Predtým, ako uvedieme pojem vektorového súčinu, prejdime k otázke orientácie usporiadanej trojice vektorov a → , b → , c → v trojrozmernom priestore.
Na začiatok odložme vektory a → , b → , c → z jedného bodu. Orientácia trojice a → , b → , c → je pravá alebo ľavá v závislosti od smeru vektora c → . Zo smeru, v ktorom je najkratší obrat z vektora a → do b → od konca vektora c → , sa určí tvar trojice a → , b → , c →.
Ak je najkratšia rotácia proti smeru hodinových ručičiek, potom sa nazýva trojica vektorov a → , b → , c → správny ak v smere hodinových ručičiek - vľavo.
Ďalej zoberte dva nekolineárne vektory a → a b → . Odložme potom vektory A B → = a → a A C → = b → z bodu A. Zostrojme vektor A D → = c → , ktorý je súčasne kolmý na A B → aj A C → . Pri konštrukcii vektora A D → = c → teda môžeme urobiť dve veci a dať mu buď jeden smer alebo opačný (pozri obrázok).

Usporiadaná trojica vektorov a → , b → , c → môže byť, ako sme zistili, pravá alebo ľavá v závislosti od smeru vektora.
Z vyššie uvedeného môžeme zaviesť definíciu vektorového súčinu. Táto definícia uvedené pre dva vektory definované v pravouhlý systém súradnice trojrozmerný priestor.
Definícia 1
Vektorový súčin dvoch vektorov a → a b → budeme volať taký vektor daný v pravouhlom súradnicovom systéme trojrozmerného priestoru tak, že:
- ak sú vektory a → a b → kolineárne, bude to nula;
- bude kolmá na vektor a → aj vektor b → t.j. ∠ a → c → = ∠ b → c → = π 2 ;
- jeho dĺžka je určená vzorcom: c → = a → b → sin ∠ a → , b → ;
- trojica vektorov a → , b → , c → má rovnakú orientáciu ako daný súradnicový systém.
vektorový produkt vektory a → a b → majú nasledujúci zápis: a → × b → .
Súradnice krížových produktov
Keďže každý vektor má v súradnicovom systéme určité súradnice, je možné zaviesť druhú definíciu krížového súčinu, ktorá vám umožní nájsť jeho súradnice z daných súradníc vektorov.
Definícia 2
V pravouhlom súradnicovom systéme trojrozmerného priestoru vektorový súčin dvoch vektorov a → = (a x ; a y ; a z) a b → = (b x ; b y ; b z) vektor nazývame c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → , kde i → , j → , k → sú súradnicové vektory.
Vektorový súčin môže byť reprezentovaný ako determinant štvorcovú maticu tretieho rádu, kde prvý riadok sú vektory i → , j → , k → , druhý riadok obsahuje súradnice vektora a → a tretí riadok obsahuje súradnice vektora b → v danej pravouhlej súradnici. systém, tento maticový determinant vyzerá takto: c → = a → × b → = i → j → k → a x a y a z b x b y b z
Rozšírením tohto determinantu o prvky prvého riadku dostaneme rovnosť: c → = a → × b → = i → j → k → a x a y a z b x b y b z = a y a z b y b z i → - a x a z b x b z j → + a x a y b x b y k → = = ( a → × b → a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →
Vlastnosti krížových produktov
Je známe, že vektorový súčin v súradniciach je reprezentovaný ako determinant matice c → = a → × b → = i → j → k → a x a y a z b x b y b z , potom na zákl. vlastnosti determinantu matrice nasledujúci Vlastnosti vektorového produktu:
- antikomutatívnosť a → × b → = - b → × a → ;
- distributivita a (1) → + a (2) → × b = a (1) → × b → + a (2) → × b → alebo a → × b (1) → + b (2) → = a → × b (1) → + a → × b (2) → ;
- asociativita λ a → × b → = λ a → × b → alebo a → × (λ b →) = λ a → × b → , kde λ je ľubovoľné reálne číslo.
Tieto vlastnosti nemajú zložité dôkazy.
Môžeme napríklad dokázať antikomutatívnosť vektorového súčinu.
Dôkaz antikomutatívnosti
Podľa definície a → × b → = i → j → k → a x a y a z b x b y b z a b → × a → = i → j → k → b x b y b z a x a y a z . A ak sa vymenia dva riadky matice, potom by sa hodnota determinantu matice mala zmeniť na opačnú, teda a → × b → = i → j → k → a x a y a z b x b y b z = - i → j → k → b x b y b z a x a y a z = - b → × a → , čo a dokazuje antikomutatívnosť vektorového súčinu.
Vektorový produkt – príklady a riešenia
Vo väčšine prípadov ide o tri typy úloh.
V úlohách prvého typu sa zvyčajne udávajú dĺžky dvoch vektorov a uhol medzi nimi, ale musíte nájsť dĺžku krížového produktu. V tomto prípade použite nasledujúci vzorec c → = a → b → sin ∠ a → , b → .
Príklad 1
Nájdite dĺžku krížového súčinu vektorov a → a b → ak je známe a → = 3 , b → = 5 , ∠ a → , b → = π 4 .
rozhodnutie
Pomocou definície dĺžky vektorového súčinu vektorov a → a b → riešime túto úlohu: a → × b → = a → b → sin ∠ a → , b → = 3 5 sin π 4 = 15 2 2 .
odpoveď: 15 2 2 .
Úlohy druhého typu majú súvislosť so súradnicami vektorov, obsahujú vektorový súčin, jeho dĺžku atď. prehľadaný známe súradnice dané vektory a → = (a x ; a y ; a z) a b → = (b x ; b y ; b z) .
Pre tento typ úloh môžete vyriešiť veľa možností úloh. Napríklad nie súradnice vektorov a → a b → , ale ich expanzie v zmysle súradnicové vektory milý b → = b x i → + b y j → + b z k → a c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → , alebo vektory a → a b → môžu byť dané súradnicami ich počiatočné a koncové body.
Zvážte nasledujúce príklady.
Príklad 2
Dva vektory sú nastavené v pravouhlom súradnicovom systéme a → = (2 ; 1 ; - 3) , b → = (0 ; - 1 ; 1) . Nájdite ich vektorový produkt.
rozhodnutie
Podľa druhej definície nájdeme vektorový súčin dvoch vektorov v dané súradnice: a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → = = (1 1 - (- 3) (- 1)) i → + (( - 3) 0 - 2 1) j → + (2 (- 1) - 1 0) k → = = - 2 i → - 2 j → - 2 k → .
Ak krížový súčin napíšeme z hľadiska maticového determinantu, potom riešenie tento príklad vyzerá takto: a → × b → = i → j → k → a x a y a z b x b y b z = i → j → k → 2 1 - 3 0 - 1 1 = - 2 i → - 2 j → - 2 k → .
odpoveď: a → × b → = - 2 i → - 2 j → - 2 k → .
Príklad 3
Nájdite dĺžku krížového súčinu vektorov i → - j → a i → + j → + k → , kde i → , j → , k → - orty pravouhlého karteziánskeho súradnicového systému.
rozhodnutie
Najprv nájdime súradnice daného vektorového súčinu i → - j → × i → + j → + k → v danom pravouhlom súradnicovom systéme.
Je známe, že vektory i → - j → a i → + j → + k → majú súradnice (1 ; - 1 ; 0) a (1 ; 1; 1). Nájdite dĺžku vektorového súčinu pomocou maticového determinantu, potom máme i → - j → × i → + j → + k → = i → j → k → 1 - 1 0 1 1 1 = - i → - j → + 2 k → .
Preto vektorový súčin i → - j → × i → + j → + k → má súradnice (- 1 ; - 1 ; 2) v danom súradnicovom systéme.
Dĺžku vektorového súčinu zistíme podľa vzorca (pozri časť o zisťovaní dĺžky vektora): i → - j → × i → + j → + k → = - 1 2 + - 1 2 + 2 2 = 6.
odpoveď: i → - j → × i → + j → + k → = 6 . .
Príklad 4
V obdĺžnikovom karteziánsky systém súradnice sú súradnice troch bodov A (1, 0, 1), B (0, 2, 3) , C (1, 4, 2). Nájdite nejaký vektor kolmý na A B → a A C → súčasne.
rozhodnutie
Vektory A B → a AC → majú nasledujúce súradnice (-1; 2; 2) a (0; 4; 1). Keď sme našli vektorový súčin vektorov A B → a A C → , je zrejmé, že ide o kolmý vektor podľa definície k A B → aj A C → , to znamená, že je riešením nášho problému. Nájdite to A B → × A C → = i → j → k → - 1 2 2 0 4 1 = - 6 i → + j → - 4 k → .
odpoveď: - 6 i → + j → - 4 k → . je jedným z kolmých vektorov.
Problémy tretieho typu sú zamerané na využitie vlastností vektorového súčinu vektorov. Po jeho aplikácii získame riešenie daného problému.
Príklad 5
Vektory a → a b → sú kolmé a ich dĺžky sú 3 a 4. Nájdite dĺžku krížového produktu 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b → .
rozhodnutie
Vlastnosťou distributivity vektorového súčinu môžeme napísať 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × - 2 b →
Vlastnosťou asociatívnosti vyberáme číselné koeficienty za znamienkom vektorových súčinov v poslednom výraze: 3 a → × a → + 3 a → × - 2 b → + - b → × a → + - b → × × - 2 b → = = 3 a → × a → + 3 (- 2) a → × b → + (- 1) b → × a → + (- 1) (- 2) b → × b → = = 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b →
Vektorové produkty a → × a → a b → × b → sa rovnajú 0, pretože a → × a → = a → a → sin 0 = 0 a b → × b → = b → b → sin 0 = 0 , potom 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b → = - 6 a → × b → - b → × a → . .
Z antikomutatívnosti vektorového súčinu vyplýva - 6 a → × b → - b → × a → = - 6 a → × b → - (- 1) a → × b → = - 5 a → × b → . .
Pomocou vlastností vektorového súčinu získame rovnosť 3 · a → - b → × a → - 2 · b → = = - 5 · a → × b → .
Podľa podmienky sú vektory a → a b → kolmé, to znamená, že uhol medzi nimi je rovný π 2 . Teraz zostáva len nahradiť nájdené hodnoty do zodpovedajúcich vzorcov: 3 a → - b → × a → - 2 b → = - 5 a → × b → = = = 5 a → × b → = 5 a → b → hriech (a →, b →) = 5 3 4 sin π 2 = 60.
odpoveď: 3 a → - b → × a → - 2 b → = 60 .
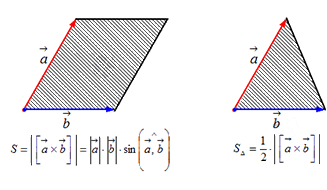
Dĺžka krížového súčinu vektorov je podľa definície a → × b → = a → · b → · sin ∠ a → , b → . Keďže je už známe (od školský kurz), že plocha trojuholníka je polovicou súčinu dĺžok jeho dvoch strán vynásobených sínusom uhla medzi danými stranami. Preto sa dĺžka vektorového súčinu rovná ploche rovnobežníka - zdvojeného trojuholníka, konkrétne súčinu strán vo forme vektorov a → a b → , odložených z jedného bodu sínusom. uhla medzi nimi sin ∠ a → , b → .
Tak to je geometrický význam vektorový produkt.
Fyzikálny význam vektorového produktu
V mechanike, jednom z odvetví fyziky, môžete vďaka vektorovému súčinu určiť moment sily vzhľadom na bod v priestore.
Definícia 3
Pod momentom sily F → , pôsobiacim na bod B , relatívne k bodu A budeme rozumieť nasledujúci vektorový súčin A B → × F → .
Ak si všimnete chybu v texte, zvýraznite ju a stlačte Ctrl+Enter
7.1. Definícia krížového produktu
Tri nekoplanárne vektory a, b a c v uvedenom poradí tvoria pravú trojicu, ak od konca tretieho vektora c najkratšiu odbočku z prvého vektora a do druhého vektora b vidíme proti smeru hodinových ručičiek a ľavý v smere hodinových ručičiek (pozri obr. . šestnásť).
Vektorový súčin vektora a a vektora b sa nazýva vektor c, ktorý:
1. Kolmo na vektory a a b, teda c ^ a a c ^ b;
2. Má dĺžku, ktorá sa číselne rovná ploche rovnobežníka postaveného na vektoroch a ab ako na bokoch (pozri obr. 17), t.j.
3. Vektory a , b a c tvoria pravú trojicu.


Vektorový súčin je označený a x b alebo [a,b]. Z definície vektorového produktu priamo vyplývajú nasledujúce vzťahy medzi orts, j a k(pozri obr. 18):
i x j \u003d k, j x k \u003d i, k x i \u003d j.
Dokážme to napríklad i xj \u003d k.
1) k ^ i , k ^ j;
2) |k |=1, ale | i x j| = |i | |J| sin(90°)=1;
3) vektory i, ja k tvoria pravú trojicu (pozri obr. 16).
7.2. Vlastnosti krížových produktov
1. Pri preusporiadaní faktorov vektorový súčin zmení znamienko, t.j. a xb \u003d (b xa) (pozri obr. 19).
Vektory a xb a b xa sú kolineárne, majú rovnaké moduly (plocha rovnobežníka zostáva nezmenená), ale sú opačne orientované (trojice a, b a xb a a, b, b x a opačnej orientácie). To jest axb = -(bxa).
2. Vektorový súčin má asociatívna vlastnosť vzhľadom na skalárny faktor, t.j. l (a xb) \u003d (la) x b \u003d a x (l b).

Nech l >0. Vektor l (a xb) je kolmý na vektory a a b. vektor ( l a) x b je tiež kolmá na vektory a a b(vektory a, l ale ležia v rovnakej rovine). Takže vektory l(a xb) a ( l a) x b kolineárne. Je zrejmé, že ich smery sa zhodujú. Majú rovnakú dĺžku:
Takže l(a xb)= l a xb. Dokazuje sa to podobne aj pre l<0.
3. Dva nenulové vektory a a b sú kolineárne vtedy a len vtedy, ak sa ich vektorový súčin rovná nulovému vektoru, t.j. a ||b<=>a xb \u003d 0.

Konkrétne i*i=j*j=k*k=0.
4. Vektorový súčin má distribučnú vlastnosť:
(a+b) xs = a xs + b xs .
Prijať bez dôkazu.
7.3. Vyjadrenie krížového produktu z hľadiska súradníc
Použijeme vektorovú tabuľku krížových produktov i , j a k:

ak sa smer najkratšej cesty z prvého vektora do druhého zhoduje so smerom šípky, potom sa súčin rovná tretiemu vektoru, ak sa nezhoduje, tretí vektor sa berie so znamienkom mínus.
Nech dva vektory a =a x i +a y j+az k a b=bx i+ podľa j+bz k. Nájdite vektorový súčin týchto vektorov ich vynásobením ako polynómy (podľa vlastností vektorového súčinu):

![]()
Výsledný vzorec možno napísať ešte kratšie:

keďže pravá strana rovnosti (7.1) zodpovedá rozšíreniu determinantu tretieho rádu z hľadiska prvkov prvého radu Rovnosť (7.2) je ľahko zapamätateľná.
7.4. Niektoré aplikácie krížového produktu
Stanovenie kolinearity vektorov

Nájdenie oblasti rovnobežníka a trojuholníka
Podľa definície krížového súčinu vektorov a a b |a xb | =| a | * |b |sin g , teda S par = |a x b |. A preto D S \u003d 1/2 | a x b |.
Určenie momentu sily okolo bodu
Nech v bode A pôsobí sila F = AB nechaj to tak O- nejaký bod v priestore (pozri obr. 20).

Z fyziky je známe, že krútiaci moment F vzhľadom na bod O nazývaný vektor M , ktorý prechádza cez bod O a:
1) kolmá na rovinu prechádzajúcu bodmi O, A, B;
2) číselne sa rovná súčinu sily a ramena
3) tvorí pravú trojicu s vektormi OA a A B .
Preto M \u003d OA x F.
Nájdenie lineárnej rýchlosti otáčania
Rýchlosť v body M pevné telo, rotujúce uhlovou rýchlosťou w okolo pevnej osi, je určený Eulerovým vzorcom v \u003d w x r, kde r \u003d OM, kde O je nejaký pevný bod osi (pozri obr. 21).

Jednotkový vektor- Toto vektor, ktorého absolútna hodnota (modul) sa rovná jednej. Na označenie jednotkového vektora použijeme dolný index e. Ak je teda daný vektor a, potom jeho jednotkovým vektorom bude vektor a e) Tento jednotkový vektor ukazuje rovnakým smerom ako samotný vektor a a jeho modul sa rovná jednej, to znamená ae \u003d 1.
samozrejme, a= a a e (a - vektorový modul a). Vyplýva to z pravidla, podľa ktorého sa vykonáva operácia násobenia skaláru vektorom.
Jednotkové vektoryčasto spojené so súradnicovými osami súradnicového systému (najmä s osami karteziánskeho súradnicového systému). Smery týchto vektory sa zhodujú so smermi zodpovedajúcich osí a ich počiatky sú často kombinované s počiatkom súradnicového systému.
Dovoľte mi, aby som vám to pripomenul Kartézsky súradnicový systém v priestore sa tradične nazýva trojica vzájomne kolmých osí pretínajúcich sa v bode nazývanom počiatok. Súradnicové osi sa zvyčajne označujú písmenami X, Y, Z a nazývajú sa os x, zvislá os a os aplikácie. Samotný Descartes použil iba jednu os, na ktorej boli vynesené úsečky. zásluhou používania systémov sekery patrí jeho žiakom. Preto tá veta Kartézsky súradnicový systém historicky nesprávne. Radšej sa porozprávaj pravouhlý súradnicový systém alebo ortogonálny súradnicový systém. Napriek tomu nezmeníme tradície a v budúcnosti budeme predpokladať, že kartézsky a pravouhlý (ortogonálny) súradnicový systém sú jedno a to isté.
Jednotkový vektor, nasmerovaný pozdĺž osi X, je označený i, jednotkový vektor, nasmerovaný pozdĺž osi Y, je označený j, a jednotkový vektor, nasmerovaný pozdĺž osi Z, je označený k. vektory i, j, k volal orts(obr. 12, vľavo), majú jednotlivé moduly, tj
i = 1, j = 1, k = 1.
osí a orts pravouhlý súradnicový systém v niektorých prípadoch majú iné názvy a označenia. Takže úsečku X možno nazvať os dotyčnice a jej jednotkový vektor je označený τ (malé grécke písmeno tau), os y je normálna os, jej jednotkový vektor je označený n, os aplikácie je os binormály, označuje sa jej jednotkový vektor b. Prečo meniť mená, ak podstata zostáva rovnaká?
Faktom je, že napríklad v mechanike sa pri štúdiu pohybu telies veľmi často používa pravouhlý súradnicový systém. Ak je teda samotný súradnicový systém nehybný a zmena súradníc pohybujúceho sa objektu je sledovaná v tomto nehybnom systéme, potom zvyčajne osi označujú X, Y, Z a ich orts resp i, j, k.
Ale často, keď sa objekt pohybuje po nejakej krivočiarej trajektórii (napríklad po kruhu), je vhodnejšie zvážiť mechanické procesy v súradnicovom systéme, ktorý sa pohybuje s týmto objektom. Práve pre takýto pohyblivý súradnicový systém sa používajú iné názvy osí a ich jednotkové vektory. Je to len prijaté. V tomto prípade je os X nasmerovaná tangenciálne k trajektórii v bode, kde sa tento objekt práve nachádza. A potom sa táto os už nenazýva os X, ale os dotyčnice a jej jednotkový vektor sa už neoznačuje i, a τ . Os Y smeruje pozdĺž polomeru zakrivenia trajektórie (v prípade pohybu v kruhu - do stredu kruhu). A keďže polomer je kolmý na dotyčnicu, os sa nazýva os normály (kolmica a normála sú to isté). Ort tejto osi už nie je označený j, a n. Tretia os (bývalá Z) je kolmá na dve predchádzajúce. Toto je binormálne s vektorom b(obr. 12, vpravo). Mimochodom, v tomto prípade pravouhlý súradnicový systémčasto označované ako „prírodné“ alebo prirodzené.
Definícia Usporiadaná zbierka (x 1 , x 2 , ... , x n) n reálnych čísel sa nazýva n-rozmerný vektor a čísla x i (i = ) - komponentov alebo súradnice,
Príklad. Ak má napríklad určitá automobilka za zmenu vyrobiť 50 osobných automobilov, 100 nákladných áut, 10 autobusov, 50 súprav náhradných dielov na osobné autá a 150 súprav na nákladné autá a autobusy, potom výrobný program tohto závodu možno napísať ako vektor (50, 100, 10, 50, 150), ktorý má päť zložiek.
Notový zápis. Vektory sú označené tučnými malými písmenami alebo písmenami s pruhom alebo šípkou v hornej časti, napr. a alebo. Tieto dva vektory sa nazývajú rovný ak majú rovnaký počet komponentov a ich zodpovedajúce komponenty sú rovnaké.
Komponenty vektora nemožno zamieňať, napr. (3, 2, 5, 0, 1) a (2, 3, 5, 0, 1) rôzne vektory.
Operácie na vektoroch. práca
X= (x 1 , x 2 , ... , x n) na reálne čísloλ nazývaný vektorλ X= (Ax1,Ax2,...,Axn).
súčetX= (x 1, x 2, ..., x n) a r= (y 1 , y 2 , ... ,y n) sa nazýva vektor x+y= (x1 + y1, x 2 + y2, ..., x n + + y n).
Priestor vektorov. N -rozmerný vektorový priestor R n je definované ako množina všetkých n-rozmerných vektorov, pre ktoré sú definované operácie násobenia reálnymi číslami a sčítania.
Ekonomická ilustrácia. Ekonomická ilustrácia n-rozmerného vektorového priestoru: priestor tovaru (tovar). Pod tovar budeme rozumieť nejakému tovaru alebo službe, ktoré sa začali predávať v určitom čase na určitom mieste. Predpokladajme, že je k dispozícii konečný počet statkov n; množstvá každého z nich zakúpené spotrebiteľom sú charakterizované súborom tovaru
X= (x 1 , x 2 , ..., x n),
kde x i označuje množstvo i-tého tovaru zakúpeného spotrebiteľom. Budeme predpokladať, že všetky tovary majú vlastnosť ľubovoľnej deliteľnosti, takže je možné kúpiť akékoľvek nezáporné množstvo každého z nich. Potom všetky možné množiny tovarov sú vektormi priestoru tovarov C = ( X= (x 1 , x 2 , ... , x n) x i ≥ 0, i =).
Lineárna nezávislosť.
systém e 1 , e 2 , ... , e m n-rozmerných vektorov sa nazýva lineárne závislé ak sú také číslaλ1, λ2, ..., λm , z ktorých aspoň jeden je nenulový, čo spĺňa rovnosťλ1 e 1 + λ2 e 2+...+λm e m = 0; inak sa tento systém vektorov nazýva lineárne nezávislé, teda táto rovnosť je možná len v prípade, keď všetky ![]() . Geometrický význam lineárnej závislosti vektorov v R 3, interpretované ako smerované segmenty, vysvetlite nasledujúce vety.
. Geometrický význam lineárnej závislosti vektorov v R 3, interpretované ako smerované segmenty, vysvetlite nasledujúce vety.
Veta 1. Systém pozostávajúci z jedného vektora je lineárne závislý práve vtedy, ak je tento vektor nulový.
Veta 2. Aby boli dva vektory lineárne závislé, je potrebné a postačujúce, aby boli kolineárne (paralelné).
Veta 3 . Aby boli tri vektory lineárne závislé, je potrebné a postačujúce, aby boli koplanárne (ležali v rovnakej rovine).
Ľavá a pravá trojica vektorov. Trojica nekoplanárnych vektorov a, b, c volal správny, ak pozorovateľ z ich spoločného pôvodu obchádza konce vektorov a, b, c Zdá sa, že v tomto poradí postupuje v smere hodinových ručičiek. Inak a, b, c -vľavo trojitý. Všetky pravé (alebo ľavé) trojice vektorov sa nazývajú rovnako orientovaný.
Základ a súradnice. Trojka e 1, e 2 , e 3 nekoplanárne vektory v R 3 tzv základ a samotné vektory e 1, e 2 , e 3 - základné. Akýkoľvek vektor a môže byť rozšírený jedinečným spôsobom z hľadiska bázových vektorov, to znamená, že môže byť reprezentovaný vo forme
a= x 1 e 1 + x2 e 2 + x 3 e 3, (1.1)
volajú sa čísla x 1 , x 2 , x 3 v expanzii (1.1). súradnicea v základe e 1, e 2 , e 3 a sú označené a(x 1, x 2, x 3).
Ortonormálny základ. Ak vektory e 1, e 2 , e 3 sú párovo kolmé a dĺžka každého z nich je rovná jednej, potom sa základ nazýva ortonormálny a súradnice x 1 , x 2 , x 3 - pravouhlý. Bázové vektory ortonormálnej bázy budú označené i, j, k.
Budeme predpokladať, že vo vesmíre R 3 pravý systém karteziánskych pravouhlých súradníc (0, i, j, k}.
Vektorový produkt. vektorové umenie a na vektor b nazývaný vektor c, ktorý je určený týmito tromi podmienkami:
1. Dĺžka vektora cčíselne sa rovná ploche rovnobežníka postaveného na vektoroch a a b, t.j.
c=
|a||b| hriech( a^b).
2. Vektor c kolmo na každý z vektorov a a b.
3. Vektory a, b a c, brané v tomto poradí, tvoria pravú trojicu.
Pre vektorový produkt c uvádza sa označenie c=[ab] alebo
c = a
× b.
Ak vektory a a b sú kolineárne, potom hriech( a^b) = 0 a [ ab] = 0, najmä [ aa] = 0. Vektorové produkty orts: [ ij]=k, [jk] = i, [ki]=j.
Ak vektory a a b uvedené v zákl i, j, k súradnice a(a 1, a 2, a 3), b(b1, b2, b3), potom

Zmiešaná práca. Ak krížový súčin dvoch vektorov a a b skalárne vynásobené tretím vektorom c, potom sa takýto súčin troch vektorov nazýva zmiešaný produkt a je označený symbolom a bc.
Ak vektory a, b a c v základe i, j, k nastavené ich súradnicami
a(a 1, a 2, a 3), b(b 1, b 2, b 3), c(c1, c2, c3), potom
 .
.
Zmiešaný produkt má jednoduchú geometrickú interpretáciu - je to skalár, v absolútnej hodnote rovnajúci sa objemu kvádra postaveného na troch daných vektoroch.
Ak vektory tvoria pravú trojicu, potom ich zmiešaný produkt je kladné číslo rovnajúce sa uvedenému objemu; ak tí traja a, b, c - vľavo teda a b c<0 и V = - a b c, teda V =|a b c|.
Predpokladá sa, že súradnice vektorov, s ktorými sa stretávame v úlohách prvej kapitoly, sú dané vzhľadom na správnu ortonormálnu bázu. Jednotkový vektor kosmerný k vektoru a, označené symbolom a o. Symbol r=OM označené vektorom polomeru bodu M, symboly a, AB alebo|a|, | AB |moduly vektorov sú označené a a AB.
Príklad 1.2. Nájdite uhol medzi vektormi a= 2m+4n a b= m-n, kde m a n- jednotkové vektory a uhol medzi nimi m a n rovný 120 o.
rozhodnutie. Máme: cos φ = ab/ab, ab=(2m+4n) (m-n) = 2m 2 - 4n 2 +2mn=
= 2 - 4 + 2cos120 o = -2 + 2 (-0,5) = -3; a = ; a 2 = (2m+4n) (2m+4n) =
= 4m 2 +16mn+16n 2 = 4+16(-0,5)+16=12, takže a = . b= ; b 2 =
= (m-n)(m-n) = m 2 -2mn+n 2 =
1-2(-0,5)+1 = 3, takže b = . Nakoniec tu máme: cosφ \u003d -1/2, φ \u003d 120 o.
Príklad 1.3.Poznanie vektorov AB(-3,-2,6) a pred Kr(-2,4,4), vypočítajte výšku AD trojuholníka ABC.
rozhodnutie. Označením oblasti trojuholníka ABC pomocou S dostaneme:
S = 1/2 pred Kr. Potom AD=2S/BC, BC== ![]() = 6,
= 6,
S = 1/2| AB ×AC |.
AC=AB+BC, teda vektor AC má súradnice
.
.
Príklad 1.4 . Dané dva vektory a(11,10,2) a b(4,0,3). Nájdite jednotkový vektor c, ortogonálne k vektorom a a b a nasmerované tak, aby usporiadaná trojica vektorov a, b, c mal pravdu.
rozhodnutie.Označme súradnice vektora c vzhľadom na daný pravý ortonormálny základ v zmysle x, y, z.
Pokiaľ ide o c ⊥ a, c ⊥b, potom cca= 0, cb= 0. Podľa podmienky problému sa vyžaduje, aby c = 1 a a b c >0.
Na nájdenie x,y,z máme sústavu rovníc: 11x +10y + 2z = 0, 4x+3z=0, x 2 + y 2 + z 2 = 0.
Z prvej a druhej rovnice sústavy dostaneme z = -4/3 x, y = -5/6 x. Dosadením y a z do tretej rovnice budeme mať: x 2 = 36/125, odkiaľ
x=±
. Použitie podmienky a b c > 0, dostaneme nerovnosť

S prihliadnutím na výrazy pre z a y prepíšeme výslednú nerovnosť v tvare: 625/6 x > 0, z čoho vyplýva, že x>0. Takže x =, y = -, z = -.
Definícia. Vektorový súčin vektora a (násobiteľa) vektorom (násobiteľom), ktorý s ním nie je kolineárny, je tretí vektor c (súčin), ktorý je skonštruovaný takto:
1) jeho modul je číselný rovná ploche rovnobežník na obr. 155), postavený na vektoroch, t. j. rovná sa smeru kolmému na rovinu spomínaného rovnobežníka;
3) smer vektora c sa v tomto prípade volí (z dvoch možných) tak, aby vektory c tvorili pravotočivú sústavu (§ 110).
Označenie: alebo
Dodatok k definícii. Ak sú vektory kolineárne, je prirodzené, že ak berieme obrázok ako (podmienečne) rovnobežník, priradiť nulovú plochu. Takže vektorový produkt kolineárne vektory sa považuje za rovné nulovému vektoru.

Keďže nulovému vektoru možno priradiť akýkoľvek smer, táto konvencia nie je v rozpore s bodmi 2 a 3 definície.
Poznámka 1. Vo výraze „vektorový súčin“ prvé slovo označuje, že výsledkom akcie je vektor (na rozdiel od skalárny súčin; porov. § 104 poznámka 1).
Príklad 1. Nájdite vektorový súčin, kde sú hlavné vektory pravého súradnicového systému (obr. 156).
1. Keďže dĺžky hlavných vektorov sa rovnajú jednotke mierky, plocha rovnobežníka (štvorca) sa číselne rovná jednej. Modul vektorového súčinu sa teda rovná jednej.
2. Keďže kolmica na rovinu je osou, požadovaný vektorový súčin je vektor kolineárny s vektorom k; a keďže obe majú modul 1, požadovaný krížový súčin je buď k alebo -k.
3. Z týchto dvoch možných vektorov treba vybrať prvý, keďže vektory k tvoria pravý systém (a vektory tvoria ľavý).
Príklad 2. Nájdite krížový súčin
rozhodnutie. Ako v príklade 1 sme dospeli k záveru, že vektor je buď k alebo -k. Teraz však musíme zvoliť -k, pretože vektory tvoria pravý systém (a vektory tvoria ľavý). takze
Príklad 3 Vektory majú dĺžku 80 a 50 cm a zvierajú uhol 30°. Ak vezmeme meter ako jednotku dĺžky, nájdite dĺžku vektorového súčinu a

rozhodnutie. Plocha rovnobežníka postaveného na vektoroch sa rovná Dĺžka požadovaného vektorového produktu sa rovná
Príklad 4. Nájdite dĺžku krížového súčinu tých istých vektorov, pričom ako jednotku dĺžky vezmite centimeter.
rozhodnutie. Keďže plocha rovnobežníka postaveného na vektoroch sa rovná dĺžke vektorového súčinu je 2000 cm, t.j.
Porovnanie príkladov 3 a 4 ukazuje, že dĺžka vektora závisí nielen od dĺžok faktorov, ale aj od voľby dĺžkovej jednotky.
fyzický význam vektorový produkt. Z početných fyzikálnych veličín, reprezentovaný vektorovým súčinom, zvážte iba moment sily.
Nech A je bod pôsobenia sily. Moment sily vzhľadom na bod O sa nazýva vektorový súčin. Pretože modul tohto vektorového súčinu sa numericky rovná ploche rovnobežníka (obr. 157), modul momentu sa rovná súčinu základne a výšky, t.j. sily vynásobenej vzdialenosťou od bodu O k priamke, pozdĺž ktorej sila pôsobí.
V mechanike je dokázané, že pre rovnováhu tuhého telesa je potrebné, aby sa nule rovnal nielen súčet vektorov reprezentujúcich sily pôsobiace na teleso, ale aj súčet momentov síl. V prípade, že sú všetky sily rovnobežné s tou istou rovinou, sčítanie vektorov reprezentujúcich momenty môže byť nahradené sčítaním a odčítaním ich modulov. Ale pre svojvoľné smery síl je takáto náhrada nemožná. V súlade s tým je krížový súčin definovaný presne ako vektor a nie ako číslo.

