetores. Um triplo de vetores não coplanares a, b, c chamado direita, se o observador de sua origem comum ignorar as extremidades dos vetores a, b, c nessa ordem parece prosseguir no sentido horário. Por outro lado a, b, c -triplo esquerdo. Todos os triplos à direita (ou à esquerda) de vetores são chamados igualmente orientado.
Base e coordenadas. Troika e 1, e 2 , e 3 vetores não coplanares em R 3 chamado base, e os próprios vetores e 1, e 2 , e 3 - básico. Qualquer vetor uma pode ser expandido de forma única em termos de vetores de base, ou seja, pode ser representado na forma
uma= x 1 e 1 + x2 e 2 + x 3 e 3, (1.1)
os números x 1 , x 2 , x 3 em expansão (1.1) são chamados coordenadasuma na base e 1, e 2 , e 3 e são indicados uma(x1, x2, x3).
Base ortonormal. Se os vetores e 1, e 2 , e 3 são perpendiculares aos pares e o comprimento de cada um deles é igual a um, então a base é chamada ortonormal, e as coordenadas x 1 , x 2 , x 3 - retangular. Os vetores de base de uma base ortonormal serão denotados eu, j, k.
Vamos supor que no espaço R 3 o sistema direito de coordenadas retangulares cartesianas (0, eu, j, k}.
Produto vetorial. arte vetorial uma por vetor b chamado vetor c, que é determinado pelas três condições a seguir:
1. Comprimento do vetor c numericamente igual à área do paralelogramo construído sobre os vetores uma e b, ou seja
c=
|a||b| pecado( uma^b).
2. Vetor c perpendicular a cada um dos vetores uma e b.
3. Vetores uma, b e c, tomados nessa ordem, formam um triplo à direita.
Para produto vetorial c a designação é introduzida c=[ab] ou
c = um
× b.
Se os vetores uma e b são colineares, então sin( a^b) = 0 e [ ab] = 0, em particular, [ aa] = 0. Produtos vetoriais de sobras: [ eu j]=k, [jk] = eu, [ki]=j.
Se os vetores uma e b dado na base eu, j, k coordenadas uma(a 1 , a 2 , a 3), b(b 1 , b 2 , b 3), então

Trabalho misto. Se o produto vetorial de dois vetores uma e b escalar multiplicado pelo terceiro vetor c, então esse produto de três vetores é chamado produto misto e é indicado pelo símbolo uma a.C.
Se os vetores a, b e c na base eu, j, k definido por suas coordenadas
uma(a 1 , a 2 , a 3), b(b1, b2, b3), c(c 1 , c 2 , c 3), então
 .
.
O produto misto tem uma interpretação geométrica simples - é um escalar, em valor absoluto igual ao volume de um paralelepípedo construído sobre três vetores dados.
Se os vetores formam um triplo reto, então seu produto misto é um número positivo igual ao volume indicado; se os três a, b, c - esquerda, então a b c<0 и V = - a b c, portanto V =|a b c|.
Supõe-se que as coordenadas dos vetores encontrados nos problemas do primeiro capítulo sejam dadas em relação à base ortonormal à direita. Vetor de unidade codirecional para vetor uma, indicado pelo símbolo uma cerca de. Símbolo r=OM denotado pelo vetor raio do ponto M, os símbolos a, AB ou|a|, | AB |os módulos de vetores são denotados uma e AB.
Exemplo 1.2. Encontre o ângulo entre os vetores uma= 2m+4n e b= m-n, Onde m e n- vetores unitários e ângulo entre m e n igual a 120 o.
Decisão. Temos: cos φ = ab/ab, ab=(2m+4n) (m-n) = 2m 2 - 4n 2 +2mn=
= 2 - 4+2cos120 o = - 2 + 2(-0,5) = -3; a = ; uma 2 = (2m+4n) (2m+4n) =
= 4m 2 +16mn+16n 2 = 4+16(-0,5)+16=12, então a = . b= ; b 2 =
= (m-n)(m-n) = m 2 -2mn+n 2 =
1-2(-0,5)+1 = 3, então b = . Finalmente temos: cosφ \u003d -1/2, φ \u003d 120 o.
Exemplo 1.3.Conhecendo vetores AB(-3,-2,6) e BC(-2,4,4), calcule a altura AD do triângulo ABC.
Decisão. Denotando a área do triângulo ABC por S, temos:
S = 1/2 a.C. AD. Então AD=2S/BC, BC== ![]() = 6,
= 6,
S = 1/2| AB ×CA |.
AC=AB+BC, então o vetor CA tem coordenadas
.
.
Exemplo 1.4 . Dados dois vetores uma(11,10,2) e b(4,0,3). Encontre o vetor unitário c, ortogonal aos vetores uma e b e dirigido de modo que o triplo ordenado de vetores a, b, c estava certo.
Decisão.Vamos denotar as coordenadas do vetor c em relação à base ortonormal à direita dada em termos de x, y, z.
Na medida em que c ⊥ a, c ⊥b, então ca= 0, cb= 0. Pela condição do problema, é necessário que c = 1 e a b c >0.
Temos um sistema de equações para encontrar x,y,z: 11x +10y + 2z = 0, 4x+3z=0, x 2 + y 2 + z 2 = 0.
Da primeira e segunda equações do sistema obtemos z = -4/3 x, y = -5/6 x. Substituindo yez na terceira equação, teremos: x 2 = 36/125, de onde
x=±
. Usando condição a b c > 0, obtemos a desigualdade

Levando em conta as expressões para z e y, reescrevemos a desigualdade resultante na forma: 625/6 x > 0, de onde segue que x>0. Então x = , y = - , z = - .
Definição. O produto vetorial de um vetor a (multiplicador) por um vetor (multiplicador) que não é colinear com ele é o terceiro vetor c (produto), que é construído da seguinte forma:
1) seu módulo é numericamente igual a área paralelogramo na Fig. 155), construída sobre vetores, ou seja, é igual à direção perpendicular ao plano do referido paralelogramo;
3) neste caso, a direção do vetor c é escolhida (entre duas possíveis) para que os vetores c formem um sistema destro (§ 110).
Designação: ou
Adenda à definição. Se os vetores são colineares, então considerando a figura como um paralelogramo (condicionalmente), é natural atribuir área zero. Então o produto vetorial vetores colinearesé considerado igual ao vetor nulo.

Como o vetor nulo pode ser atribuído a qualquer direção, essa convenção não contradiz os itens 2 e 3 da definição.
Observação 1. No termo "produto vetorial", a primeira palavra indica que o resultado da ação é um vetor (em oposição a produto escalar; cf. § 104, observação 1).
Exemplo 1. Encontre o produto vetorial onde os principais vetores do sistema de coordenadas à direita (Fig. 156).
1. Como os comprimentos dos vetores principais são iguais à unidade de escala, a área do paralelogramo (quadrado) é numericamente igual a um. Portanto, o módulo do produto vetorial é igual a um.
2. Como a perpendicular ao plano é o eixo, o produto vetorial desejado é um vetor colinear ao vetor k; e como ambos têm módulo 1, o produto vetorial requerido é k ou -k.
3. Destes dois vetores possíveis, deve-se escolher o primeiro, pois os vetores k formam um sistema direito (e os vetores formam um sistema esquerdo).
Exemplo 2. Encontre o produto vetorial
Decisão. Como no exemplo 1, concluímos que o vetor é k ou -k. Mas agora precisamos escolher -k, já que os vetores formam o sistema direito (e os vetores formam o esquerdo). Então,
Exemplo 3 Os vetores têm comprimentos de 80 e 50 cm, respectivamente, e formam um ângulo de 30°. Tomando um metro como unidade de comprimento, encontre o comprimento do produto vetorial a

Decisão. A área de um paralelogramo construído em vetores é igual a O comprimento do produto vetorial desejado é igual a
Exemplo 4. Encontre o comprimento do produto vetorial dos mesmos vetores, tomando um centímetro como unidade de comprimento.
Decisão. Como a área do paralelogramo construído em vetores é igual ao comprimento do produto vetorial é 2000 cm, ou seja,
Da comparação dos exemplos 3 e 4, pode-se ver que o comprimento do vetor depende não apenas dos comprimentos dos fatores, mas também da escolha da unidade de comprimento.
significado físico produto vetorial. Dos numerosos quantidades físicas, representado por um produto vetorial, considere apenas o momento da força.
Seja A o ponto de aplicação da força. O momento da força em relação ao ponto O é chamado de produto vetorial. Como o módulo desse produto vetorial é numericamente igual à área do paralelogramo (Fig. 157), o módulo do momento é igual ao produto da base pela altura, ou seja, a força multiplicada pela distância do ponto O até a reta ao longo da qual a força atua.
Em mecânica, está provado que para o equilíbrio de um corpo rígido é necessário que não apenas a soma dos vetores que representam as forças aplicadas ao corpo, mas também a soma dos momentos das forças seja igual a zero. No caso em que todas as forças são paralelas ao mesmo plano, a adição dos vetores que representam os momentos pode ser substituída pela adição e subtração de seus módulos. Mas para direções arbitrárias de forças, tal substituição é impossível. De acordo com isso, o produto vetorial é definido precisamente como um vetor, e não como um número.

