ទំព័រ 1
ដំណើរការលំយោលនៅក្នុងសៀគ្វីតង់ស្យុងទាបឈប់ដំណើរការរួចទៅហើយក្នុងអំឡុងពេលដំបូងនៃលំយោលប្រេកង់ខ្ពស់ចាប់តាំងពីពាក់កណ្តាលទីពីរនៃរយៈពេលនៃលំយោលទាំងនេះទិសដៅនៃចរន្តប្រែទៅជាផ្ទុយទៅនឹងចរន្តនៅក្នុងសៀគ្វីថាមពល។ ដើម្បីបង្កើនពន្លឺនៃផ្កាភ្លើងនៅក្នុងម៉ាស៊ីនភ្លើង វាអាចធ្វើទៅបានដើម្បីបង្កើនសមត្ថភាពបន្ថែមទៀត។
ដំណើរការ Oscillatory គ្របដណ្តប់វិសាលភាពធំទូលាយនៃបាតុភូតដែលត្រូវបានកំណត់លក្ខណៈដោយពាក្យដដែលៗនៃលក្ខណៈរបស់ពួកគេតាមរយៈ ចន្លោះពេលជាក់លាក់ពេលវេលា។
ដំណើរការ oscillatory កើតឡើងនៅក្នុងប្រព័ន្ធមួយ នៅពេលដែលរួមជាមួយនឹងកម្លាំងដែលនាំវាចេញពីលំនឹង ក៏មានកម្លាំងស្ដារ (ត្រឡប់) ផងដែរ។ តើនឹងមានអ្វីកើតឡើងប្រសិនបើកម្លាំងស្ដារឡើងវិញធ្វើសកម្មភាពលើប្រព័ន្ធដោយមានការពន្យារពេលថេរខ្លះ។ លើសពីនេះទៅទៀតប្រសិនបើអស្ថិរភាពបែបនេះដែលត្រូវបានផ្សារភ្ជាប់ជាមួយនឹងផលប៉ះពាល់នៃការពន្យារពេលគឺមានគ្រោះថ្នាក់ដល់យន្តការស្ថេរភាពរបស់នាវានោះវាមានប្រយោជន៍ក្នុងការអភិវឌ្ឍន៍ម៉ាស៊ីនអេឡិចត្រូនិច។
ដំណើរការ oscillatory ដែលកំណត់ទំហំនៃបន្ទុកថាមវន្តនៅលើកំណាត់សំខាន់កំណត់រូបរាងរបស់ឌីណាម៉ូក្រាមដែលបានកត់ត្រានៅជិតដំបងប៉ូលា។
ដំណើរការ oscillatory នៅក្នុងសៀគ្វីកើតឡើងក្រោមលក្ខខណ្ឌដំបូងដែលមិនសូន្យ។ ចរន្តដំបូងនៅក្នុង inductance x ត្រូវបានកំណត់ដោយការពិចារណាដូចខាងក្រោម។ កុងតាក់ B បំបែកសៀគ្វីនៅពេលដែលចរន្ត tB - i0 - ic ឆ្លងកាត់សូន្យ។
| អន្តរកាលងាយស្រួល - [ រូបភាព ] ការផ្លាស់ប្តូរចរន្តនៅក្នុងសៀគ្វី និងវ៉ុលឆ្លងកាត់ capacitor នៅពេលដែលសៀគ្វីត្រូវបានភ្ជាប់ទៅវា។ |
ដំណើរការ Oscillatory ក៏អាចកើតឡើងនៅក្នុងម៉ាស៊ីនអគ្គិសនី និងការដំឡើងអគ្គិសនីផ្សេងទៀតដែលមានអាំងឌុចទ័រ និងម៉ាស់បង្វិលសំខាន់ៗ នៅពេលបើក បិទ និងបើក។ ការផ្លាស់ប្តូរយ៉ាងខ្លាំងរបៀបប្រតិបត្តិការ។ នៅក្រោមលក្ខខណ្ឌជាក់លាក់មិនសើមទេប៉ុន្តែយោលយោលលេចឡើង។ ការប្រែប្រួលបែបនេះអាចនាំឱ្យមាន ការរំលោភបំពានធ្ងន់ធ្ងរប្រតិបត្តិការនៃការដំឡើងអគ្គិសនី និងសូម្បីតែបង្កឱ្យមានគ្រោះថ្នាក់។ ដូច្នេះនៅពេលបង្កើតប្រព័ន្ធគ្រប់គ្រងសម្រាប់ម៉ាស៊ីនអគ្គិសនី និងការដំឡើងផ្សេងទៀត វាចាំបាច់នៅក្នុងករណីមួយចំនួនដើម្បីអនុវត្តវិធានការពិសេសសម្រាប់ការបន្ថយលឿនបំផុតនៃដំណើរការលំយោល (ណែនាំភាពធន់ទៅក្នុងសៀគ្វីរបស់ពួកគេ។ ល។ ) ។
ដំណើរការ Oscillatory និងព្រំដែនលំយោលនៃស្ថេរភាពផ្សេងៗ ប្រព័ន្ធ nonlinearជាញឹកញាប់អាចត្រូវបានកំណត់ដោយ លីនេអ៊ែរអាម៉ូនិក, គំនិតដែលត្រូវបានផ្តល់ឱ្យខាងលើ។ មានវិធីសាស្រ្តផ្សេងទៀតផងដែរ។ ប្រសិទ្ធភាពបំផុតនៅទីនេះគឺវិធីសាស្ត្រជាលេខ-ក្រាហ្វិកសម្រាប់បង្កើតដំណើរការបណ្តោះអាសន្ន ក៏ដូចជាជាពិសេសវិធីសាស្ត្រនៃការក្លែងធ្វើអគ្គិសនីនៅលើម៉ាស៊ីនគណិតវិទ្យានៃសកម្មភាពបន្ត និងដាច់ពីគ្នា។
ដំណើរការ Oscillatory និងព្រំដែនលំយោលនៃស្ថេរភាពនៃប្រព័ន្ធ nonlinear ជាច្រើនអាចត្រូវបានកំណត់ដោយវិធីសាស្រ្តនៃ linearization អាម៉ូនិក គំនិតដែលត្រូវបានផ្តល់ឱ្យខាងលើ។
ដំណើរការ Oscillatory គឺរីករាលដាលនៅក្នុងធម្មជាតិ និងបច្ចេកវិទ្យា។ ការយោលនៃប៉ោលនៃនាឡិកា រលកលើទឹក ចរន្តអគ្គិសនីឆ្លាស់គ្នា ពន្លឺ សំឡេង គឺជាឧទាហរណ៍នៃការយោលនៃផ្សេងៗ។ បរិមាណរាងកាយ. នៅពេលដែលប៉ោលផ្លាស់ទី កូអរដោនេនៃចំណុចកណ្តាលនៃទំនាញរបស់វាប្រែប្រួល។ ពេលណា ចរន្តឆ្លាស់វ៉ុលនិងចរន្តប្រែប្រួលនៅក្នុងសៀគ្វី។ ដំណើរការទាំងពីរនេះមានគុណភាពខុសគ្នាទាំងស្រុងនៅក្នុងរបស់ពួកគេ។ ធម្មជាតិរាងកាយ. ទោះជាយ៉ាងណាក៏ដោយ ភាពទៀងទាត់បរិមាណនៃដំណើរការទាំងនេះមានច្រើនដូចគ្នា។
ដំណើរការ Oscillatory នៅក្នុងកំណាត់ត្រូវបានបង្កឡើងមិនត្រឹមតែដោយប្រតិបត្តិការនៃឧបករណ៍លើផ្ទៃប៉ុណ្ណោះទេប៉ុន្តែថែមទាំងដោយចលនារបស់ plunger ផងដែរ។ នៅទីនេះ លំយោលសមកាលកម្មគឺគួរឱ្យចង់បានជាង ចាប់តាំងពីនៅក្នុង ករណីនេះពួកគេមិនបណ្តាលឱ្យលើសទម្ងន់។
ដំណើរការ Oscillatory គឺរីករាលដាលនៅក្នុងធម្មជាតិ និងបច្ចេកវិទ្យា។ ការយោលនៃប៉ោលនៃនាឡិកា រលកលើទឹក ចរន្តអគ្គិសនីឆ្លាស់គ្នា ពន្លឺ សំឡេង គឺជាឧទាហរណ៍នៃការយោលនៃបរិមាណរូបវន្តផ្សេងៗ។ នៅពេលដែលប៉ោលផ្លាស់ទី កូអរដោនេនៃចំណុចកណ្តាលនៃទំនាញរបស់វាប្រែប្រួល។ នៅក្នុងករណីនៃចរន្តឆ្លាស់ វ៉ុល និងចរន្តនៅក្នុងសៀគ្វីប្រែប្រួល។ ដំណើរការទាំងពីរនេះមានលក្ខណៈគុណភាពខុសគ្នាទាំងស្រុងនៅក្នុងលក្ខណៈរូបវន្តរបស់វា។ ទោះជាយ៉ាងណាក៏ដោយ ភាពទៀងទាត់បរិមាណនៃដំណើរការទាំងនេះមានច្រើនដូចគ្នា។
រំញ័រដោយឥតគិតថ្លៃនៅក្នុងសៀគ្វី។
សៀគ្វី AC ដែលបានពិចារណានៅក្នុងផ្នែកមុន ៗ បង្ហាញថាធាតុមួយគូ - capacitor និង inductor បង្កើតបានជាប្រព័ន្ធលំយោល។ ឥឡូវនេះយើងនឹងបង្ហាញថានេះពិតជាករណីនេះ នៅក្នុងសៀគ្វីដែលមានតែធាតុទាំងនេះ (រូបភាព 669) សូម្បីតែរំញ័រដោយឥតគិតថ្លៃក៏អាចធ្វើទៅបានដែរ នោះគឺដោយគ្មាន ប្រភពខាងក្រៅ EMF ។
អង្ករ។ ៦៦៩
ដូច្នេះសៀគ្វី (ឬផ្នែកនៃសៀគ្វីផ្សេងទៀត) ដែលមាន capacitor និង inductor ត្រូវបានគេហៅថា សៀគ្វីលំយោល។.
អនុញ្ញាតឱ្យ capacitor ត្រូវបានបញ្ចូលទៅក្នុងបន្ទុក qo ហើយបន្ទាប់មក inductor ភ្ជាប់ទៅវា។ បែបបទបែបនេះអាចត្រូវបានអនុវត្តយ៉ាងងាយស្រួលដោយប្រើសៀគ្វីដែលគ្រោងការណ៍ដែលត្រូវបានបង្ហាញនៅក្នុងរូបភព។ 670: ដំបូងសោត្រូវបានបិទនៅក្នុងទីតាំង 1
ខណៈពេលដែល capacitor ត្រូវបានចោទប្រកាន់ទៅវ៉ុលស្មើនឹង ប្រភព emfបន្ទាប់ពីនោះសោត្រូវបានបោះចូលទៅក្នុងមុខតំណែង 2
បន្ទាប់ពីនោះការហូរចេញនៃ capacitor តាមរយៈឧបករណ៏ចាប់ផ្តើម។ 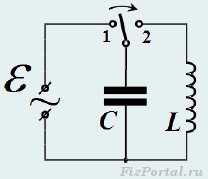
អង្ករ។ ៦៧០
ដើម្បីកំណត់ភាពអាស្រ័យនៃបន្ទុករបស់ capacitor ទាន់ពេលវេលា q(t)អនុវត្តច្បាប់របស់ Ohm យោងទៅតាមវ៉ុលនៅទូទាំង capacitor U C = q/Cស្មើ ការបញ្ចូល EMF ដោយខ្លួនឯង។, កើតឡើងនៅក្នុងឧបករណ៏ 
នៅទីនេះ "បឋម" មានន័យថា ដេរីវេដោយគោរពតាមពេលវេលា។
ដូច្នេះសមីការប្រែទៅជាត្រឹមត្រូវ។ 
សមីការនេះមានមុខងារមិនស្គាល់ពីរ - ការពឹងផ្អែកលើពេលវេលាសាក q(t)និងបច្ចុប្បន្ន ខ្ញុំ(t)ដូច្នេះវាមិនអាចដោះស្រាយបានទេ។ ទោះជាយ៉ាងណាក៏ដោយកម្លាំងបច្ចុប្បន្នគឺជាដេរីវេនៃបន្ទុករបស់ capacitor q / (t) = ខ្ញុំ(t)ដូច្នេះដេរីវេនៃកម្លាំងបច្ចុប្បន្នគឺជាដេរីវេទីពីរនៃបន្ទុក ![]()
ដោយគិតពីទំនាក់ទំនងនេះ យើងសរសេរសមីការ (1) ឡើងវិញក្នុងទម្រង់ 
គួរឱ្យភ្ញាក់ផ្អើល សមីការនេះស្របគ្នាទាំងស្រុងជាមួយនឹងសមីការដែលបានសិក្សាយ៉ាងល្អនៃលំយោលអាម៉ូនិក (ដេរីវេទី 2 នៃអនុគមន៍មិនស្គាល់គឺសមាមាត្រទៅនឹងមុខងារនេះដោយខ្លួនវាផ្ទាល់ជាមួយនឹងមេគុណអវិជ្ជមាននៃសមាមាត្រ។ x // = −ω o 2 x)! ដូច្នេះដំណោះស្រាយចំពោះសមីការនេះនឹងជាមុខងារអាម៉ូនិក
ជាមួយនឹងប្រេកង់រាងជារង្វង់ 
រូបមន្តនេះកំណត់ ប្រេកង់ធម្មជាតិនៃសៀគ្វីលំយោល។. ដូច្នោះហើយរយៈពេលយោលនៃបន្ទុក capacitor (និងកម្លាំងបច្ចុប្បន្ននៅក្នុងសៀគ្វី) គឺស្មើនឹង ![]()
កន្សោមលទ្ធផលសម្រាប់រយៈពេលលំយោលត្រូវបានគេហៅថា រូបមន្តរបស់ J. Thompson.
ជាធម្មតាដើម្បីកំណត់ប៉ារ៉ាម៉ែត្របំពាន ក, φ
ក្នុង ការសម្រេចចិត្តទូទៅ(4) វាចាំបាច់ក្នុងការកំណត់លក្ខខណ្ឌដំបូង - បន្ទុកនិងកម្លាំងបច្ចុប្បន្ននៅក្នុង ពេលដំបូងពេលវេលា។ ជាពិសេសសម្រាប់ឧទាហរណ៍ដែលបានពិចារណានៃសៀគ្វីក្នុងរូបភព។ 670 លក្ខខណ្ឌដំបូងមានទម្រង់៖ នៅ t = 0, q = qo, ខ្ញុំ=0ដូច្នេះការពឹងផ្អែកនៃបន្ទុក capacitor ទាន់ពេលវេលានឹងត្រូវបានពិពណ៌នាដោយមុខងារ
ហើយកម្លាំងបច្ចុប្បន្នប្រែប្រួលទៅតាមពេលវេលាតាមច្បាប់
ការពិចារណាខាងលើនៃសៀគ្វីលំយោលគឺប្រហាក់ប្រហែល - សៀគ្វីពិតប្រាកដណាមួយមានភាពធន់ទ្រាំសកម្ម (ការតភ្ជាប់ខ្សែនិងរបុំរបុំ) ។ 
អង្ករ។ ៦៧១
ដូច្នេះនៅក្នុងសមីការ (1) ការធ្លាក់ចុះតង់ស្យុងឆ្លងកាត់ការតស៊ូសកម្មនេះគួរតែត្រូវបានយកមកពិចារណា ដូច្នេះសមីការនេះនឹងយកទម្រង់ ![]()
ដែលគិតគូរពីទំនាក់ទំនងរវាងបន្ទុក និងកម្លាំងបច្ចុប្បន្នត្រូវបានបំប្លែងទៅជាទម្រង់ 
សមីការនេះក៏ស៊ាំនឹងយើងដែរ - នេះគឺជាសមីការនៃការយោលសើម ![]()
ហើយមេគុណ attenuation ដូចដែលបានរំពឹងទុកគឺសមាមាត្រទៅនឹងភាពធន់ទ្រាំសកម្មនៃសៀគ្វី β = R/L.
ដំណើរការដែលកើតឡើងនៅក្នុង សៀគ្វីលំយោល។អាចត្រូវបានពិពណ៌នាផងដែរដោយប្រើច្បាប់នៃការអភិរក្សថាមពល។ ប្រសិនបើយើងធ្វេសប្រហែសភាពធន់សកម្មនៃសៀគ្វីនោះផលបូកនៃថាមពល វាលអគ្គិសនី capacitor និង វាលម៉ាញេទិក coil នៅតែថេរ ដែលត្រូវបានបញ្ជាក់ដោយសមីការ ![]()
ដែលក៏ជាសមីការនៃលំយោលអាម៉ូនិកជាមួយនឹងប្រេកង់កំណត់ដោយរូបមន្ត (5) ។ នៅក្នុងទម្រង់របស់វា សមីការនេះក៏ស្របគ្នាជាមួយនឹងសមីការខាងក្រោមពីច្បាប់នៃការអភិរក្សថាមពលកំឡុងពេលរំញ័រមេកានិច។ ចាប់តាំងពីសមីការពិពណ៌នាអំពីលំយោល។ បន្ទុកអគ្គិសនី capacitor គឺស្រដៀងគ្នាទៅនឹងសមីការដែលបានពិពណ៌នា រំញ័រមេកានិចបន្ទាប់មកយើងអាចគូរភាពស្រដៀងគ្នារវាងដំណើរការដែលកើតឡើងនៅក្នុងសៀគ្វីលំយោល និងដំណើរការនៅក្នុងណាមួយ ប្រព័ន្ធមេកានិច. នៅលើរូបភព។ 672 ភាពស្រដៀងគ្នានេះត្រូវបានទាញសម្រាប់លំយោល។ ប៉ោលគណិតវិទ្យា. ក្នុងករណីនេះអាណាឡូកគឺ "បន្ទុក capacitor q(t)- មុំផ្លាតប៉ោល φ(ត)" និង "បច្ចុប្បន្ន ខ្ញុំ(t) = q / (t)- ល្បឿនប៉ោល V(t)». 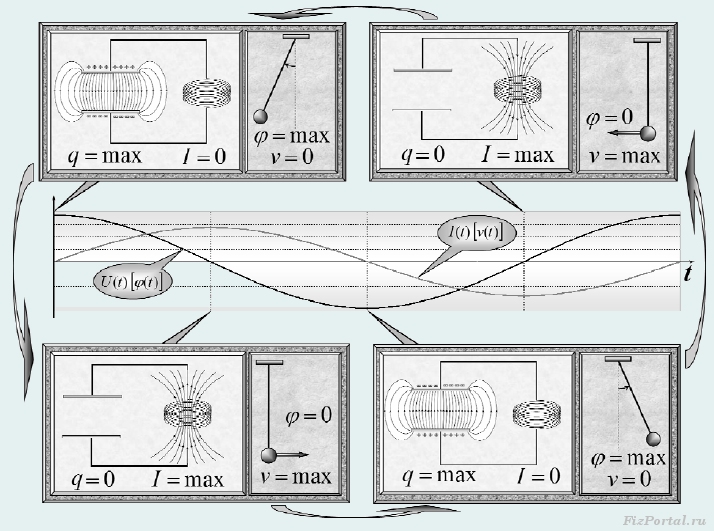
អង្ករ។ ៦៧២
ដោយប្រើភាពស្រដៀងគ្នានេះ យើងពណ៌នាប្រកបដោយគុណភាពអំពីដំណើរការនៃលំយោលបន្ទុក និង ចរន្តអគ្គិសនីនៅក្នុងវណ្ឌវង្ក។ នៅដំណាក់កាលដំបូង capacitor ត្រូវបានគិតថ្លៃ កម្លាំងនៃចរន្តអគ្គិសនីគឺសូន្យ ថាមពលទាំងអស់ត្រូវបានផ្ទុកនៅក្នុងថាមពលនៃវាលអគ្គិសនីរបស់ capacitor (ដែលស្រដៀងទៅនឹងគម្លាតអតិបរមានៃប៉ោលពីលំនឹង។ ទីតាំង)។ បន្ទាប់មក capacitor ចាប់ផ្តើមបញ្ចេញ, កម្លាំងបច្ចុប្បន្នកើនឡើង, ខណៈពេលដែល EMF ដោយខ្លួនឯង induction កើតឡើងនៅក្នុងឧបករណ៏ដែលការពារចរន្តពីការកើនឡើង; ថាមពលរបស់ capacitor ថយចុះ ប្រែទៅជាថាមពលនៃវាលម៉ាញេទិកនៃឧបករណ៏ (ភាពស្រដៀងគ្នា - ប៉ោលផ្លាស់ទីឆ្ពោះទៅរក ចំណុចខាងក្រោមជាមួយនឹងល្បឿនកើនឡើង) ។ នៅពេលដែលការចោទប្រកាន់នៅលើ capacitor ក្លាយជា សូន្យកម្លាំងបច្ចុប្បន្នឈានដល់តម្លៃអតិបរមារបស់វា ខណៈពេលដែលថាមពលទាំងអស់ត្រូវបានបំប្លែងទៅជាថាមពលនៃដែនម៉ាញេទិក (ប៉ោលបានឈានដល់ចំណុចទាបបំផុត ល្បឿនរបស់វាគឺអតិបរមា)។ បន្ទាប់មកវាលម៉ាញេទិកចាប់ផ្តើមថយចុះខណៈពេលដែល EMF អាំងឌុចស្យុងដោយខ្លួនឯងរក្សាចរន្តក្នុងទិសដៅដូចគ្នាខណៈពេលដែល capacitor ចាប់ផ្តើមសាកហើយសញ្ញានៃការចោទប្រកាន់នៅលើចាន capacitor គឺផ្ទុយទៅនឹងការចែកចាយដំបូង (អាណាឡូក - ប៉ោល ផ្លាស់ទីទៅគម្លាតអតិបរមាដំបូងផ្ទុយ) ។ បន្ទាប់មកចរន្តនៅក្នុងសៀគ្វីឈប់ខណៈពេលដែលបន្ទុករបស់ capacitor ម្តងទៀតក្លាយជាអតិបរមាប៉ុន្តែផ្ទុយគ្នានៅក្នុងសញ្ញា (ប៉ោលបានឈានដល់គម្លាតអតិបរមារបស់វា) បន្ទាប់ពីនោះដំណើរការនឹងត្រូវធ្វើម្តងទៀតក្នុងទិសដៅផ្ទុយ។
មេរៀនទី ៨
មេកានិច
ភាពប្រែប្រួល
ចលនា oscillatory ។ លក្ខណៈ Kinematic និងថាមវន្តនៃចលនាលំយោល។ គណិតវិទ្យា រូបវិទ្យា និងប៉ោលនិទាឃរដូវ។
យើងរស់នៅក្នុងពិភពលោកដែលដំណើរការលំយោលគឺជាផ្នែកសំខាន់មួយនៃពិភពលោករបស់យើង ហើយត្រូវបានរកឃើញនៅគ្រប់ទីកន្លែង។
ដំណើរការលំយោល ឬលំយោល គឺជាដំណើរការដែលខុសគ្នាក្នុងកម្រិតមួយ ឬមួយទៀតនៃពាក្យដដែលៗ។
ប្រសិនបើតម្លៃលំយោលធ្វើម្តងទៀតនូវតម្លៃរបស់វានៅចន្លោះពេលទៀងទាត់ នោះលំយោលបែបនេះត្រូវបានគេហៅថាតាមកាលកំណត់ ហើយរយៈពេលទាំងនេះត្រូវបានគេហៅថារយៈពេលលំយោល។
អាស្រ័យលើលក្ខណៈរូបវន្តនៃបាតុភូត លំយោលត្រូវបានសម្គាល់៖ មេកានិច អេឡិចត្រូម៉ាញេទិច អេឡិចត្រូម៉ាញ៉េទិច។ល។
ការប្រែប្រួលគឺរីករាលដាលនៅក្នុងធម្មជាតិ និងបច្ចេកវិទ្យា។ ដំណើរការ Oscillatory ស្ថិតនៅក្រោមសាខាមួយចំនួននៃមេកានិច។ នៅក្នុងវគ្គនៃការបង្រៀននេះ យើងនឹងនិយាយតែអំពីរំញ័រមេកានិចប៉ុណ្ណោះ។
អាស្រ័យលើធម្មជាតិនៃផលប៉ះពាល់លើប្រព័ន្ធលំយោល លំយោលត្រូវបានសម្គាល់៖ 1. សេរី ឬធម្មជាតិ 2. លំយោលដោយបង្ខំ 3. លំយោលដោយខ្លួនឯង 4. លំយោលប៉ារ៉ាម៉ែត។
លំយោលឥតគិតថ្លៃត្រូវបានគេហៅថាលំយោលដែលកើតឡើងដោយគ្មានឥទ្ធិពលខាងក្រៅហើយបណ្តាលមកពី "ការរុញ" ដំបូង។
ការរំញ័រដោយបង្ខំកើតឡើងក្រោមសកម្មភាពនៃកម្លាំងខាងក្រៅតាមកាលកំណត់
ការយោលដោយខ្លួនឯងក៏ត្រូវបានអនុវត្តក្រោមសកម្មភាពនៃកម្លាំងខាងក្រៅដែរ ប៉ុន្តែពេលនៃសកម្មភាពរបស់កម្លាំងនៅលើប្រព័ន្ធត្រូវបានកំណត់ដោយប្រព័ន្ធលំយោលខ្លួនឯង។
ជាមួយនឹងលំយោលប៉ារ៉ាម៉ែត្រដោយសារតែឥទ្ធិពលខាងក្រៅការផ្លាស់ប្តូរតាមកាលកំណត់នៅក្នុងប៉ារ៉ាម៉ែត្រនៃប្រព័ន្ធកើតឡើងដែលបណ្តាលឱ្យប្រភេទនៃលំយោល។
ទម្រង់សាមញ្ញបំផុតគឺ រំញ័រអាម៉ូនិក
រំញ័រអាម៉ូនិក គឺជារំញ័រដែលកើតឡើងតាមច្បាប់អំពើបាប ឬcos . ឧទាហរណ៍នៃលំយោលអាម៉ូនិកគឺលំយោលនៃប៉ោលគណិតវិទ្យា
គម្លាតអតិបរមានៃបរិមាណលំយោលនៅក្នុងដំណើរការនៃការលំយោលត្រូវបានគេហៅថា ទំហំនៃលំយោល។(ប៉ុន្តែ) . ពេលវេលាដែលវាត្រូវការដើម្បីបញ្ចប់លំយោលពេញលេញមួយត្រូវបានគេហៅថា រយៈពេលនៃលំយោល។(ត) . បដិវត្តនៃរយៈពេលនៃការយោលត្រូវបានគេហៅថា ប្រេកង់យោល។() ។ ជាញឹកញាប់ភាពប្រែប្រួលគុណនឹង 2 ត្រូវបានគេហៅថា ប្រេកង់វដ្ត() ។ ដូច្នេះ លំយោលអាម៉ូនិកត្រូវបានពិពណ៌នាដោយកន្សោម
នៅទីនេះ ( t+ 0 ) ដំណាក់កាលលំយោល និង 0 - ដំណាក់កាលដំបូង
ប្រព័ន្ធ oscillatory មេកានិចសាមញ្ញបំផុតត្រូវបានគេហៅថា: គណិតវិទ្យានិទាឃរដូវនិងប៉ោលរាងកាយ។ ចូរយើងពិនិត្យមើលកាន់តែដិតដល់នូវប៉ោលទាំងនេះ។
៨.១. ប៉ោលគណិតវិទ្យា
ប៉ោលគណិតវិទ្យាគឺជាប្រព័ន្ធលំយោលដែលមានតួចំណុចដ៏ធំមួយដែលផ្អាកនៅក្នុងវាលទំនាញនៅលើខ្សែស្រលាយគ្មានទម្ងន់ដែលមិនអាចពង្រីកបាន។

នៅចំណុចខាងក្រោមប៉ោលមានអប្បបរមានៃថាមពលសក្តានុពល។ ចូរបង្វែរប៉ោលនៅមុំមួយ ។ ចំណុចកណ្តាលនៃទំនាញនៃរាងកាយចំណុចដ៏ធំមួយនឹងកើនឡើងដល់កម្ពស់មួយ។ hហើយក្នុងករណីនេះថាមពលសក្តានុពលនៃប៉ោលនឹងកើនឡើងដោយតម្លៃ មីលីក្រាម h. លើសពីនេះទៀតនៅក្នុងទីតាំងផ្លាតទម្ងន់ត្រូវបានប៉ះពាល់ដោយទំនាញនិងភាពតានតឹងនៃខ្សែស្រឡាយ។ បន្ទាត់នៃសកម្មភាពនៃកម្លាំងទាំងនេះមិនស្របគ្នាទេ ហើយកម្លាំងលទ្ធផលធ្វើសកម្មភាពលើបន្ទុក ដោយទំនោរឱ្យវាត្រឡប់ទៅទីតាំងលំនឹងវិញ។ ប្រសិនបើការផ្ទុកមិនត្រូវបានរក្សាទុកទេនោះនៅក្រោមសកម្មភាពនៃកម្លាំងនេះវានឹងចាប់ផ្តើមផ្លាស់ទីទៅទីតាំងលំនឹងដំបូងថាមពល kinetic របស់វានឹងកើនឡើងដោយសារតែការកើនឡើងនៃល្បឿនខណៈពេលដែលថាមពលសក្តានុពលនឹងថយចុះ។ នៅពេលឈានដល់ចំណុចលំនឹង កម្លាំងលទ្ធផលនឹងលែងធ្វើសកម្មភាពលើរាងកាយទៀតហើយ (កម្លាំងទំនាញនៅចំណុចនេះត្រូវបានផ្តល់សំណងដោយកម្លាំងនៃភាពតានតឹងខ្សែស្រឡាយ)។ ថាមពលសក្តានុពលនៃរាងកាយនៅចំណុចនេះនឹងមានតិចតួចបំផុត ហើយថាមពល kinetic ផ្ទុយទៅវិញនឹងមានរបស់វាផ្ទាល់។ តម្លៃអតិបរមា. រាងកាយដែលផ្លាស់ទីដោយនិចលភាពនឹងឆ្លងកាត់ទីតាំងលំនឹងហើយចាប់ផ្តើមផ្លាស់ទីឆ្ងាយពីវាដែលនឹងនាំឱ្យមានការលេចឡើងនៃកម្លាំងលទ្ធផល (ពីភាពតានតឹងនិងទំនាញផែនដី) ដែលនឹងត្រូវបានដឹកនាំប្រឆាំងនឹងចលនានៃរាងកាយយឺត។ ចុះ។ នេះចាប់ផ្តើមថយចុះ ថាមពល kineticទំនិញនិងការកើនឡើងរបស់វា។ ថាមពលសក្តានុពល. ដំណើរការនេះនឹងបន្តរហូតដល់ការអស់ទាំងស្រុងនៃទុនបម្រុងថាមពល kinetic និងការផ្លាស់ប្តូររបស់វាទៅជាថាមពលសក្តានុពល។ ក្នុងករណីនេះគម្លាតនៃបន្ទុកពីទីតាំងលំនឹងនឹងឈានដល់តម្លៃអតិបរមាហើយដំណើរការនឹងត្រូវធ្វើម្តងទៀត។ ប្រសិនបើមិនមានការកកិតនៅក្នុងប្រព័ន្ធទេនោះបន្ទុកនឹងយោលដោយគ្មានកំណត់។
ដូច្នេះប្រព័ន្ធមេកានិច oscillatory ត្រូវបានកំណត់លក្ខណៈដោយការពិតដែលថានៅពេលដែលពួកគេងាកចេញពីទីតាំងលំនឹង កម្លាំងស្ដារកើតឡើងនៅក្នុងប្រព័ន្ធដែលមានទំនោរត្រឡប់ប្រព័ន្ធទៅទីតាំងលំនឹង។ ក្នុងករណីនេះ លំយោលកើតឡើងអមដោយការផ្លាស់ប្តូរតាមកាលកំណត់នៃថាមពលសក្តានុពលនៃប្រព័ន្ធទៅជាថាមពល kinetic របស់វា និងច្រាសមកវិញ។
គណនា ដំណើរការ oscillatory. ពេលនៃកម្លាំង មការធ្វើសកម្មភាពនៅលើប៉ោលគឺជាក់ស្តែងស្មើនឹង - mglsin សញ្ញាដកឆ្លុះបញ្ចាំងពីការពិតដែលថា កម្លាំងមានទំនោរត្រឡប់បន្ទុកទៅទីតាំងលំនឹងរបស់វា។ ម្យ៉ាងវិញទៀត យោងតាមច្បាប់មូលដ្ឋាន ចលនាបង្វិល ម =លេខសម្គាល់ 2 / dt 2 . ដូច្នេះ យើងទទួលបានសមភាព
ខ  ចូរយើងពិចារណាតែមុំតូចនៃគម្លាតនៃប៉ោលពីទីតាំងលំនឹង។ បន្ទាប់មក អំពើបាប
≈
.
ហើយសមភាពរបស់យើងនឹងមានទម្រង់៖
ចូរយើងពិចារណាតែមុំតូចនៃគម្លាតនៃប៉ោលពីទីតាំងលំនឹង។ បន្ទាប់មក អំពើបាប
≈
.
ហើយសមភាពរបស់យើងនឹងមានទម្រង់៖
ឃ  សម្រាប់ប៉ោលគណិតវិទ្យា វាជាការពិត ខ្ញុំ=
មីលីលីត្រ 2
. ការជំនួសសមភាពនេះទៅក្នុងកន្សោមលទ្ធផល យើងទទួលបានសមីការដែលពិពណ៌នាអំពីដំណើរការនៃលំយោលនៃប៉ោលគណិតវិទ្យា៖
សម្រាប់ប៉ោលគណិតវិទ្យា វាជាការពិត ខ្ញុំ=
មីលីលីត្រ 2
. ការជំនួសសមភាពនេះទៅក្នុងកន្សោមលទ្ធផល យើងទទួលបានសមីការដែលពិពណ៌នាអំពីដំណើរការនៃលំយោលនៃប៉ោលគណិតវិទ្យា៖
សមីការឌីផេរ៉ង់ស្យែលនេះពិពណ៌នាអំពីដំណើរការលំយោល។ ដំណោះស្រាយចំពោះសមីការនេះគឺមុខងារអាម៉ូនិក អំពើបាប( t+ 0 ) ឬ cos ( t+ 0 ) ជាការពិតណាស់ យើងជំនួសមុខងារទាំងនេះទៅក្នុងសមីការ ហើយទទួលបាន៖ 2 = g/ លីត្រ. ដូច្នេះប្រសិនបើលក្ខខណ្ឌនេះត្រូវបានបំពេញ នោះមុខងារ អំពើបាប( t+ 0 ) ឬ cos( t+ 0 ) បង្វែរសមីការឌីផេរ៉ង់ស្យែលនៃលំយោលទៅជាអត្តសញ្ញាណមួយ។
អូ 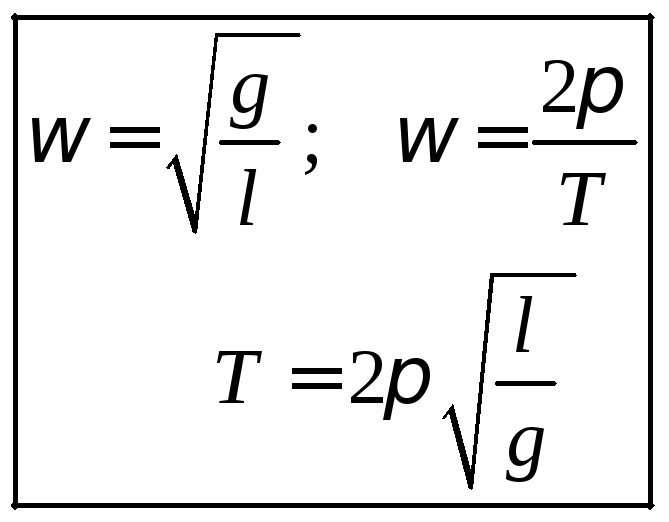 នៅទីនេះ ប្រេកង់រង្វិល និងរយៈពេលនៃការយោលនៃប៉ោលអាម៉ូនិក ត្រូវបានបង្ហាញជា៖
នៅទីនេះ ប្រេកង់រង្វិល និងរយៈពេលនៃការយោលនៃប៉ោលអាម៉ូនិក ត្រូវបានបង្ហាញជា៖
ទំហំនៃលំយោលត្រូវបានរកឃើញពីលក្ខខណ្ឌដំបូងនៃបញ្ហា។
ដូចដែលអ្នកអាចឃើញ ភាពញឹកញាប់ និងរយៈពេលនៃការយោលនៃប៉ោលគណិតវិទ្យាមិនអាស្រ័យលើម៉ាស់នៃបន្ទុកនោះទេ ហើយអាស្រ័យតែលើការបង្កើនល្បឿននៃការធ្លាក់ចុះដោយឥតគិតថ្លៃ និងប្រវែងនៃខ្សែព្យួរ ដែលធ្វើឱ្យវាអាចប្រើប៉ោលជា ឧបករណ៍សាមញ្ញ ប៉ុន្តែត្រឹមត្រូវបំផុតសម្រាប់កំណត់ការបង្កើនល្បឿននៃការធ្លាក់ចុះដោយឥតគិតថ្លៃ។
ប៉ោលមួយប្រភេទទៀត គឺរាងកាយដែលផ្អាកពីចំណុចណាមួយនៃរាងកាយ ហើយមានសមត្ថភាពធ្វើចលនាលំយោល។
៨.២. ប៉ោលរាងកាយ
អេ  ចូរយើងយករាងកាយតាមអំពើចិត្ត ទម្លុះវានៅចំណុចខ្លះជាមួយនឹងអ័ក្សដែលមិនស្របគ្នាជាមួយនឹងចំណុចកណ្តាលនៃម៉ាស់របស់វា ដែលនៅជុំវិញរាងកាយអាចបង្វិលដោយសេរី។ ផ្អាករាងកាយនៅលើអ័ក្សនេះ ហើយបង្វែរវាចេញពីទីតាំងលំនឹងដោយមុំខ្លះ
.
ចូរយើងយករាងកាយតាមអំពើចិត្ត ទម្លុះវានៅចំណុចខ្លះជាមួយនឹងអ័ក្សដែលមិនស្របគ្នាជាមួយនឹងចំណុចកណ្តាលនៃម៉ាស់របស់វា ដែលនៅជុំវិញរាងកាយអាចបង្វិលដោយសេរី។ ផ្អាករាងកាយនៅលើអ័ក្សនេះ ហើយបង្វែរវាចេញពីទីតាំងលំនឹងដោយមុំខ្លះ
.
ធ នៅពេលដែលនៅលើរាងកាយជាមួយនឹងនិចលភាពមួយភ្លែត ខ្ញុំអំពីអ័ក្ស អូពេលដែលត្រឡប់ទៅទីតាំងលំនឹងនឹងដំណើរការ ម = -
mglsin
និងការយោលនៃប៉ោលរូបវ័ន្ត ក៏ដូចជាគណិតវិទ្យា នឹងត្រូវបានពិពណ៌នាដោយសមីការឌីផេរ៉ង់ស្យែល៖
ដោយហេតុថាសម្រាប់ប៉ោលរូបវន្តផ្សេងគ្នា និចលភាពនៃនិចលភាពនឹងត្រូវបានបង្ហាញខុសគ្នា យើងនឹងមិនពណ៌នាវាដូចនៅក្នុងករណីនៃប៉ោលគណិតវិទ្យានោះទេ។ សមីការនេះក៏មានទម្រង់នៃសមីការលំយោល ដែលជាដំណោះស្រាយនៃមុខងារដែលពិពណ៌នាអំពីលំយោលអាម៉ូនិក។ ក្នុងករណីនេះប្រេកង់វដ្ត ( ) , រយៈពេលលំយោល។ (ត)បានកំណត់ថា:
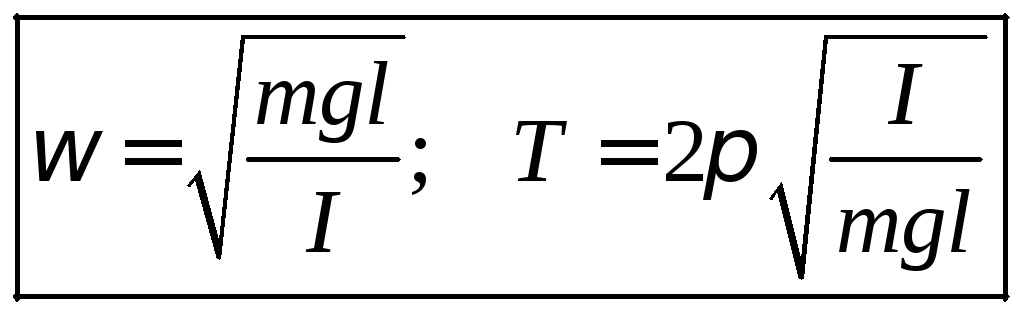
យើងឃើញថានៅក្នុងករណីនៃប៉ោលរូបវ័ន្ត រយៈពេលយោលគឺអាស្រ័យលើធរណីមាត្រនៃរាងកាយប៉ោល ហើយមិនមែនលើម៉ាស់របស់វាទេ ដូចជាក្នុងករណីប៉ោលគណិតវិទ្យា។ ពិតហើយ កន្សោមសម្រាប់ពេលនៃនិចលភាព រួមមានម៉ាស់នៃប៉ោលទៅថាមពលទីមួយ។ ពេលនៃនិចលភាពនៅក្នុងកន្សោមសម្រាប់រយៈពេលយោលគឺនៅក្នុងភាគយកខណៈពេលដែលម៉ាស់នៃប៉ោលត្រូវបានរួមបញ្ចូលនៅក្នុងភាគបែងនិងនៅក្នុងដឺក្រេទីមួយផងដែរ។ ដូច្នេះម៉ាស់នៅក្នុងភាគយកលុបចោលជាមួយនឹងម៉ាស់នៅក្នុងភាគបែង។
ប៉ោលរាងកាយមានលក្ខណៈមួយបន្ថែមទៀត - ប្រវែងកាត់បន្ថយ។
ប្រវែងកាត់បន្ថយនៃប៉ោលរូបវិទ្យា គឺជាប្រវែងនៃប៉ោលគណិតវិទ្យា ដែលជារយៈពេលដែលស្របគ្នានឹងរយៈពេលនៃប៉ោលរូបវិទ្យា។
និយមន័យនេះធ្វើឱ្យវាងាយស្រួលក្នុងការកំណត់កន្សោមសម្រាប់ប្រវែងកាត់បន្ថយ។
ការប្រៀបធៀបកន្សោមទាំងនេះយើងទទួលបាន

ប្រសិនបើនៅលើបន្ទាត់ដែលត្រូវបានដកចេញពីចំណុចនៃការព្យួរតាមរយៈចំណុចកណ្តាលនៃម៉ាស់នៃប៉ោលរាងកាយយើងគ្រោង (ចាប់ផ្តើមពីចំណុចនៃការព្យួរ) ប្រវែងកាត់បន្ថយនៃប៉ោលរាងកាយបន្ទាប់មកនៅចុងបញ្ចប់នៃផ្នែកនេះនឹងមានចំណុចមួយដែល មានទ្រព្យសម្បត្តិគួរឱ្យកត់សម្គាល់។ ប្រសិនបើប៉ោលរាងកាយត្រូវបានផ្អាកពីចំណុចនេះ នោះរយៈពេលយោលរបស់វានឹងដូចគ្នានឹងករណីនៃការព្យួរប៉ោលនៅចំណុចព្យួរពីមុនដែរ។ ចំណុចទាំងនេះត្រូវបានគេហៅថា មជ្ឈមណ្ឌលយោលនៃប៉ោលរូបវ័ន្ត។
ពិចារណាប្រព័ន្ធលំយោលដ៏សាមញ្ញមួយផ្សេងទៀតដែលដំណើរការលំយោលអាម៉ូនិក
៨.៣. ប៉ោលនិទាឃរដូវ
ទំ  ស្រមៃថានៅចុងបញ្ចប់នៃនិទាឃរដូវជាមួយនឹងមេគុណភាពរឹង kទម្ងន់ភ្ជាប់ ម.
ស្រមៃថានៅចុងបញ្ចប់នៃនិទាឃរដូវជាមួយនឹងមេគុណភាពរឹង kទម្ងន់ភ្ជាប់ ម.
ប្រសិនបើយើងផ្លាស់ទីបន្ទុកតាមអ័ក្ស x ដោយលាតសន្ធឹងនិទាឃរដូវ នោះកម្លាំងដែលត្រឡប់ទៅទីតាំងលំនឹងនឹងធ្វើសកម្មភាពលើបន្ទុក។ ច ត្រឡប់មកវិញ = - kx. ប្រសិនបើបន្ទុកត្រូវបានបញ្ចេញនោះកម្លាំងនេះនឹងបណ្តាលឱ្យមានការបង្កើនល្បឿន ឃ 2 x / dt 2 . យោងតាមច្បាប់ទី 2 របស់ញូតុនយើងទទួលបាន:
md 2 x / dt 2 = - kxពីសមីការនេះ យើងទទួលបានសមីការសម្រាប់ការយោលនៃបន្ទុកនៅលើនិទាឃរដូវក្នុងទម្រង់ចុងក្រោយរបស់វា៖ ឃ 2 x / dt 2 + (k/ ម) x = 0
អ៊ី  បន្ទាប់មកសមីការលំយោលមានទម្រង់ដូចគ្នាទៅនឹងសមីការលំយោលនៅក្នុងករណីដែលបានពិចារណារួចហើយ ដែលមានន័យថាដំណោះស្រាយចំពោះសមីការនេះនឹងមានមុខងារអាម៉ូនិកដូចគ្នា។ ប្រេកង់ និងរយៈពេលនៃការយោលនឹងស្មើគ្នា
បន្ទាប់មកសមីការលំយោលមានទម្រង់ដូចគ្នាទៅនឹងសមីការលំយោលនៅក្នុងករណីដែលបានពិចារណារួចហើយ ដែលមានន័យថាដំណោះស្រាយចំពោះសមីការនេះនឹងមានមុខងារអាម៉ូនិកដូចគ្នា។ ប្រេកង់ និងរយៈពេលនៃការយោលនឹងស្មើគ្នា
លើសពីនេះទៅទៀត កម្លាំងទំនាញមិនប៉ះពាល់ដល់លំយោលនៃប៉ោលនិទាឃរដូវនោះទេ។ ចាប់តាំងពីក្នុងករណីនេះវាគឺជាកត្តាធ្វើសកម្មភាពឥតឈប់ឈរដោយធ្វើសកម្មភាពគ្រប់ពេលវេលាក្នុងទិសដៅតែមួយហើយមិនមានអ្វីដែលត្រូវធ្វើជាមួយកម្លាំងស្ដារឡើងវិញទេ។
ដូច្នេះ ដូចដែលយើងឃើញដំណើរការ oscillatory នៅក្នុងប្រព័ន្ធ oscillatory មេកានិច វាត្រូវបានកំណត់លក្ខណៈជាចម្បងដោយវត្តមាននៅក្នុងប្រព័ន្ធ។ កម្លាំងស្តារឡើងវិញធ្វើសកម្មភាពលើប្រព័ន្ធ ហើយលំយោលខ្លួនឯងត្រូវបានកំណត់លក្ខណៈដោយ៖ ទំហំនៃការប្រែប្រួលតាមរយៈពេល ប្រេកង់ និងដំណាក់កាលនៃការប្រែប្រួល។
